
Development of an Autonomous Robot Replenishment System for Convenience Stores


Abstract
:1. Introduction
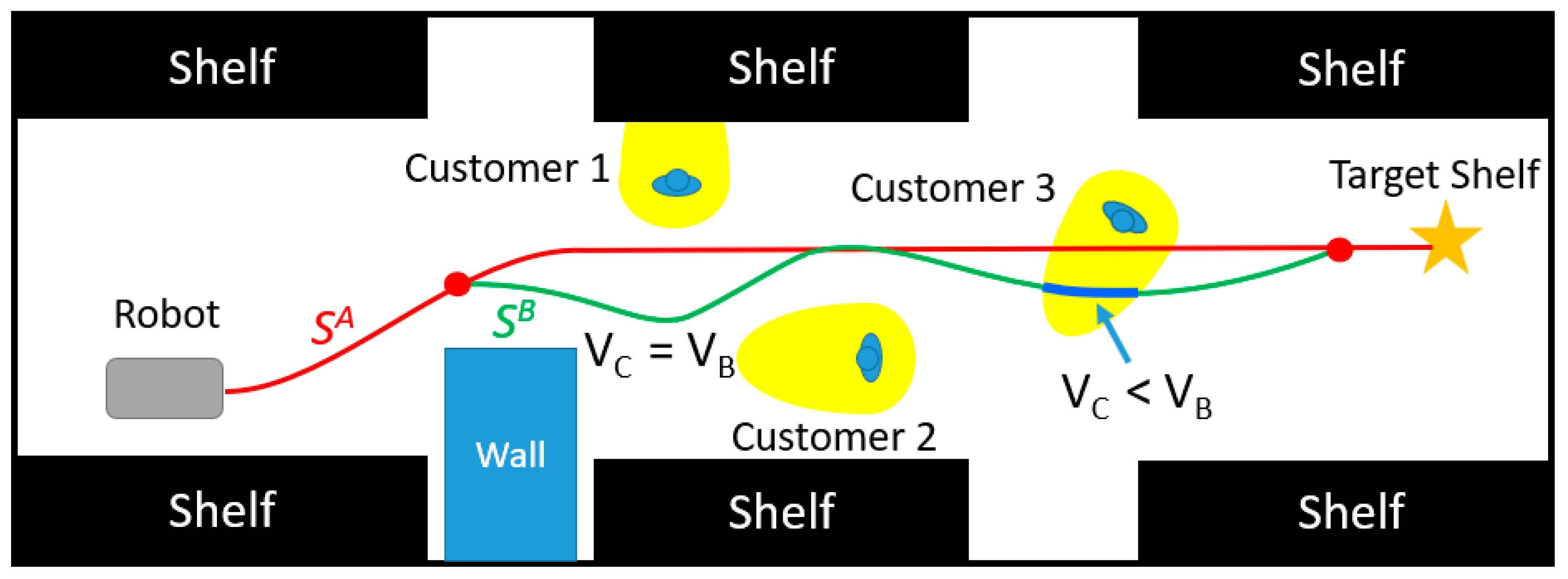
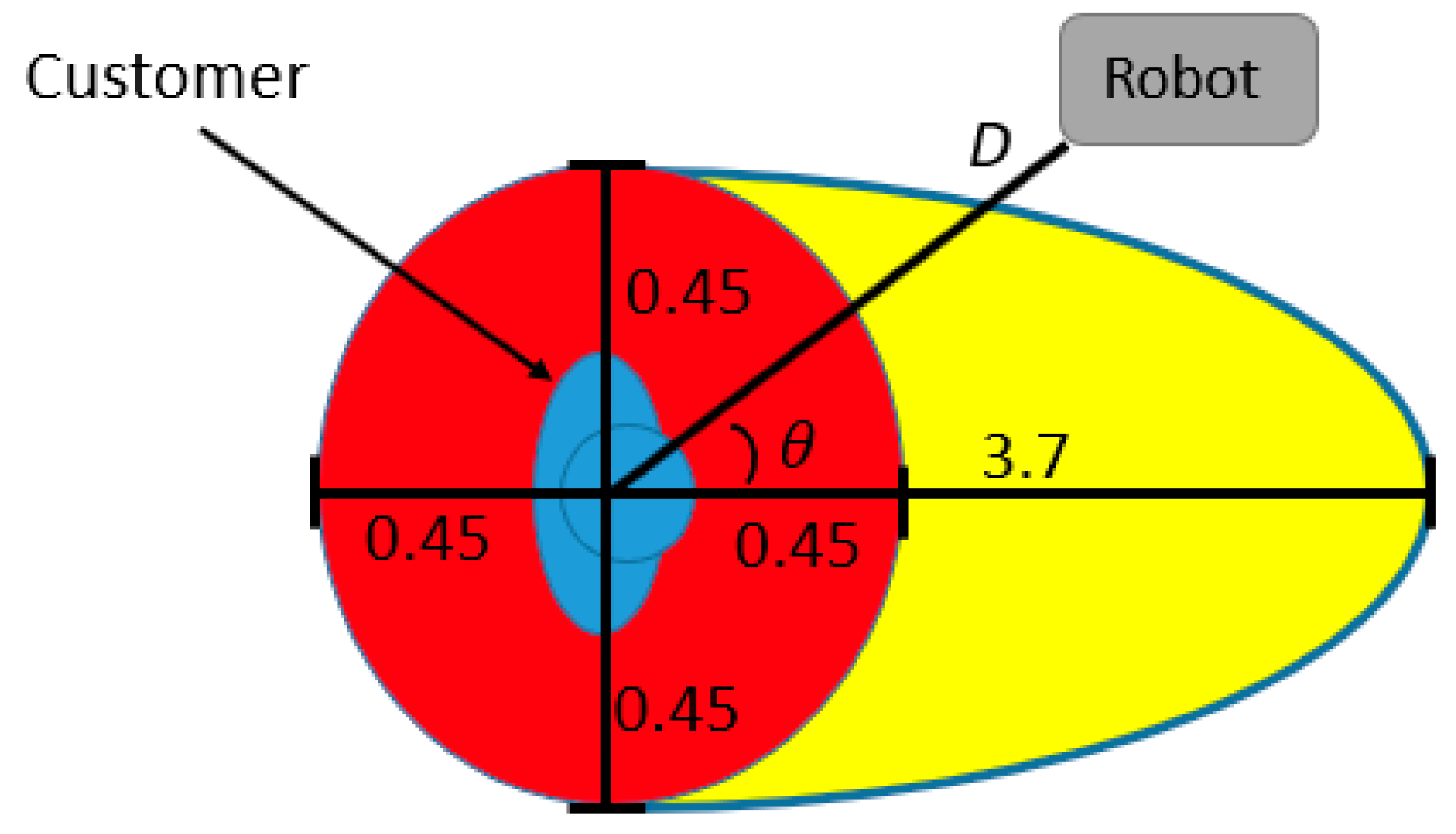
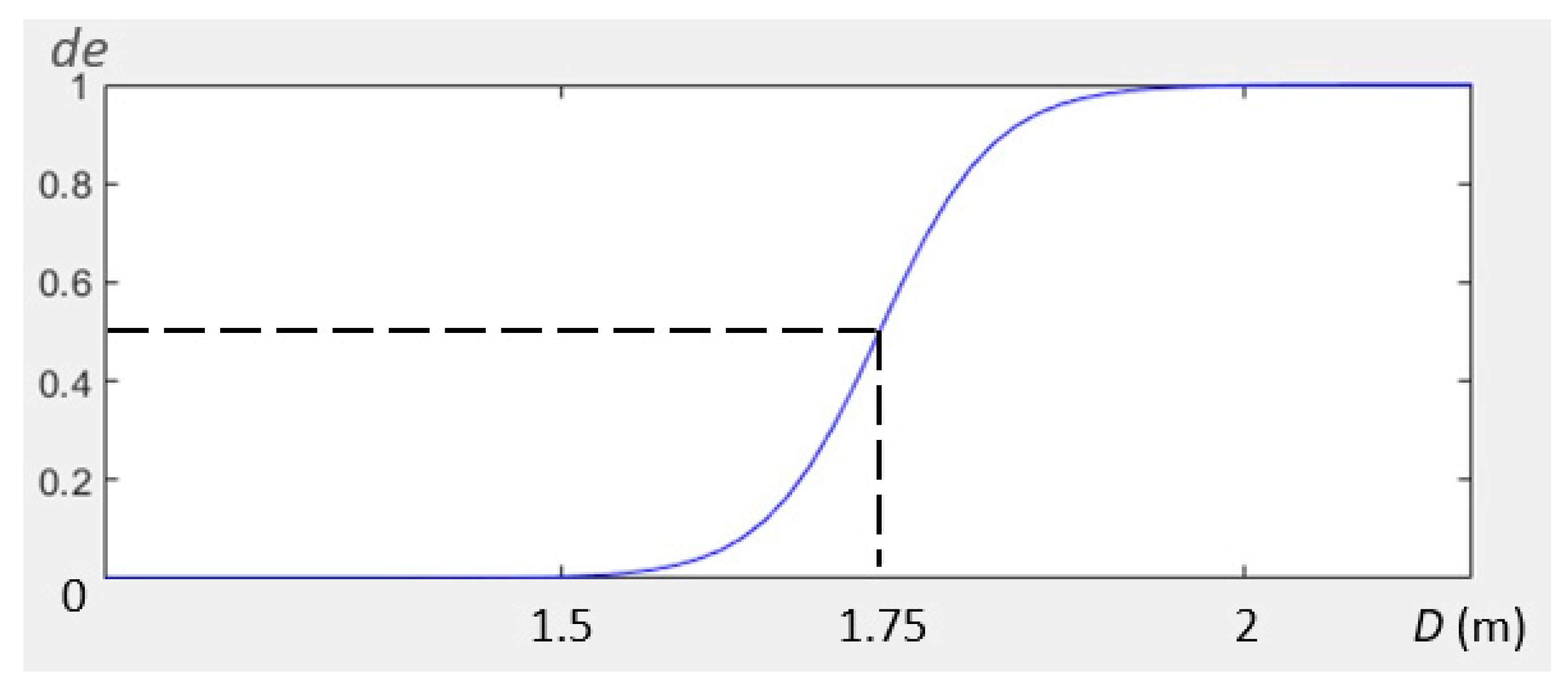
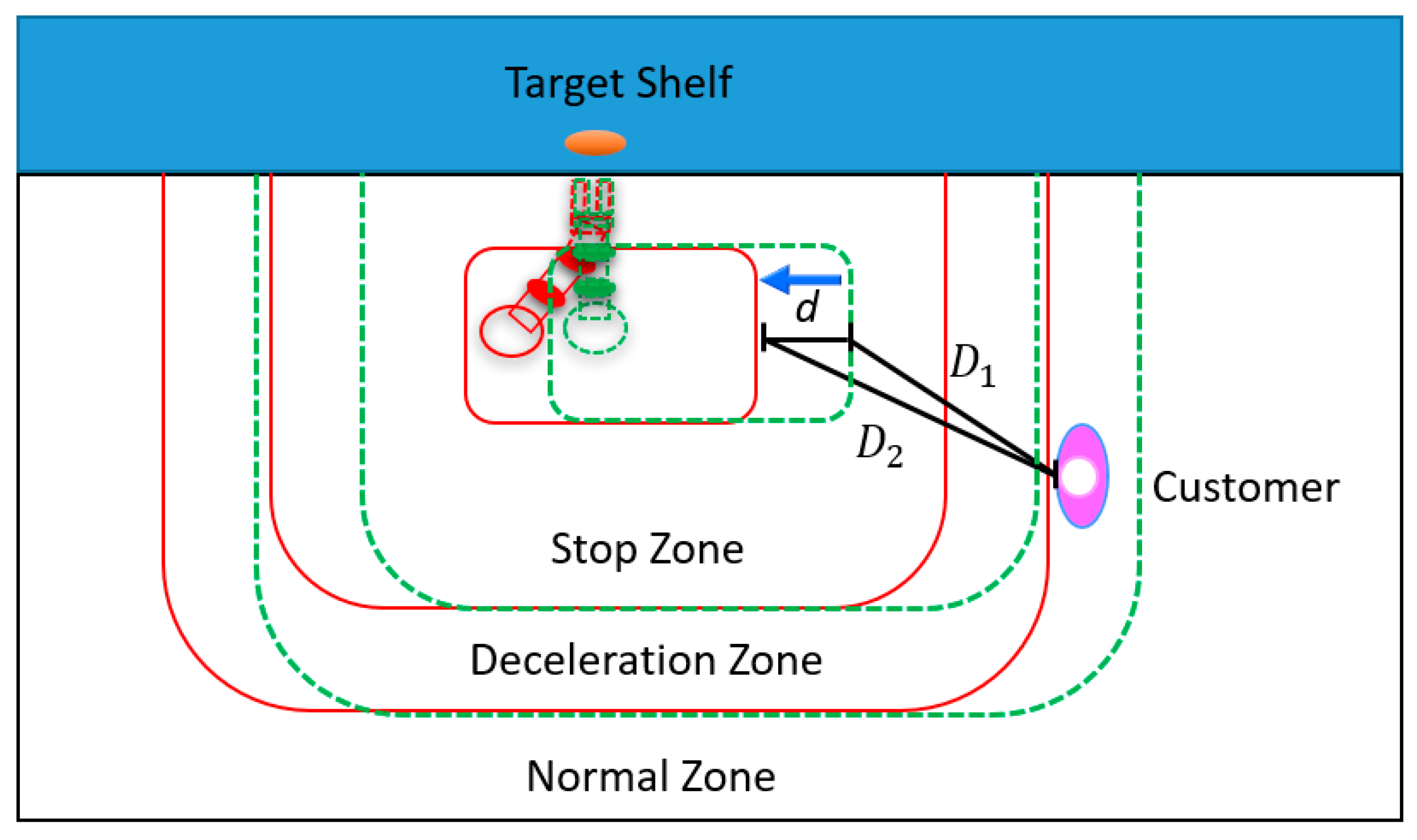
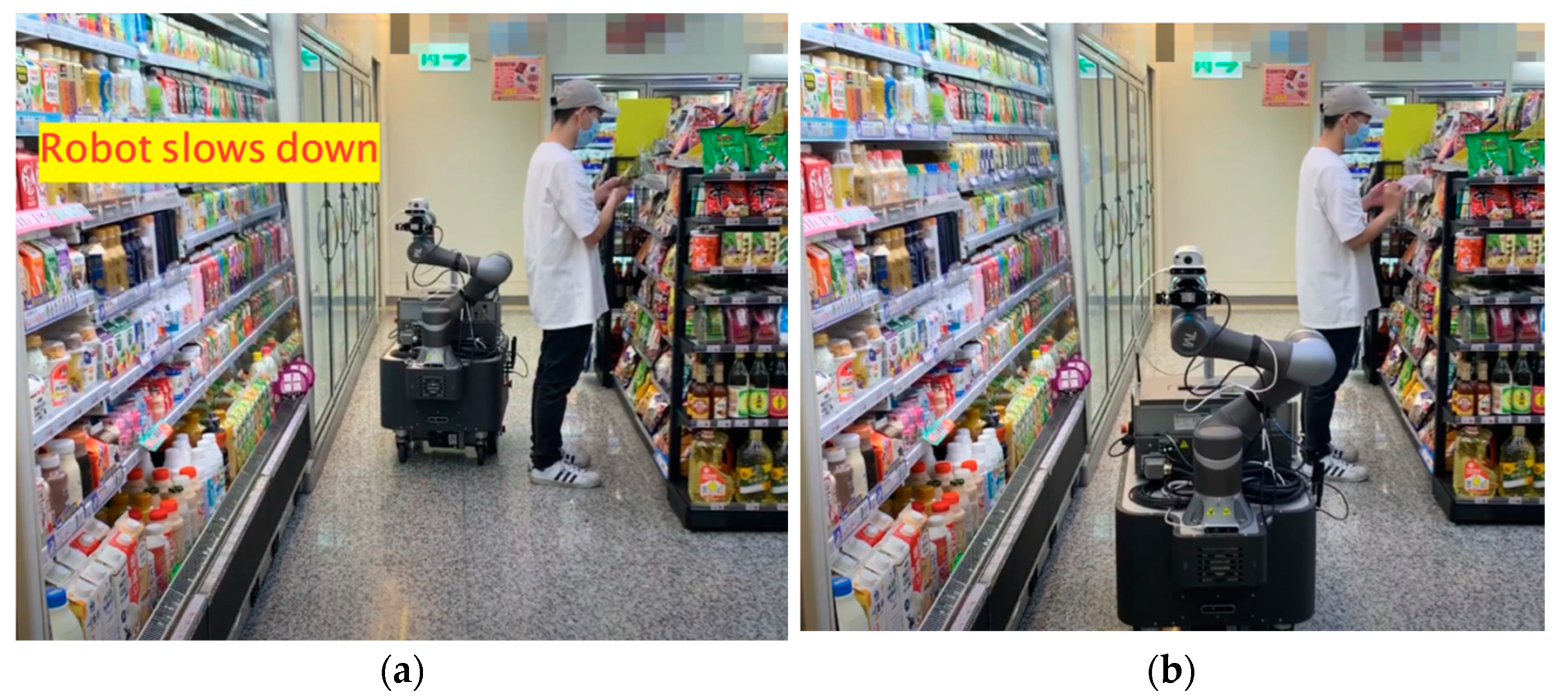
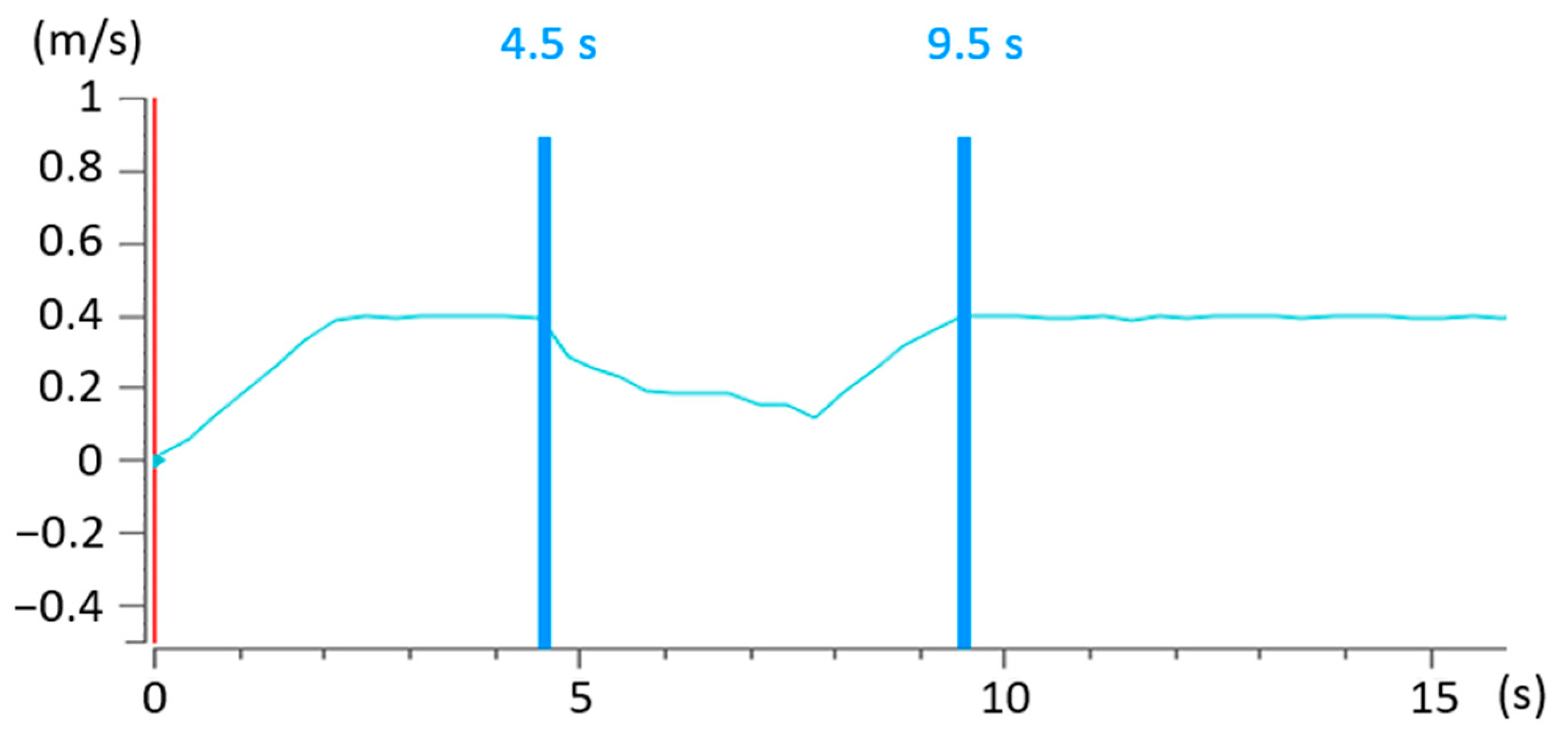
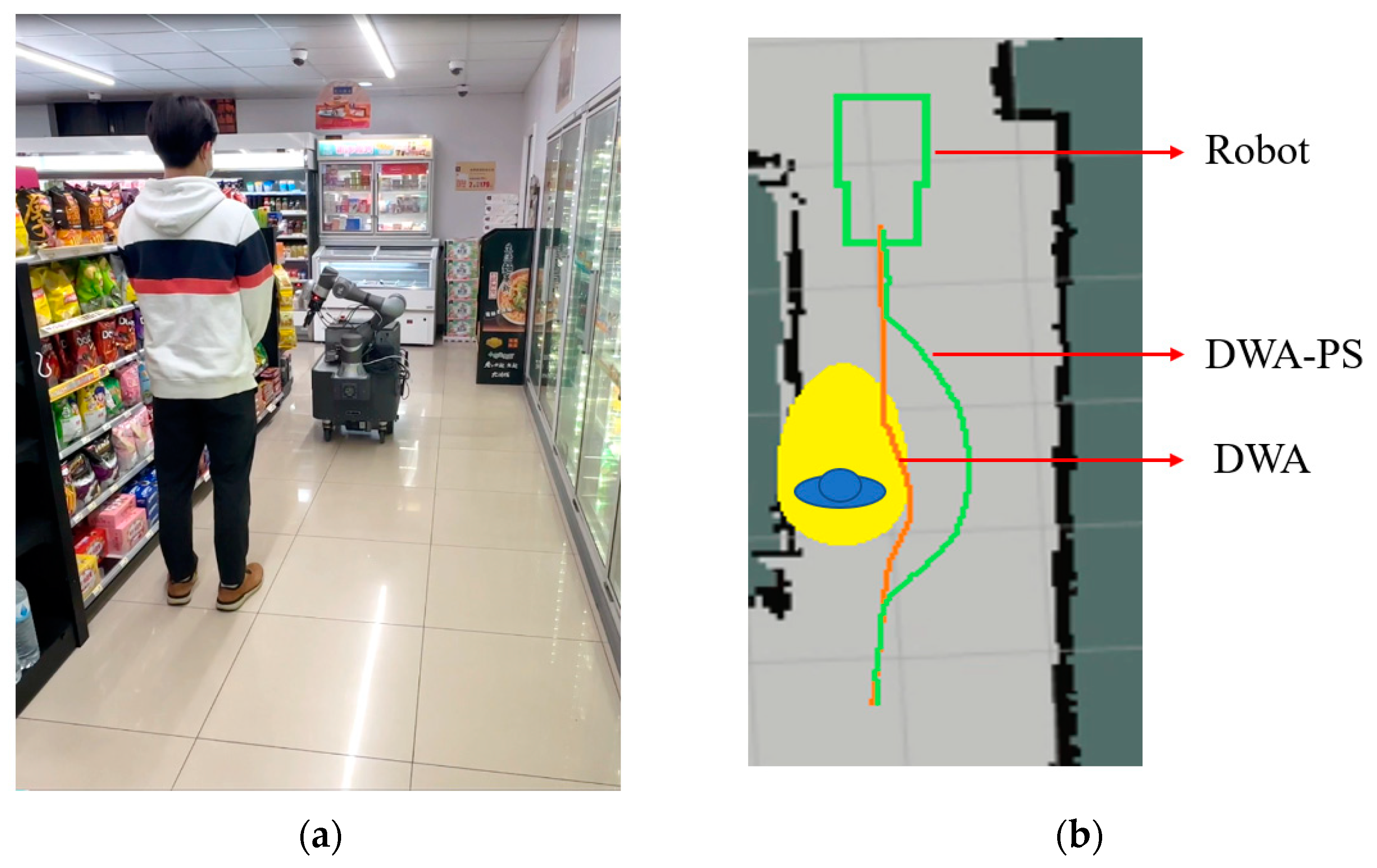
- A new collision-free path planning algorithm, DWA-PS, is developed that considers both customer safety and comfort.
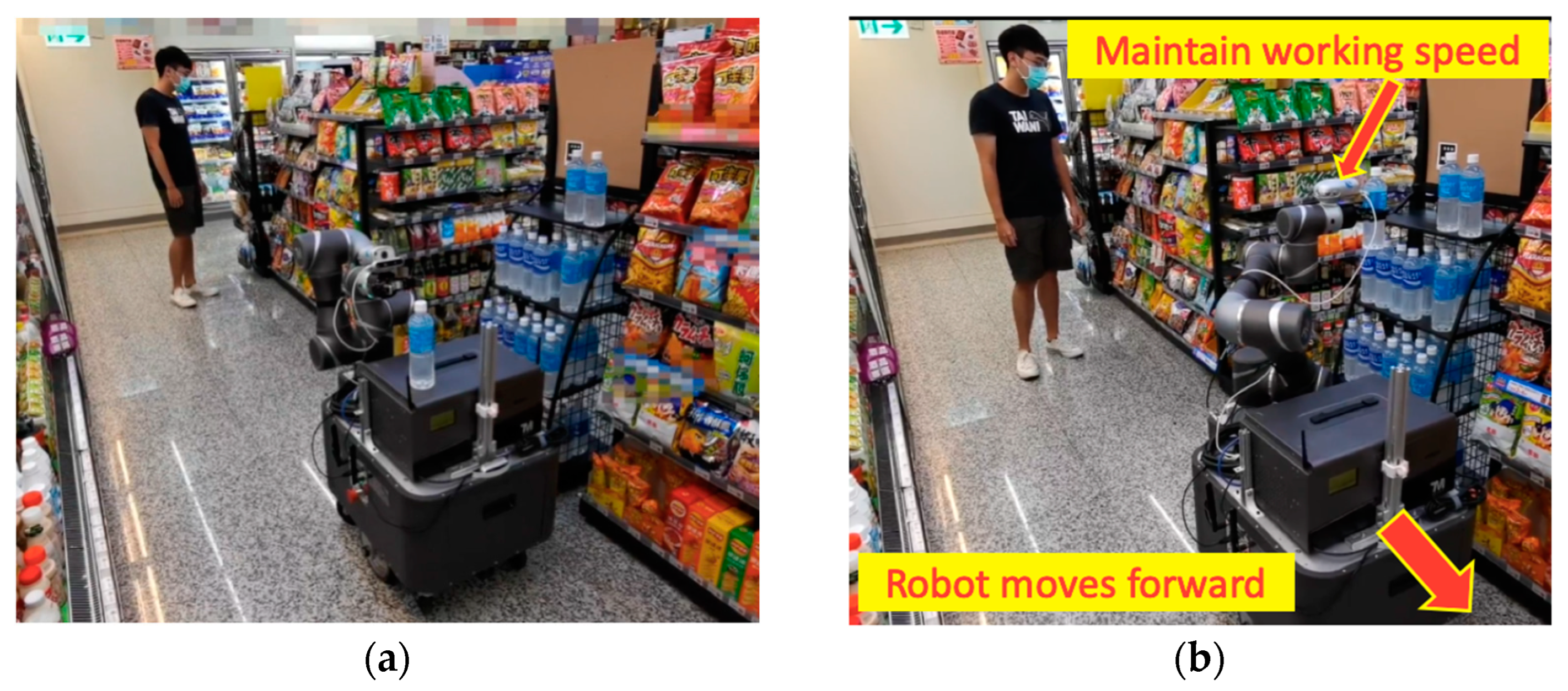
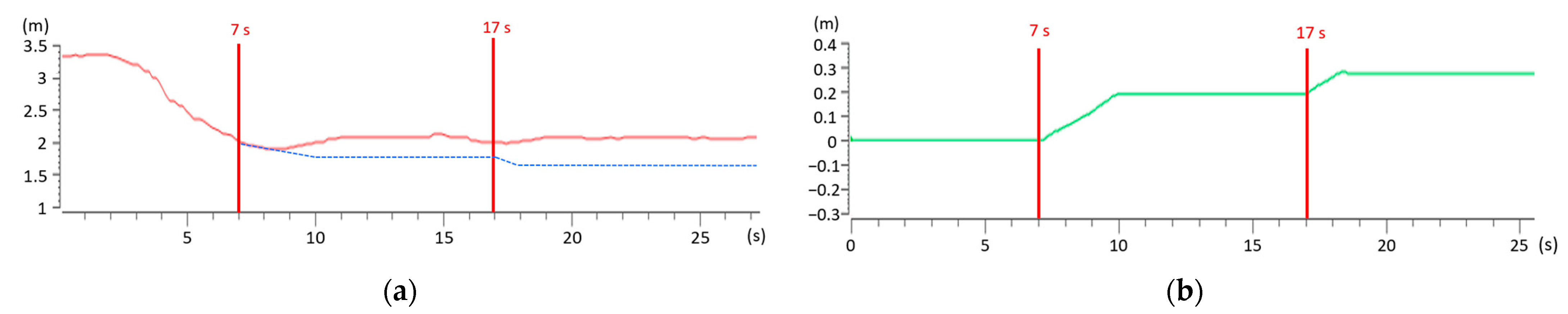
- Novel replenishment and control strategies are developed for coordinating the movement of the entire mobile robot manipulator to achieve higher working efficiency under the strict constraint of customer safety.
- Via integration with the developed task planner that can determine a proper order for replenishment and the sensor-fusion method that leads to the required accuracy in both position and orientation, the proposed system is capable of conducting a field study at a convenience store.
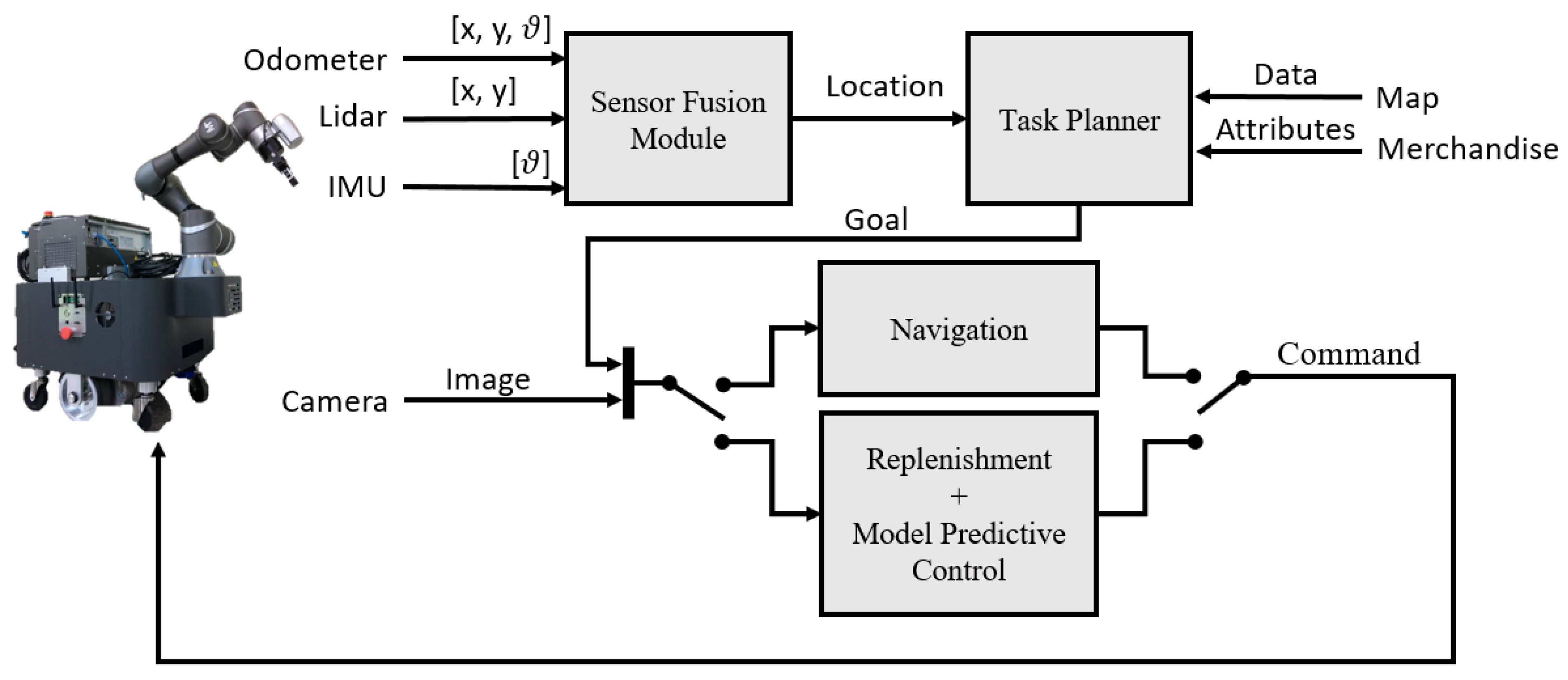
2. Proposed System
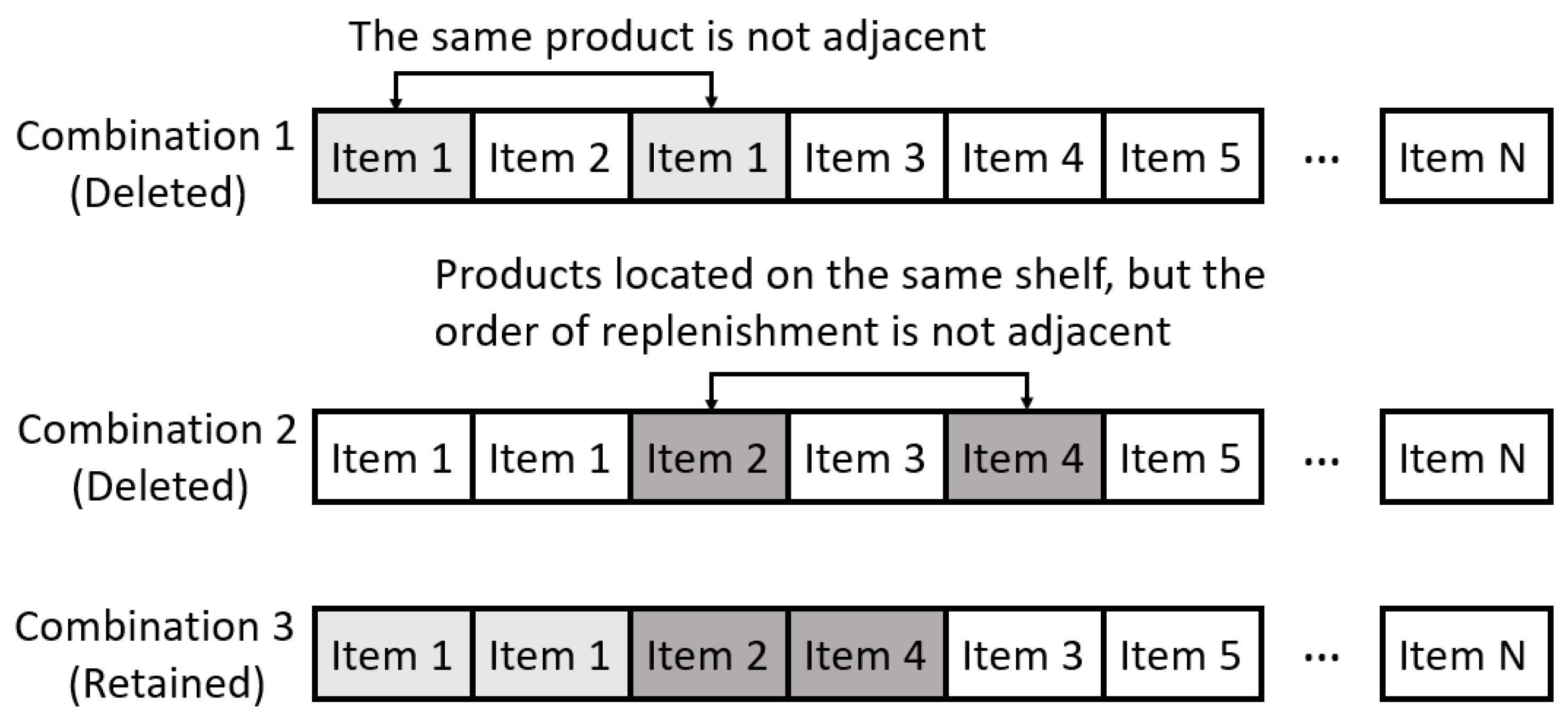
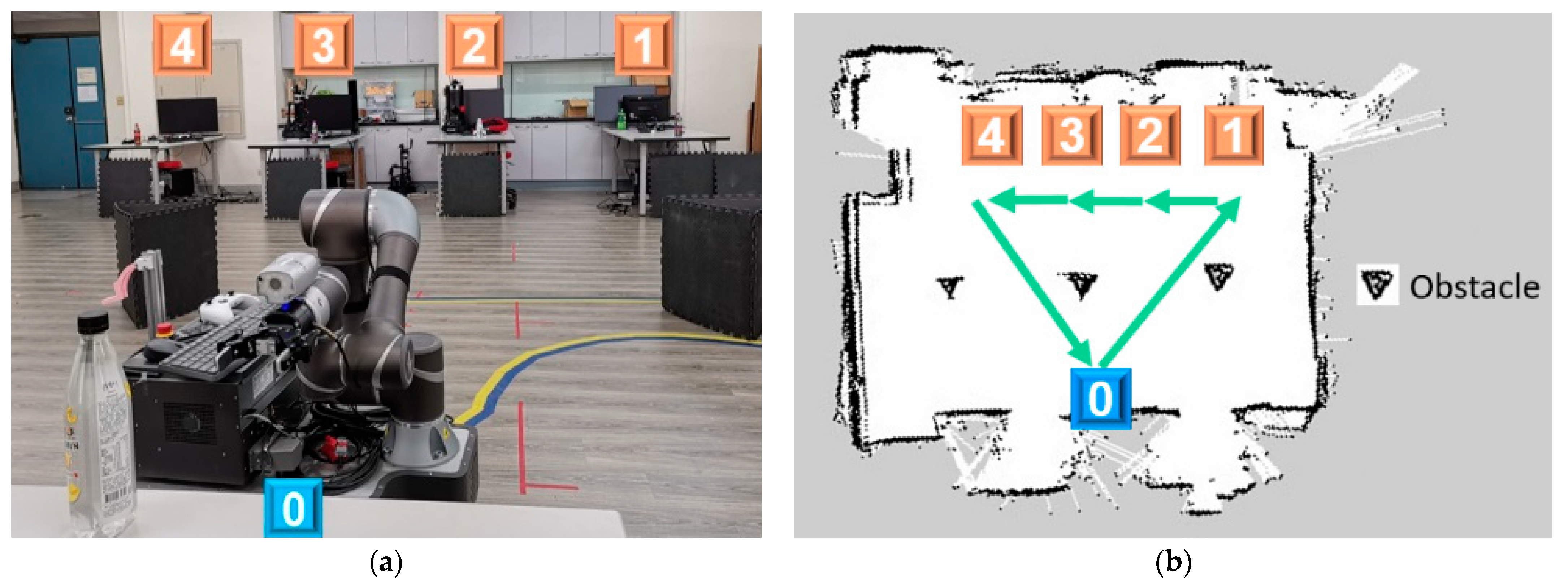
2.1. Task Planning
- Step 1:
- Send out the robot for patrol and record the information of the missing goods into a database.
- Step 2:
- Among all N permutations of the goods, retain those conforming to the two rules.
- Step 3:
- From the remaining combinations, apply the A* algorithm to find the combination that results in the shortest path.
- Step 4:
- Output that combination as the goal for path planning.
2.2. Navigation and Replenishment
2.2.1. Navigation
2.2.2. Replenishment
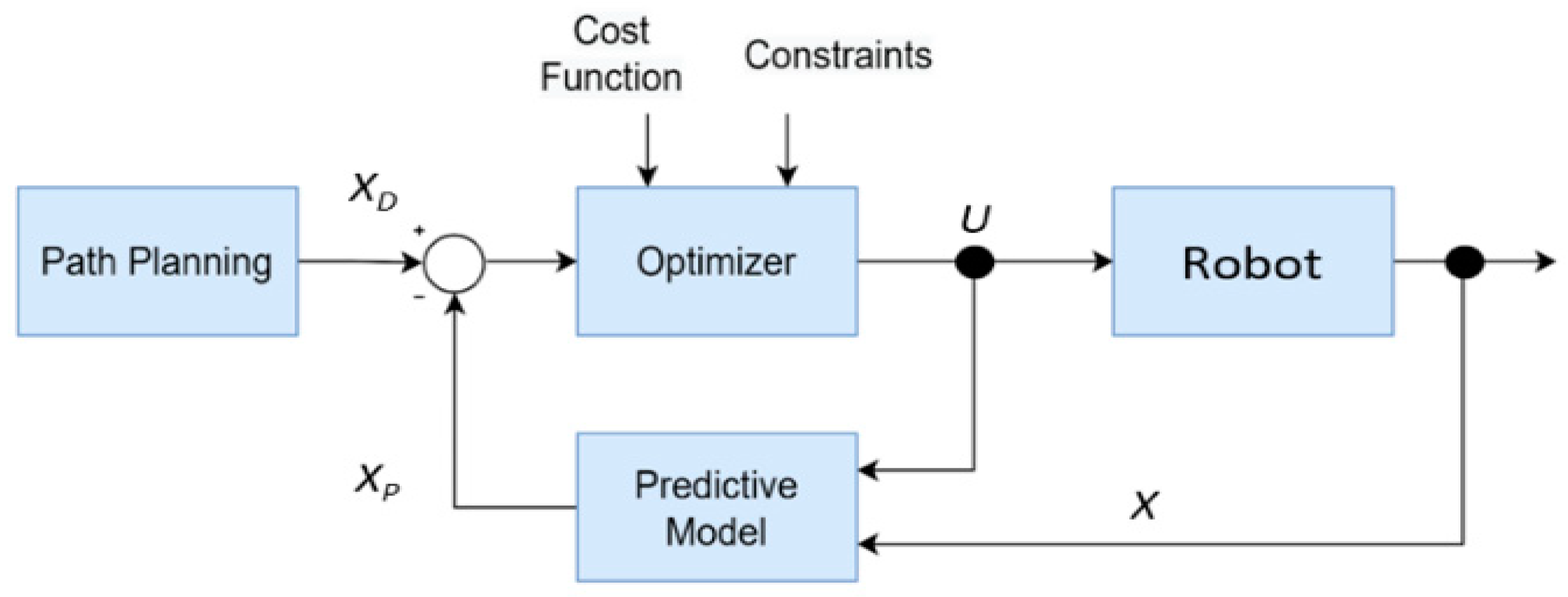
2.3. Model Predictive Control
2.4. Sensor Fusion
When the MS for the position (orientation) is smaller (larger) than the chosen threshold value for position (orientation), the measurement from the LiDAR (IMU) is used for the next prediction, otherwise, it will be ignored.
3. Experiments
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Che, H.; Chen, X.; Chen, Y. Investigating effects of out-of-stock on consumer stockkeeping unit choice. J. Mark. Res. 2012, 49, 502–513. [Google Scholar] [CrossRef]
- Wada, K. New robot technology challenge for convenience store. In Proceedings of the 2017 IEEE/SICE International Symposium on System Integration (SII), Taipei, Taiwan, 11–14 December 2017; pp. 1086–1091. [Google Scholar]
- Zhang, X.; Lu, H.; Xu, Q.; Peng, X.; Li, Y.; Liu, L.; Dai, Z.; Zhang, W. Image recognition of supermarket shopping robot based on CNN. In Proceedings of the 2020 IEEE International Conference on Artificial Intelligence and Computer Applications (ICAICA), Dalian, China, 27–29 June 2020; pp. 1363–1368. [Google Scholar]
- Gross, H.-M.; Boehme, H.; Schroeter, C.; Müller, S.; König, A.; Einhorn, E.; Martin, C.; Merten, M.; Bley, A. TOOMAS: Interactive shopping guide robots in everyday use—Final implementation and experiences from long-term field trials. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009; pp. 2005–2012. [Google Scholar]
- Yedla, S.K.; Manikandan, V.; Panchami, V. Real-time Scene Change Detection with Object Detection for Automated Stock Verification. In Proceedings of the 2020 5th International Conference on Devices, Circuits and Systems (ICDCS), Coimbatore, India, 5–6 March 2020; pp. 157–161. [Google Scholar]
- Remote-Controlled Robot Staff Tested in Japanese Convenience Store. Available online: https://interestingengineering.com/culture/remote-controlled-robot-staff-tested-in-japanese-convenience-store (accessed on 18 March 2023).
- Simbe Robotics Brings Tally to Streamline Decathlon’s Store Experience. Available online: https://www.decathlon.com/blogs/inside-decathlon/simbes-robotic-tally-decathlon (accessed on 18 March 2023).
- Lewandowski, B.; Wengefeld, T.; Müller, S.; Jenny, M.; Glende, S.; Schröter, C.; Bley, A.; Gross, H.-M. Socially compliant human-robot interaction for autonomous scanning tasks in supermarket environments. In Proceedings of the 2020 29th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), Naples, Italy, 31 August–4 September 2020; pp. 363–370. [Google Scholar]
- Zhang, Y.; Xiao, Z.; Yang, J.; Wraith, K.; Mosca, P. A hybrid solution for smart supermarkets based on actuator networks. In Proceedings of the 2019 7th International Conference on Information, Communication and Networks (ICICN), Macao, China, 24–26 April 2019; pp. 82–86. [Google Scholar]
- Hu, W.; Qiu, J.; Zhang, F.; Yang, Q.; Wang, P.; Geng, C. Control and Fetching Strategy of Goods-Picking Robot in the Self-service Supermarket. In Proceedings of the 2019 IEEE 9th Annual International Conference on CYBER Technology in Automation, Control, and Intelligent Systems (CYBER), Suzhou, China, 29 July–2 August 2019; pp. 1285–1288. [Google Scholar]
- Fox, D.; Burgard, W.; Thrun, S. The dynamic window approach to collision avoidance. IEEE Robot. Autom. Mag. 1997, 4, 23–33. [Google Scholar] [CrossRef]
- Everett, M.; Chen, Y.F.; How, J.P. Motion planning among dynamic, decision-making agents with deep reinforcement learning. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 3052–3059. [Google Scholar]
- Li, W.; Yue, M.; Shangguan, J.; Jin, Y. Navigation of Mobile Robots Based on Deep Reinforcement Learning: Reward Function Optimization and Knowledge Transfer. Int. J. Control Autom. Syst. 2023, 21, 563–574. [Google Scholar] [CrossRef]
- Liao, B.; Hua, Y.; Wan, F.; Zhu, S.; Zong, Y.; Qing, X. Stack-RRT*: A Random Tree Expansion Algorithm for Smooth Path Planning. Int. J. Control Autom. Syst. 2023, 21, 993–1004. [Google Scholar] [CrossRef]
- Ferrer, G.; Sanfeliu, A. Proactive kinodynamic planning using the extended social force model and human motion prediction in urban environments. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 1730–1735. [Google Scholar]
- Weinrich, C.; Volkhardt, M.; Einhorn, E.; Gross, H.-M. Prediction of human collision avoidance behavior by lifelong learning for socially compliant robot navigation. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 376–381. [Google Scholar]
- Chen, C.; Liu, Y.; Kreiss, S.; Alahi, A. Crowd-robot interaction: Crowd-aware robot navigation with attention-based deep reinforcement learning. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 6015–6022. [Google Scholar]
- Kruse, T.; Pandey, A.K.; Alami, R.; Kirsch, A. Human-aware robot navigation: A survey. Robot. Auton. Syst. 2013, 61, 1726–1743. [Google Scholar] [CrossRef]
- Patompak, P.; Jeong, S.; Chong, N.Y.; Nilkhamhang, I. Mobile robot navigation for human-robot social interaction. In Proceedings of the 2016 16th International Conference on Control, Automation and Systems (ICCAS), Gyeongju, Republic of Korea, 16–19 October 2016; pp. 1298–1303. [Google Scholar]
- Magnanimo, V.; Walther, S.; Tecchia, L.; Natale, C.; Guhl, T. Safeguarding a mobile manipulator using dynamic safety fields. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Republic of Korea, 9–14 October 2016; pp. 2972–2977. [Google Scholar]
- Ide, S.; Takubo, T.; Ohara, K.; Mae, Y.; Arai, T. Real-time trajectory planning for mobile manipulator using model predictive control with constraints. In Proceedings of the 2011 8th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Incheon, Republic of Korea, 23–26 November 2011; pp. 244–249. [Google Scholar]
- Stellato, B.; Banjac, G.; Goulart, P.; Bemporad, A.; Boyd, S. OSQP: An operator splitting solver for quadratic programs. Math. Program. Comput. 2020, 12, 637–672. [Google Scholar] [CrossRef]
- Van Der Merwe, R.; Wan, E.; Julier, S. Sigma-point Kalman filters for nonlinear estimation and sensor-fusion: Applications to integrated navigation. In Proceedings of the Aiaa Guidance, Navigation, and Control Conference and Exhibit, Providence, RI, USA, 16–19 August 2004; p. 5120. [Google Scholar]
- De Maesschalck, R.; Jouan-Rimbaud, D.; Massart, D.L. The mahalanobis distance. Chemom. Intell. Lab. Syst. 2000, 50, 1–18. [Google Scholar] [CrossRef]
- Chung, M.-A.; Lin, C.-W. An improved localization of mobile robotic system based on AMCL algorithm. IEEE Sens. J. 2021, 22, 900–908. [Google Scholar] [CrossRef]
- Harithas, S.S.; Pardia, B. Gennav: A generic indoor navigation system for mobile robots. In Proceedings of the 2020 Fourth International Conference on I-SMAC (IoT in Social, Mobile, Analytics and Cloud) (I-SMAC), Palladam, India, 7–9 October 2020; pp. 182–187. [Google Scholar]
- Dong, T.; Zhang, Y.; Li, M.; Bai, Y. Point Cloud Repair Method via Convex Set Theory. Appl. Sci. 2023, 13, 1830. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Lap | Shelf 0 | Shelf 1 | Shelf 2 | Shelf 3 | Shelf 4 | Average | Deviation |
|---|---|---|---|---|---|---|---|
| 1 | 0.57 | −0.57 | 0.89 | −3.60 | 2.09 | −0.12 | 2.16 |
| 2 | −0.31 | 1.38 | −2.72 | −0.48 | −1.26 | −0.68 | 1.49 |
| 3 | −0.32 | 0.98 | −0.19 | −1.96 | −2.03 | −0.71 | 1.28 |
| 4 | 0.41 | −1.18 | −2.21 | −0.86 | −2.71 | −1.31 | 1.22 |
| 5 | 0.26 | 2.59 | 3.51 | −1.91 | 1.53 | 1.19 | 2.12 |
| Lap | Shelf 0 | Shelf 1 | Shelf 2 | Shelf 3 | Shelf 4 | Average | Deviation |
|---|---|---|---|---|---|---|---|
| 1 | 0.07 | −0.08 | 0.33 | −0.08 | −0.08 | 0.03 | 0.18 |
| 2 | −0.17 | 0.13 | −0.14 | 0.14 | −0.09 | −0.02 | 0.15 |
| 3 | −0.14 | −0.02 | −0.43 | 0.09 | −0.31 | −0.16 | 0.21 |
| 4 | 0.01 | −0.12 | −0.31 | 0.20 | 0.15 | −0.01 | 0.21 |
| 5 | −0.03 | 0.09 | −0.54 | −0.04 | 0.03 | −0.10 | 0.25 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Su, C.-Y.; Wang, H.-C.; Ko, C.-H.; Young, K.-Y. Development of an Autonomous Robot Replenishment System for Convenience Stores. Electronics 2023, 12, 1940. https://doi.org/10.3390/electronics12081940
Su C-Y, Wang H-C, Ko C-H, Young K-Y. Development of an Autonomous Robot Replenishment System for Convenience Stores. Electronics. 2023; 12(8):1940. https://doi.org/10.3390/electronics12081940
Chicago/Turabian StyleSu, Chien-Yu, Hsueh-Cheng Wang, Chun-Hsu Ko, and Kuu-Young Young. 2023. "Development of an Autonomous Robot Replenishment System for Convenience Stores" Electronics 12, no. 8: 1940. https://doi.org/10.3390/electronics12081940