1. Introduction
Using sensors built into intelligent wearable devices (e.g., mobile smartphones and smart home appliances) to track and identify human activities has been used in a variety of fields, such as security and surveillance [
1], smart homes [
2], healthcare [
3], and human–computer interaction [
4]. Human Activity Recognition (HAR) collects raw signals characterizing the surrounding environment through various sensors on individuals, either independent or embedded. Based on the features retrieved from raw sensor traces, HAR traditionally uses machine learning (ML) models to recognize the fundamental activity. The most commonly used sensors include wearable inertial sensors (typically sense to tri-axial acceleration (3D-ACC) and tri-axial angular velocity) [
5], GPS [
6], cameras, or image-based sensors [
1]. Each of these sensor modalities has its particular strengths and weaknesses. For example, a 3D-ACC attached to the user’s body consumes little power and reliably captures motion data despite its sensitivity to position and orientation. Location trajectories captured by GPS can show location-based activities (e.g., shopping in a mall), but if buildings in crowded metropolitan locations obscure them, there is a possibility that GPS will not function appropriately. On the other side, the vision-based sensor can immediately record the types of behaviors being performed, posing significant privacy concerns. Researchers have proposed combining different types of sensors and using new sensors, such as Bluetooth and Wi-Fi [
7], to increase predictive performance because no one sensor excels in all possible application cases.
A photoplethysmography (PPG) sensor is rapidly becoming one of the most popular sensors in modern smartwatches and wristbands. PPG signals, optically obtained plethysmographs, can be applied to monitor variations in the amount of blood flowing through the microvascular system [
8]. In other words, it estimates the amount of blood flow by transmitting light into the body and determining how much of that light is reflected. In this way, heart rate is measured. Unlike electrocardiography (ECG), which requires sticky metal electrodes to be placed on the skin of the body to monitor the electrical activity of the heart and muscles [
9], monitoring using PPG can be conducted on the outside of the body at the periphery, which requires less intrusive physical contact. Consequently, PPG sensors are being utilized more frequently in personal fitness gadgets such as smartwatches and wristbands to monitor the user’s heart rate.
Among smartphones and smartwatches, built-in 3D-ACCs are the most common sensors that can be used for activity monitoring. As smartphones and smartwatches continue to grow in popularity, the methods of data fusion utilized by PPG and acceleration data can directly provide accurate and reliable human activity information on these devices [
10,
11]. In contrast to inertial measurement units (IMU), which commonly include accelerometers and gyroscopes, PPG sensors are not typically employed for HAR classification because they are not intended to collect motion data. However, using a PPG sensor for HAR presents several advantages [
12]: (i) wearables technology is becoming increasingly commonplace, and these devices nearly invariably incorporate a PPG sensor. Since there is no additional expense incurred by the user of a PPG-enabled smartwatch or wristwatch, it makes perfect sense to make use of the information that they can supply; (ii) in situations where other HAR sensors are not accessible, the PPG sensor can be used alone—alternatively, it can be combined with the other sensors to improve recognition performance; and (iii) this sensor can be used to monitor various physiological parameters (such as blood volume and rate of the heart) in one solution. For these reasons, we also employed the PPG signal to predict human activities.
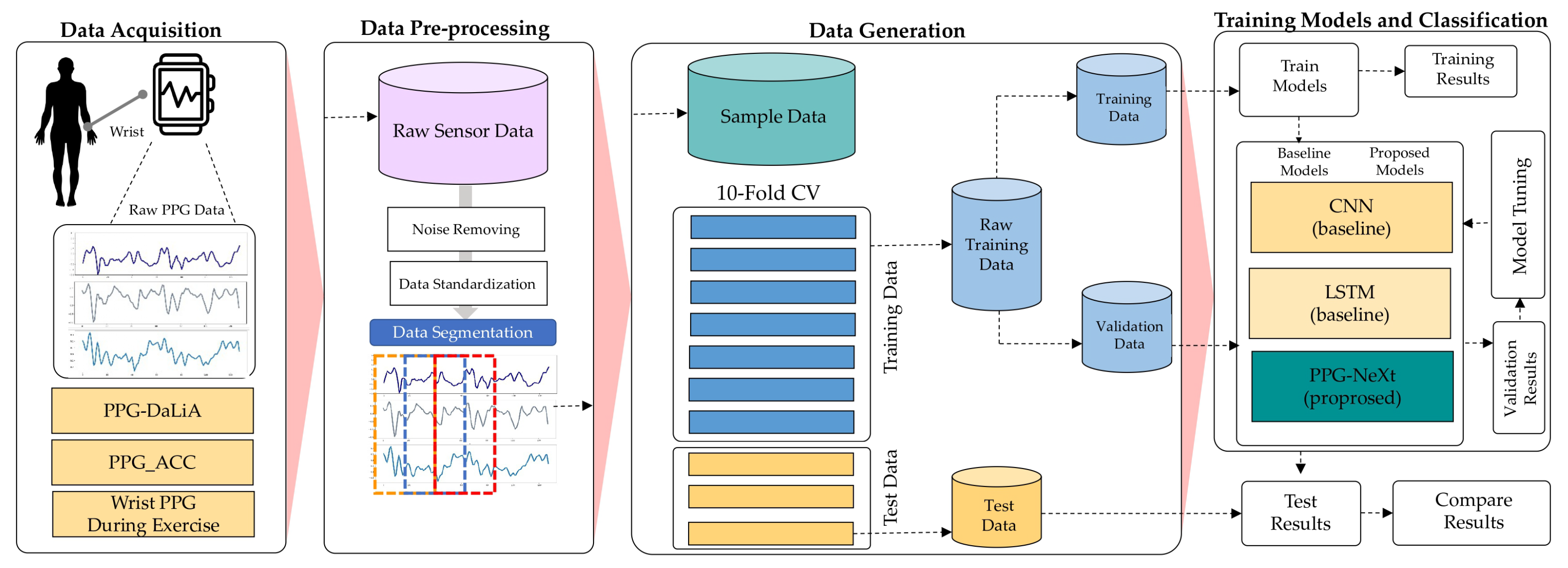
This work studies physical activity recognition using biosignals such as PPG captured from smart wearable devices. To achieve this goal, we first introduce a deep residual neural network for PPG-based HAR called PPG-NeXt. For performance evaluation, we used three public PPG benchmark datasets (PPG-DaLiA, PPG-ACC, and Wrist PPG During Exercise). The following is a condensed summary of the most important contributions that can be drawn from this research:
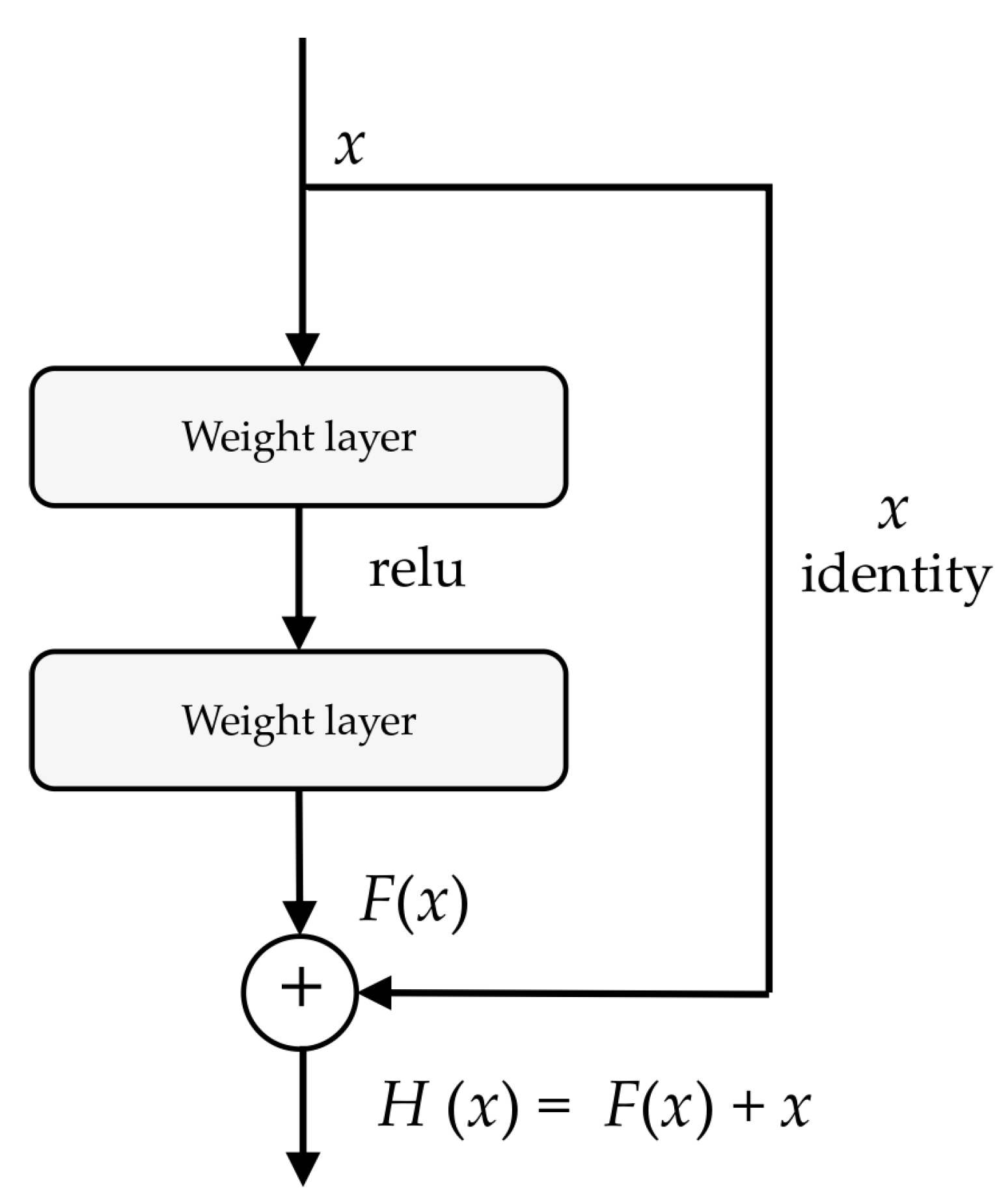
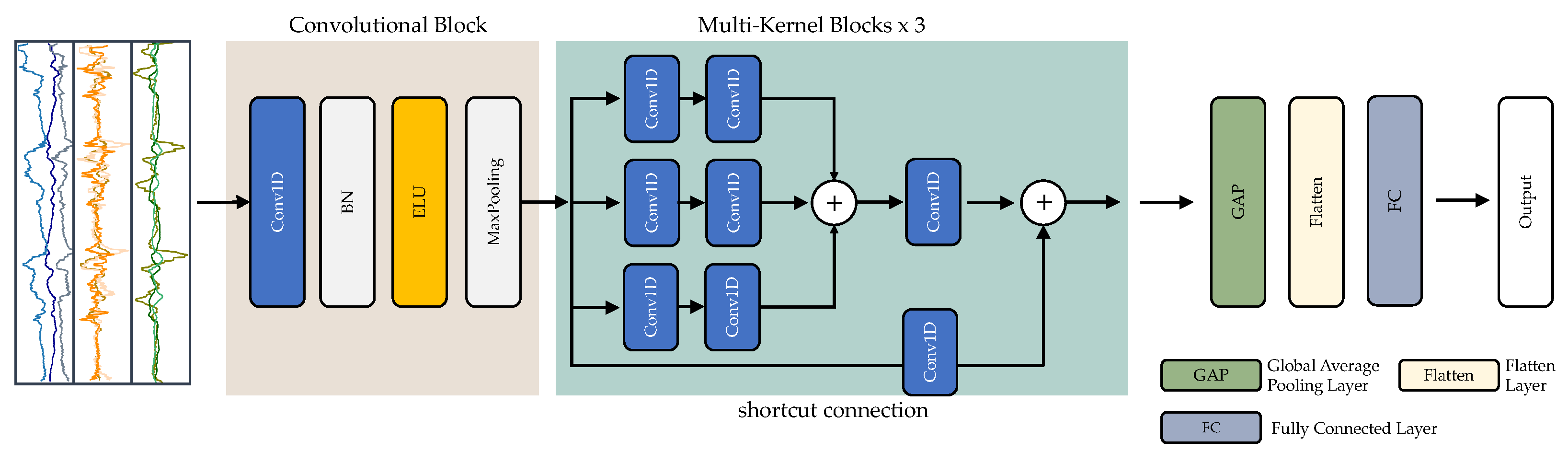
Using biosignals from wearable sensors, a deep residual network known as PPG-NeXt was developed for HAR. Multiple filter sizes applied to the input at the same level were used in developing the PPG-NeXt multi-kernel block. As a result, it can capture information on various scales within the current data segment. The CNN block uses the power of the 1 × 1 convolution operation in addition to the multi-slide filters to cluster information across the channel.
Validation of the PPG-NeXt model is performed on three publicly available benchmark datasets. PPG-DaLiA, PPG-ACC, and Wrist PPG During Exercise achieved overall accuracies of 99.16%, 99.23%, and 99.17%, respectively. According to the results, the proposed model outperformed other innovative HAR approaches using PPG data from wearable sensors.
The Deep Convolutional Neural Network (CNN), Stacked Long Short-Term Memory (LSTM), CNN-LSTM, CNN-Gated recurrent units (GRU), and inception-based iSPLInception benchmark deep learning (DL) models from the literature were considered and used with the standard public datasets to validate the proposed approach. The proposed PGG-NeXt model performed better than all the benchmark models when the performance of the models was evaluated using conventional evaluation criteria (accuracy, recall, precision, and F1-score).
The remaining components of the study are broken down into the following sections:
Section 2 examines related literature on biosignal-based HAR, DL approaches for HAR, and existing problems.
Section 3 presents this paper’s hybrid deep residual learning framework for physical activity recognition.
Section 4 outlines the experimental result and describes the context in which the experiments were conducted.
Section 5 provides a discussion of the study results reported in this section.
Section 6 contains the summary and suggestions for challenging future research.
5. Discussion
5.1. Impact of Sampling Frequencies on Different Dataset
Based on the experimental findings in
Table 4,
Table 5 and
Table 6, the averaged accuracies of PPG-NeXt employing acceleration data with higher frequencies are superior to those of our suggested model using acceleration data with lower frequencies. When the sampling frequency was increased, sensor data comprised more data points per sensor, and this large number of data points offered more insight into the motion [
44]. The findings also show that the sampling rate of the PPG signal remained the same as the PPG-NeXt model’s average accuracy. The point permits the sampling rate of the PPG signal to be reduced to low-frequency levels without making significant HAR effects.
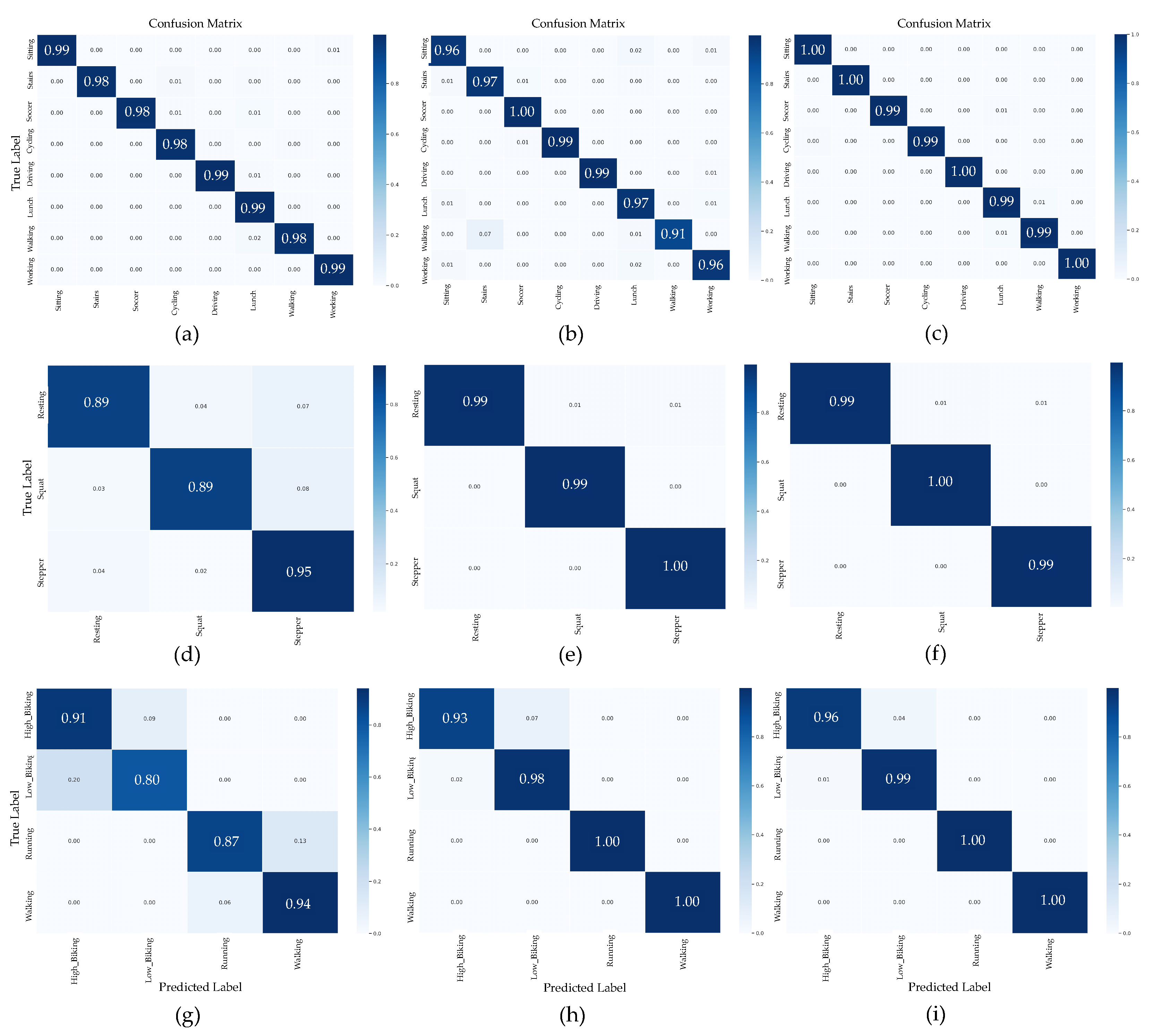
5.2. Impact of Activity Complexity
Table 7 provides the F1-score of the PPG-NeXt trained on several datasets (PPG-DaLiA, PPG ACC, and Wrist PPG During Exercise). Each dataset includes various human behaviors. The majority of the PPG-DaLiA dataset’s eight daily living tasks are straightforward. The PPG ACC consists of three exercise-related tasks: resting, squatting, and walking. During the exercise dataset, the four activity-related activities included in the Wrist PPG are walking, running, and cycling with high and low resistance.
5.3. Impact of Sensor Types
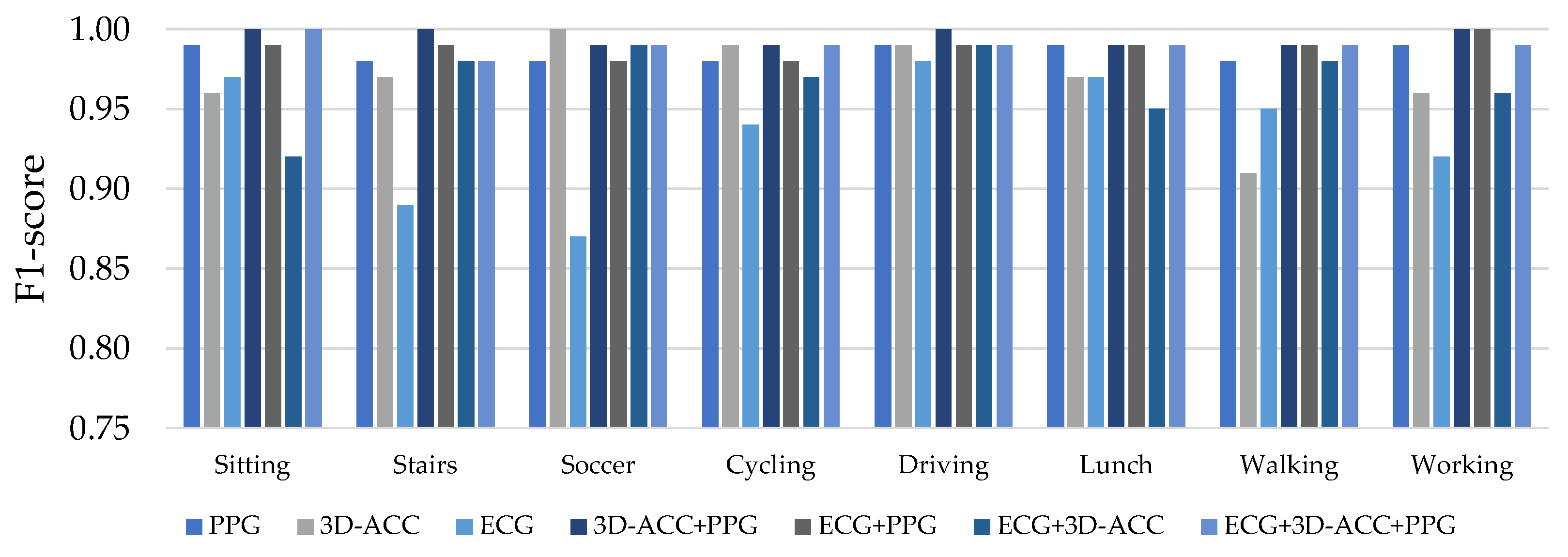
We arrange the results of PPG-DaLiA based on seven possibilities of sensor combinations, i.e., employing just one input of signal (scenarios 1, 2, and 3) and a variety of two inputs (scenarios 4, 5, and 6), including scenario 7, which involves the fusion of PPG, 3D-ACC, and ECG data. As illustrated in
Figure 6, we clarify our findings about the activity interpretation of the HAR models.
For identifying human behavior, the PPG signal surpasses the other two biosignals when just one signal source is considered. When the PPG and 3D-ACC signals are combined, the model’s performance exceeds that of the model employing just one signal source. Our findings imply that including the PPG signal in HAR solutions based primarily on the 3D-ACC might enhance the model’s effectiveness. Moreover, when considering all three signal sources, we discover that HAR efficacy is identical to when we included PPG and 3D-ACC signals. However, fusing ECG signals did not enhance the performance of the classifiers in our investigation.
5.4. Limitations and Further Directions
This study has several limitations. First, the experiment was performed with a limited sample size in a semi-controlled setting using three publicly accessible datasets, which might restrict our results’ generalizability. Second, the drawback of the PPG-NeXt model provided is the interpretability of the retrieved features. The feature matrix signifies binary numbers representing the percentage of positive values, which makes it challenging to comprehend the network’s concentration on the essential areas of signals. Despite these limitations, this study provides new insights into how to assess human behavior employing different sensing modalities than motion sensors.
So, further research will require the collection of an additional PPG dataset to acquire excellent and more generalized findings from the classification model. The dataset will include PPG data with data from other low-energy sensors on a variety of immediate and complicated actions, sample frequencies, and sensor localization.
6. Conclusions
This work introduced a deep residual network, PPG-NeXt, for physical activity recognition using PPG and wearable inertial sensor data. The proposed model was evaluated using three publicly available benchmark PPG datasets (PPG-DaLiA, PPG-ACC, and Wrist PPG During Exercise) and compared with other DL models. The results show that more than 90% of the F1-score in classification is achieved using only PPG data.
We performed a comparative analysis to evaluate the significance of the various contributions of signal sources in HAR systems. The experimental results show that the 3D-ACC is the most informative signal when the goal of the HAR system is to acquire and use a single signal source. Moreover, our results indicate that combining PPG and 3D-ACC signals increases activity recognition without significantly increasing hardware and processing costs. However, biosignals, ECGs, and PPGs can separate static and non-static activity and have a sufficiently successful level. Overall, our findings signify that combining PPG and 3D-ACC signal features could reinforce enhancing the F1-score of all activity situations. Nonetheless, the ECG signal feature has difficulty distinguishing between activities with similar motions but significantly different heart rate signatures.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}