



Emerging Spiral Waves and Coexisting Attractors in Memductance-Based Tabu Learning Neurons

Abstract
:1. Introduction
2. Model Description
Rest Points and Their Stability
3. Dynamical Behaviors of Tabu Learning Neuron
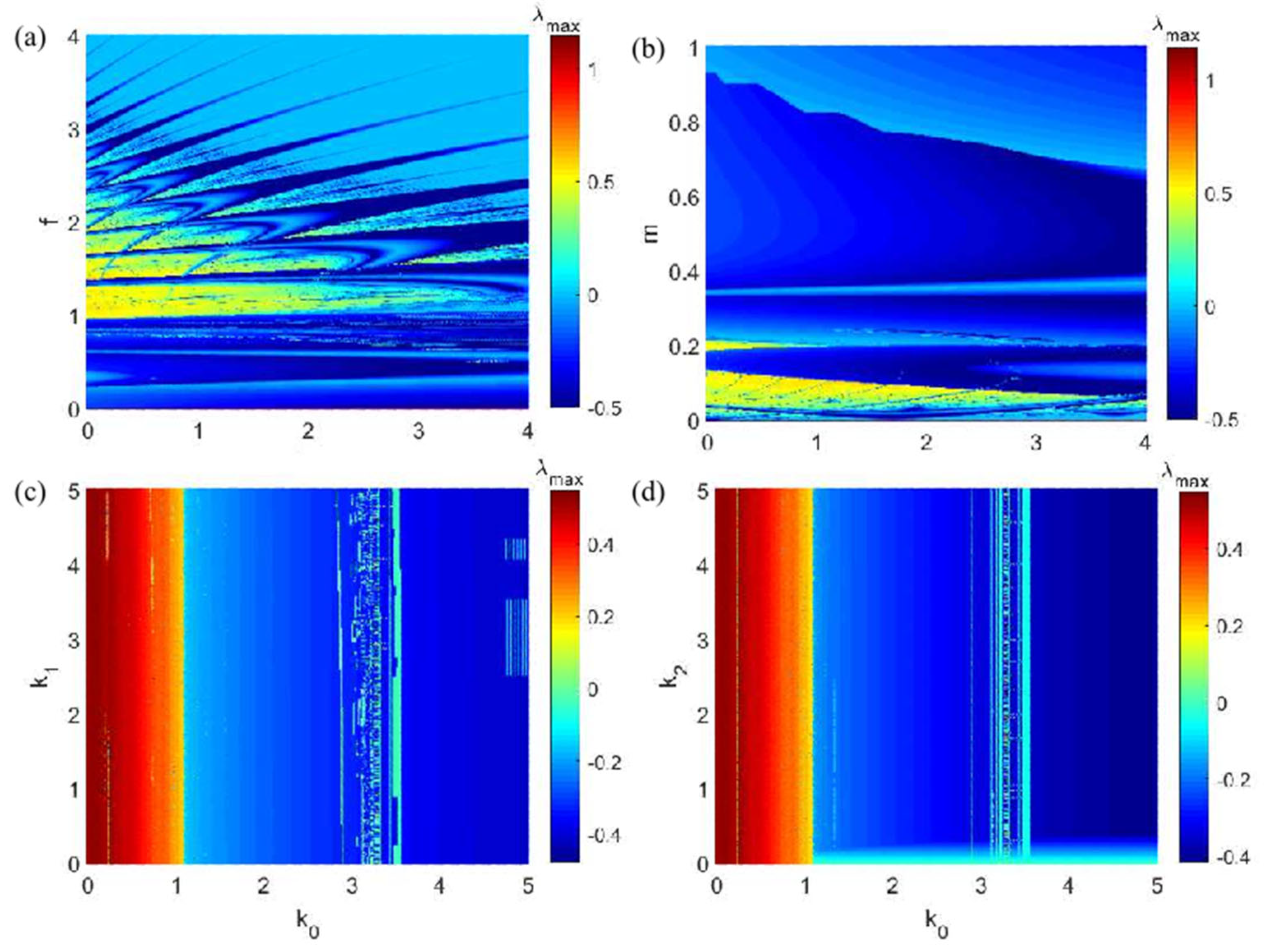
3.1. Two-Parameter Analysis in Distinct Parametric Spaces
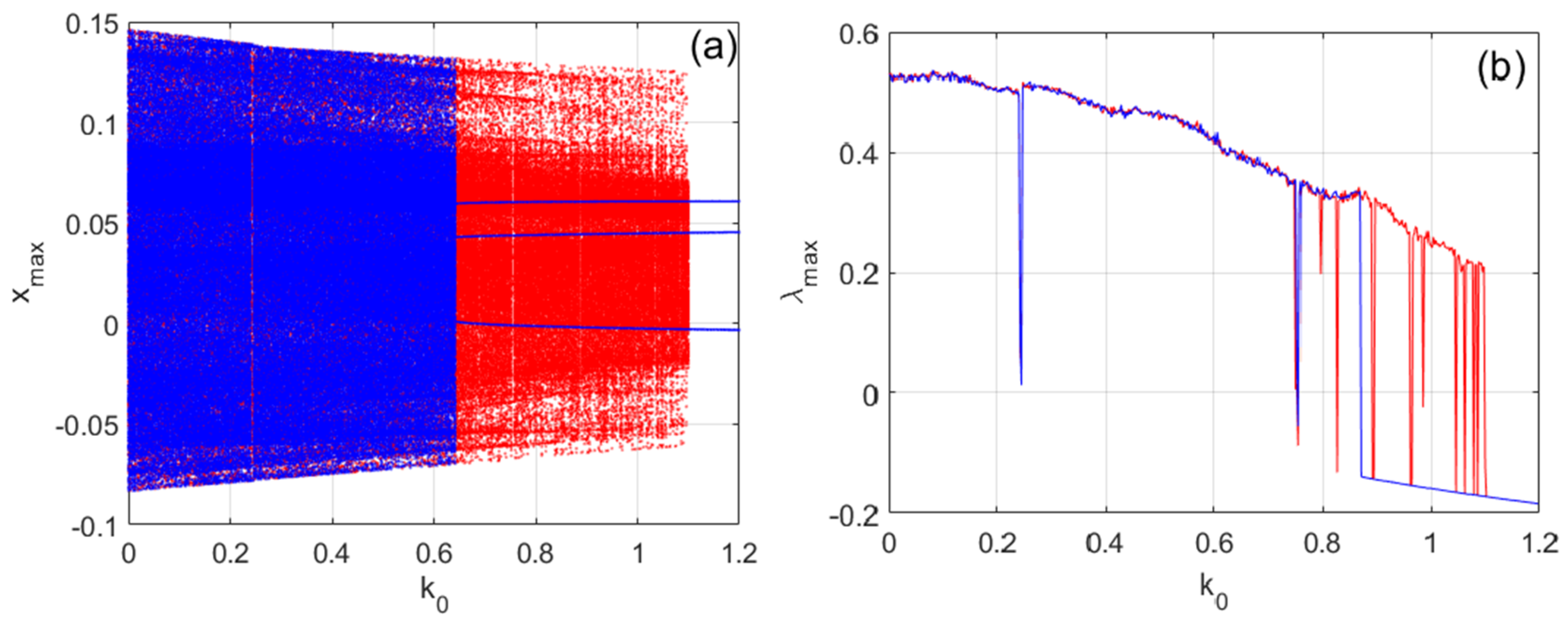
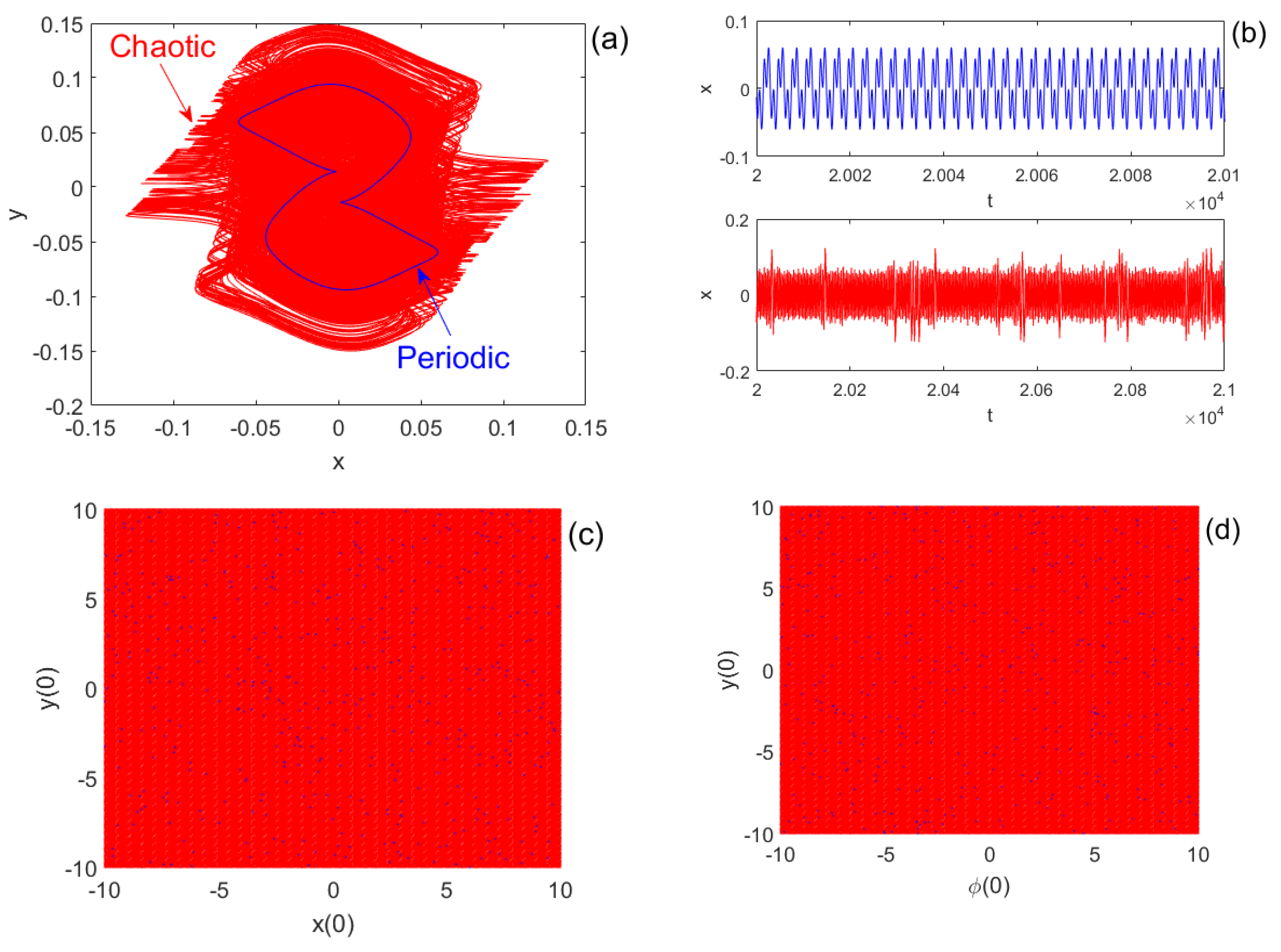
3.2. Coexisting Attractors through Bifurcation, Lyapunov Exponents, and Basin of Attraction
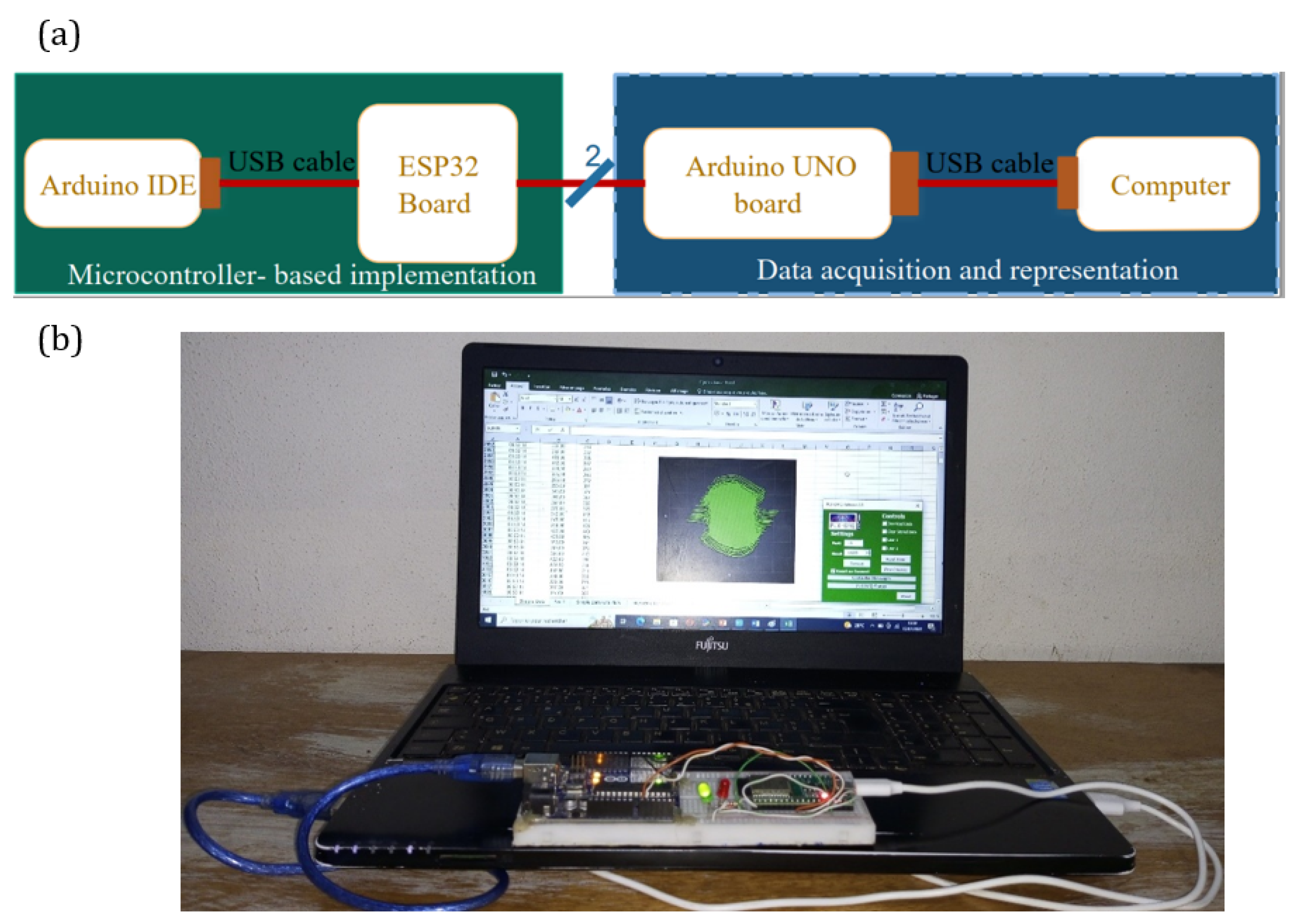
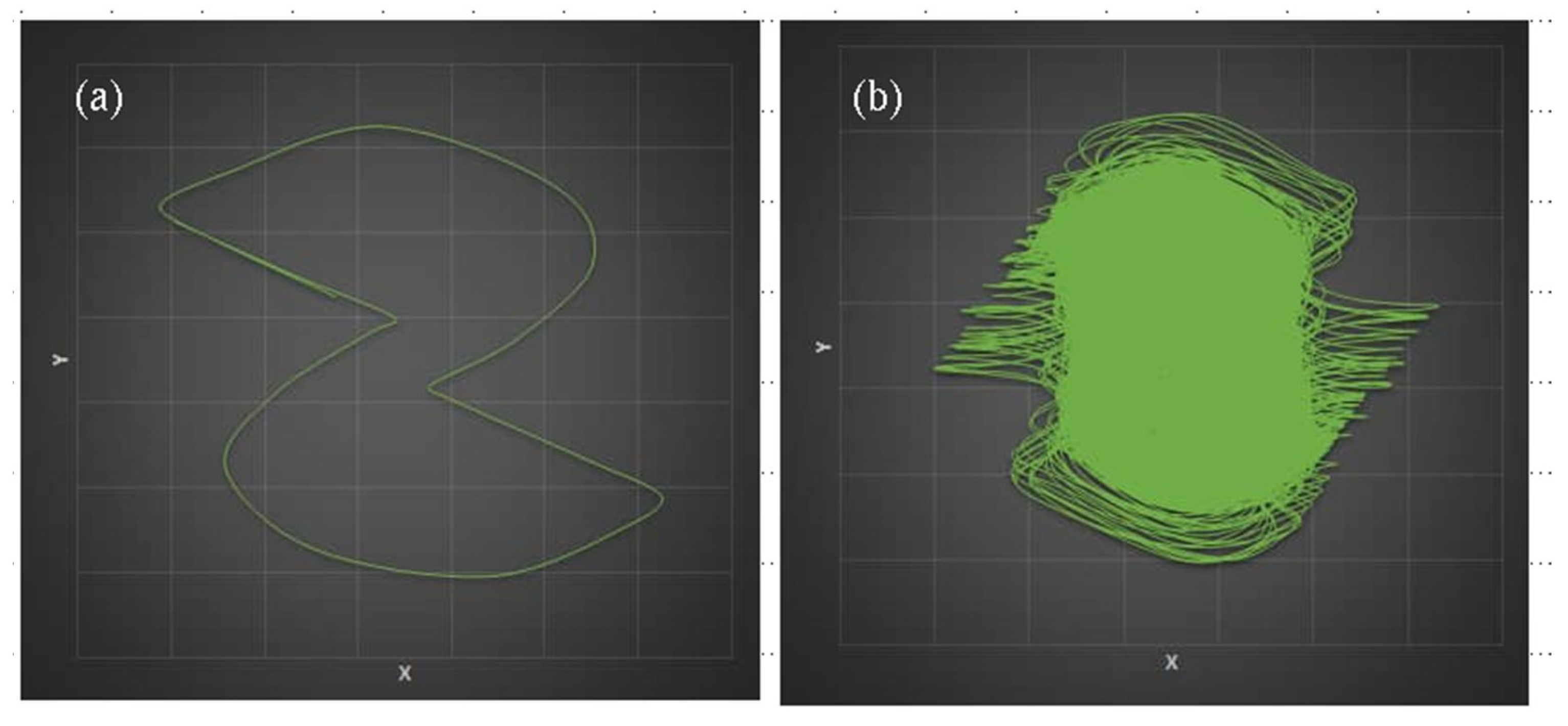
4. Microcontroller Implementation of the Proposed Tabu Learning Neuron
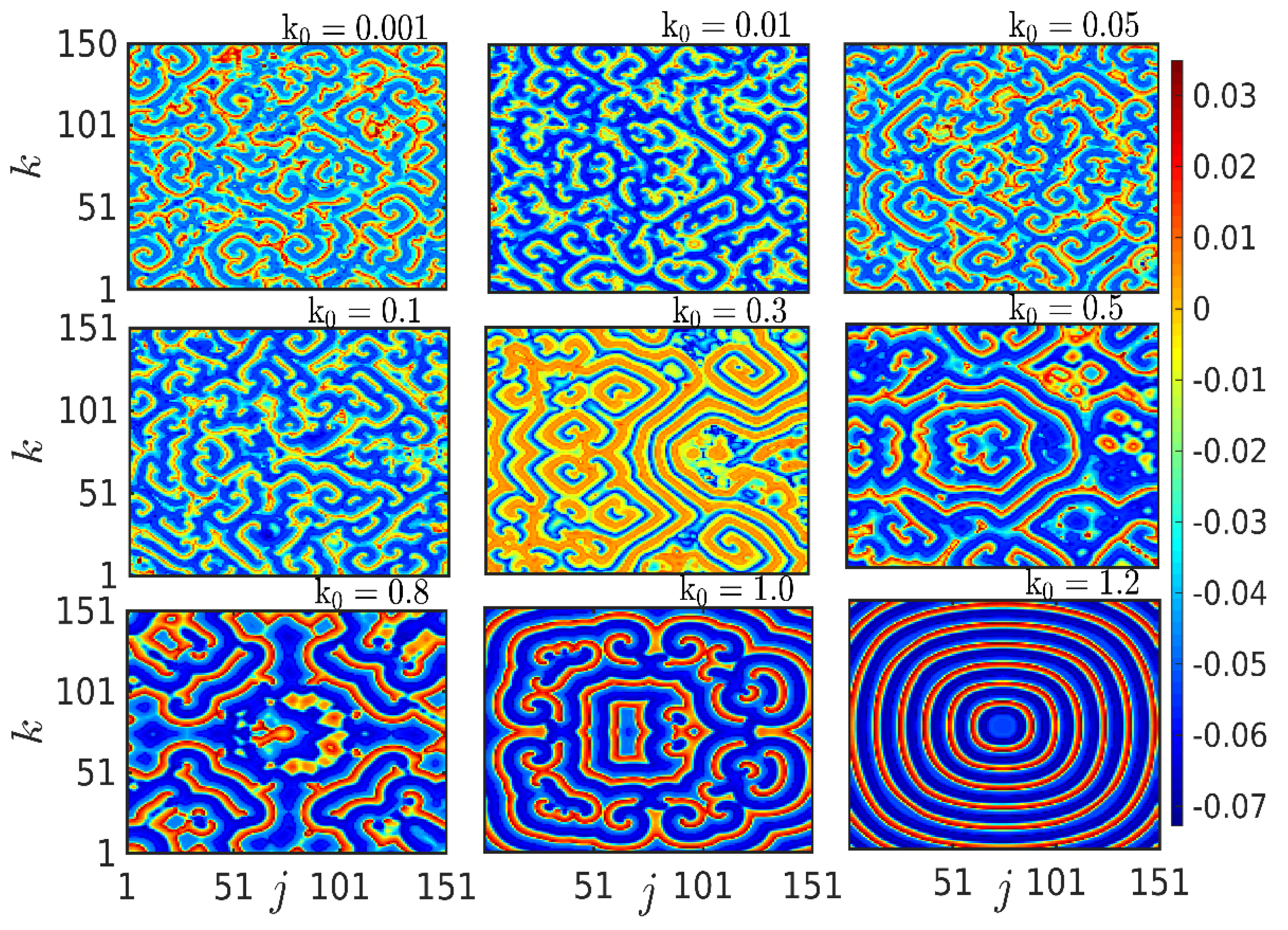
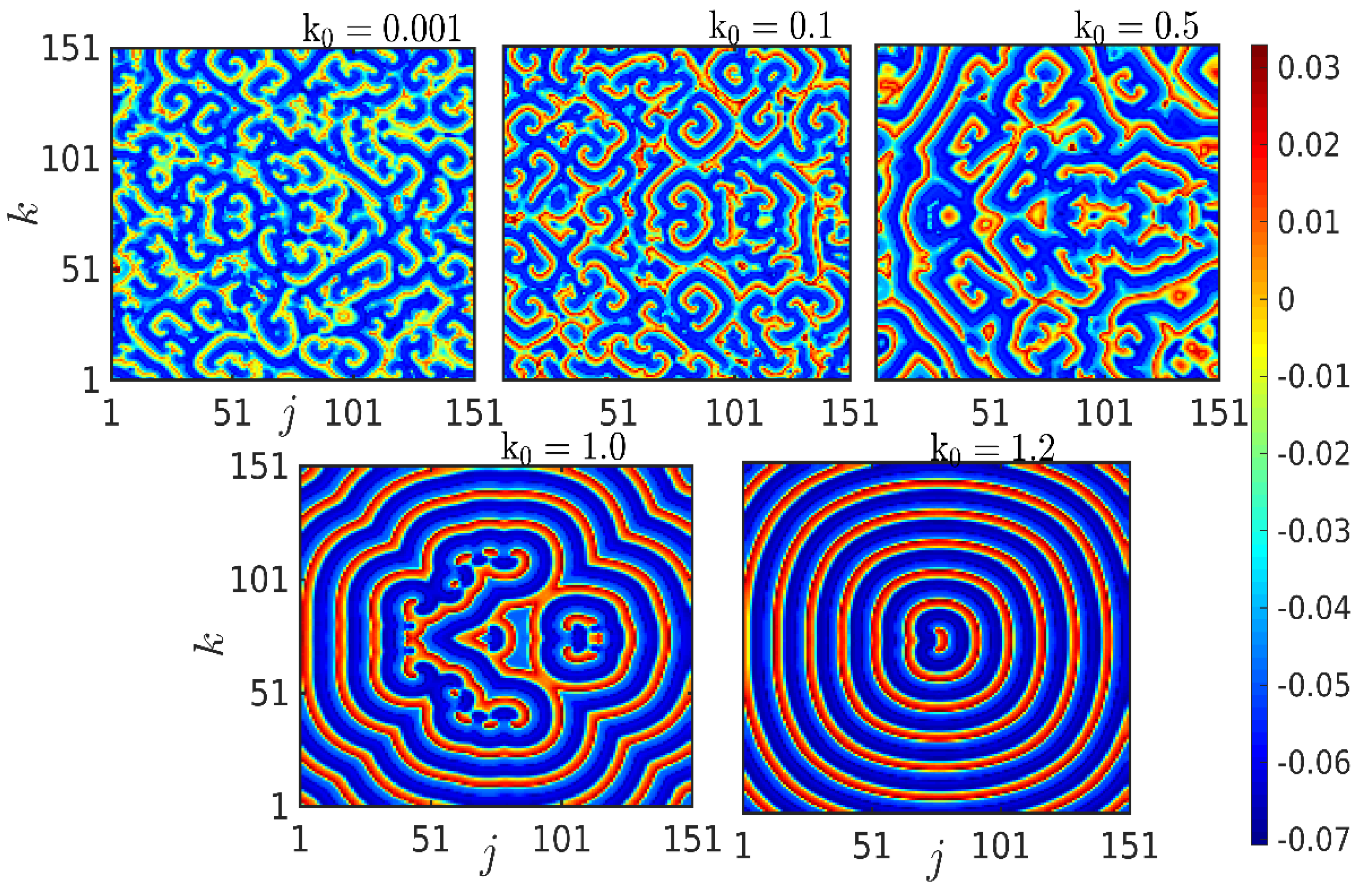
5. Network Dynamics of Tabu Learning Neurons
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Eccles, J.C. The Understanding of the Brain; McGraw-Hill: New York, NY, USA, 1973. [Google Scholar]
- Kolb, B.; Whishaw, I.Q.; Teskey, G.C. An Introduction to Brain and Behavior; Worth: New York, NY, USA, 2001; p. 608. [Google Scholar]
- Trappenberg, T. Fundamentals of Computational Neuroscience; OUP Oxford: Oxford, UK, 2009. [Google Scholar]
- Feng, J. Computational Neuroscience: A Comprehensive Approach; Chapman and Hall/CRC: Boca Raton, FL, USA, 2003. [Google Scholar]
- Long, L.; Fang, G. A Review of Biologically Plausible Neuron Models for Spiking Neural Networks. In Proceedings of the AIAA Infotech@Aerospace 2010, Atlanta, GA, USA, 20–22 April 2010. [Google Scholar]
- Ma, J.; Tang, J. A review for dynamics in neuron and neuronal network. Nonlinear Dyn. 2017, 89, 1569–1578. [Google Scholar] [CrossRef]
- Izhikevich, E.M. Neural excitability, spiking and bursting. Int. J. Bifurc. Chaos 2000, 10, 1171–1266. [Google Scholar] [CrossRef] [Green Version]
- Gu, H.; Xiao, W. Difference Between Intermittent Chaotic Bursting and Spiking of Neural Firing Patterns. Int. J. Bifurc. Chaos 2014, 24, 1450082. [Google Scholar] [CrossRef]
- Sathiyadevi, K.; Chandrasekar, V.K.; Senthilkumar, D.V.; Lakshmanan, M. Imperfect Amplitude Mediated Chimera States in a Nonlocally Coupled Network. Front. Appl. Math. Stat. 2018, 4, 58. [Google Scholar] [CrossRef]
- Premraj, D.; Suresh, K.; Banerjee, T.; Thamilmaran, K. Bifurcation delay in a network of locally coupled slow-fast systems. Phys. Rev. E 2018, 98, 22206. [Google Scholar] [CrossRef]
- Premraj, D.; Suresh, K.; Banerjee, T.; Thamilmaran, K. Control of bifurcation-delay of slow passage effect by delayed self-feedback. Chaos Interdiscip. J. Nonlinear Sci. 2017, 27, 13104. [Google Scholar] [CrossRef]
- Sathiyadevi, K.; Gowthaman, I.; Senthilkumar, D.V.; Chandrasekar, V.K. Aging transition in the absence of inactive oscillators. Chaos Interdiscip. J. Nonlinear Sci. 2019, 29, 123117. [Google Scholar] [CrossRef] [Green Version]
- Ponrasu, K.; Sathiyadevi, K.; Chandrasekar, V.K.; Lakshmanan, M. Conjugate coupling-induced symmetry breaking and quenched oscillations. Eur. Lett. 2018, 124, 20007. [Google Scholar] [CrossRef] [Green Version]
- Beyer, D.A.; Ogier, R.G. Tabu learning: A neural network search method for solving nonconvex optimization problems. In Proceedings of the 1991 IEEE International Joint Conference on Neural Networks, Singapore, 18–21 November 1991; IEEE: Piscataway, NJ, USA, 2019; pp. 953–961. [Google Scholar] [CrossRef]
- Li, C.; Chen, G.; Liao, X.; Yu, J. Hopf bifurcation and chaos in tabu learning neuron models. Int. J. Bifurc. Chaos 2005, 15, 2633–2642. [Google Scholar] [CrossRef]
- Zhou, X.; Wu, Y.; Li, Y.; Ye, Y. Hopf Bifurcation Analysis on a Tabu Learning Single Neuron Model in the Frequency Domain. In Proceedings of the 2006 International Conference on Communications, Circuits and Systems, Guilin, China, 25–28 June 2006; pp. 2042–2045. [Google Scholar] [CrossRef]
- Xiao, M.; Cao, J. Bifurcation analysis on a discrete-time tabu learning model. J. Comput. Appl. Math. 2008, 220, 725–738. [Google Scholar] [CrossRef] [Green Version]
- Li, Y. Hopf Bifurcation Analysis in a Tabu Learning Neuron Model with Two Delays. ISRN Appl. Math. 2011, 2011, 1–6. [Google Scholar] [CrossRef] [Green Version]
- Bao, B.; Hou, L.; Zhu, Y.; Wu, H.; Chen, M. Bifurcation analysis and circuit implementation for a tabu learning neuron model. AEU—Int. J. Electron. Commun. 2020, 121, 153235. [Google Scholar] [CrossRef]
- Zhu, D.; Hou, L.; Chen, M.; Bao, B. FPGA-based experiments for demonstrating bi-stability in tabu learning neuron model. Circuit World 2020, 47, 194–205. [Google Scholar] [CrossRef]
- Doubla, I.S.; Njitacke, Z.T.; Ekonde, S.; Tsafack, N.; Nkapkop, J.D.D.; Kengne, J. Multistability and circuit im-plementation of tabu learning two-neuron model: Application to secure biomedical images in IoMT. Neural Comput. Appl. 2021, 33, 14945–14973. [Google Scholar] [CrossRef] [PubMed]
- Bini, D.; Cherubini, C.; Filippi, S.; Gizzi, A.; Ricci, P.E. On spiral waves arising in natural systems. Commun. Comput. Phys. 2010, 8, 610. [Google Scholar] [CrossRef]
- Gerisch, G. Periodische Signale steuern die Musterbildung in Zellverbänden. Naturwissenschaften 1971, 58, 430–438. [Google Scholar] [CrossRef]
- Sawai, S.; Thomason, P.A.; Cox, E.C. An autoregulatory circuit for long-range self-organization in Dictyostelium cell populations. Nature 2005, 433, 323–326. [Google Scholar] [CrossRef]
- Zykov, V.S. Spiral wave initiation in excitable media. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2018, 376, 20170379. [Google Scholar] [CrossRef]
- Schiff, S.J.; Huang, X.; Wu, J.Y. Dynamical evolution of spatiotemporal patterns in mammalian middle cortex. Phys. Rev. Lett. 2007, 98, 178102. [Google Scholar] [CrossRef] [Green Version]
- Huang, X.; Xu, W.; Liang, J.; Takagaki, K.; Gao, X.; Wu, J.-Y. Spiral Wave Dynamics in Neocortex. Neuron 2010, 68, 978–990. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Huang, X.; Troy, W.C.; Yang, Q.; Ma, H.; Laing, C.; Schiff, S.J.; Wu, J.-Y. Spiral Waves in Disinhibited Mammalian Neocortex. J. Neurosci. 2004, 24, 9897–9902. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Prechtl, J.C.; Cohen, L.B.; Pesaran, B.; Mitra, P.P.; Kleinfeld, D. Visual stimuli induce waves of electrical activity in turtle cortex. Proc. Natl. Acad. Sci. USA 1997, 94, 7621–7626. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Prechtl, J.C.; Bullock, T.H.; Kleinfeld, D. Direct evidence for local oscillatory current sources and intracortical phase gradients in turtle visual cortex. Proc. Natl. Acad. Sci. USA 2000, 97, 877–882. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yu, Y.; Santos, L.M.; Mattiace, L.A.; Costa, M.L.; Ferreira, L.C.; Benabou, K.; Kim, A.H.; Abrahams, J.; Bennett, M.V.L.; Rozental, R. Reentrant spiral waves of spreading depression cause macular degeneration in hypoglycemic chicken retina. Proc. Natl. Acad. Sci. USA 2012, 109, 2585–2589. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Keener, J.P.; Tyson, J.J. Spiral waves in the Belousov-Zhabotinskii reaction. Phys. D Nonlinear Phenom. 1986, 21, 307–324. [Google Scholar] [CrossRef]
- Milton, J.; Chu, P.; Cowan, J. Spiral waves in integrate-and-fire neural networks. Adv. Neural Inf. Process. Syst. 1992, 5, 1001–1006. [Google Scholar]
- Ma, J.; Hu, B.; Wang, C.; Jin, W. Simulating the formation of spiral wave in the neuronal system. Nonlinear Dyn. 2013, 73, 73–83. [Google Scholar] [CrossRef]
- Rajagopal, K.; Ramadoss, J.; He, S.; Duraisamy, P.; Karthikeyan, A. Obstacle induced spiral waves in a multilayered Huber-Braun (HB) neuron model. In Cognitive Neurodynamics; Springer: Berlin/Heidelberg, Germany, 2022; pp. 1–15. [Google Scholar] [CrossRef]
- Rajagopal, K.; Karthikeyan, A. Spiral waves and their characterization through spatioperiod and spatioenergy under distinct excitable media. Chaos Solitons Fractals 2022, 158, 112105. [Google Scholar] [CrossRef]
- Bersini, H.; Sener, P. The connections between the frustrated chaos and the intermittency chaos in small Hopfield networks. Neural Networks 2002, 15, 1197–1204. [Google Scholar] [CrossRef]
- Rajagopal, K.; Nazarimehr, F.; Bahramian, A.; Jafari, S. A chaotic system with equilibria located on a line and its fractional-order form. In Fractional-Order Design; Academic Press: Cambridge, MA, USA, 2022; pp. 35–62. [Google Scholar]
- Feng, Y.; Rajagopal, K.; Khalaf, A.J.M.; Alsaadi, F.E.; Alsaadi, F.E.; Pham, V.T. A new hidden attractor hyper-chaotic memristor oscillator with a line of equilibria. Eur. Phys. J. Spec. Top. 2020, 229, 1279–1288. [Google Scholar] [CrossRef]
- Nazarimehr, F.; Rajagopal, K.; Kengne, J.; Jafari, S.; Pham, V.-T. A new four-dimensional system containing chaotic or hyper-chaotic attractors with no equilibrium, a line of equilibria and unstable equilibria. Chaos Solitons Fractals 2018, 111, 108–118. [Google Scholar] [CrossRef]
- Rajagopal, K.; Bayani, A.; Khalaf, A.J.M.; Namazi, H.; Jafari, S.; Pham, V.-T. A no-equilibrium memristive system with four-wing hyperchaotic attractor. AEU—Int. J. Electron. Commun. 2018, 95, 207–215. [Google Scholar] [CrossRef]
- Rajagopal, K.; Akgul, A.; Jafari, S.; Aricioglu, B. A chaotic memcapacitor oscillator with two unstable equilibriums and its fractional form with engineering applications. Nonlinear Dyn. 2017, 91, 957–974. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Values of k0 | Eigenvalues | Associated Stability |
|---|---|---|
| 0.1 | Unstable focus | |
| 0.4 | Unstable focus | |
| 0.8 | Unstable focus | |
| 1.2 | Unstable focus |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sriram, B.; Tabekoueng, Z.N.; Karthikeyan, A.; Rajagopal, K. Emerging Spiral Waves and Coexisting Attractors in Memductance-Based Tabu Learning Neurons. Electronics 2022, 11, 3685. https://doi.org/10.3390/electronics11223685
Sriram B, Tabekoueng ZN, Karthikeyan A, Rajagopal K. Emerging Spiral Waves and Coexisting Attractors in Memductance-Based Tabu Learning Neurons. Electronics. 2022; 11(22):3685. https://doi.org/10.3390/electronics11223685
Chicago/Turabian StyleSriram, Balakrishnan, Zeric Njitacke Tabekoueng, Anitha Karthikeyan, and Karthikeyan Rajagopal. 2022. "Emerging Spiral Waves and Coexisting Attractors in Memductance-Based Tabu Learning Neurons" Electronics 11, no. 22: 3685. https://doi.org/10.3390/electronics11223685