
EnNuSegNet: Enhancing Weakly Supervised Nucleus Segmentation through Feature Preservation and Edge Refinement

Abstract
:1. Introduction
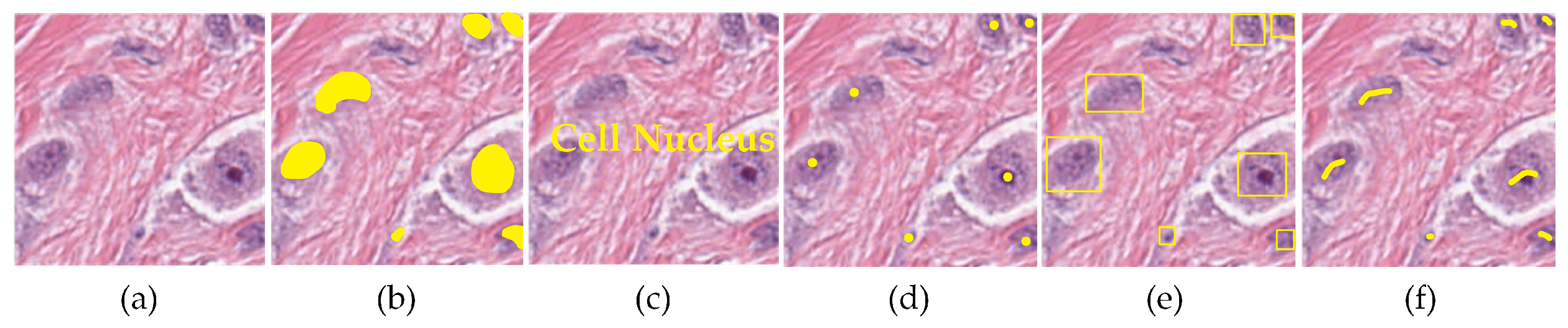
- In response to the labor-intensive and time-consuming nature of pixel-level annotation, we propose a weakly supervised cell nucleus image segmentation method that solely relies on point annotation.
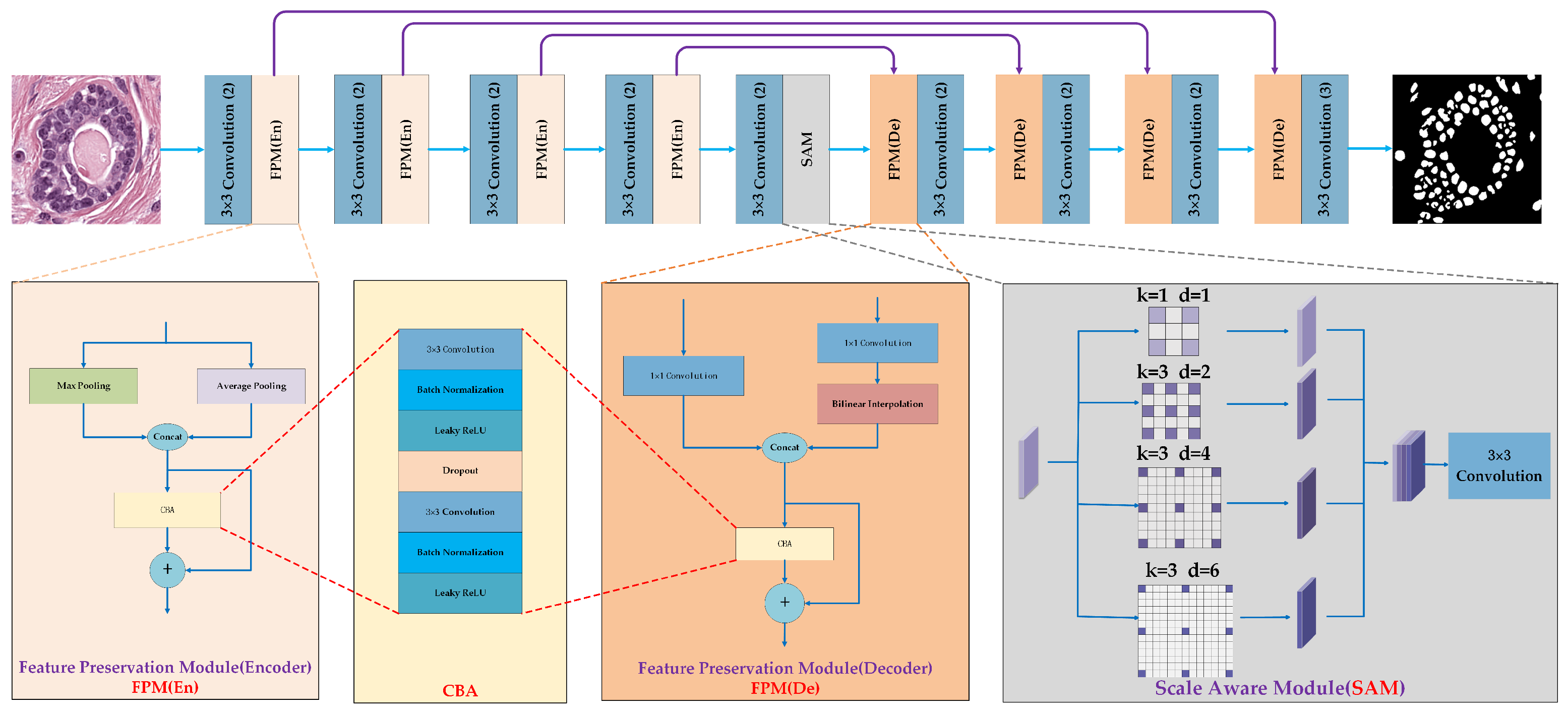
- To fully exploit the information provided by point annotations, we introduce a novel network structure, including the Feature Preservation Module (FPM) and Scale-Aware Module (SAM), enhancing segmentation performance under weak supervision conditions.
- To effectively segment the edges of cell nuclei under weakly supervised conditions, we propose the Nucleus Edge Regression module (NER) to guide the model in further optimizing segmentation results.
2. Related Work
2.1. Weakly Supervised Learning
2.2. Weakly Supervised Cell Nucleus Image Segmentation
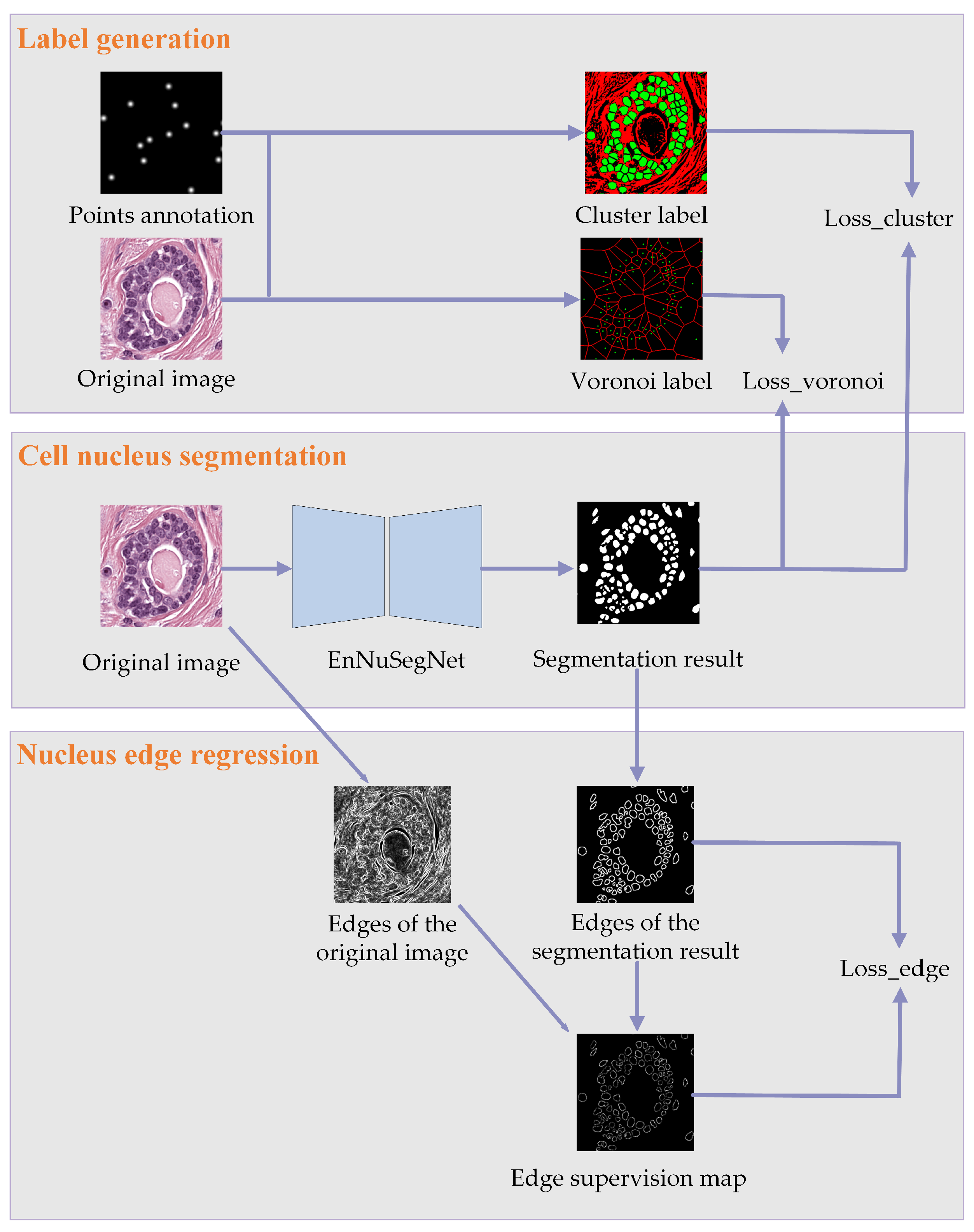
3. Methods
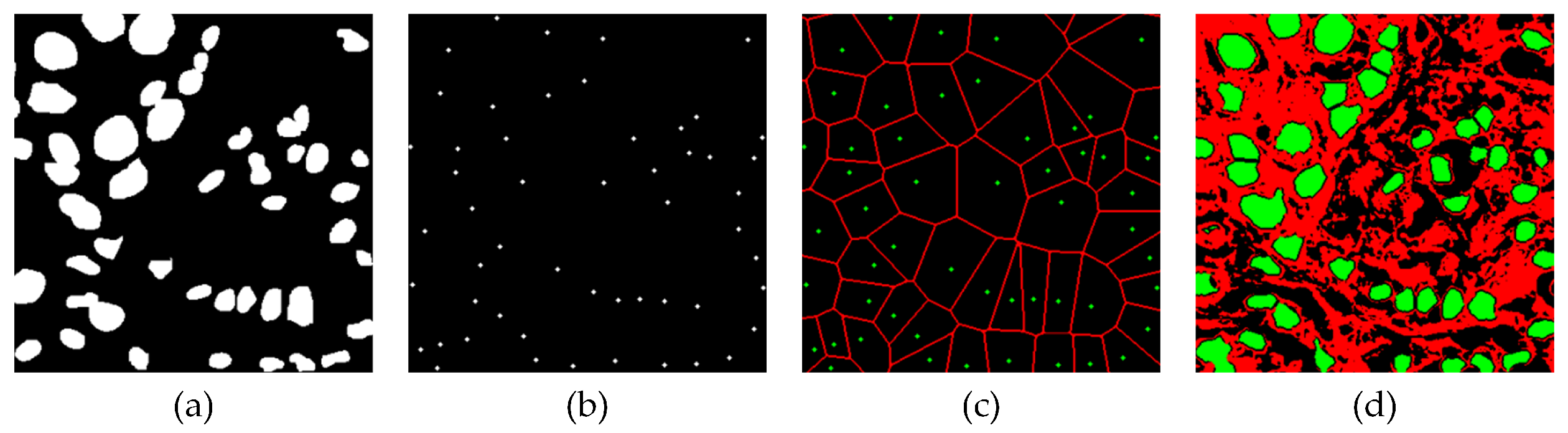
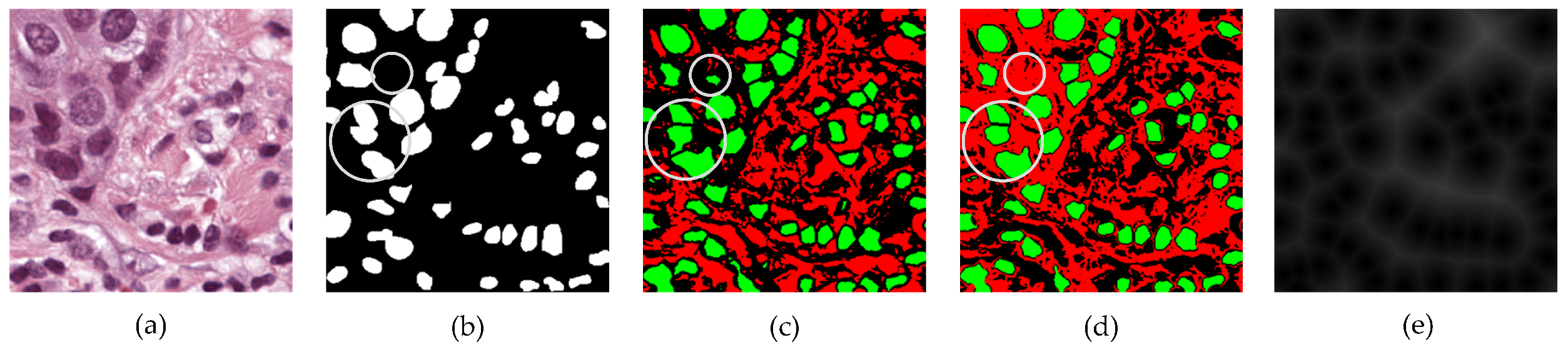
3.1. Label Generation
3.2. Nucleus Segmentation
3.2.1. Feature Preservation Module (FPM)
3.2.2. Scale-Aware Module (SAM)
3.3. Nucleus Edge Regression (NER)
4. Experiments and Results
4.1. Datasets and Performance Evaluation
4.2. Implementation Details
4.3. Results Analysis
4.3.1. Ablation Study
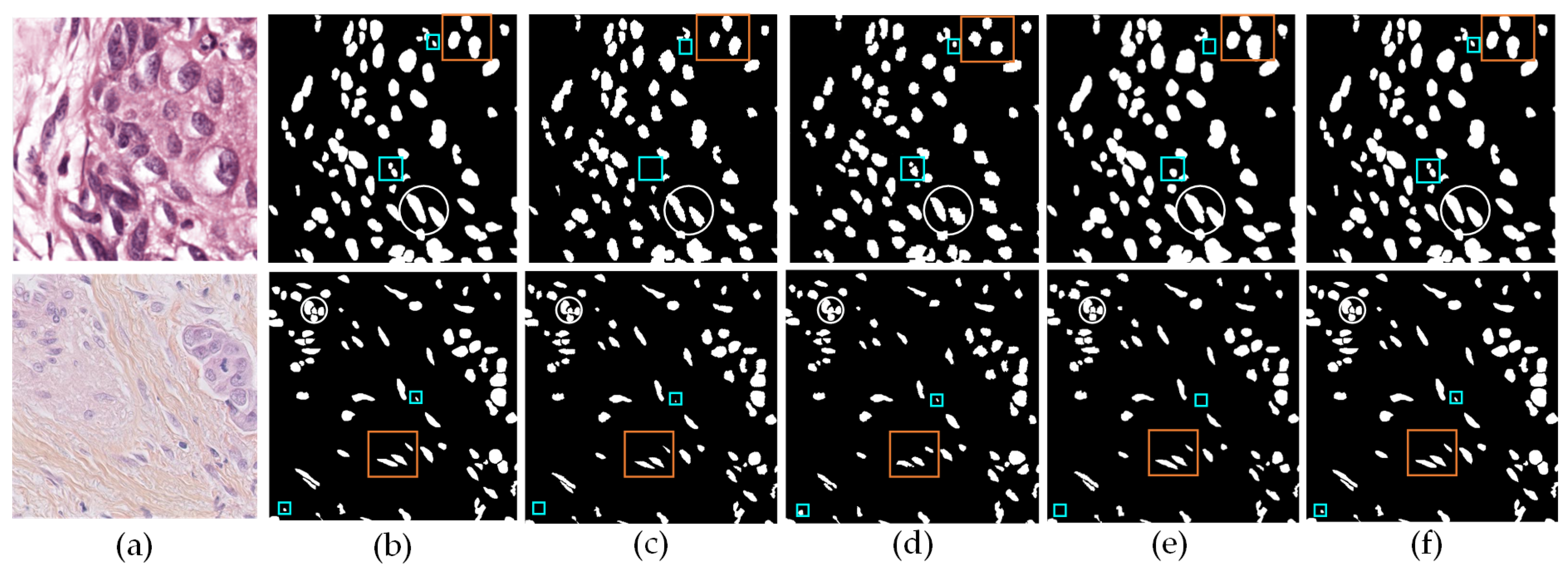
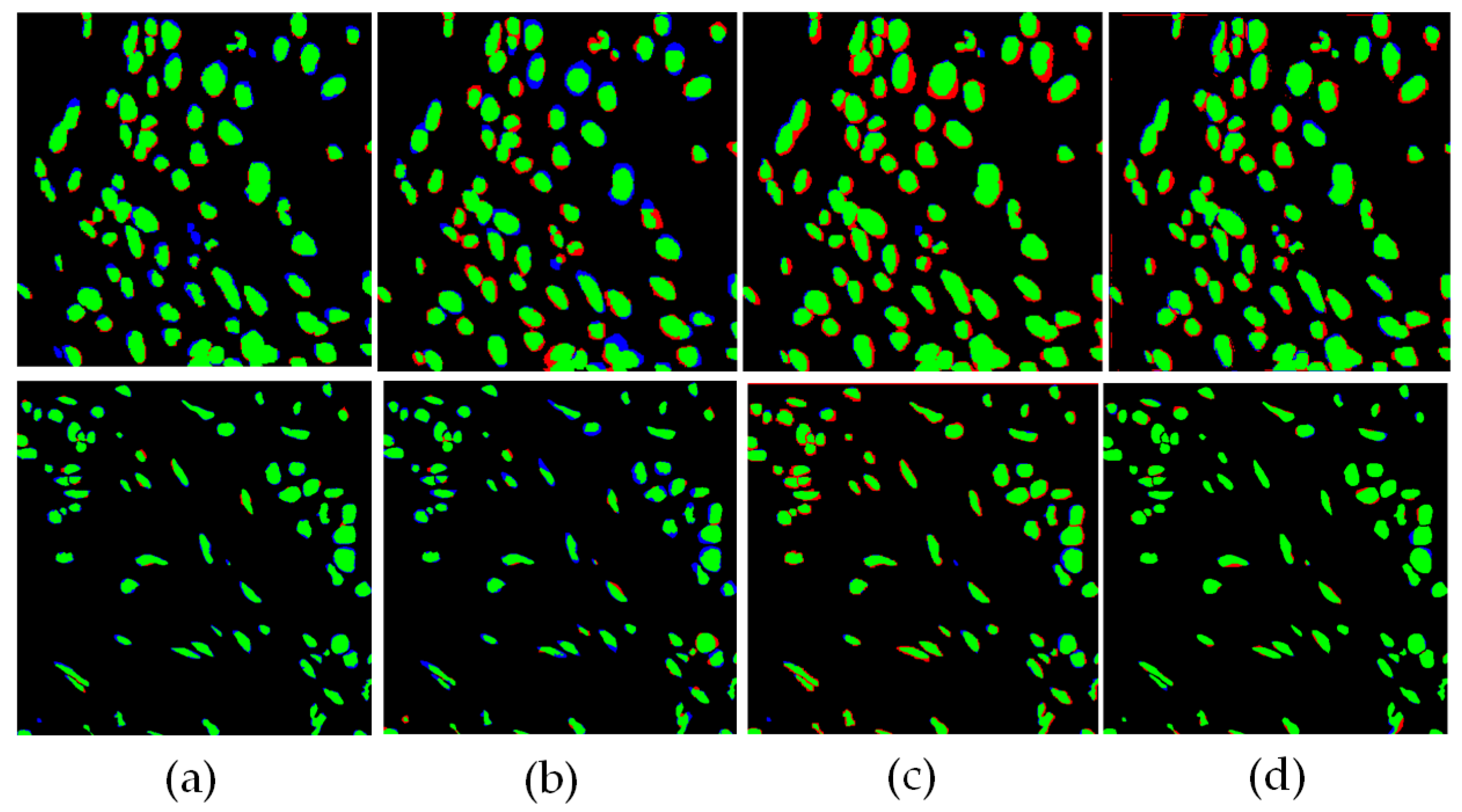
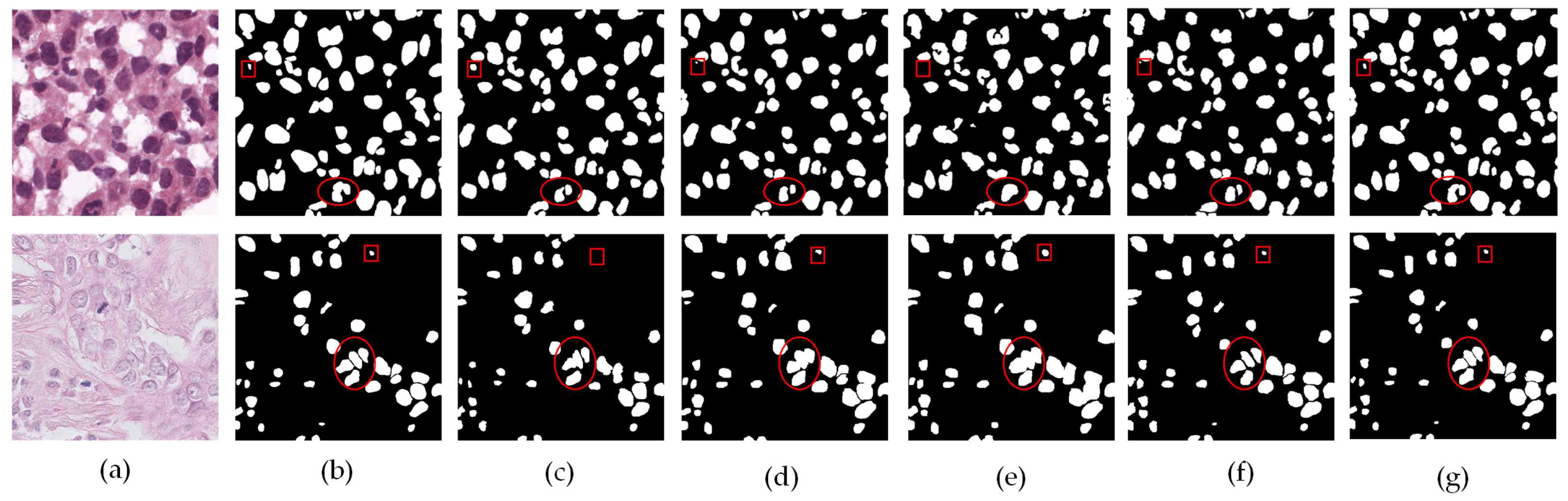
4.3.2. Comparison to Other Methods
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wong, A.N.N.; He, Z.; Leung, K.L.; To, C.C.K.; Wong, C.Y.; Wong, S.C.C.; Yoo, J.S.; Chan, C.K.R.; Chan, A.Z.; Lacambra, M.D.; et al. Current developments of artificial intelligence in digital pathology and its future clinical applications in gastrointestinal cancers. Cancers 2022, 14, 3780. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Wang, W.; Liu, D.; Hou, W.; Zhou, T.; Ji, Z. GeneSegNet: A deep learning framework for cell segmentation by integrating gene expression and imaging. Genome Biol. 2023, 24, 235. [Google Scholar] [CrossRef] [PubMed]
- Naylor, P.; Laé, M.; Reyal, F.; Walter, T. Segmentation of nuclei in histopathology images by deep regression of the distance map. IEEE Trans. Med. Imaging 2018, 38, 448–459. [Google Scholar] [CrossRef] [PubMed]
- Aatresh, A.A.; Yatgiri, R.p.; Chanchal, A.K.; Kumar, A.; Ravi, A.; Das, D.; BS, R.; Lal, S.; Kini, J. Efficient deep learning architecture with dimension-wise pyramid pooling for nuclei segmentation of histopathology images. Comput. Med. Imaging Graph. 2021, 93, 101975. [Google Scholar] [CrossRef] [PubMed]
- Kiran, I.; Raza, B.; Ijaz, A.; Khan, M.A. DenseRes-Unet: Segmentation of overlapped/clustered nuclei from multi organ histopathology images. Comput. Biol. Med. 2022, 143, 105267. [Google Scholar] [CrossRef] [PubMed]
- Ahmad, I.; Xia, Y.; Cui, H.; Islam, Z.U. DAN-NucNet: A dual attention based framework for nuclei segmentation in cancer histology images under wild clinical conditions. Expert Syst. Appl. 2023, 213, 118945. [Google Scholar] [CrossRef]
- Hancer, E.; Traoré, M.; Samet, R.; Yıldırım, Z.; Nemati, N. An imbalance-aware nuclei segmentation methodology for H&E stained histopathology images. Biomed. Signal Process. Control 2023, 83, 104720. [Google Scholar] [CrossRef]
- Zhou, Z.H. A brief introduction to weakly supervised learning. Natl. Sci. Rev. 2023, 5, 44–53. [Google Scholar] [CrossRef]
- Ghiasi, G.; Gu, X.Y.; Cui, Y.; Lin, T.Y. Scaling open-vocabulary image segmentation with image-level labels. In Proceedings of the European Conference on Computer Vision, Tel Aviv, Israel, 23–27 October 2022; Springer Nature: Cham, Switzerland, 2022; pp. 540–557. [Google Scholar] [CrossRef]
- Laradji, I.H.; Rostamzadeh, N.; Pinheiro, P.O.; Vazquez, D.; Schmidt, M. Where are the blobs: Counting by localization with point supervision. In Proceedings of the European Conference on Computer Vision (ECCV), Tel Aviv, Israel, 23–27 October 2022; pp. 547–562. [Google Scholar]
- Li, W.; Liu, W.; Zhu, J.; Cui, M.; Hua, X.S.; Zhang, L. Box-supervised instance segmentation with level set evolution. In Proceedings of the European Conference on Computer Vision, Tel Aviv, Israel, 23–27 October 2022; Springer Nature: Cham, Switzerland, 2022; pp. 1–18. [Google Scholar]
- Lin, D.; Dai, J.; Jia, J.; He, K.; Sun, J. Scaling open-vocabulary image segmentation with image-level labels. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 3159–3167. [Google Scholar]
- Qu, H.; Wu, P.; Huang, Q.; Yi, J.; Riedlinger, G.M.; De, S.; Metaxas, D.N. Weakly supervised deep nuclei segmentation using points annotation in histopathology images. In Proceedings of the International Conference on Medical Imaging with Deep Learning, London, UK, 8–10 July 2019; pp. 390–400. [Google Scholar]
- Yoo, I.; Yoo, D.; Paeng, K. Pseudoedgenet: Nuclei segmentation only with point annotations. In Proceedings of the Medical Image Computing and Computer Assisted Intervention—MICCAI 2019: 22nd International Conference, Shenzhen, China, 13–17 October 2019; Proceedings, Part I 22. pp. 731–739. [Google Scholar] [CrossRef]
- Nishimura, K.; Wang, C.; Watanabe, K.; Bise, R. Weakly supervised cell instance segmentation under various conditions. Med. Image Anal. 2021, 73, 102182. [Google Scholar] [CrossRef] [PubMed]
- Liu, W.; He, Q.; He, X. Weakly supervised nuclei segmentation via instance learning. In Proceedings of the 2022 IEEE 19th International Symposium on Biomedical Imaging (ISBI), Kolkata, India, 28–31 March 2022; pp. 1–5. [Google Scholar] [CrossRef]
- Lin, Y.; Qu, Z.; Chen, H.; Gao, Z.; Li, Y.; Xia, L.; Ma, K.; Zheng, Y.; Cheng, K.T. Nuclei segmentation with point annotations from pathology images via self-supervised learning and co-training. Med. Image Anal. 2023, 89, 102933. [Google Scholar] [CrossRef] [PubMed]
- Wang, W.; Sun, G.; Van, G.L. Looking beyond single images for weakly supervised semantic segmentation learning. IEEE Trans. Pattern Anal. Mach. Intell. 2022, 99, 1. [Google Scholar] [CrossRef] [PubMed]
- Ahn, J.; Kwak, S. Learning pixel-level semantic affinity with image-level supervision for weakly supervised semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 4981–4990. [Google Scholar] [CrossRef]
- Bearman, A.; Russakovsky, O.; Ferrari, V.; Fei-Fei, L. What’s the point: Semantic segmentation with point supervision. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 11–14 October 2016; Springer International Publishing: Cham, Switzerland, 2016; pp. 549–565. [Google Scholar] [CrossRef]
- Dai, J.; He, K.; Sun, J. Boxsup: Exploiting bounding boxes to supervise convolutional networks for semantic segmentation. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 1635–1643. [Google Scholar] [CrossRef]
- Vernaza, P.; Chandraker, M. Learning random-walk label propagation for weakly-supervised semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 7158–7166. [Google Scholar] [CrossRef]
- Feng, J.; Li, C.; Wang, J. CAM-TMIL: A Weakly-Supervised Segmentation Framework for Histopathology based on CAMs and MIL. J. Phys. Conf. Ser. 2017, 2547, 012014. [Google Scholar] [CrossRef]
- Zhao, Z.; Yang, L.; Zheng, H.; Guldner, I.H.; Zhang, S.; Chen, D.Z. Deep learning based instance segmentation in 3D biomedical images using weak annotation. In Proceedings of the Medical Image Computing and Computer Assisted Intervention—MICCAI 2018: 21st International Conference, Granada, Spain, 16–20 September 2018; Proceedings, Part IV 11. Springer International Publishing: Cham, Switzerland, 2018; pp. 352–360. [Google Scholar] [CrossRef]
- Khalid, N.; Froes, T.C.; Caroprese, M.; Lovell, G.; Trygg, J.; Dengel, A.; Ahmed, S. PACE: Point Annotation-Based Cell Segmentation for Efficient Microscopic Image Analysis. In Proceedings of the International Conference on Artificial Neural Networks, Heraklion, Greece, 26 September 2023; Springer Nature: Cham, Switzerland, 2023; pp. 545–557. [Google Scholar]
- Zhao, Z.; Yang, L.; Zheng, H.; Guldner, I.H.; Zhang, S.; Chen, D.Z. Scribble2label: Scribble-supervised cell segmentation via self-generating pseudo-labels with consistency. In Proceedings of the Medical Image Computing and Computer Assisted Intervention—MICCAI 2020: 23rd International Conference, Lima, Peru, 4–8 October 2020; Proceedings, Part I 23. Springer International Publishing: Cham, Switzerland, 2020; pp. 14–23. [Google Scholar] [CrossRef]
- Chen, Z.; Chen, Z.; Liu, J.; Zheng, Q.; Zhu, Y.; Zuo, Y.; Wang, Z.; Guan, X.; Wang, Y.; Li, Y. Weakly supervised histopathology image segmentation with sparse point annotations. IEEE J. Biomed. Health Inform. 2020, 25, 1673–1685. [Google Scholar] [CrossRef] [PubMed]
- Guo, R.; Xie, K.; Pagnucco, M.; Song, Y. SAC-Net: Learning with weak and noisy labels in histopathology image segmentation. Med. Image Anal. 2023, 86, 102790. [Google Scholar] [CrossRef] [PubMed]
- Guo, R.; Xie, K.; Pagnucco, M.; Song, Y. Deeplab: Semantic image segmentation with deep convolutional nets, atrous convolution, and fully connected crfs. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 40, 834–848. [Google Scholar] [CrossRef]
- Kumar, N.; Verma, R.; Sharma, S.; Bhargava, S.; Vahadane, A.; Sethi, A. A dataset and a technique for generalized nuclear segmentation for computational pathology. IEEE Trans. Med. Imaging 2023, 36, 1550–1560. [Google Scholar] [CrossRef] [PubMed]
- Naylor, P.; Laé, M.; Reyal, F.; Walter, T. Nuclei segmentation in histopathology images using deep neural networks. In Proceedings of the 2017 IEEE 14th International Symposium on Biomedical Imaging (ISBI 2017), Melbourne, Australia, 18–21 April 2017; pp. 933–936. [Google Scholar] [CrossRef]
- Sirinukunwattana, K.; Snead, D.R.; Rajpoot, N.M. A stochastic polygons model for glandular structures in colon histology images. IEEE Trans. Med. Imaging 2015, 34, 2366–2378. [Google Scholar] [CrossRef] [PubMed]
- Rukundo, O. Effects of Image Size on Deep Learning. A stochastic polygons model for glandular structures in colon histology images. Electronics 2023, 12, 985. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-net: Convolutional networks for biomedical image segmentation. In Proceedings of the Medical Image Computing and Computer-Assisted Intervention—MICCAI 2015: 18th International Conference, Munich, Germany, 5–9 October 2015; Proceedings, Part III 18. Springer International Publishing: Cham, Switzerland, 2015; pp. 234–241. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| FPM | SAM | NER | MultiOrgan | TNBC | ||||
|---|---|---|---|---|---|---|---|---|
| F1 | Dice | AJI | F1 | Dice | AJI | |||
| ✗ | ✗ | ✗ | 0.7637 | 0.7145 | 0.5059 | 0.7421 | 0.7228 | 0.5241 |
| ✔ | ✗ | ✗ | 0.7744 | 0.7434 | 0.5366 | 0.7531 | 0.7408 | 0.5435 |
| ✗ | ✔ | ✗ | 0.7936 | 0.7173 | 0.5237 | 0.7717 | 0.7384 | 0.5396 |
| ✗ | ✗ | ✔ | 0.7861 | 0.7318 | 0.5442 | 0.7608 | 0.7522 | 0.5726 |
| ✔ | ✔ | ✔ | 0.7991 | 0.7487 | 0.5501 | 0.7762 | 0.7588 | 0.5745 |
| Methods | Supervision Mode | F1 | Dice | AJI |
|---|---|---|---|---|
| UNet [34] | f | 0.8354 | 0.7725 | 0.5723 |
| Qu et al. [13] (2019) | w | 0.7744 | 0.7316 | 0.5265 |
| Liu et al. [16] (2022) | w | 0.7687 | 0.7179 | 0.5197 |
| Chen et al. [27] (2023) | w | 0.7473 | 0.7122 | 0.5145 |
| Guo et al. [28] (2023) | w | 0.7789 | 0.7346 | 0.5342 |
| Our | w | 0.7991 | 0.7487 | 0.5501 |
| Methods | Supervision Mode | F1 | Dice | AJI |
|---|---|---|---|---|
| UNet [34] | f | 0.8127 | 0.7842 | 0.5945 |
| Qu et al. [13] (2019) | w | 0.7632 | 0.7375 | 0.5413 |
| Liu et al. [16] (2022) | w | 0.7583 | 0.7316 | 0.5389 |
| Chen et al. [27] (2023) | w | 0.7397 | 0.7274 | 0.5316 |
| Guo et al. [28] (2023) | w | 0.7658 | 0.7407 | 0.5528 |
| Our | w | 0.7762 | 0.7588 | 0.5746 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, X.; Ruan, Q.; Chen, L.; Sheng, G.; Chen, P. EnNuSegNet: Enhancing Weakly Supervised Nucleus Segmentation through Feature Preservation and Edge Refinement. Electronics 2024, 13, 504. https://doi.org/10.3390/electronics13030504
Chen X, Ruan Q, Chen L, Sheng G, Chen P. EnNuSegNet: Enhancing Weakly Supervised Nucleus Segmentation through Feature Preservation and Edge Refinement. Electronics. 2024; 13(3):504. https://doi.org/10.3390/electronics13030504
Chicago/Turabian StyleChen, Xiaohui, Qisheng Ruan, Lingjun Chen, Guanqun Sheng, and Peng Chen. 2024. "EnNuSegNet: Enhancing Weakly Supervised Nucleus Segmentation through Feature Preservation and Edge Refinement" Electronics 13, no. 3: 504. https://doi.org/10.3390/electronics13030504