



Piecewise Hybrid System with Cross-Correlation Spectral Kurtosis for Fault Diagnosis in Rolling Bearing of Wind Power Generator

Abstract
:1. Introduction
2. Formulation Analysis
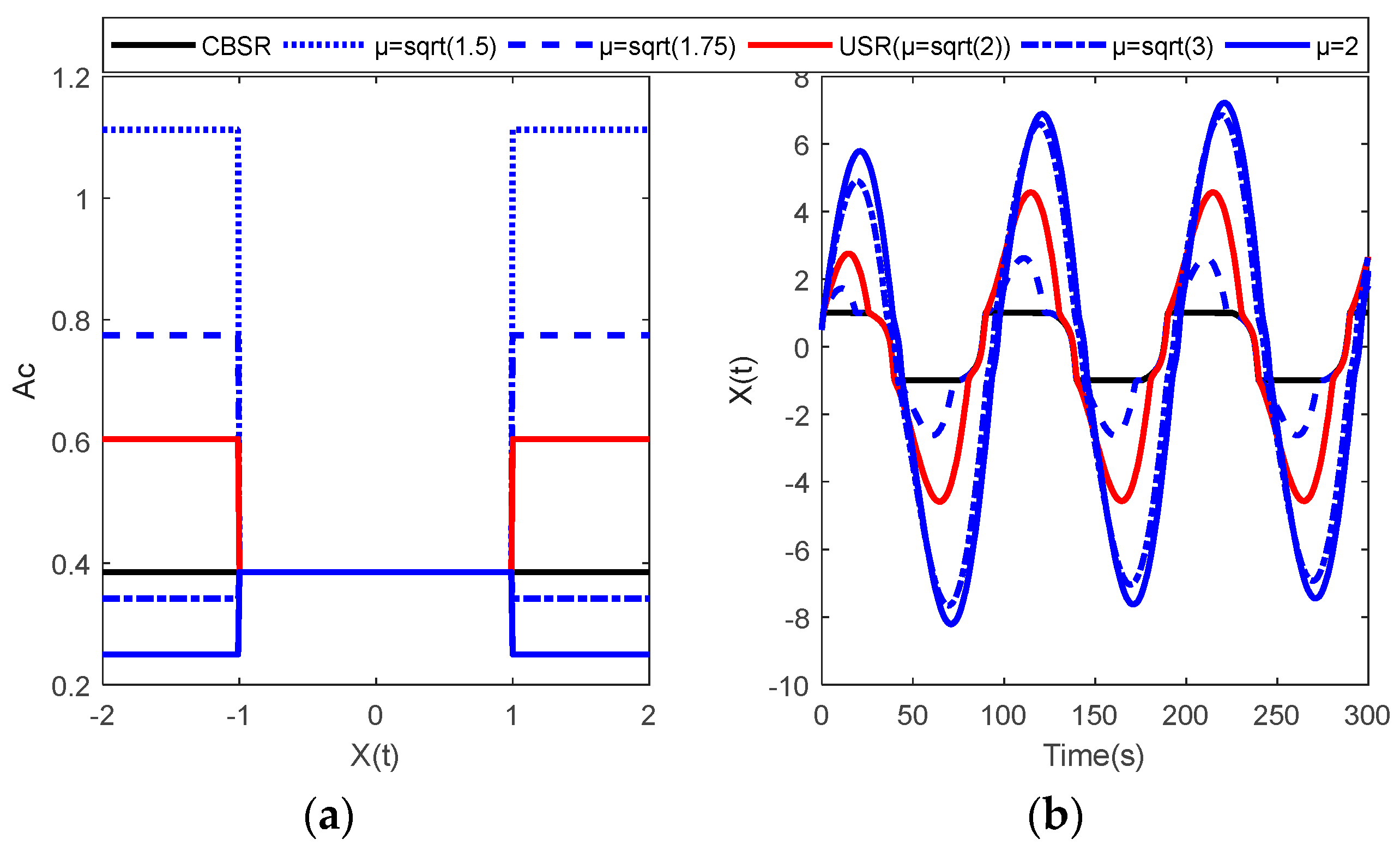
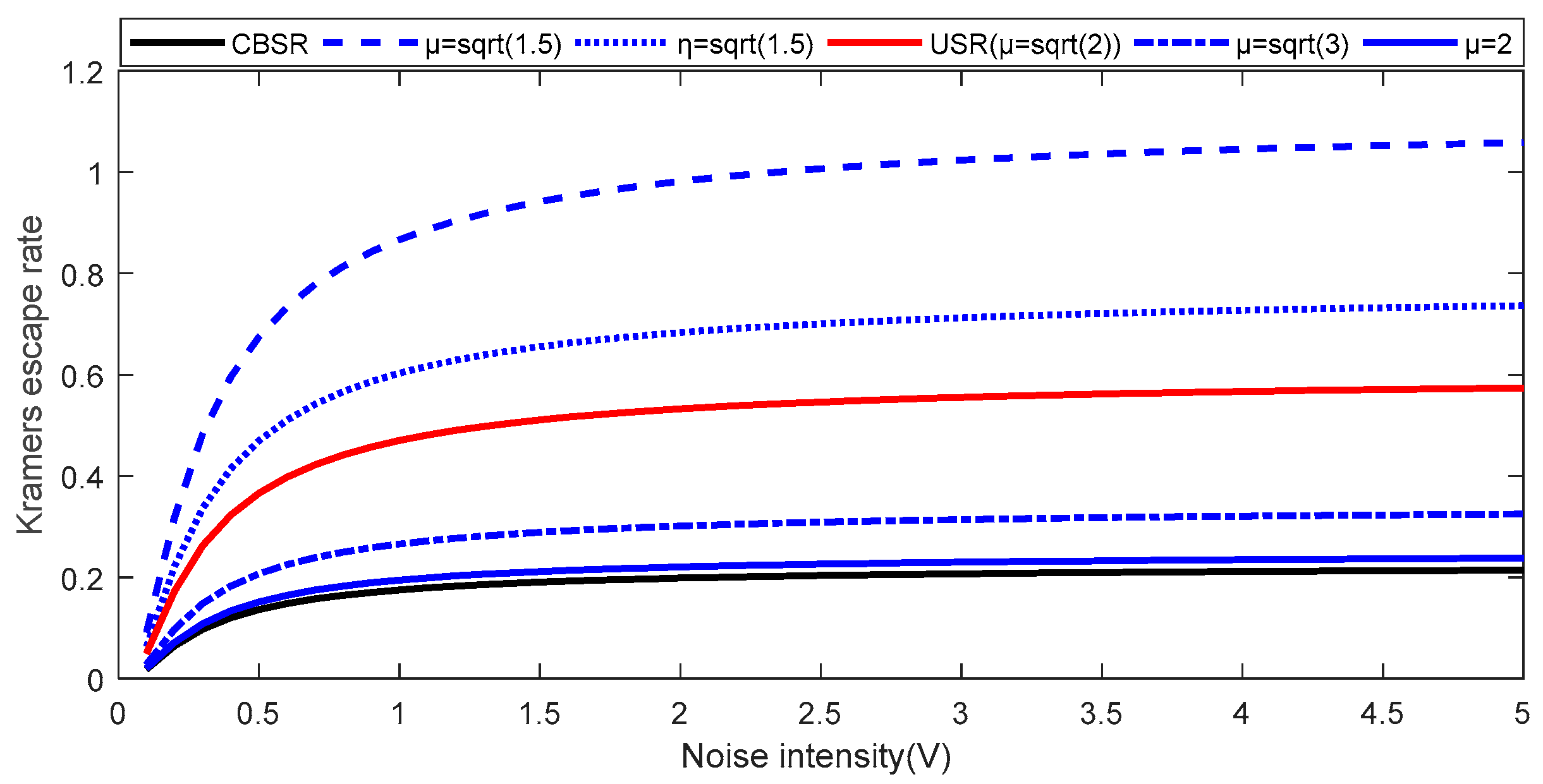
2.1. Adaptive Piecewise Hybrid Stochastic Resonance Model
2.2. Novel Evaluation Function of Cross-Correlated Spectrum Kurtosis
2.3. Proposed CSK-Base APHSR system
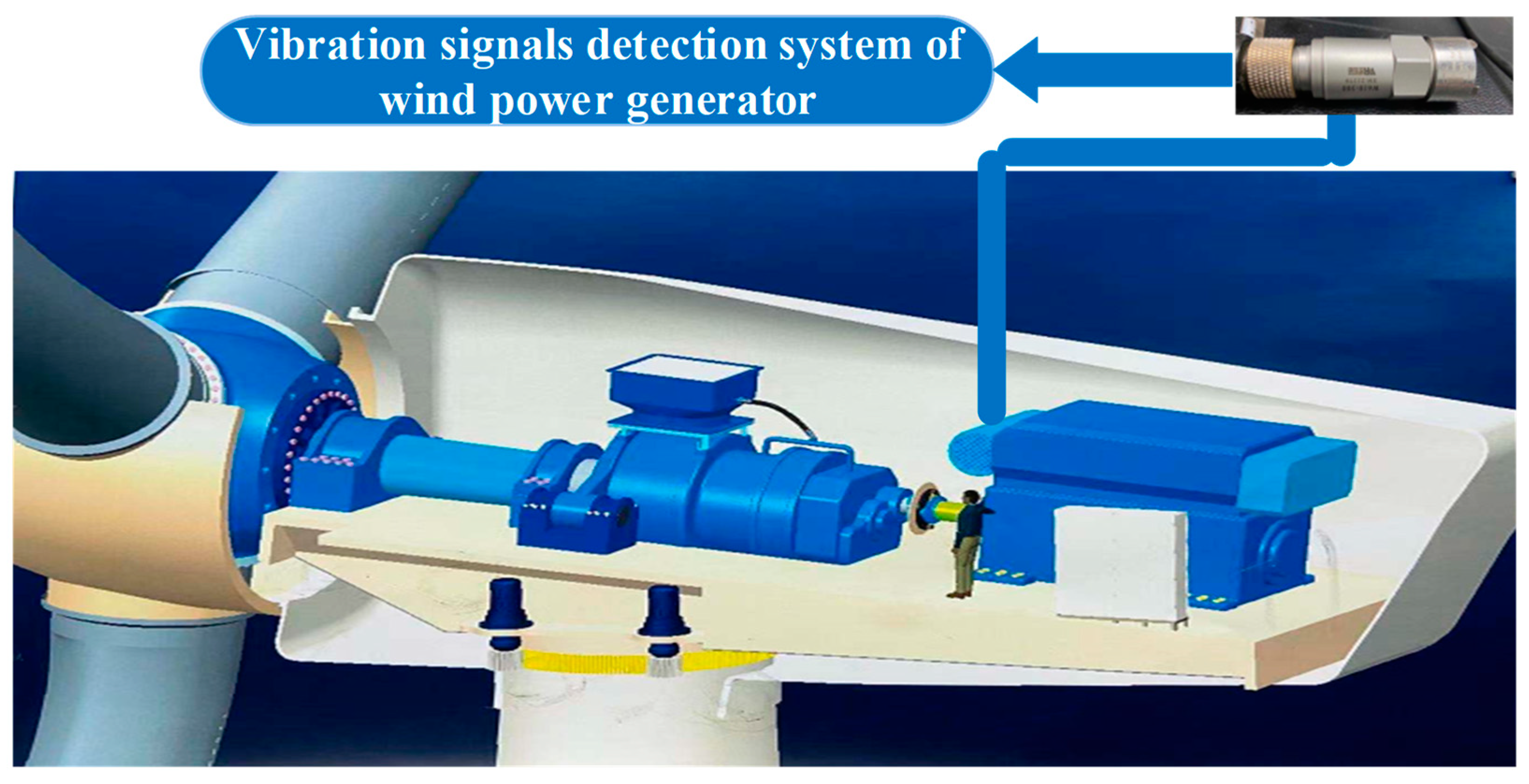
- Pre-processing of signals: the empirical mode decomposition method was used for the vibration signals obtained from wind power generators to obtain intrinsic mode functions. The energy density and the correlation coefficient methods were used to reduce high- and low-frequency noises, respectively [39]. Therefore, a filtered signal could be acquired when the remaining components were reconstructed.
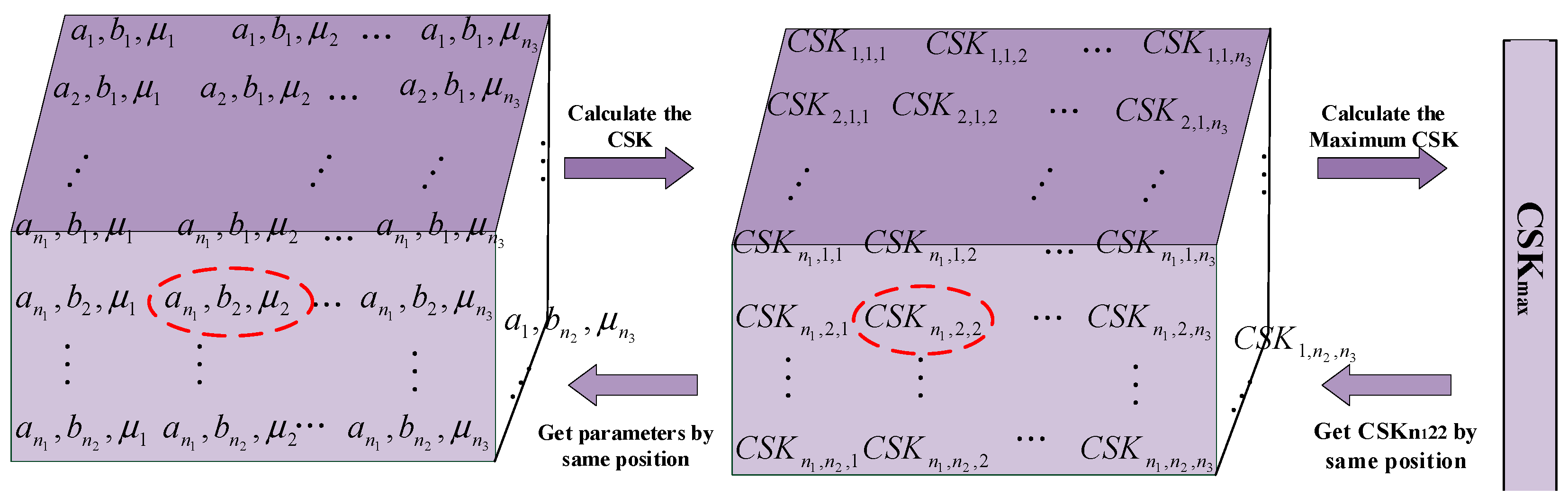
- Determination of the optimal parameters: the scopes of parameters a, b, and µ were set as (0, 20], (0, 20], and (0, 1)∪(1, 3), respectively, and CSK was calculated as the parameters varied. Thereafter, the three-dimensional reverse positioning method was used for obtaining the optimal parameters of the APHSR method from the corresponding position.
- Extraction of fault feature: with the optimal condition of the APHSR theory, the fault characteristics of vibration signals under heavy background noise were effectively detected. Furthermore, machine learning based on a medium tree was adopted to verify the outstanding ability of the CSK-based APHSR method on intelligent feature frequency detection.
3. Engineering Applications
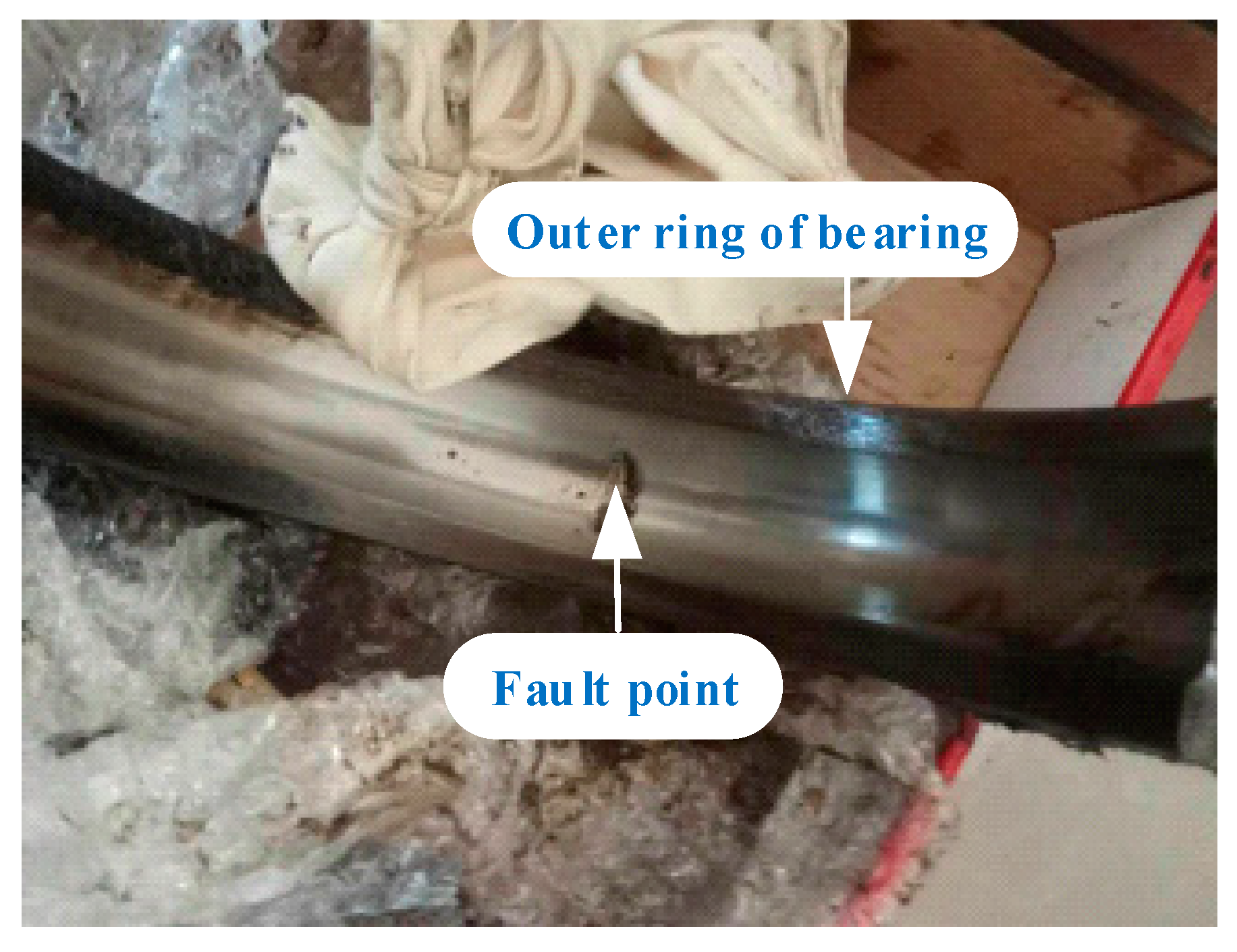
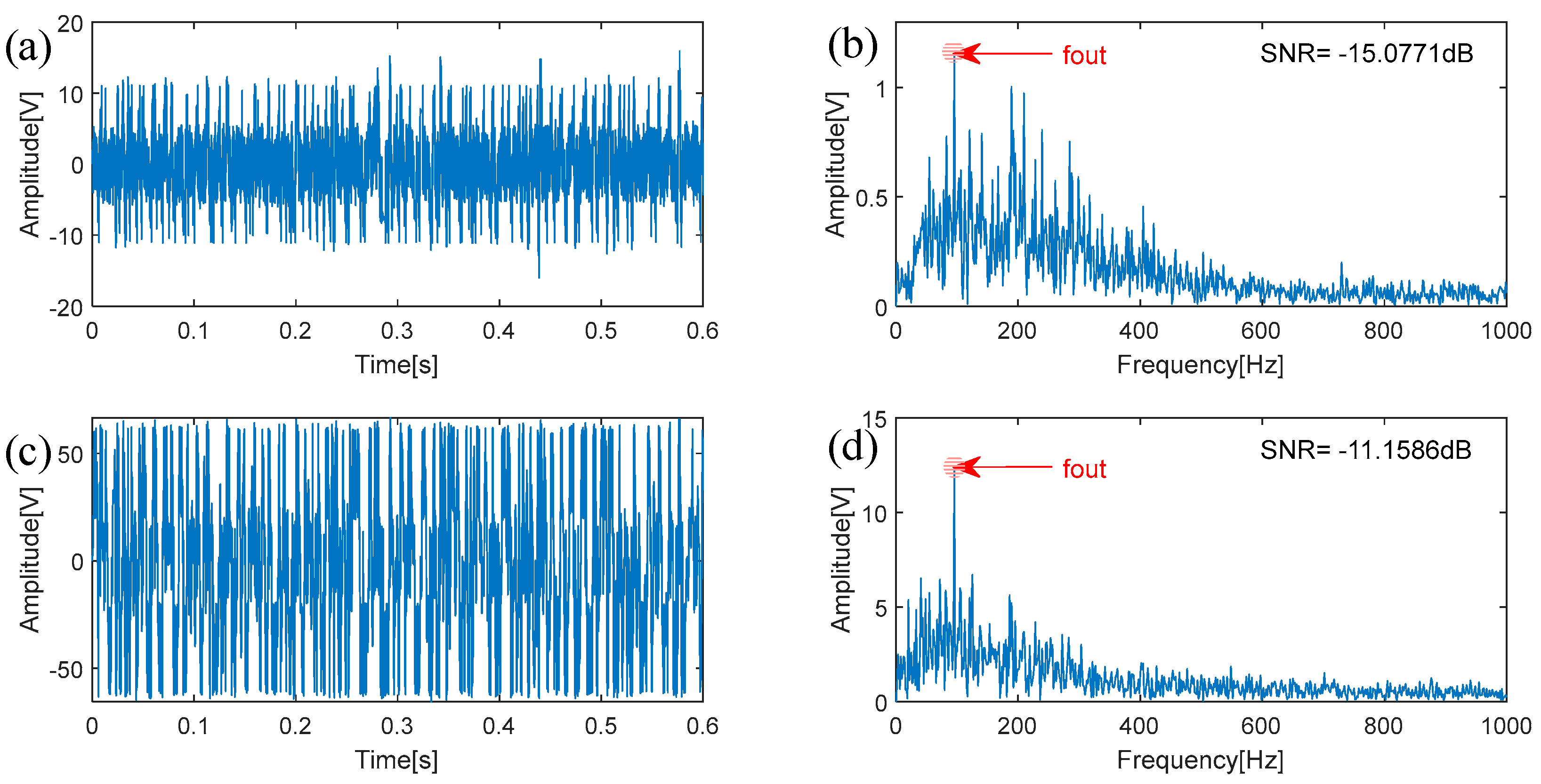
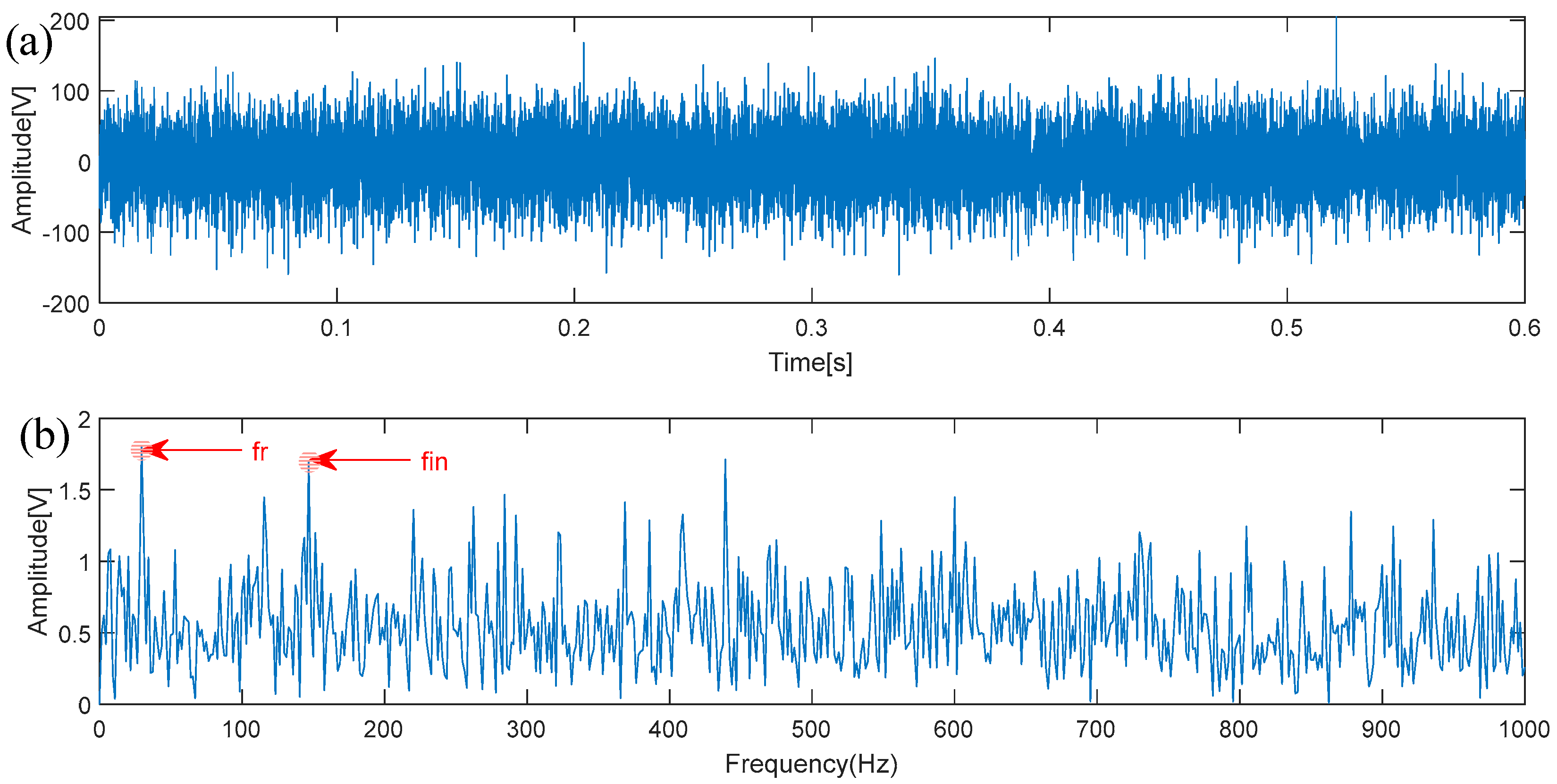
3.1. Outer Ring Fault of Bearing
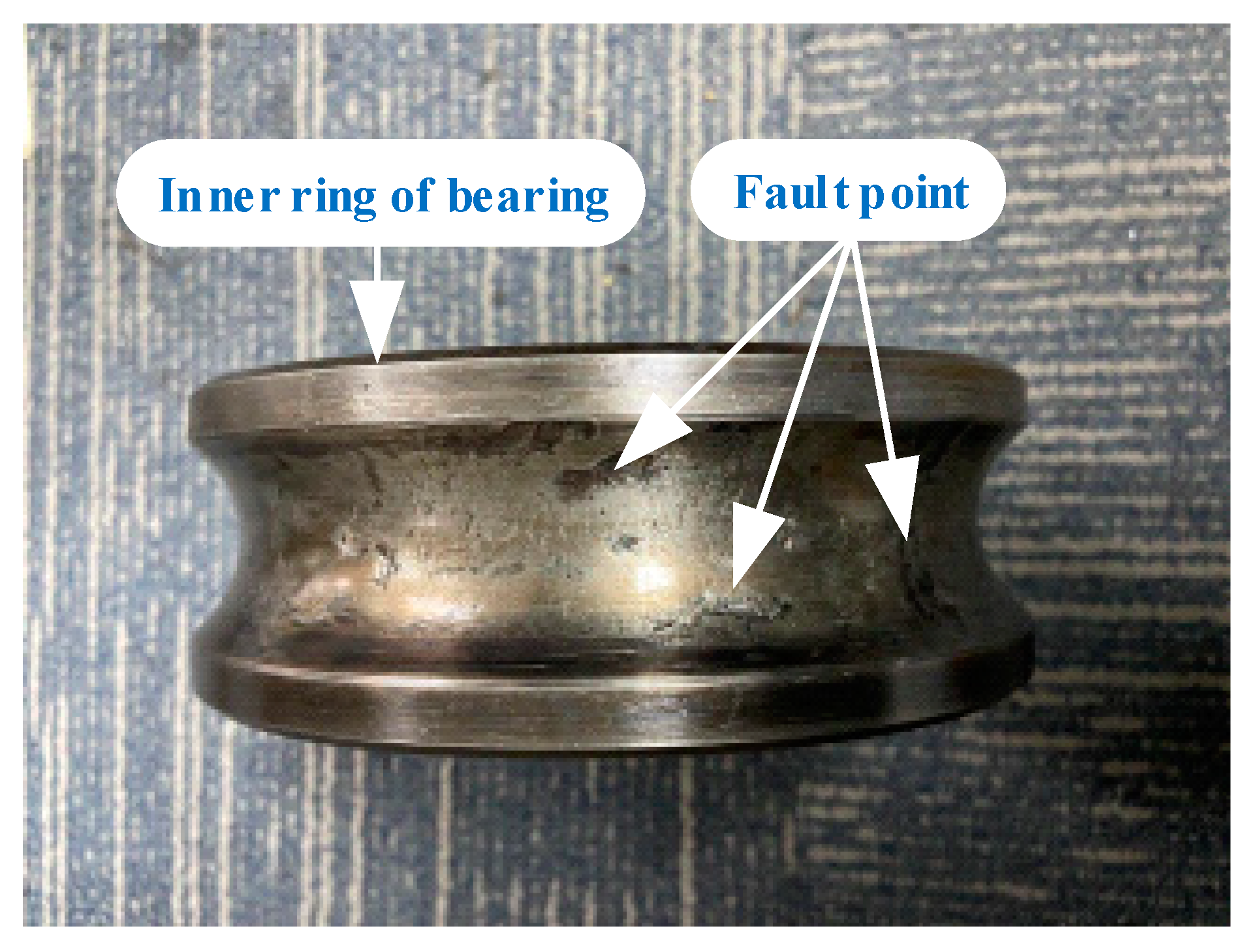
3.2. Inner Ring Fault of Bearing
4. Conclusions
- The APHSR method with the novel CSK index exhibited an excellent capability of bearing fault extraction. In the proposed method, a novel CSK was designed based on the advantages of the kurtosis function and cross-correlation function to quantitatively evaluate the detection ability of the bearing fault system under the background of complex noise in the frequency domain. The vibration signal was an incipient signal that was related to the fault feature.
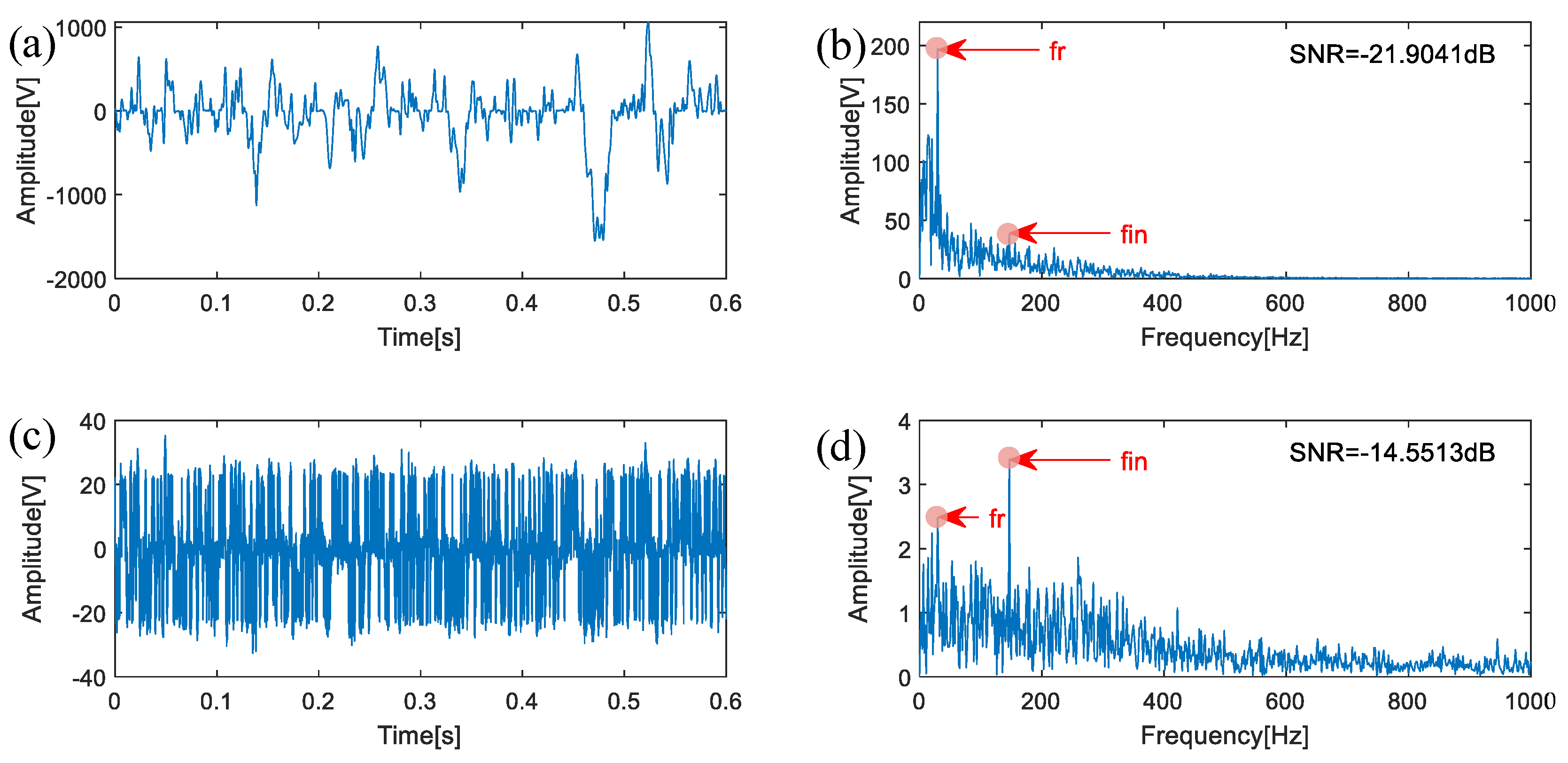
- The proposed method presented an outstanding capability to detect the bearing fault frequency of a wind power generator. It was easier to recognize the feature frequency of the bearing fault after the proposed method. The SNR value of the output outer ring and inner ring signals of the proposed CSK-based APHSR method increased by 3.9185 dB and 7.3528 dB when compared with the CSKMCCK-based USR method. The results demonstrated the outstanding performance of the CSK-based APHSR method to extract the fault features of bearings embedded in complex noise.
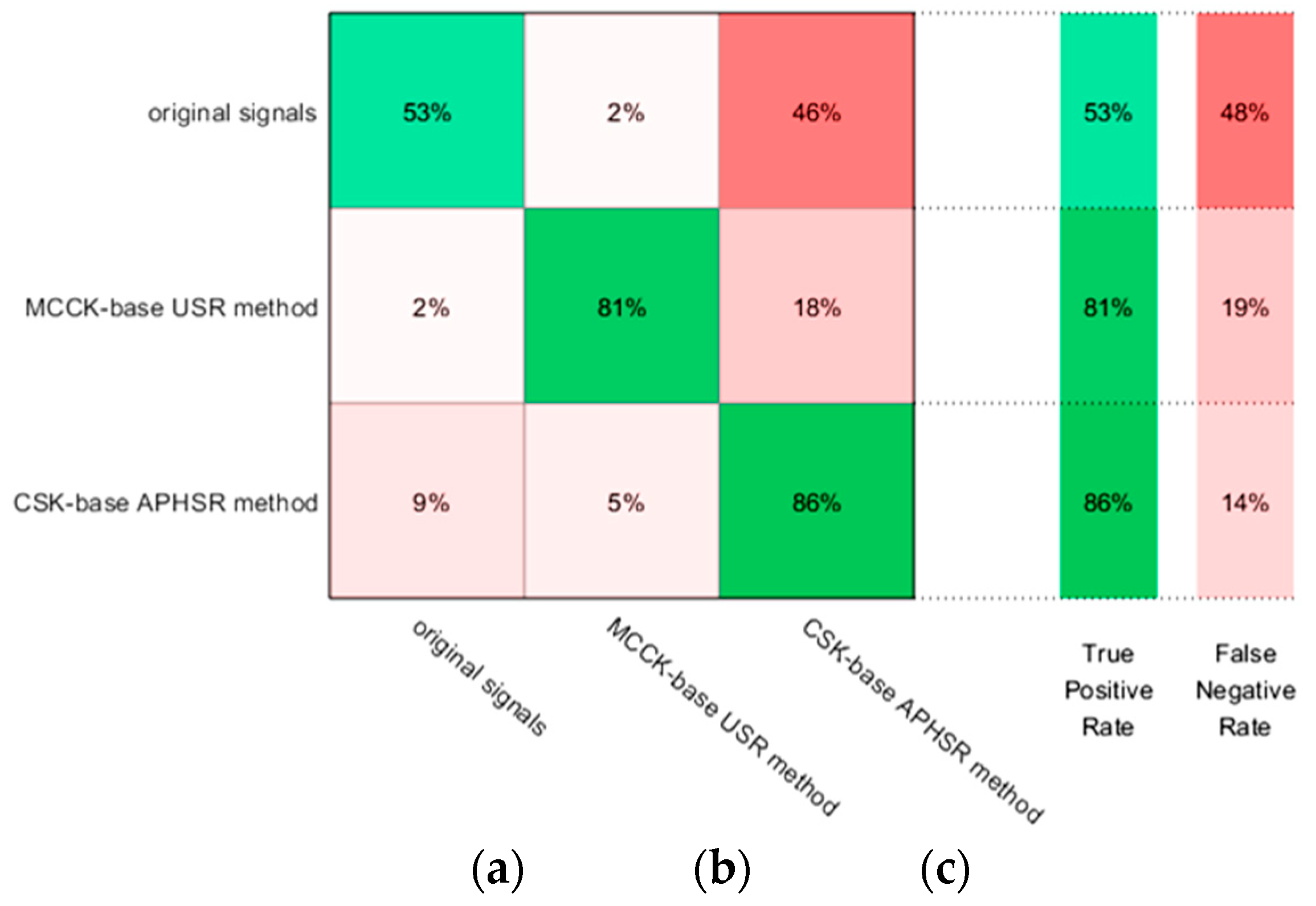
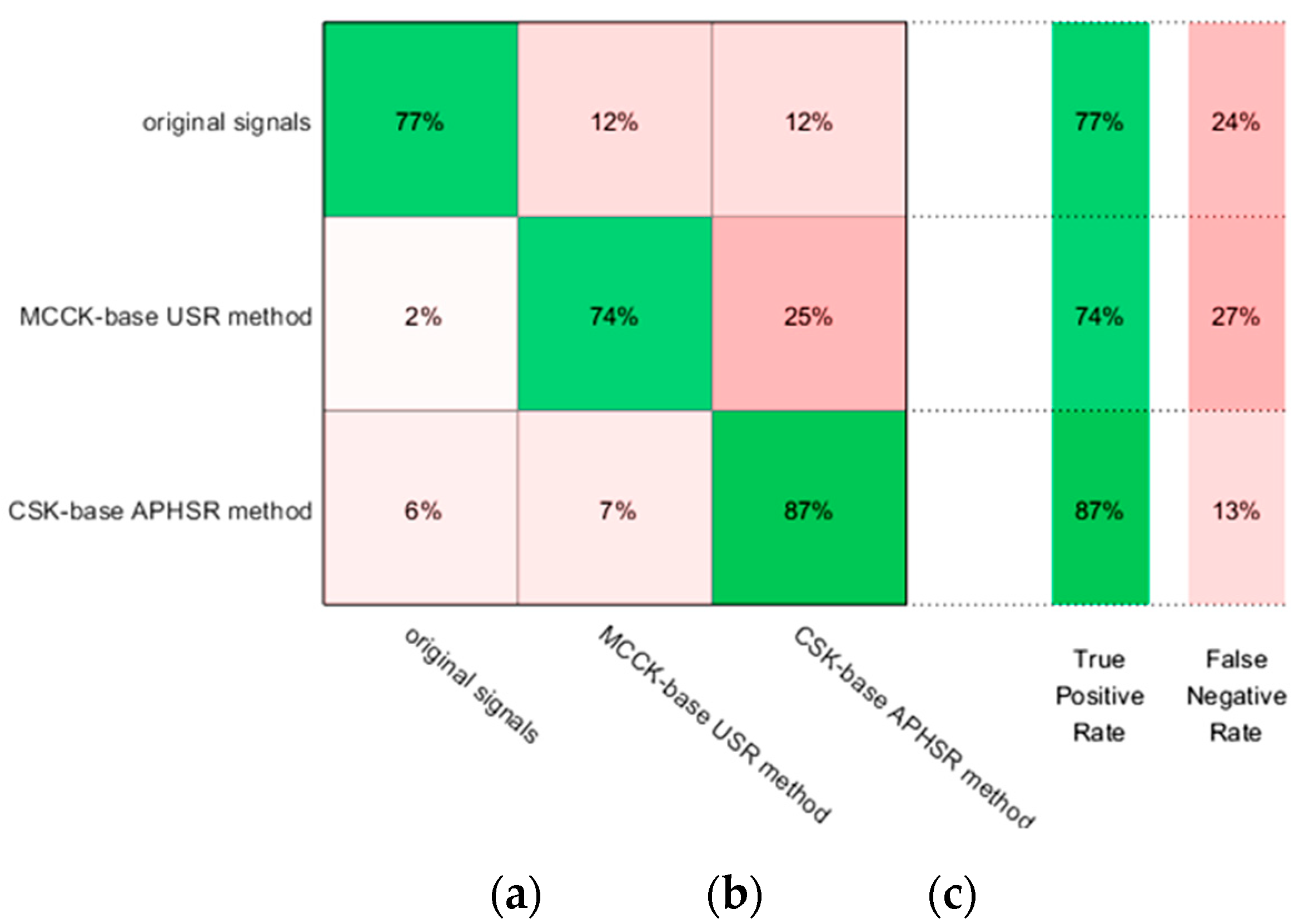
- Further research was conducted with machine learning based on the medium tree method to reveal the superiority of the APHSR method based on CSK. The recognition rate of the bearing outer ring processed by the CSK-based APHSR method increased by 33% and 5% when compared with the original signals and the CSKMCCK-based USR method. The recognition rate of the bearing inner ring processed by the CSK-based APHSR method increased by 10% and 13% when compared with the original signals and the CSKMCCK-based USR method. The proposed method could more effectively enhance the performance of bearing fault feature extraction when the wind turbines worked in harsh environments.
- As the computational cost is of great significant for the processing of bearing fault diagnosis, it will be studied as an important index to improve the ability of fault detection in the future.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Alanazi, A.; Alanaz, M.; Nowdeh, S.A.; Abdelaziz, A.Y.; Siada, A. Stochastic-metaheuristic model for multi-criteria allocation of wind energy resources in distribution network using improved equilibrium optimization algorithm. Electronics 2022, 11, 3285. [Google Scholar] [CrossRef]
- Torsvik, J.; Nejad, A.; Pedersen, E. Experimental field study of floater motion effects on a main bearing in a full-scale spar floating wind turbine. Mar. Struct. 2021, 79, 103059. [Google Scholar] [CrossRef]
- Yoo, D.; Kang, S.; Jang, G.; Jung, S. Development of reactive power allocation method for radial structure wind farm considering multiple connections. Electronics 2022, 11, 2176. [Google Scholar] [CrossRef]
- Xu, X.; Hu, S.; Shi, P.; Shao, H.; Li, R.; Li, Z. Natural phase space reconstruction-based broad learning system for short-term wind speed prediction: Case studies of an offshore wind farm. Energy 2023, 262, 125342. [Google Scholar] [CrossRef]
- Esmaeili Shayan, M.; Najafi, G.; Ghobadian, B.; Gorjian, S.; Mamat, R.; Fairusham Ghazali, M. Multi-microgrid optimization and energy management under boost voltage converter with Markov prediction chain and dynamic decision algorithm. Renew. Energy 2022, 201, 179–189. [Google Scholar] [CrossRef]
- Esmaeili Shayan, M.; Najafi, G.; Lorenzini, G. Phase change material mixed with chloride salt graphite foam infiltration for latent heat storage applications at higher temperatures and pressures. Int. J. Energy Environ. Eng. 2022, 13, 739–749. [Google Scholar] [CrossRef]
- Loren, K.; Christopher, O. Health effects and wind turbines: A review of the literature. Environ. Health 2011, 78, 78. [Google Scholar]
- Sa, J.W. Technical analysis of condition monitoring and fault diagnosis for wind turbines. Water Resour. Electr. Pow. Constr. 2021, 7, 177–178. [Google Scholar]
- Xue, X.; Sang, S.; Huang, J. Flexible frequency response strategy with smooth rotor speed recovery of a DFIG-Based wind turbine. Electronics 2023, 12, 794. [Google Scholar] [CrossRef]
- Johnson, K.; Fleming, P. Development, implementation, and testing of fault detection strategies on the national wind technology Center’s controls advanced research turbines. Mechatronics 2010, 21, 728–736. [Google Scholar] [CrossRef]
- Esmaeili Shayan, M.; Najafi, G.; Ghobadian, B.; Gorjian, S.; Mazlan, M.; Samami, M. Flexible Photovoltaic System on Non-Conventional Surfaces: A Techno-Economic Analysis. Sustainability 2022, 14, 3566. [Google Scholar] [CrossRef]
- Cui, L.; Yang, J.; Wang, L.; Liu, H. Adaptive unsaturated bistable stochastic resonance multi-frequency signals detection based on preprocessing. Electronics 2021, 10, 2055. [Google Scholar] [CrossRef]
- Benzi, R.; Sutera, A.; Vulpiani, A. The mechanism of stochastic resonance. J. Phys. A 1981, 14, L453–L457. [Google Scholar] [CrossRef]
- Huang, W.; Zhang, G.; Jiao, S.; Wang, J. Bearing fault diagnosis based on stochastic resonance and improved whale optimization algorithm. Electronics 2022, 11, 2185. [Google Scholar] [CrossRef]
- Herp, J.; Ramezani, M.H.; Andersen, M.; Niels, S.; Esmaeil, S. Bayesian state prediction of wind turbine bearing failure. Renew. Energ. 2018, 116, 164–172. [Google Scholar] [CrossRef] [Green Version]
- Shi, P.; An, S.; Li, P.; Han, D. Signal feature extraction based on cascaded multi-stable stochastic resonance denoising and EMD method. Measurement 2016, 90, 318–328. [Google Scholar] [CrossRef]
- Xu, Z.; Mei, X.; Wang, X.; Yue, M.; Jin, J.; Yang, Y.; Li, C. Fault diagnosis of wind turbine bearing using a multi-scale convolutional neural network with bidirectional long short term memory and weighted majority voting for multi-sensors. Renew. Energy 2022, 183, 615–626. [Google Scholar] [CrossRef]
- Wang, S.; Niu, P.; Qiao, Z.; Guo, Y.; Wang, F.; Xu, C.; Han, S.; Wang, Y. Maximum cross-correlated kurtosis based unsaturated stochastic resonance and its application to bearing fault diagnosis. Chin. J. Phys. 2021, 72, 425–435. [Google Scholar] [CrossRef]
- Lu, S.; He, Q.; Hu, F.; Kong, F. Sequential multiscale noise tuning stochastic resonance for train bearing fault diagnosis in an embedded system. IEEE T. Instrum. Meas. 2014, 63, 106–116. [Google Scholar] [CrossRef]
- Li, J.; Li, M.; Zhang, J.; Jiang, G. Frequency-shift multiscale noise tuning stochastic resonance method for fault diagnosis of generator bearing in wind turbinehang. Measurement 2019, 133, 421–432. [Google Scholar] [CrossRef]
- Yang, G.; Xia, J.; Kong, Y.; Tang, H. Weak fault feature extraction of rolling bearing based on reconstructed TFSR. J. Mil. Transport. Acad. 2020, 22, 90–95. [Google Scholar]
- Li, Z.; Shi, B. A piecewise nonlinear stochastic resonance method and its application to incipient fault diagnosis of machinery. Chin. J. Phys. 2019, 59, 126–137. [Google Scholar] [CrossRef]
- Antoni, J. Fast computation of the kurtogram for the detection of transient faults. Mech. Syst. Signal Process. 2007, 21, 108–124. [Google Scholar] [CrossRef]
- Elforjani, M.; Shanbr, S.; Bechoefer, E. Detection of faulty high speed wind turbine bearing using signal intensity estimator technique. Wind Energy 2017, 21, 53–69. [Google Scholar] [CrossRef]
- Jing, Z.; Guo, L. Hydraulic pump vibration signal pretreatment based on adaptive stochastic resonance with a general correlation function. J. Vib. Shock 2016, 35, 607–613. [Google Scholar]
- Tao, Z.; Lu, C.; Zha, Z.; Lu, J.; Xiao, M. Multi-frequency periodic weak signal detection based on single-well potential stochastic resonance. J. Electr. Meas. Instr. 2014, 28, 72–85. [Google Scholar]
- Wang, S.; Niu, P.; Guo, Y.; Wang, F.; Li, W.; Shi, H.; Han, S. Early diagnosis of bearing faults based on decomposition and reconstruction stochastic resonance system. Measurement 2018, 158, 107709. [Google Scholar] [CrossRef]
- Lai, Z. Weak-Signal Detection Based on the Chaotic and Stochastic-Resonance Characteristic of Duffing Oscillator; Tianjin University: Tianjin, China, 2014. [Google Scholar]
- Qin, G.; Gong, D.; Hu, G.; Wen, X. An analog simulation of stochastic resonance. Acta Phys. Sin. 1992, 41, 360–369. [Google Scholar]
- Pascual, J.C.; Ordonez, J.G.; Morillo, M. Stochastic resonance: Theory and numerics. Chaos 2015, 15, 26115. [Google Scholar] [CrossRef]
- Gammaitoni, L.; Hanggi, P.; Jung, P. Stochastic resonance. Rev. Mod. Phys. 1998, 86, 223–287. [Google Scholar] [CrossRef]
- Qiao, Z.; Shu, X. Coupled neurons with multi-objective optimization benefit incipient fault identification of machinery. Chaos Soliton. Fract. 2021, 145, 110813. [Google Scholar] [CrossRef]
- Antoni, J. The spectral kurtosis: A useful tool for characterizing non-stationary signals. Mech. Syst. Signal Process. 2006, 20, 282–307. [Google Scholar] [CrossRef]
- Chen, X.; Zhang, B.; Feng, F.; Jiang, P. Optimal resonant band demodulation based on an improved correlated kurtosis and its application in bearing fault diagnosis. Sensor 2017, 17, 360. [Google Scholar] [CrossRef] [Green Version]
- Lv, S. Research on rotor fault feature extraction method based on correlation coefficient principle EMD. Mod. Manuf. Technol. Equipment. 2018, 6, 54–55. [Google Scholar]
- Antoni, J. The infogram: Entropic evidence of the signature of repetitive transients. Mech. Syst. Signal Process. 2016, 74, 73–94. [Google Scholar] [CrossRef]
- Ho, D.; Randall, R.B. Optimisation of bearing diagnostic techniques using simulated and actual bearing fault signals. Mech. Syst. Signal Process. 2000, 14, 763–788. [Google Scholar] [CrossRef]
- Mottershead, J.E.; Mares, C.; James, S.; Friswell, M.I. Stochastic model updating: Part 2-application to a set of physical structures. Mech. Syst. Signal Process. 2006, 20, 2171–2185. [Google Scholar] [CrossRef]
- Wang, S.; Niu, P.; Guo, Y.; Wang, F.; Ma, X.; Han, L.; Wang, Y. Research on bearing fault diagnosis based on adaptive segmented hybrid system. J. Aerod. 2021, 36, 2090–2100. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Mfg. | Bearing No. | # of R. E. | Outer Ring (Multiple of Running Speed in Hz) | Inner Ring (Multiple of Running Speed in Hz) |
|---|---|---|---|---|---|
| Bearing | NSK | 6328 | 8 | 3.134 fr | 4.866 fr |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, S.; Qiao, Z.; Niu, P. Piecewise Hybrid System with Cross-Correlation Spectral Kurtosis for Fault Diagnosis in Rolling Bearing of Wind Power Generator. Electronics 2023, 12, 1548. https://doi.org/10.3390/electronics12071548
Wang S, Qiao Z, Niu P. Piecewise Hybrid System with Cross-Correlation Spectral Kurtosis for Fault Diagnosis in Rolling Bearing of Wind Power Generator. Electronics. 2023; 12(7):1548. https://doi.org/10.3390/electronics12071548
Chicago/Turabian StyleWang, Shan, Zijian Qiao, and Pingjuan Niu. 2023. "Piecewise Hybrid System with Cross-Correlation Spectral Kurtosis for Fault Diagnosis in Rolling Bearing of Wind Power Generator" Electronics 12, no. 7: 1548. https://doi.org/10.3390/electronics12071548