
Bifurcation Phenomena in Open-Loop DCM-Operated DC–DC Switching Converters Feeding Constant Power Loads
 , , and
, , and
Abstract
:1. Introduction
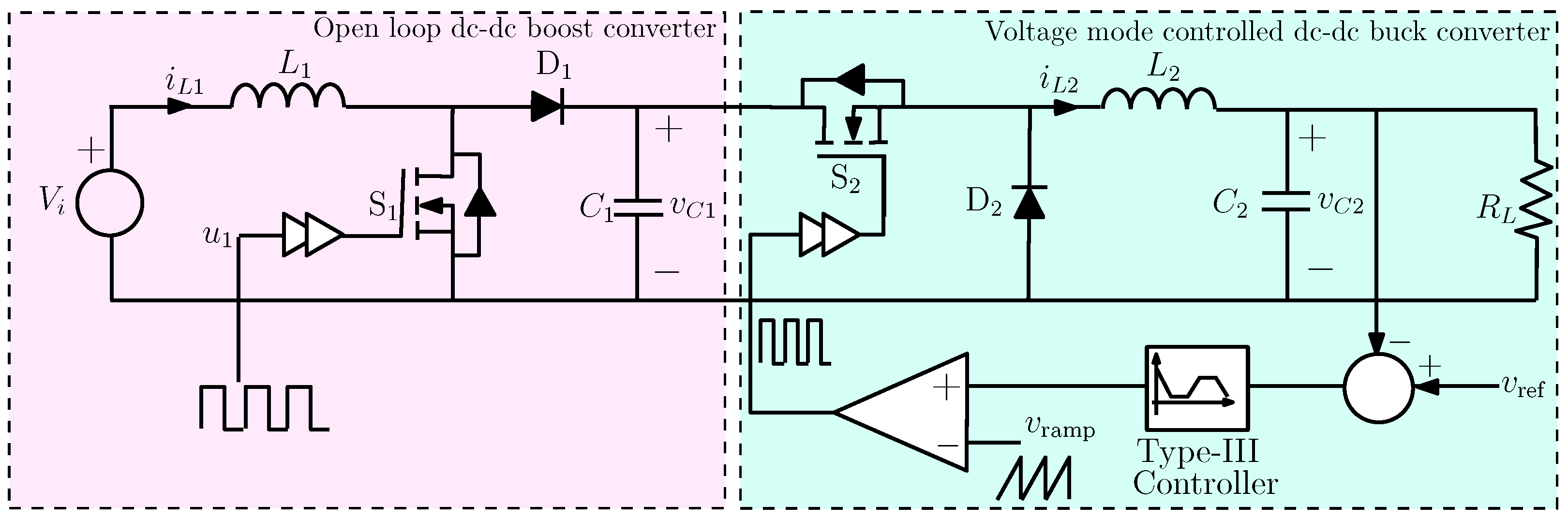
2. Period-Doubling Bifurcation in an Open-Loop DCM-Operated Boost Converter Feeding a Tightly Regulated Buck Converter
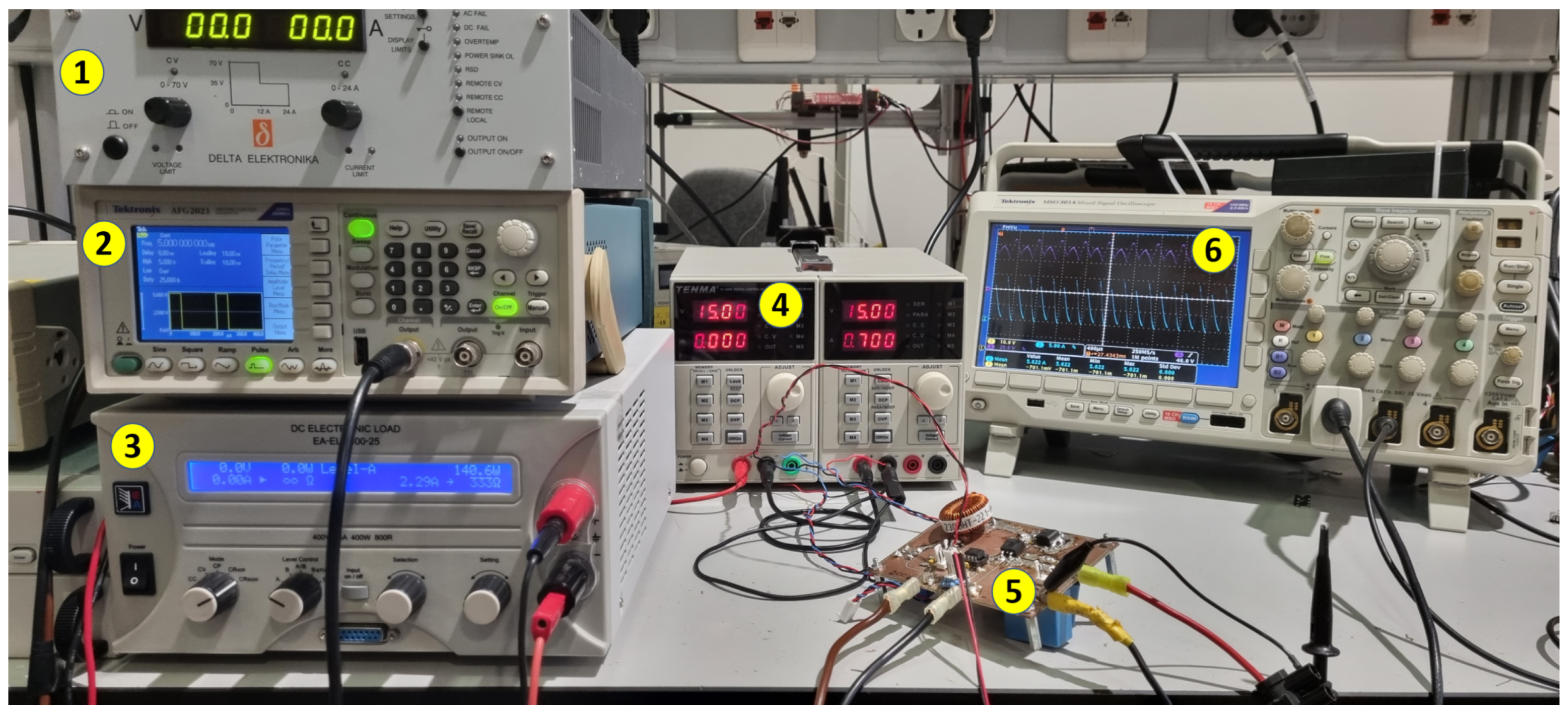
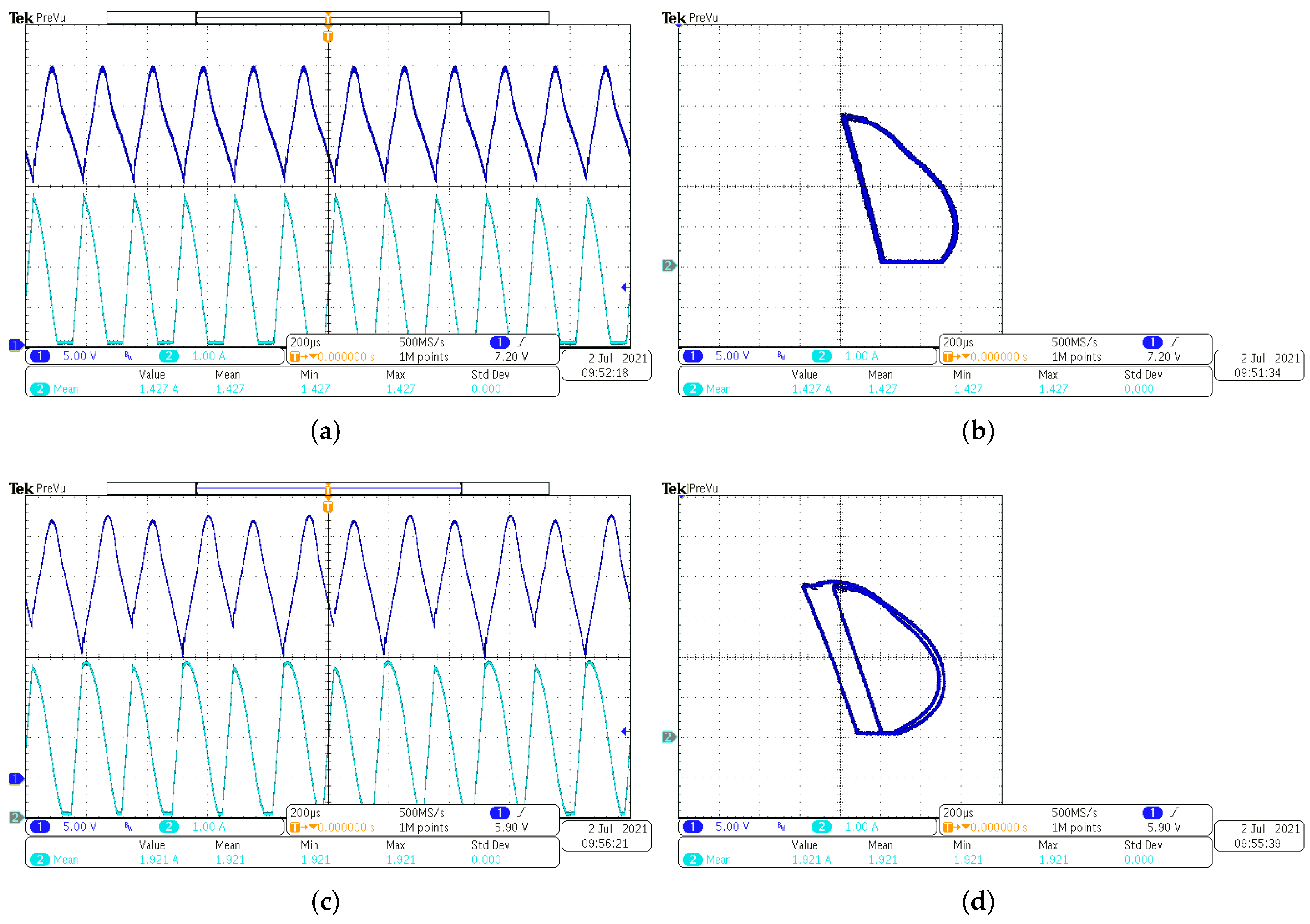
3. Experiments
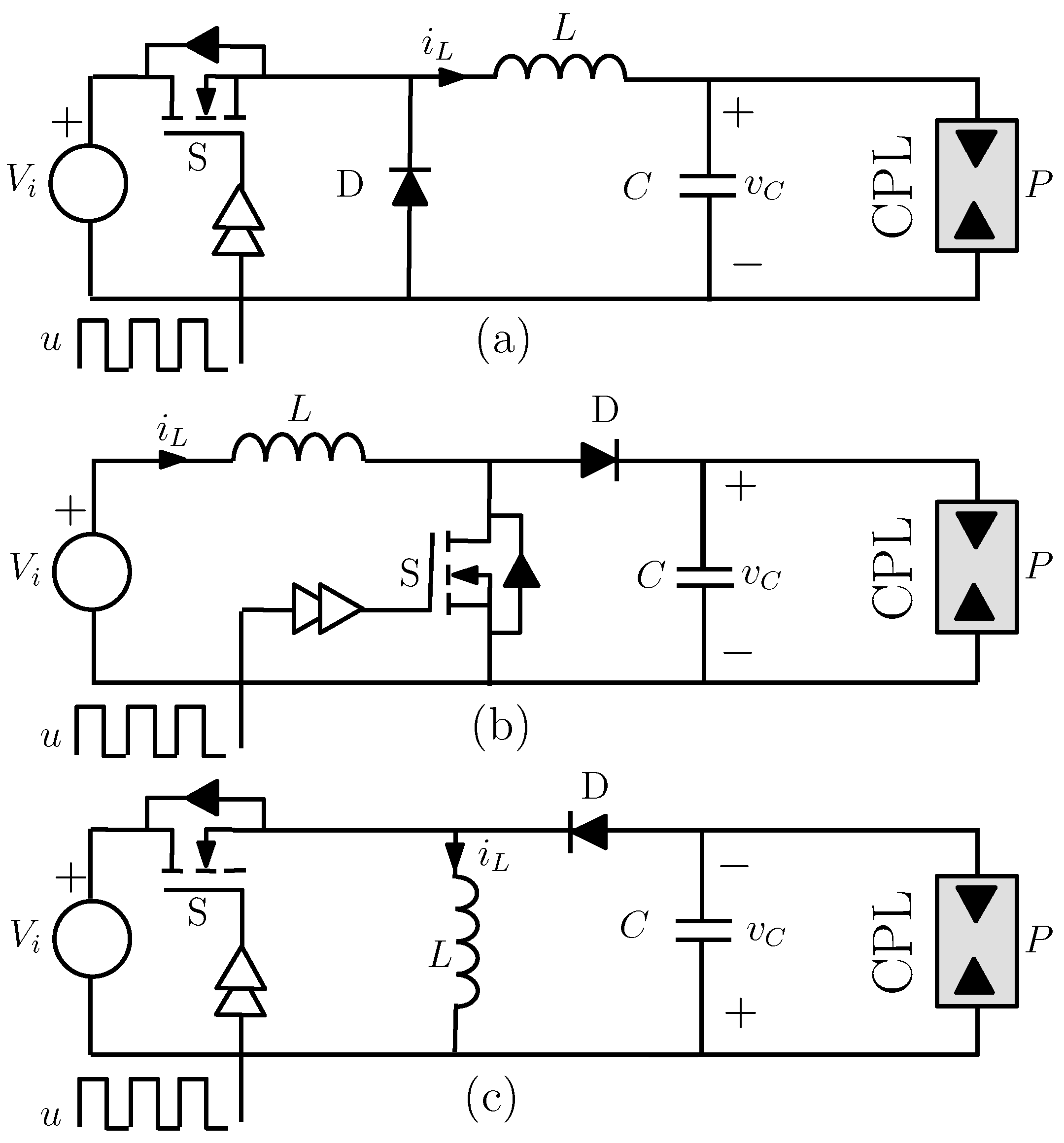
4. Switched Model of Open-Loop Elementary DC–DC Switching Converters with a CPL
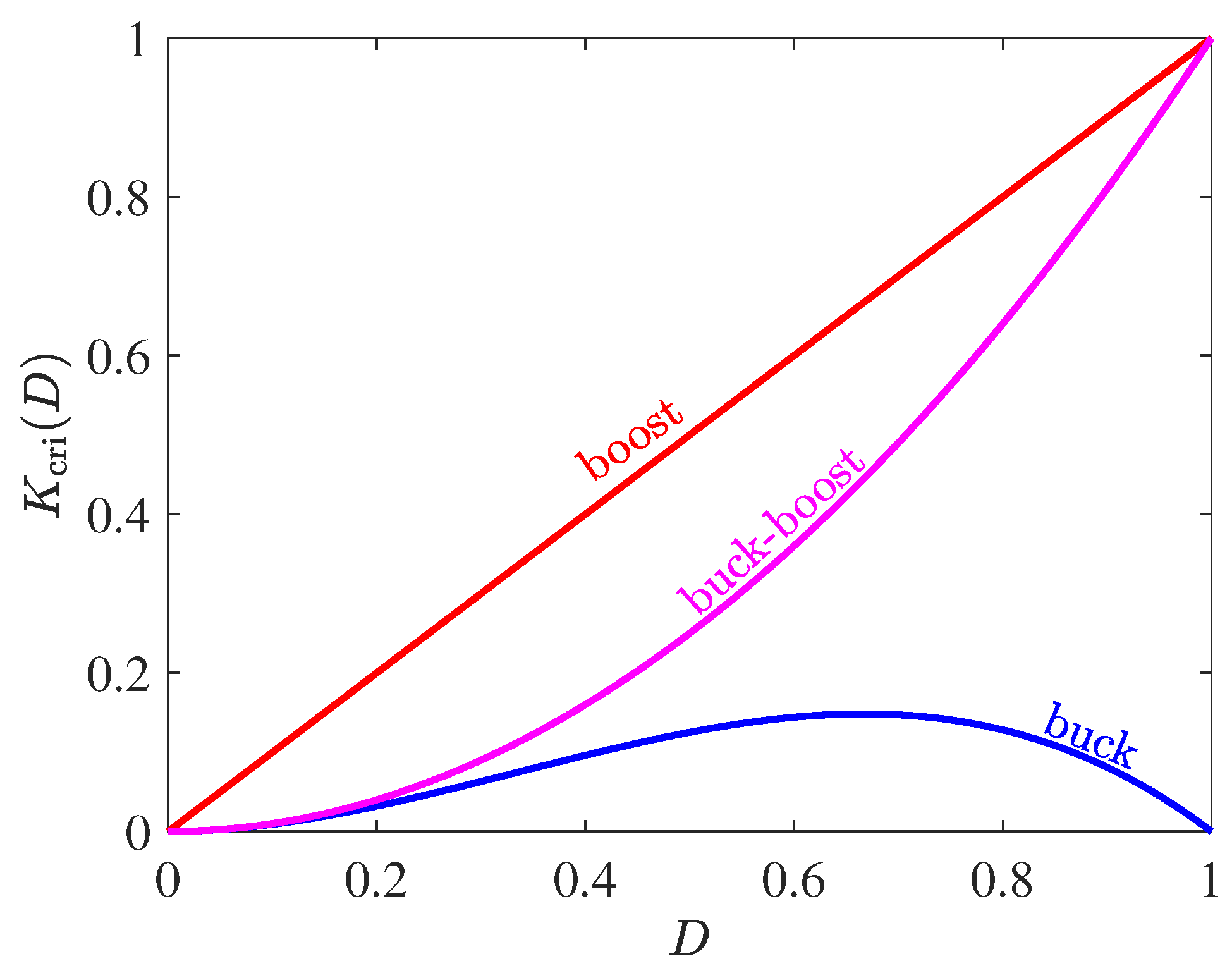
5. Parametric Space Region for DCM Operation
6. Average Dynamics for DCM-Operated Power Converter with a CPL: Equilibrium Point, Static Voltage Conversion Gain, and Stability
6.1. Averaged Model
6.2. Equilibrium Points
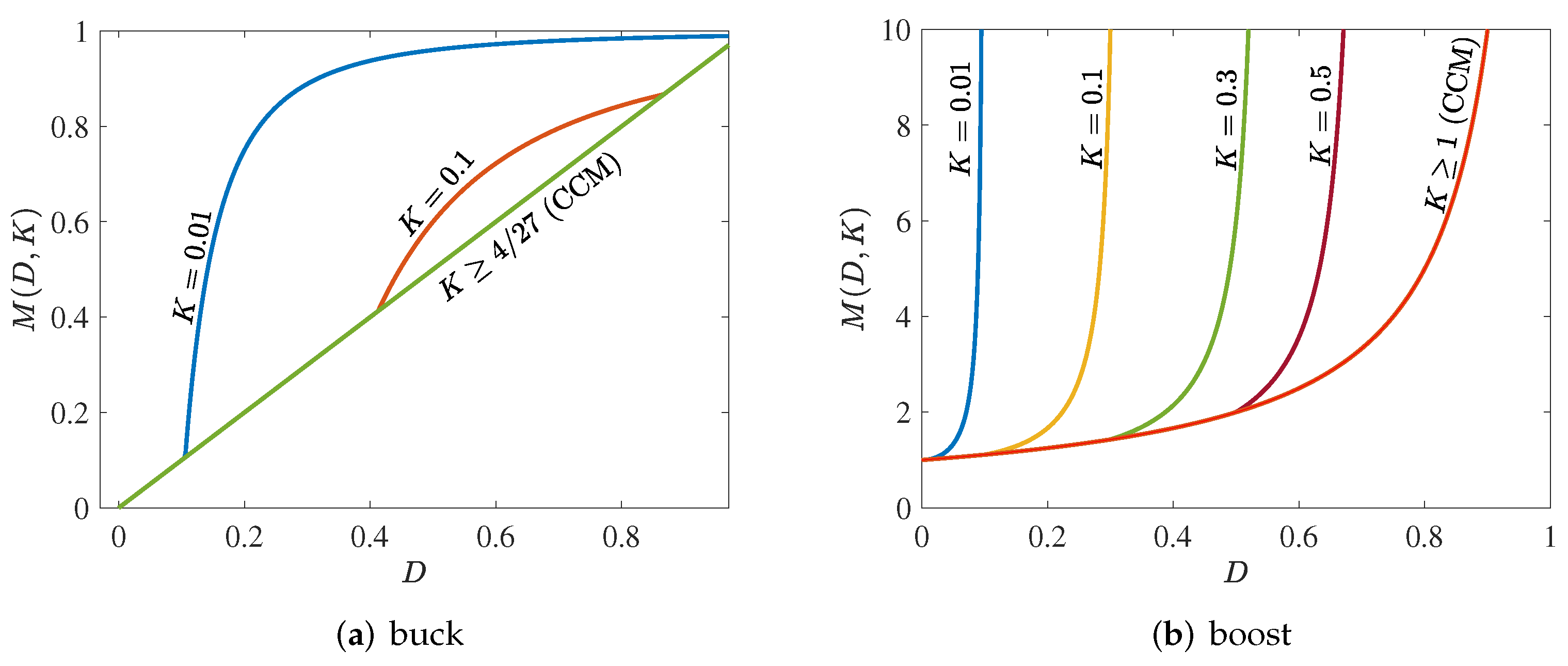
6.3. Conversion Ratio
- (DCM operation): The response does not reach any equilibrium in steady-state. It is unbounded, and the system is unstable.
- (CCM–DCM boundary): The response is bounded, but presents an infinite number of equilibria depending on the initial condition . Indeed, in this case, one has .
- (CCM operation): The response collapses at a certain time instant given by
6.4. Stability at the Low Frequency (Slow Scale)
7. Period-Doubling Bifurcation of Periodic Orbits in Open-Loop-DCM-Operated DC–DC Converters Feeding CPLs
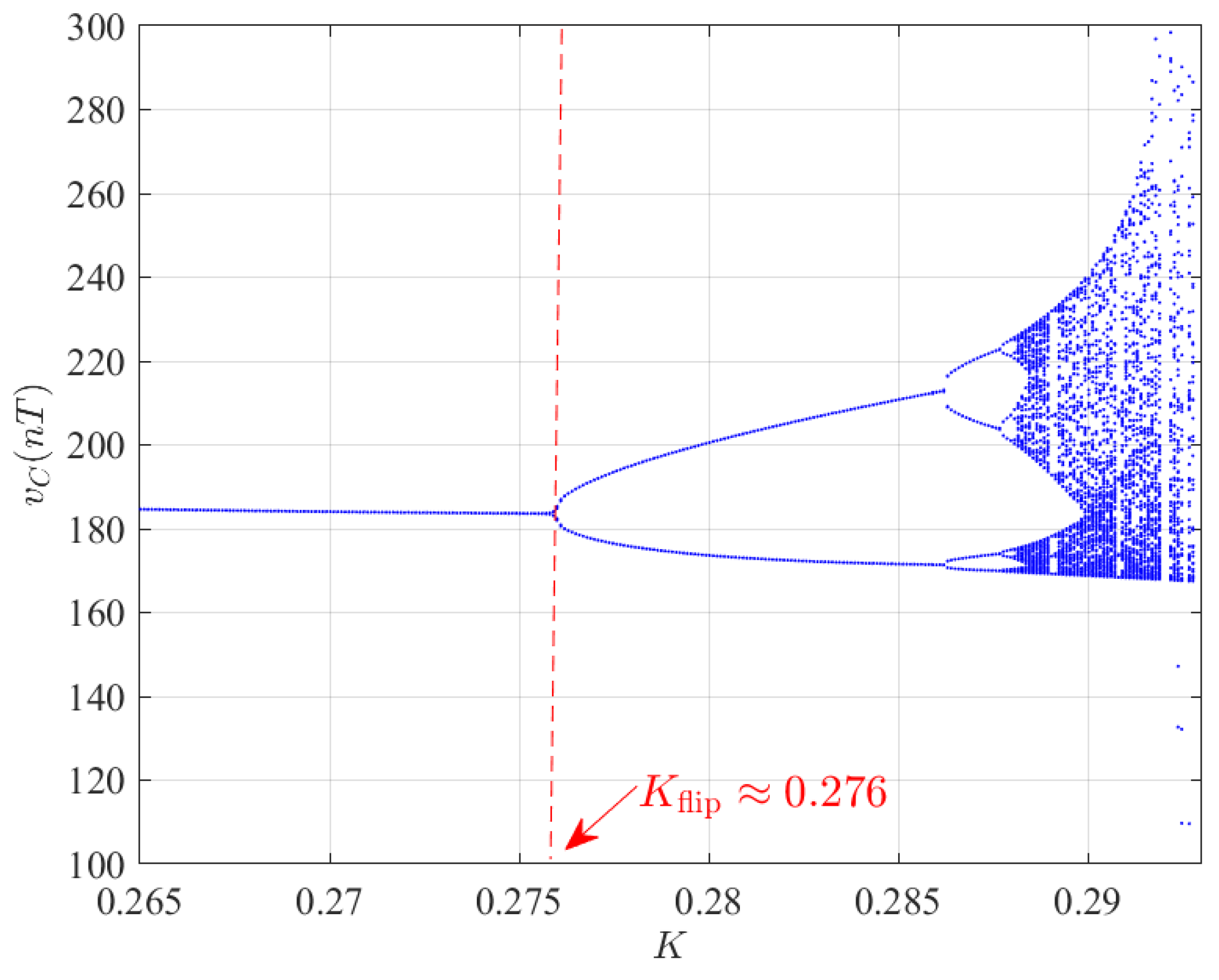
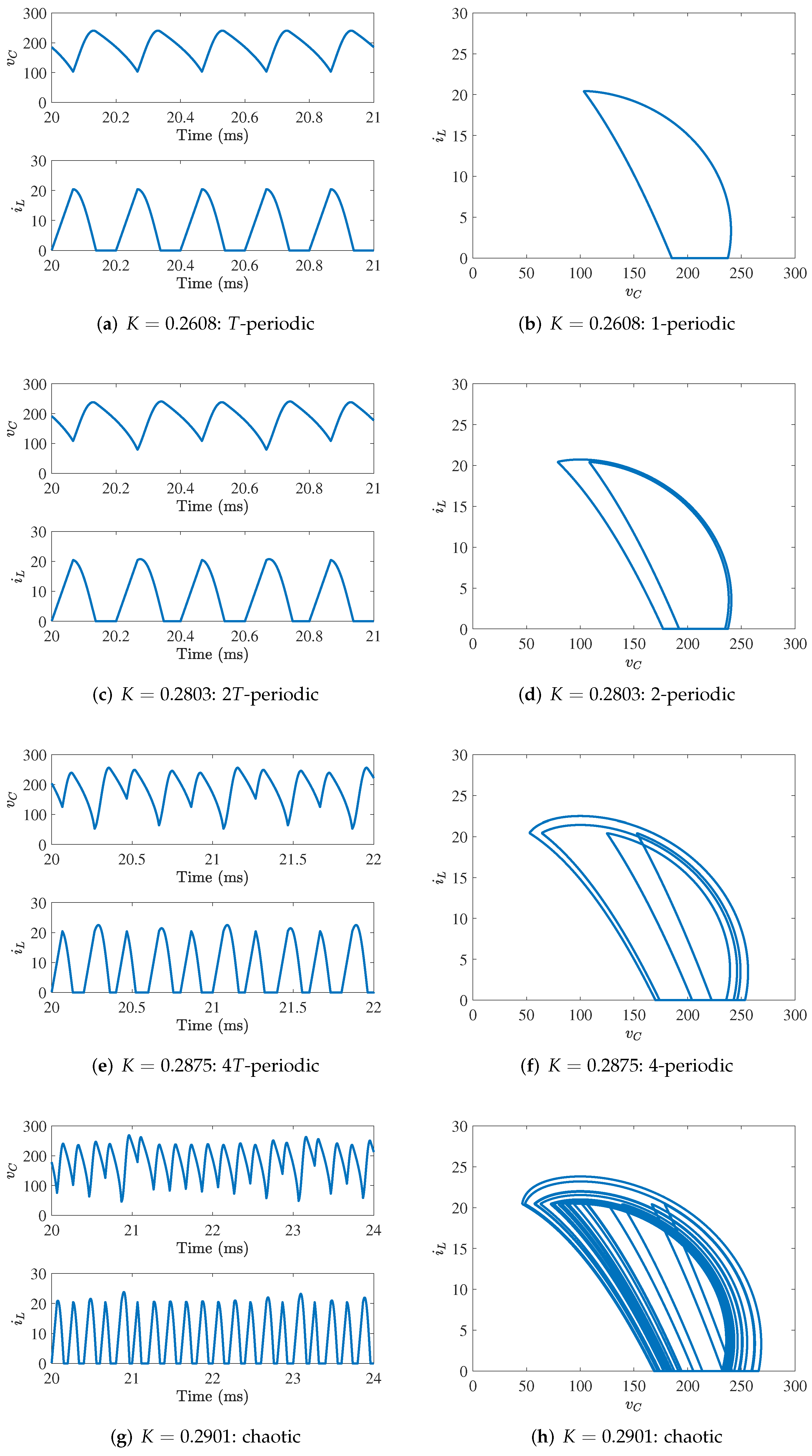
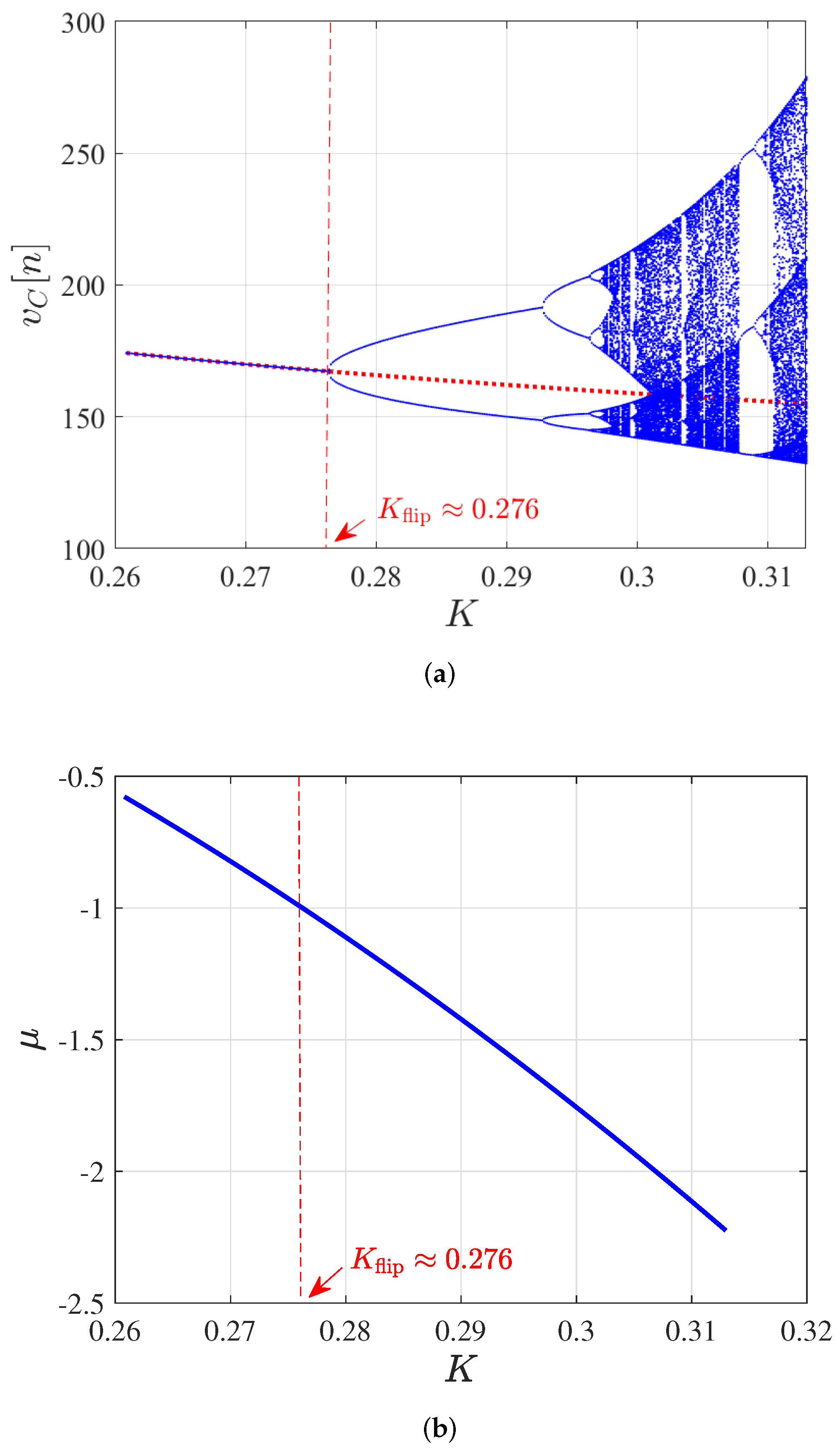
7.1. The Boost Converter
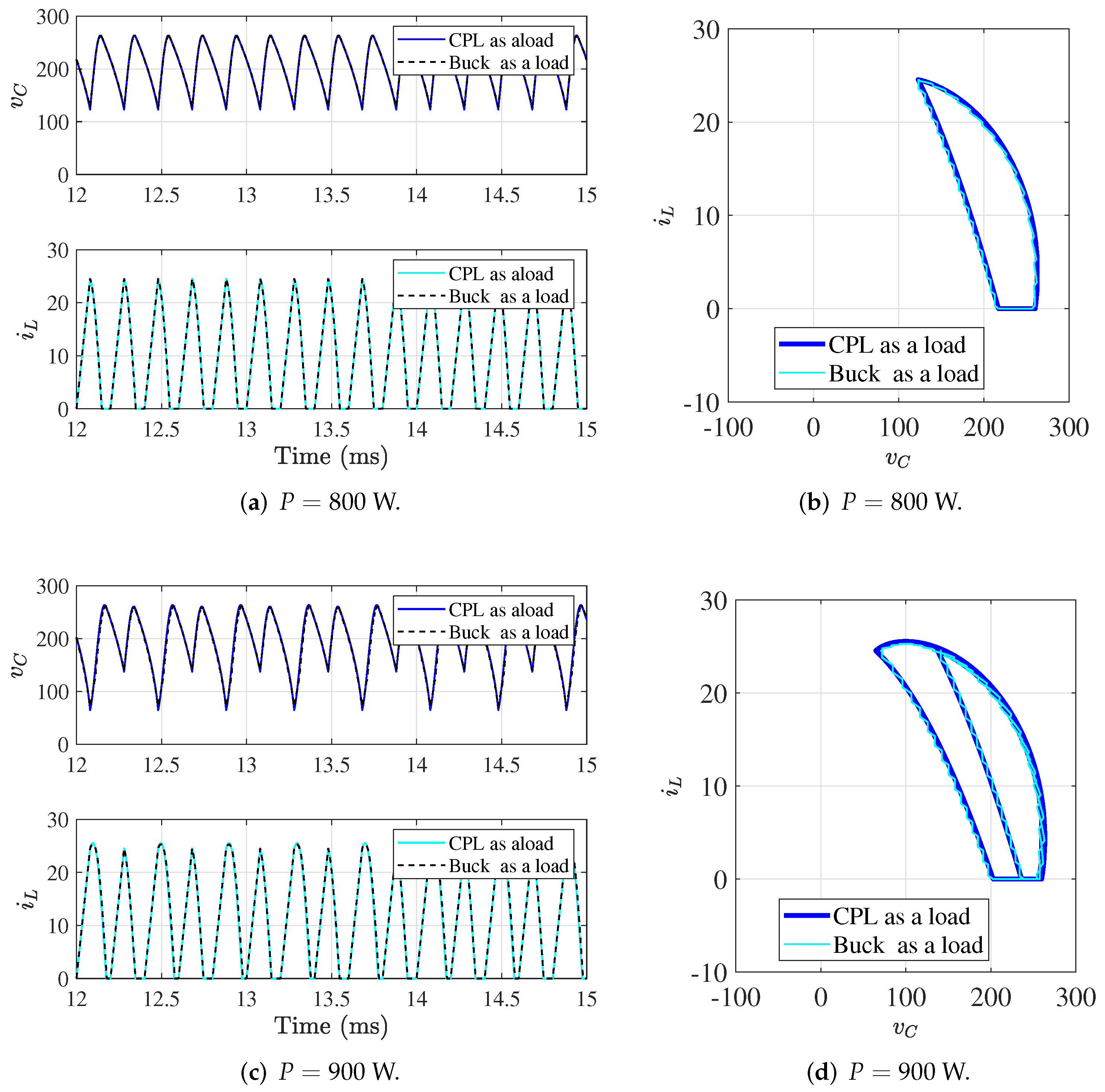
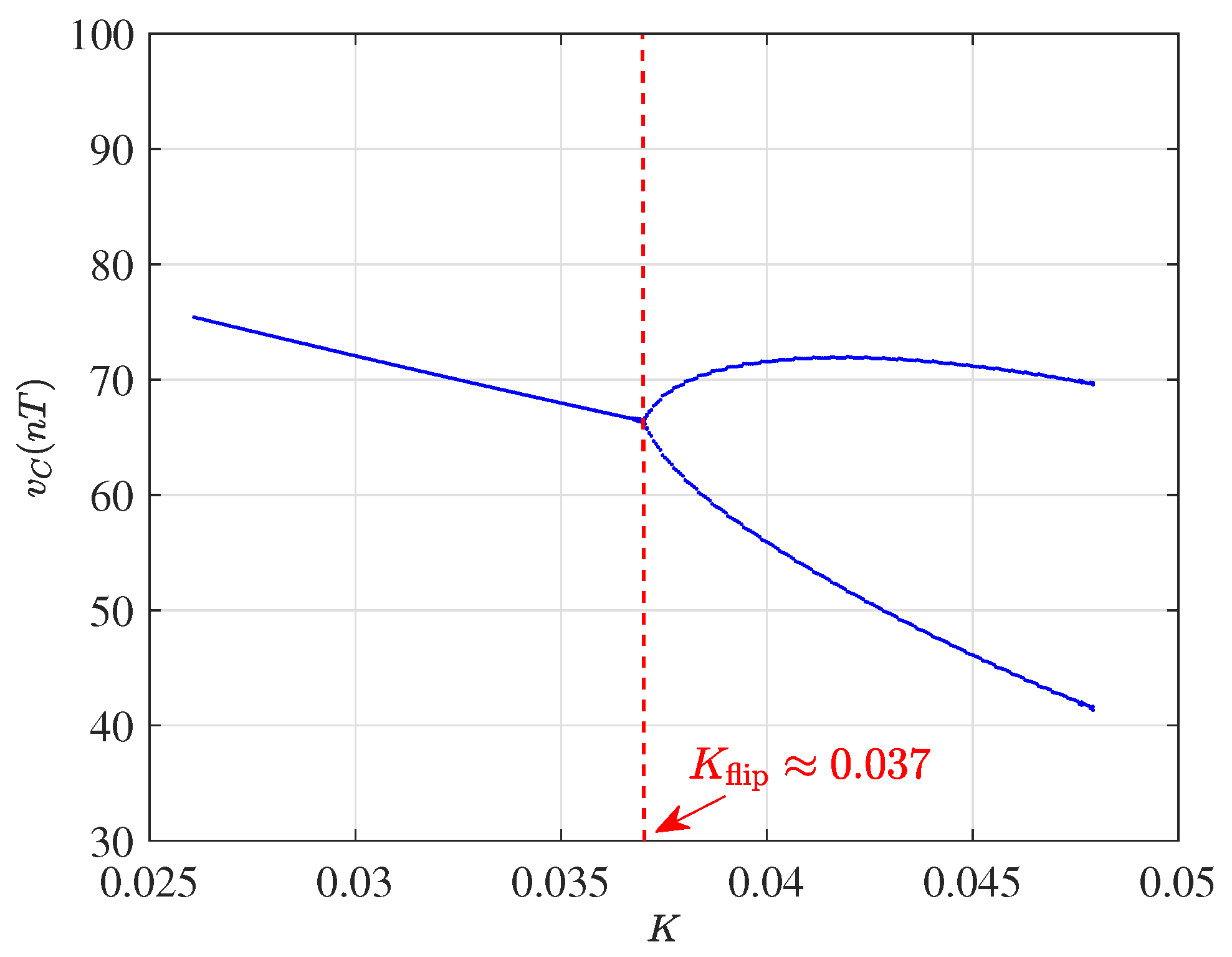
7.2. The Buck Converter
8. Approximate Explicit 1D Discrete-Time Model and Fast-Scale Stability Limits
8.1. Boost Converter
8.1.1. Approximate Map
8.1.2. Fixed Points and Their Stability
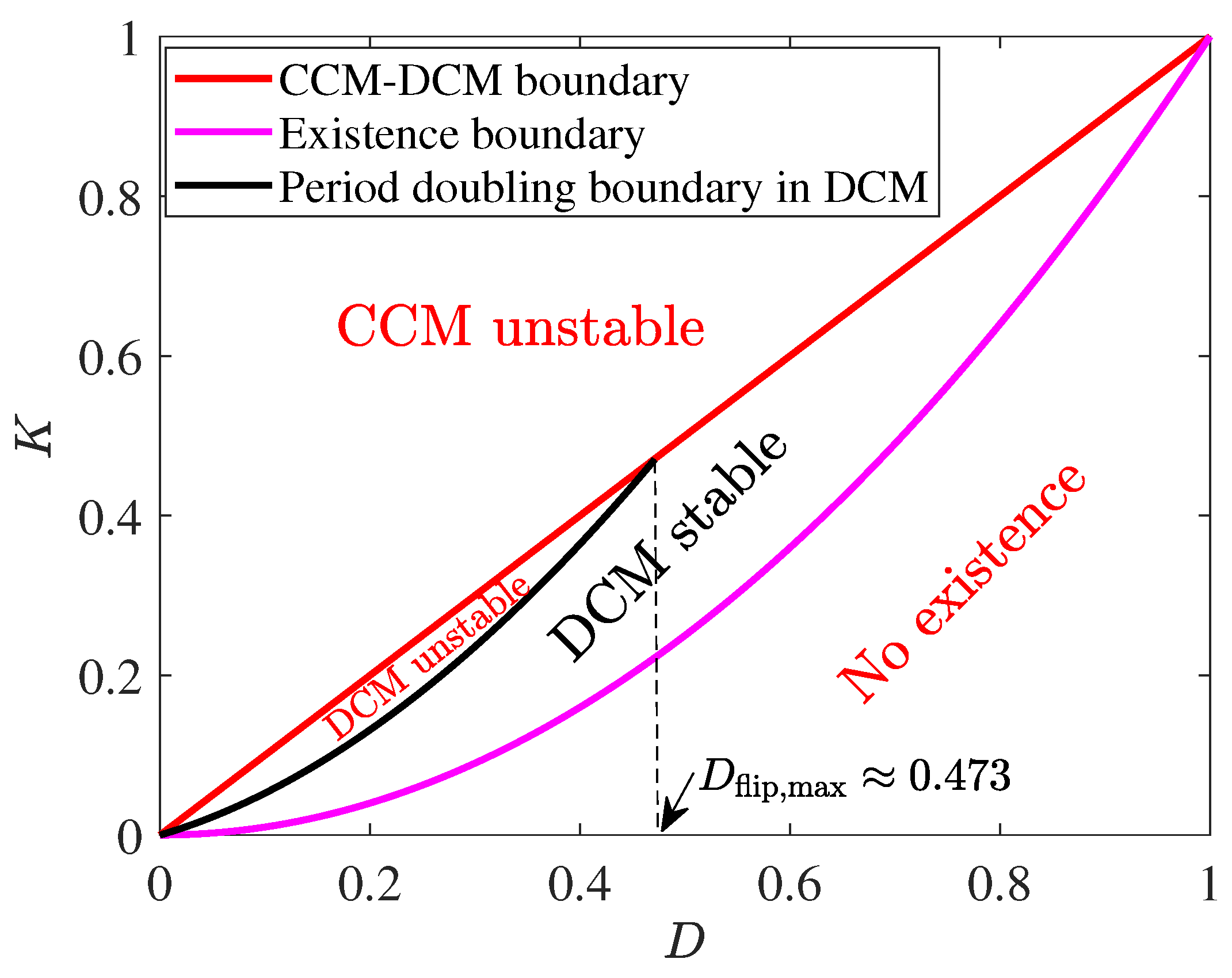
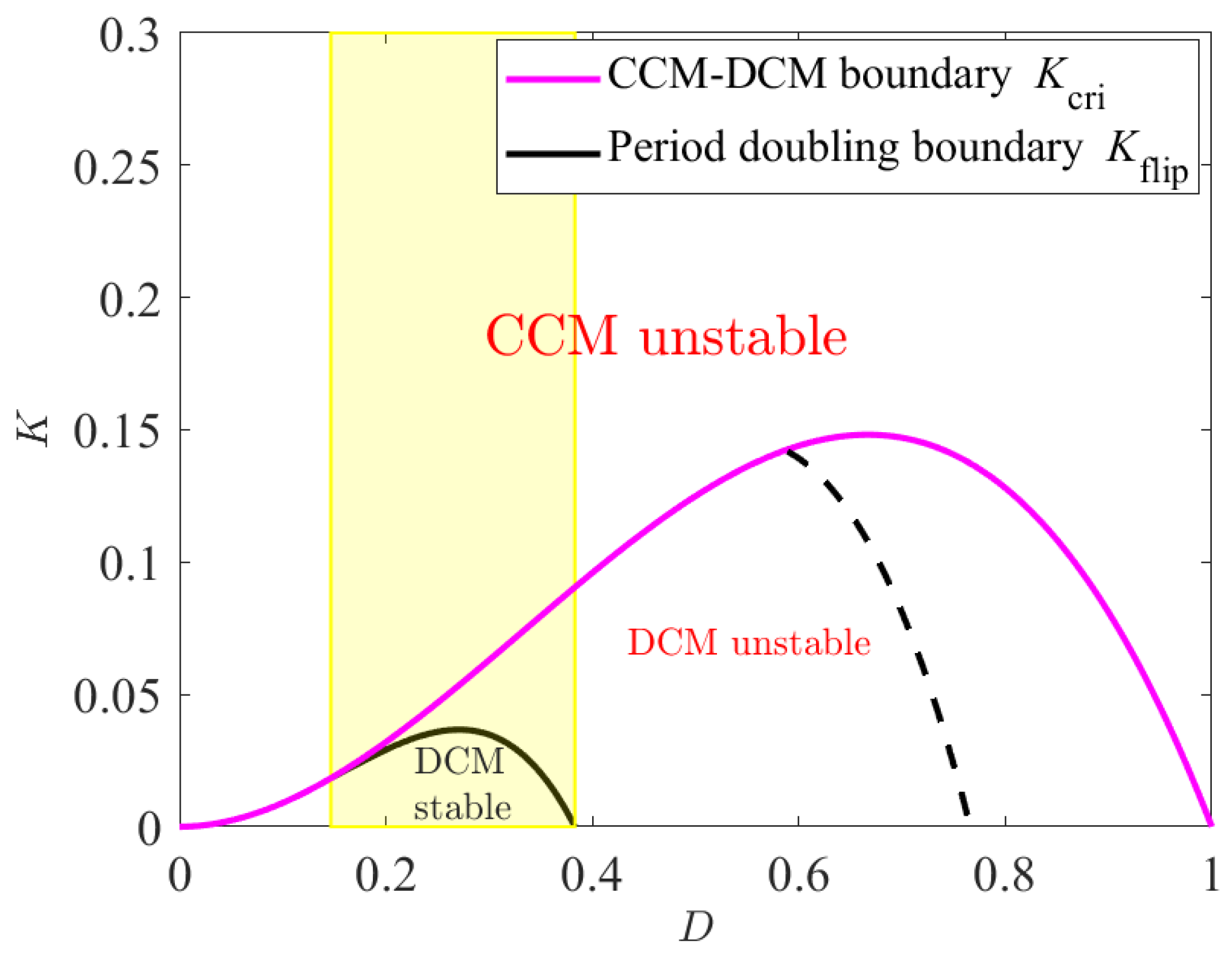
8.1.3. Stability Boundaries in the Parametric Space
8.2. Buck Converter
8.2.1. Approximate Map
8.2.2. Fixed Point and Its Stability
8.2.3. Boundaries in the Parameter Space
9. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Emadi, A.; Ehsani, A. Dynamics and control of multi-converter DC power electronic systems. In Proceedings of the 2001 IEEE 32nd Annual Power Electronics Specialists Conference, Vancouver, BC, Canada, 17–21 June 2001; Volume 1, pp. 248–253. [Google Scholar]
- Khaligh, A. Realization of parasitics in stability of DC–DC converters loaded by constant power loads in advanced multiconverter automotive systems. IEEE Trans. Ind. Electron. 2008, 55, 2295–2305. [Google Scholar] [CrossRef]
- Rivetta, C.; Emadi, A.; Williamson, G.A.; Jayabalan, R.; Fahimi, B. Analysis and control of a buck DC–DC converter operating with constant power load in sea and undersea vehicles. IEEE Trans. Ind. Appl. 2004, 2, 1146–1153. [Google Scholar]
- Sulligoi, G.; Bosich, D.; Giadrossi, G.; Zhu, L.; Cupelli, M.; Monti, A. Multiconverter medium voltage DC power systems on ships, constant power loads instability solution using linearization via state feedback control. IEEE Trans. Smart Grids 2014, 5, 2543–2552. [Google Scholar] [CrossRef]
- Rahimi, A.M.; Emadi, A. An analytical investigation of DC/DC power electronic converters with Constant power loads in vehicular power systems. IEEE Trans. Veh. Technol. 2009, 58, 2689–2702. [Google Scholar] [CrossRef]
- Kwasinski, A.; Onwuchekwa, C.N. Dynamic behavior and stabilization of DC microgrids with instantaneous constant-power loads. IEEE Trans. Power Electron. 2011, 26, 822–834. [Google Scholar] [CrossRef]
- Lu, X.; Sun, K.; Guerrero, J.M.; Vasquez, J.C.; Huang, L.; Wang, J. Stability enhancement based on virtual impedance for DC microgrids with constant power loads. IEEE Trans. Smart Grid 2015, 6, 2770–2783. [Google Scholar] [CrossRef] [Green Version]
- Wu, M.; Lu, D.D.-C. A novel stabilization method of LC input filter with constant power loads without load performance compromise in DC microgrids. IEEE Trans. Ind. Electron. 2015, 62, 4552–4562. [Google Scholar] [CrossRef]
- Al-Nussairi, M.K.; Bayindir, R.; Padmanaban, S.; Popa, L.M.; Siano, P. Constant power loads (CPL) with microgrids: Problem definition, stability analysis and compensation techniques. Energies 2017, 10, 1656. [Google Scholar] [CrossRef]
- Griffo, A.; Wang, J. Large signal stability analysis of ‘more electric’ aircraft power systems with constant power loads. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 477–489. [Google Scholar] [CrossRef]
- Belkhayat, M.; Cooley, R.; Witulski, A. Large signal stability criteria for distributed systems with constant power loads. In Proceedings of the 26th Annual IEEE Power Electronics Specialists Conference, PESC’95 Record, Atlanta, GA, USA, 18–22 June 1995; Volume 2, pp. 1333–1338. [Google Scholar]
- Li, Y.; Vannorsdel, K.R.; Zirger, A.J.; Norris, M.; Maksimović, D. Current mode control for boost converters with constant power loads. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 2012, 59, 198–206. [Google Scholar] [CrossRef]
- Choi, B.; Cho, B.H.; Hong, S.-S. Dynamics and control of DC-to-DC converters driving other converters downstream. IEEE Trans. Circuits Syst. I Fundam. Appl. 1999, 46, 1240–1248. [Google Scholar] [CrossRef]
- Emadi, A.; Khaligh, A.; Rivetta, C.H.; Williamson, G.A. Constant power loads and negative impedance instability in automotive systems: Definition, modeling, stability, and control of power electronic converters and motor drives. IEEE Trans. Vehecular Technol. 2006, 55, 1112–1125. [Google Scholar] [CrossRef]
- Tse, C.K.; Adams, K.M. Qualitative analysis and control of a DC-to-DC boost converter operating in discontinuous mode. IEEE Trans. Power Electron. 1990, 5, 323–330. [Google Scholar] [CrossRef]
- Middlebrook, R.D. Input filter considerations in design and applications of switching regulators. In Proceedings of the IEEE Industry Applications Society Annual Meeting, Chicago, IL, USA, 11–14 October 1976; pp. 91–107. [Google Scholar]
- Deane, J.H.B.; Hamill, D.C. Instability, subharmonics, and chaos in power electronic systems. IEEE Trans. Power Electron. 1990, 5, 260–268. [Google Scholar] [CrossRef]
- Banerjee, S.; Verghese, G.C. Nonlinear Phenomena in Power Electronics—Attractors, Bifurcations, Chaos, and Nonlinear Control; IEEE Press: Piscataway, NJ, USA, 2001. [Google Scholar]
- Tse, C.K. Complex Behavior of Switching Power Converters; CRC Press: Boca Raton, FL, USA, 2003. [Google Scholar]
- Emadi, A.; Fahimi, B.; Ehsani, M. On the concept of negative impedance instability in the more electric aircraft power systems with constant power loads. SAE Trans. 1999, 108, 689–699. [Google Scholar]
- Smithson, S.C.; Williamson, S.S. Constant power loads in more electric vehicles—An overview. In Proceedings of the IECON 2012—38th Annual Conference on IEEE Industrial Electronics Society, Montreal, QC, Canada, 25–28 October 2012; pp. 2914–2922. [Google Scholar]
- Grigore, V.; Hatonen, J.; Kyyra, J.; Suntio, T. Dynamics of a buck converter with a constant power load. In Proceedings of the 29th IEEE Power Electronics Specialists Conference, Fukuoka, Japan, 22 May 1998; pp. 72–78. [Google Scholar]
- Rahimi, A.; Emadi, A. Discontinuous-conduction mode DC/DC converters feeding constant-power loads. IEEE Trans. Ind. Electron. 2010, 57, 1318–1329. [Google Scholar] [CrossRef]
- Hamill, D.C.; Deane, J.H.B.; Jefferies, D. Modeling of chaotic DC–DC converters by iterated nonlinear mappings. IEEE Trans. Power Electron. 1992, 7, 25–36. [Google Scholar] [CrossRef]
- Di Bernardo, M.; Vasca, F. Discrete-time maps for the analysis of bifurcations and chaos in DC/DC converters. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 2000, 47, 130–143. [Google Scholar] [CrossRef]
- Chakrabarty, K.; Poddar, G.; Banerjee, S. Bifurcation behavior of the buck converter. IEEE Trans. Power Electron. 1996, 11, 439–447. [Google Scholar] [CrossRef]
- Fossas, E.; Olivar, G. Study of chaos in the buck converter. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 1996, 43, 13–25. [Google Scholar] [CrossRef] [Green Version]
- Papafotiou, G.A.; Margaris, N.I. Calculation and stability investigation of periodic steady-states of the voltage controlled Buck DC–DC converter. IEEE Trans. Power Electron. 2004, 19, 959–970. [Google Scholar] [CrossRef]
- Chu, G.; Tse, C.K.; Wong, S.C. Line-frequency instability of PFC power supplies. IEEE Trans. Power Electron. 2009, 24, 469–482. [Google Scholar] [CrossRef]
- El Aroudi, A.; Haroun, R.; Al-Numay, M.; Calvente, J.; Giral, R. A Large-signal model for a peak current mode controlled boost converter with constant power loads. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 559–568. [Google Scholar] [CrossRef]
- El Aroudi, A.; Haroun, R.; Al-Numay, M.; Calvente, J.; Giral, R. Fast-scale stability analysis of a DC–DC boost converter with a constant power load. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 9, 549–558. [Google Scholar] [CrossRef]
- Cristiano, R.; Pagano, D.J.; Benadero, L.; Ponce, E. Bifurcation analysis of a DC–DC bidirectional power converter operating with constant power loads. Int. J. Bifurc. Chaos 2016, 26, 1630010. [Google Scholar] [CrossRef] [Green Version]
- El Aroudi, A.; Debbat, M.; Giral, R.; Martinez-Salamero, L. Quasiperiodic route to chaos in DC–DC switching regulators. In Proceedings of the ISIE 2001, 2001 IEEE International Symposium on Industrial Electronics Proceedings (Cat. No.01TH8570), Pusan, Republic of Korea, 12–16 June 2001; Volume 3, pp. 2130–2135. [Google Scholar]
- Zadeh, M.K.; Gavagsaz-Ghoachani, R.; Martin, J.P.; Nahid-Mobarakeh, B.; Pierfederici, S.; Molinas, M. Discrete-time modeling, stability analysis, and active stabilization of DC distribution systems with multiple constant power loads. IEEE Trans. Ind. Appl. 2016, 52, 4888–4898. [Google Scholar] [CrossRef]
- Zadeh, M.K.; Gavagsaz-Ghoachani, R.; Martin, J.; Pierfederici, S.; Nahid-Mobarakeh, B.; Molinas, M. Discrete-Time Tool for Stability Analysis of DC Power Electronics-Based Cascaded Systems. IEEE Trans. Power Electron. 2017, 32, 652–667. [Google Scholar] [CrossRef] [Green Version]
- Saublet, L.; Gavagsaz-Ghoachani, R.; Martin, J.; Nahid-Mobarakeh, B.; Pierfederici, S. Asymptotic stability analysis of the limit cycle of a cascaded DC–DC converter using sampled discrete-time modeling. IEEE Trans. Ind. Electron. 2016, 63, 2477–2487. [Google Scholar] [CrossRef]
- Saublet, L.; Gavagsaz-Ghoachani, R.; Martin, J.; Nahid-Mobarakeh, B.; Pierfederici, S. Bifurcation analysis and stabilization of DC power systems for electrified transportation systems. IEEE Trans. Transp. Electrif. 2016, 2, 86–95. [Google Scholar] [CrossRef]
- Tse, C.K. Flip bifurcation and chaos in three-state boost switching regulators. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 1994, 41, 16–23. [Google Scholar] [CrossRef]
- Tse, C.K. Chaos from a buck switching regulator operating in discontinuous mode. Int. J. Circ. Theor. Appl. 1994, 22, 263–278. [Google Scholar] [CrossRef]
- Giaouris, D.; Banerjee, S.; Zahawi, B.; Pickert, V. Stability analysis of the continuous conduction mode buck converter via Filippov’s method. IEEE Trans. Circuits Syst. I 2008, 55, 1084–1096. [Google Scholar] [CrossRef] [Green Version]
- Cheng, L.; Ki, W.-H.; Yang, F.; Mok, P.K.T.; Jing, X. Predicting subharmonic oscillation of voltage-mode switching converters using a circuit-oriented geometrical approach. IEEE Trans. Circuits Syst. I Regul. Pap. 2017, 64, 717–730. [Google Scholar] [CrossRef]
- Redl, R.; Novak, I. Instabilities in current-mode controlled switching voltage regulators. In Proceedings of the 1981 IEEE Power Electronics Specialists Conference, Boulder, CO, USA, 29 June–3 July 1981; pp. 17–28. [Google Scholar]
- Zafrany, I.; Ben-Yaakov, S. A chaos model of subharmonic oscillations in current mode PWM boost converters. In Proceedings of the IEEE Power Electronics Specialists Conference, Atlanta, GA, USA, 18–22 June 1995; pp. 1111–1117. [Google Scholar]
- Chan, W.C.Y.; Tse, C.K. Study of bifurcations in current-programmed DC/DC boost converters: From quasiperiodicity to period-doubling. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 1997, 44, 1129–1142. [Google Scholar] [CrossRef] [Green Version]
- Tse, C.K.; Chan, W.C.Y. Chaos from a current programmed Cuk converter. Int. J. Circuit Theory Appl. 1995, 23, 217–225. [Google Scholar] [CrossRef]
- Deane, H.B.; Hamill, D.C. Chaotic behavior in current-mode controlled DC/DC converters. Inst. Elect. Eng. Electron. Lett. 1991, 13, 1172–1173. [Google Scholar]
- Deane, J.H.B. Chaos in a current-mode controlled boost DC/DC converter. IEEE Trans. Circuits Syst. I 1992, 39, 680–683. [Google Scholar] [CrossRef]
- Fang, C. Unified Discrete-Time Modeling of Buck Converter in Discontinuous Mode. IEEE Trans. Power Electron. 2011, 26, 2335–2342. [Google Scholar] [CrossRef]
- Benadero, L.; Aroudi, A.E.; Martinez-Salamero, L.; Tse, C.K. Period doubling route to chaos in open-loop boost converters under constant power loading and discontinuous conduction mode conditions. In Proceedings of the IEEE International Symposium on Circuits and Systems, (ISCAS 2020), Seville, Spain, 12–14 October 2020. [Google Scholar]
- Erickson, R.W.; Maksimovic, D. Fundamentals of Power Electronics; Kluwer Academic Publishers: Amsterdam, The Netherlands, 2001. [Google Scholar]
- El Aroudi, A. A new approach for accurate prediction of subharmonic oscillation in switching regulators—Part I: Mathematical derivations. IEEE Trans. Power Electron. 2017, 32, 5651. [Google Scholar] [CrossRef]
- Chen, Y.; Tse, C.K.; Qiu, S.S.; Lindenmuller, L.; Schwarz, W. Coexisting fast-scale and slow-scale instability in current-mode controlled DC/DC converters: Analysis, simulation and experimental results. IEEE Trans. Circuits Syst. I Regul. Pap. 2008, 55, 3335–3348. [Google Scholar] [CrossRef] [Green Version]
- Benadero, L.; El Aroudi, A.; Martinez-Salamero, L.; Tse, C.K. In-depth analysis of smooth and nonsmooth bifurcations for an open-loop boost converter feeding constant power loads in discontinuous conduction mode. Int. J. Bifurc. Chaos 2022. submitted. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Source Converter (Boost) | Load Converter (Buck) |
|---|---|
| Input voltage, V | Output voltage 48 V |
| Duty cycle, | Load resistance variable |
| Inductance, μH | Inductance μH |
| Capacitance, μF | Capacitance μF |
| Switching frequency kHz | Switching frequency kHz |
| Buck | Boost | Buck–Boost | |
|---|---|---|---|
| Buck | Boost | Buck–Boost | |
|---|---|---|---|
| D |
| Buck | Boost | Buck–Boost | |
|---|---|---|---|
| L | C | T | D | |
|---|---|---|---|---|
| 100 V | 326 μH | 4.5 μF | 200 μs |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
El Aroudi, A.; Benadero, L.; Haroun, R.; Martínez-Salamero, L.; Tse, C.K. Bifurcation Phenomena in Open-Loop DCM-Operated DC–DC Switching Converters Feeding Constant Power Loads. Electronics 2023, 12, 1030. https://doi.org/10.3390/electronics12041030
El Aroudi A, Benadero L, Haroun R, Martínez-Salamero L, Tse CK. Bifurcation Phenomena in Open-Loop DCM-Operated DC–DC Switching Converters Feeding Constant Power Loads. Electronics. 2023; 12(4):1030. https://doi.org/10.3390/electronics12041030
Chicago/Turabian StyleEl Aroudi, Abdelali, Luis Benadero, Reham Haroun, Luis Martínez-Salamero, and Chi K. Tse. 2023. "Bifurcation Phenomena in Open-Loop DCM-Operated DC–DC Switching Converters Feeding Constant Power Loads" Electronics 12, no. 4: 1030. https://doi.org/10.3390/electronics12041030