
Resource Allocation in UAV-Enabled NOMA Networks for Enhanced Six-G Communications Systems

Abstract
:1. Introduction
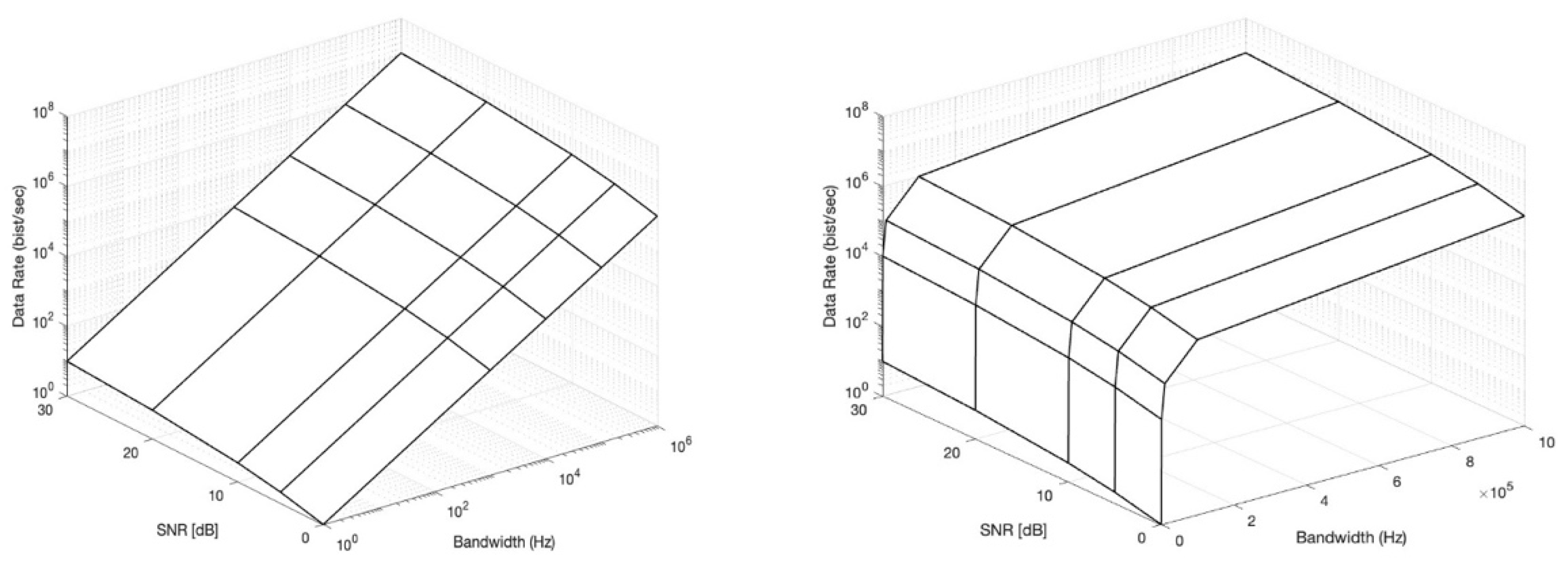
| Algorithm 1: Channel Capacity vs. Bandwidth |
| Input: BW = [1 8 × 10³ 8 × 104 8 × 105 8 × 106]; SNR_dB = [0 5 10 20 30] Start Procedure SNR = 10.^(SNR_dB/10); % SNR in linear scale For k = 1:length(SNR) C(k,:) = BW.*log2(1 + SNR(k)); %capacity End For Figure mesh(BW,SNR_dB,C); xlabel(‘Bandwidth (Hz)’); ylabel(‘SNR [dB]’) zlabel(‘Data Rate (bist/sec)’) set(gca, ‘xscale’, ‘log’) set(gca, ‘zscale’, ‘log’) End Procedure |
- Quick and versatile deployment: UAVs can be deployed swiftly and in diverse locations, making them well-suited for providing temporary or supplementary network coverage during special events, disaster recovery scenarios, or in hard-to-reach areas.
- Real-time position adjustments: UAVs can modify their positions in real-time based on user demand and network conditions, optimizing coverage areas and providing better connectivity and targeted capacity improvements where needed.
- Decreased transmission latency: As aerial base stations, UAVs can minimize the distance between users and base stations, reducing transmission latency and enhancing service quality.
- Improved spectral efficiency: UAVs can use advanced 6G technologies, such as NOMA, to boost spectral efficiency and accommodate more users within the same frequency band.
- Optimized energy consumption: UAVs can be outfitted with energy-saving technologies and intelligent power management systems to maximize energy efficiency while delivering reliable wireless services.
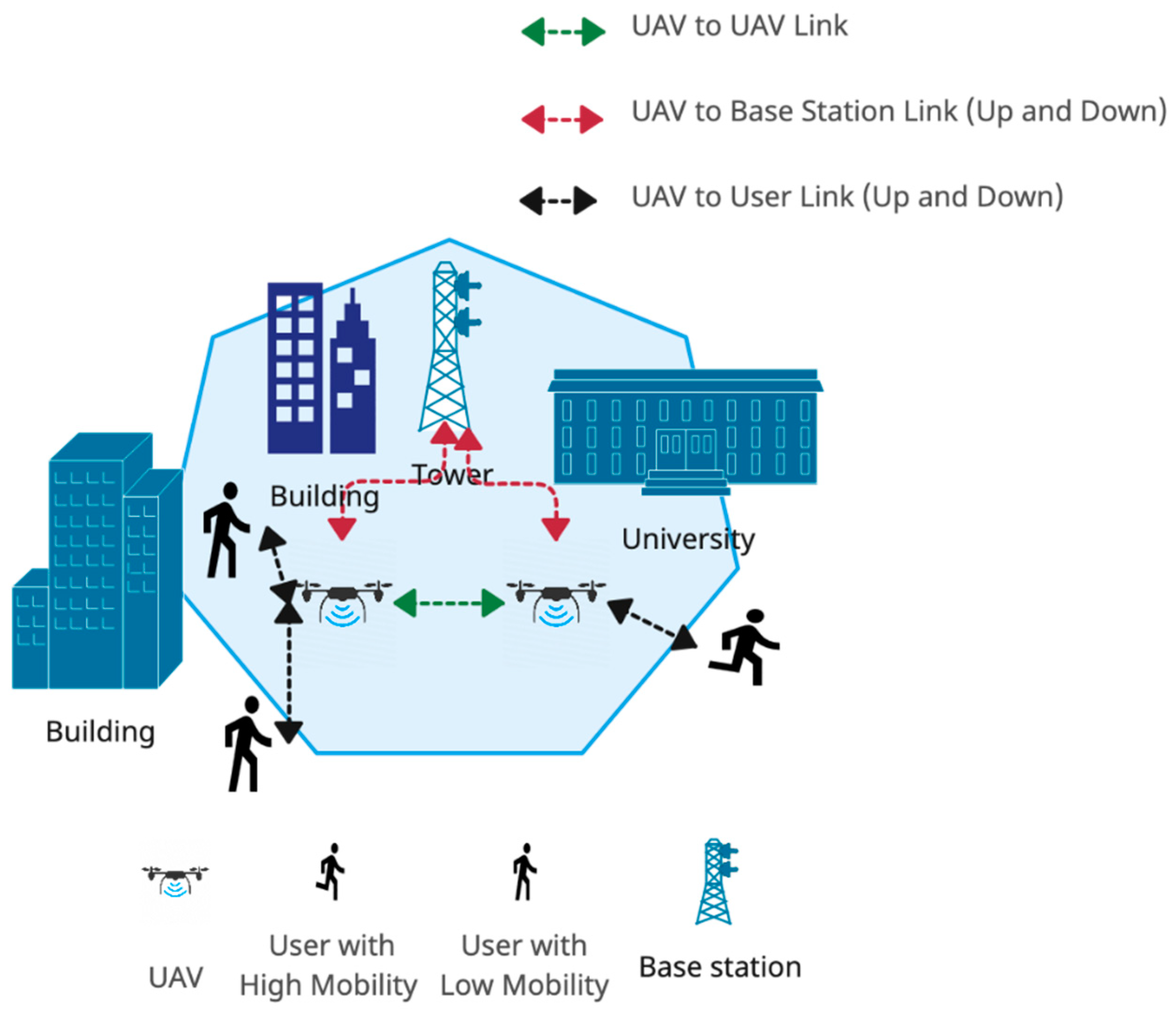
- We present a unique model for 6G wireless networks integrating UAV-mounted base stations with NOMA capabilities. This model uses UAVs to enhance network performance and reduce transmission delays.
- We propose a novel reinforcement learning approach. In this approach, a UAV, acting as a reinforcement learning agent, interacts with its environment to learn the optimal policy for maximizing its cumulative reward. The UAV makes decisions including user association, caching, and power at every time slot based on specific conditions.
- We effectively manage a large state space in our model by combining DRL with a deep neural network (DNN). This approach enables our model to handle the vast number of states arising due to the dynamic and continuous nature of the UAV’s environment.
- Our model is designed to enable continuous adaptation. The parameters of the actor and critic networks in our model are updated at every time slot, which allows the agent UAV to continuously adapt and respond to changes in the environment.
- Our model is capable of serving multiple users simultaneously from a single source, thereby significantly improving network efficiency.
- We propose a novel power distribution mechanism based on user fairness, their requirements, and quality of service (QoS) expectations.
- We eliminate the need for scheduling in NOMA, thereby reducing transmission latency—a significant improvement over existing models.
- We expand the system’s coverage area with the assistance of cooperative NOMA, offering higher spectral efficiency.
2. Literature Review
3. Methdology and Proposed Model
3.1. The Achievable Rate
3.2. Power Allocation vs. Number of Users
- : is the Rayleigh fading coefficient for the far user;
- : is the Rayleigh fading coefficient for the near user;
- : is the PA coefficient for the far user;
- : is the PA coefficient for the near user;
- : is the total transmitted power;
- : is the noise power.
3.3. Mobility
3.4. Transmission
- Air-to-Ground Model
- u is a UAV;
- g is a user s ∈ S or the ground base station (GBS);
- is the probability of LOS connection;
- is the probability of NLOS connection;
- is the path loss of the LoS channel between the UAV (u) and user (S) or ground base station (GBS);
- is the path loss of the LoS channel between the UAV (u) and user (S) or ground base station (GBS).
- B.
- Air-to-Air Model
3.5. Caching
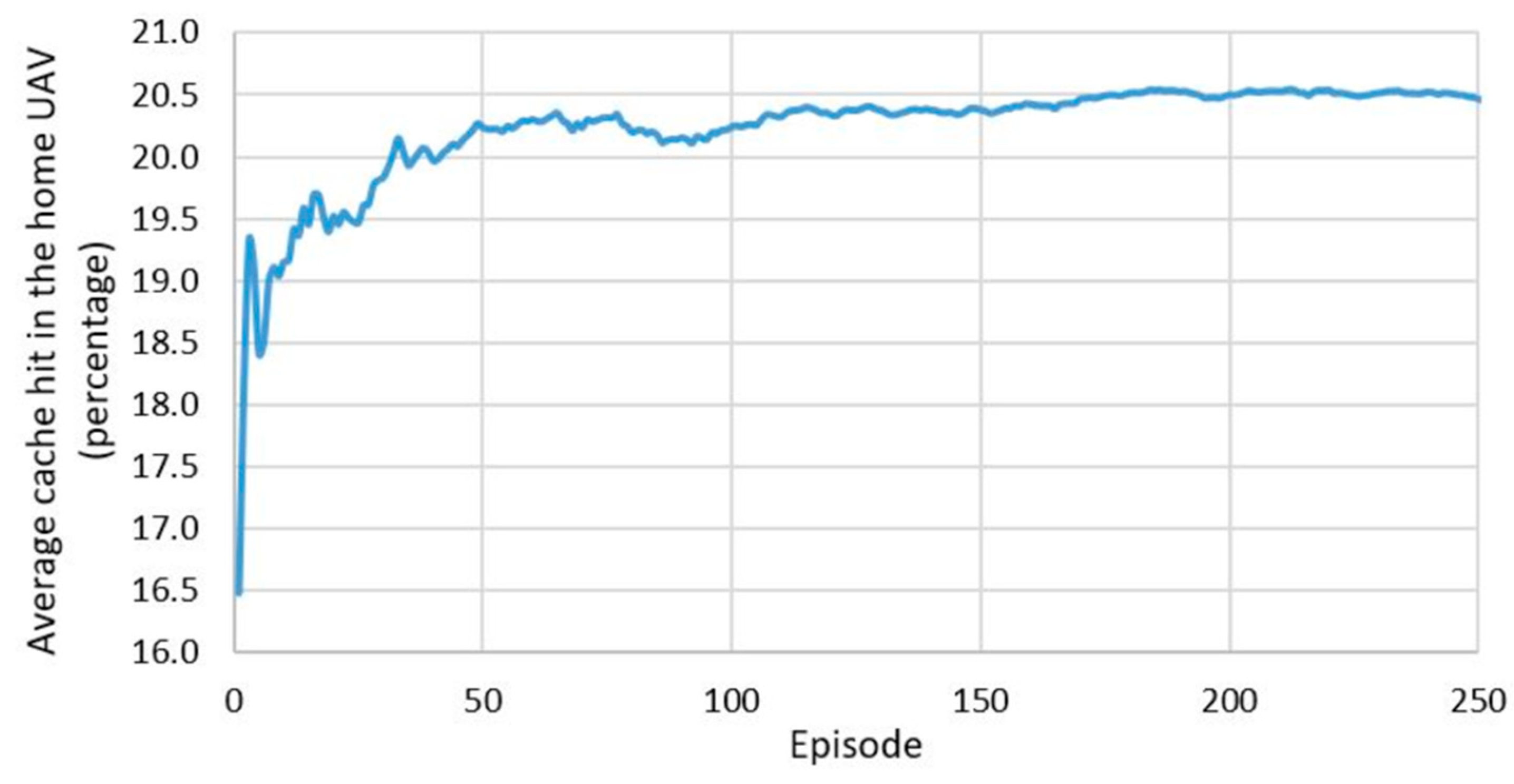
- Cache Hit at home UAV
- B
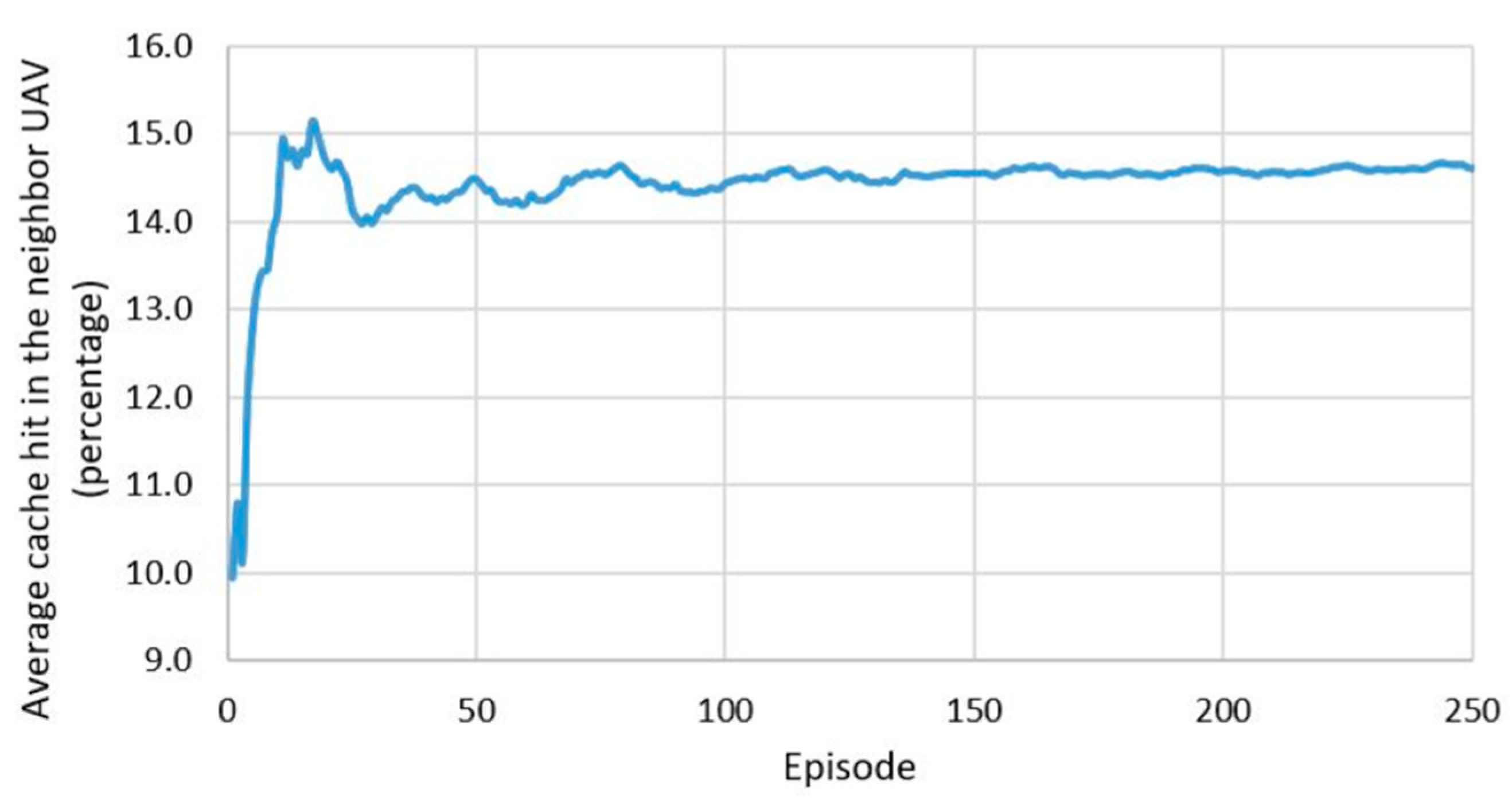
- Cache Hit at foreign UAV
- C
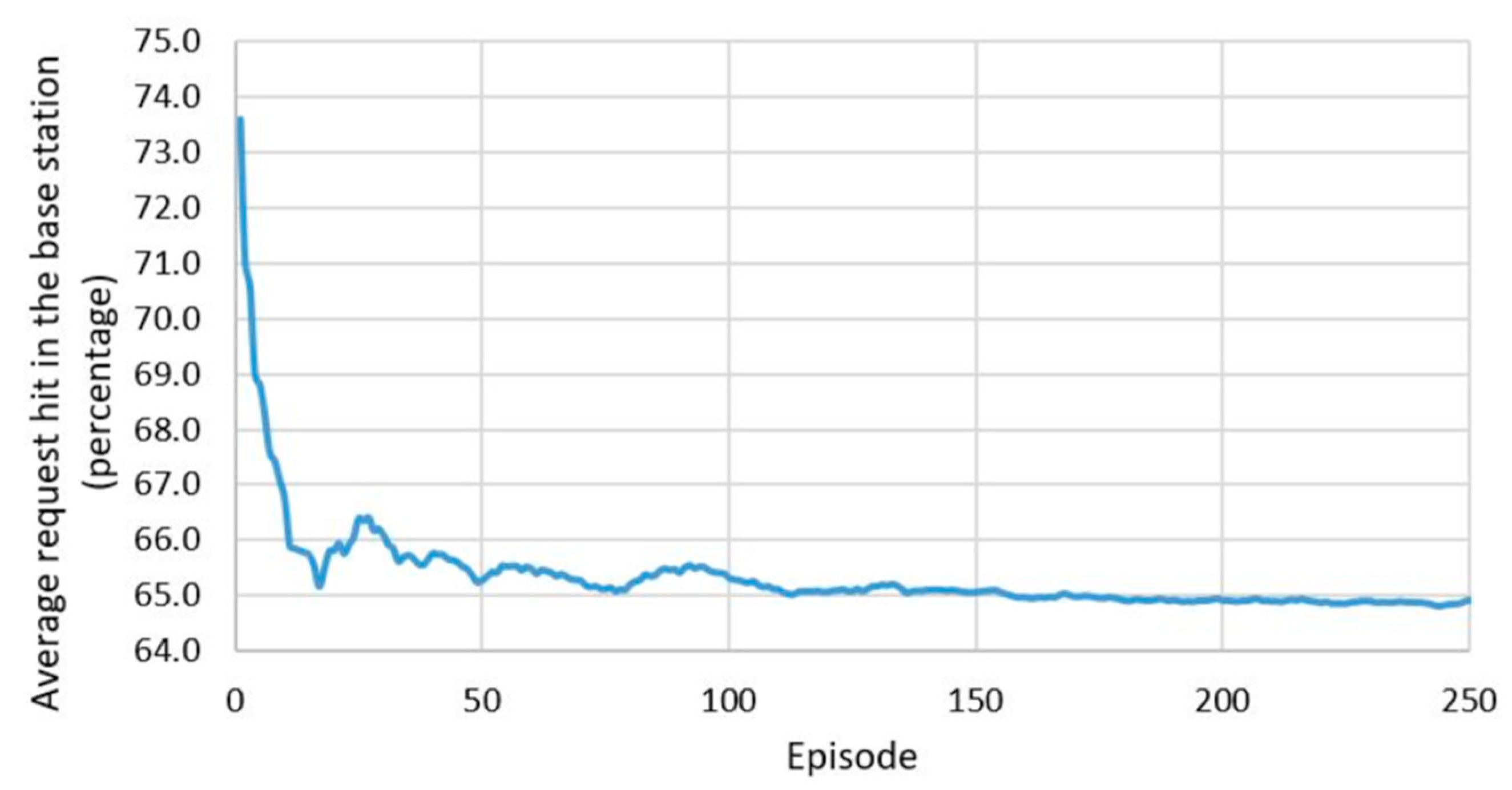
- Cache Miss at home and foreign UAV
- D
- Cache sharing to reduce transmission delay and better management of power consumption
| Algorithm 2: Cache Sharing Algorithm |
| Input: initialize BZ = 256; initialize MZ = 106; initialize as actor network parameters; as critic network parameters; randomly initialize weights ; greedy probability ; initialize the experience cache space Γ. Start Learning for episode from 1 to limit do Initialize a noise function and receive the initial state for t = 1 to T do Observe n(t) & take action j(t) = + Γ Apply j(t), obtain n(t + 1), and calculate RW(t) Save (n(t), j(t), RW(t), n(t + 1)) in MZ Randomly sample mini batch Update Γ = + ( − )/exp(−ϵ t); until maximum iterations; End for End Learning |
4. Experimental Results
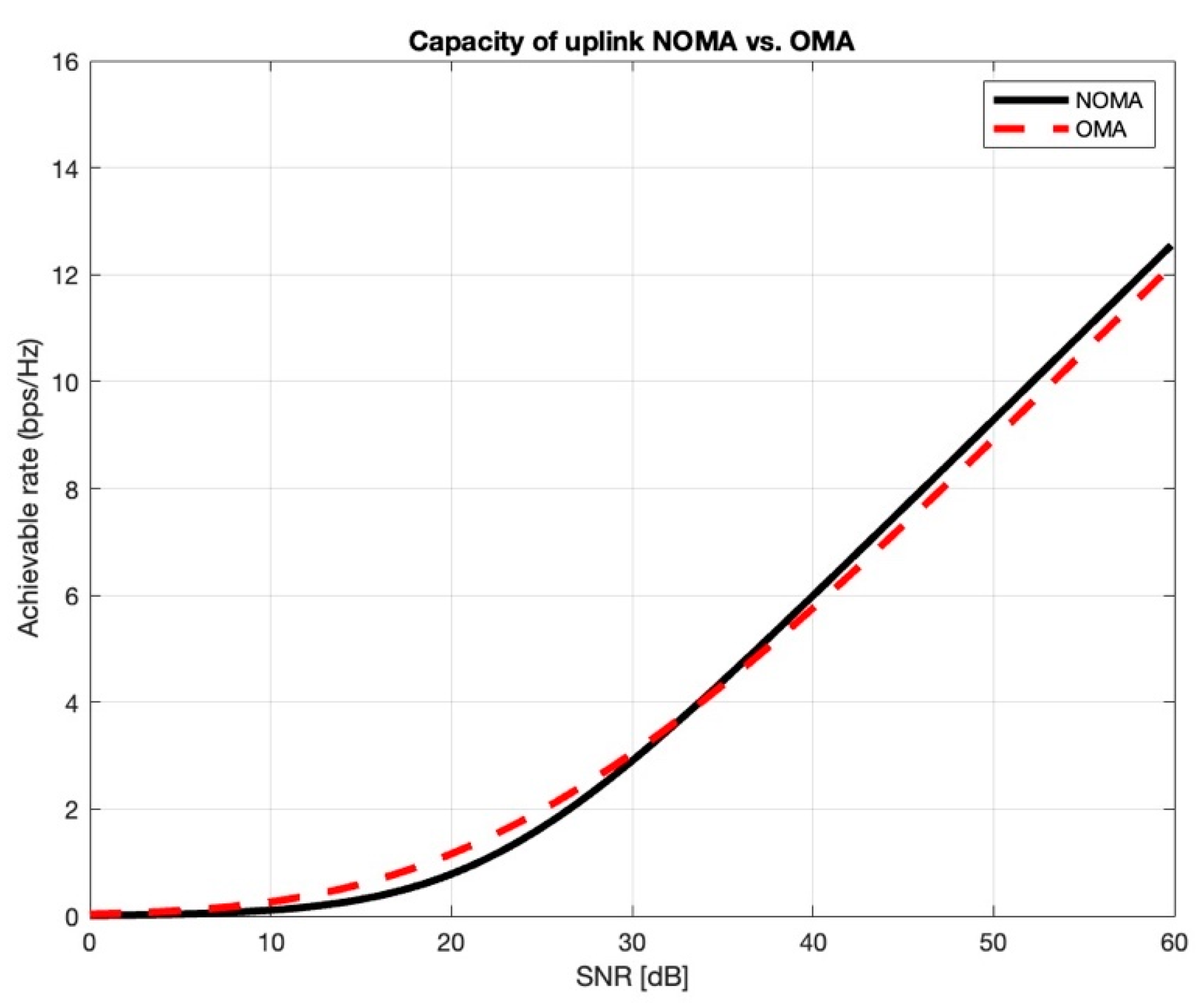
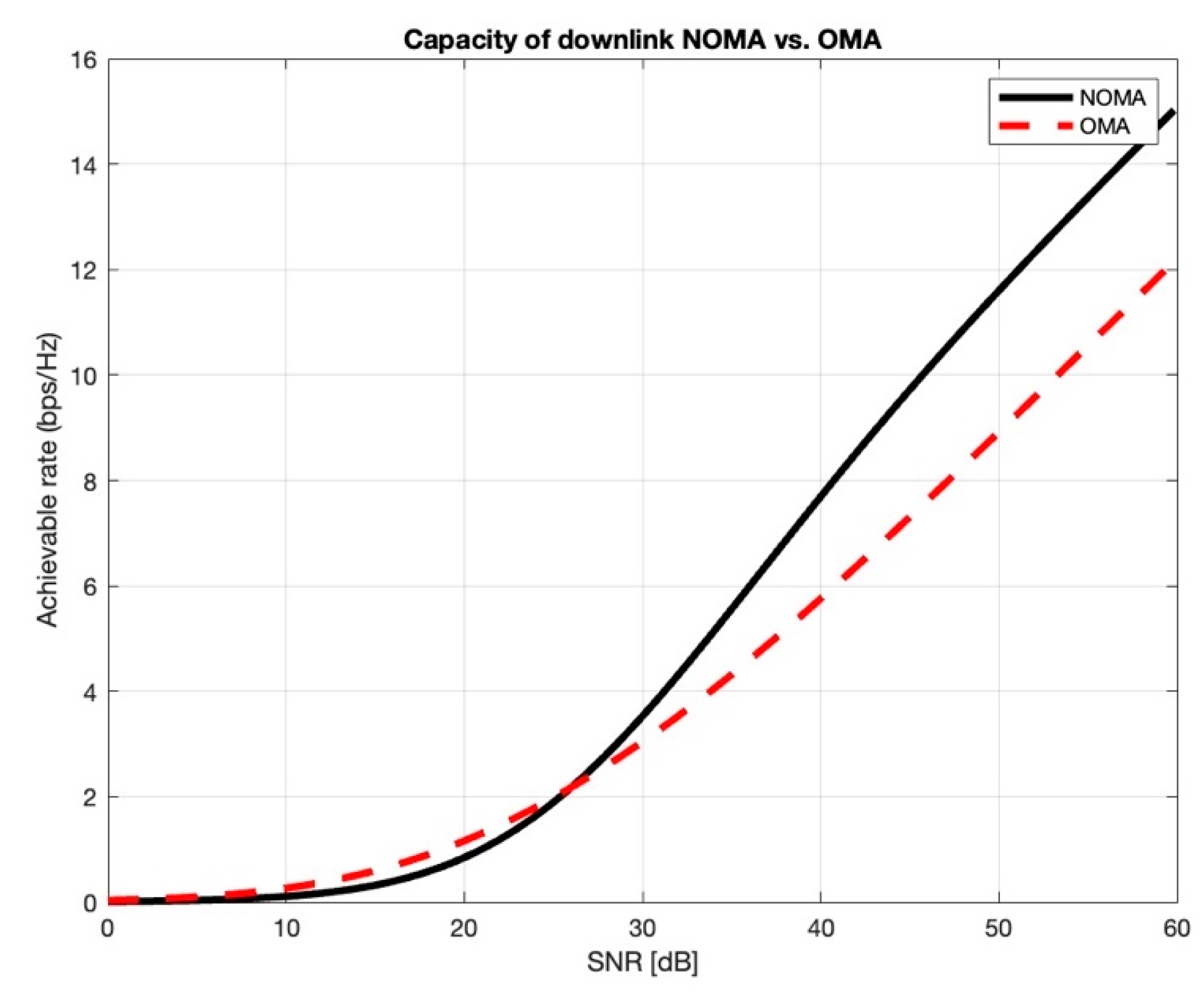
4.1. Achievable Rate vs. SNR Results
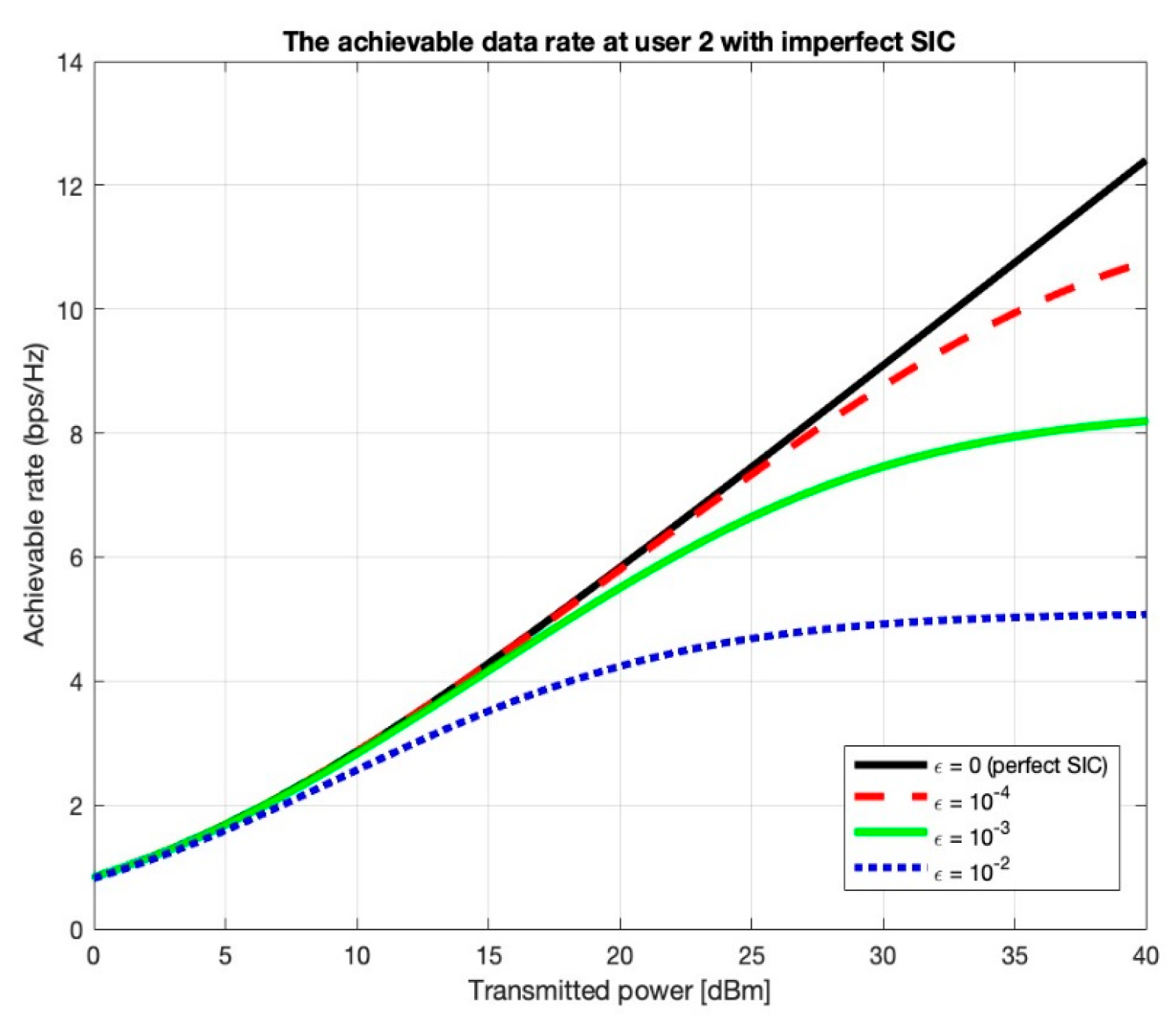
4.2. Achievable Rate vs. Transmit Power Results
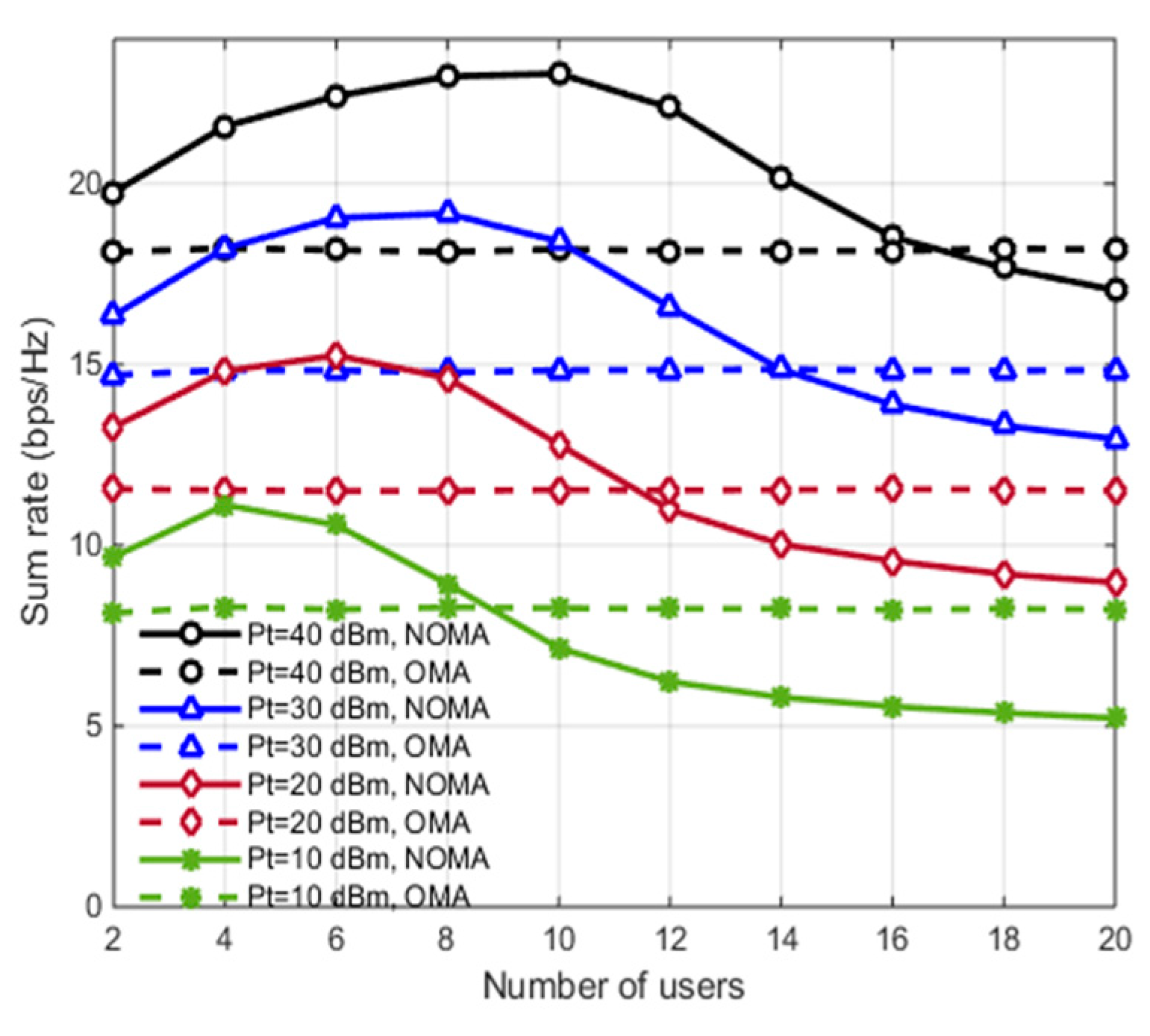
4.3. Sum Rate vs. Number of Users Results
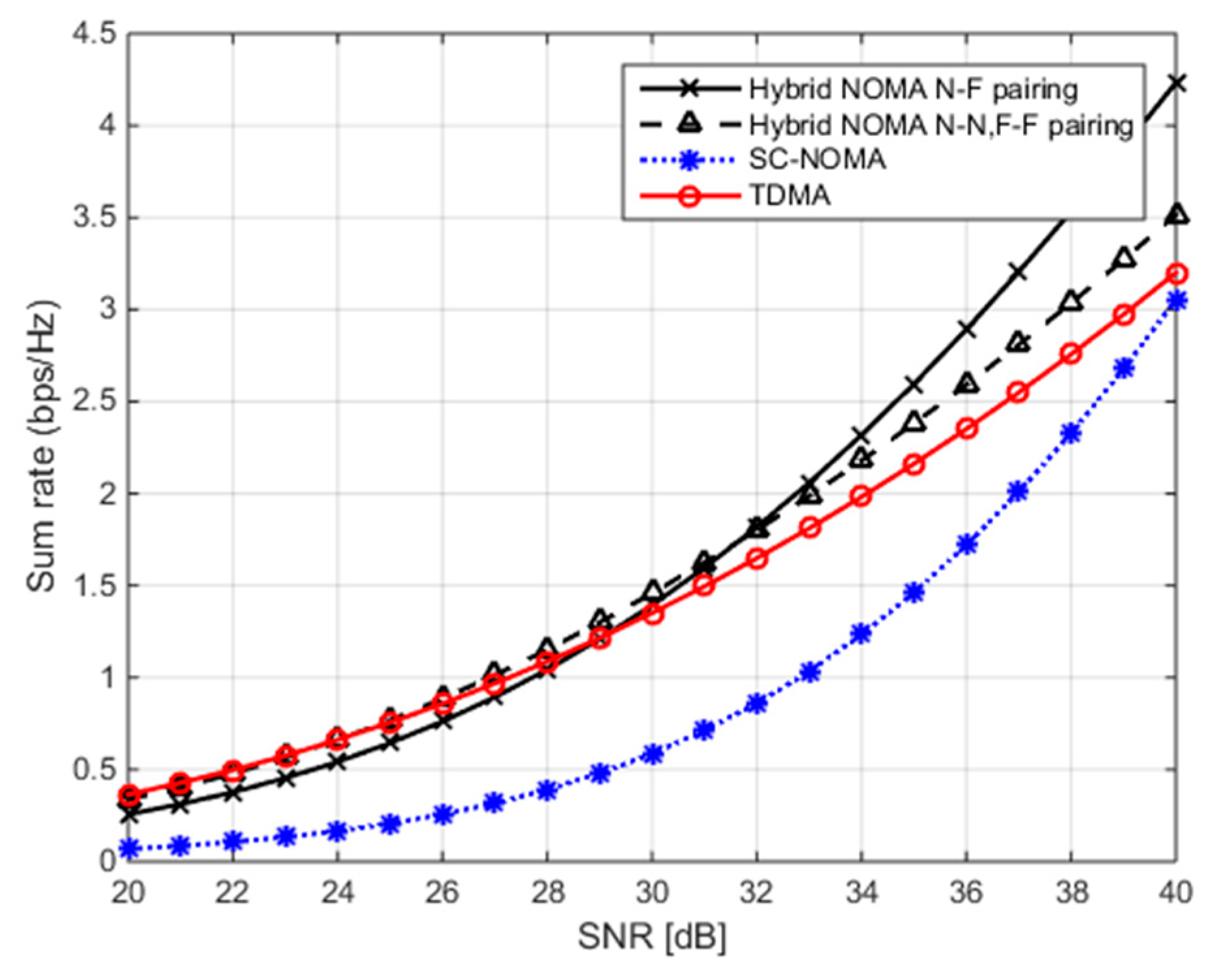
4.4. Sum Rate vs. SNR Results
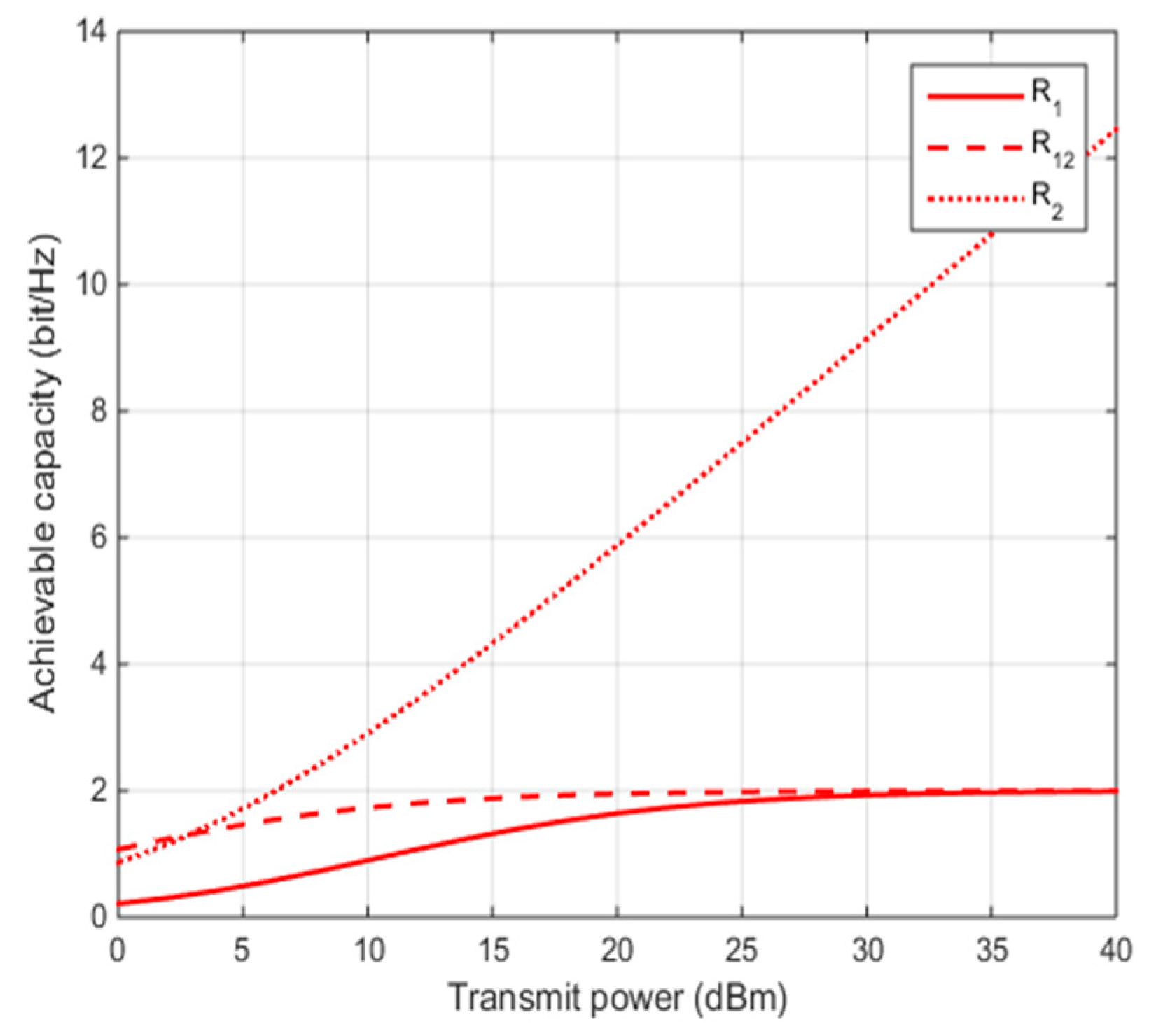
4.5. Achievable Capacity vs. Transmitted Power Results
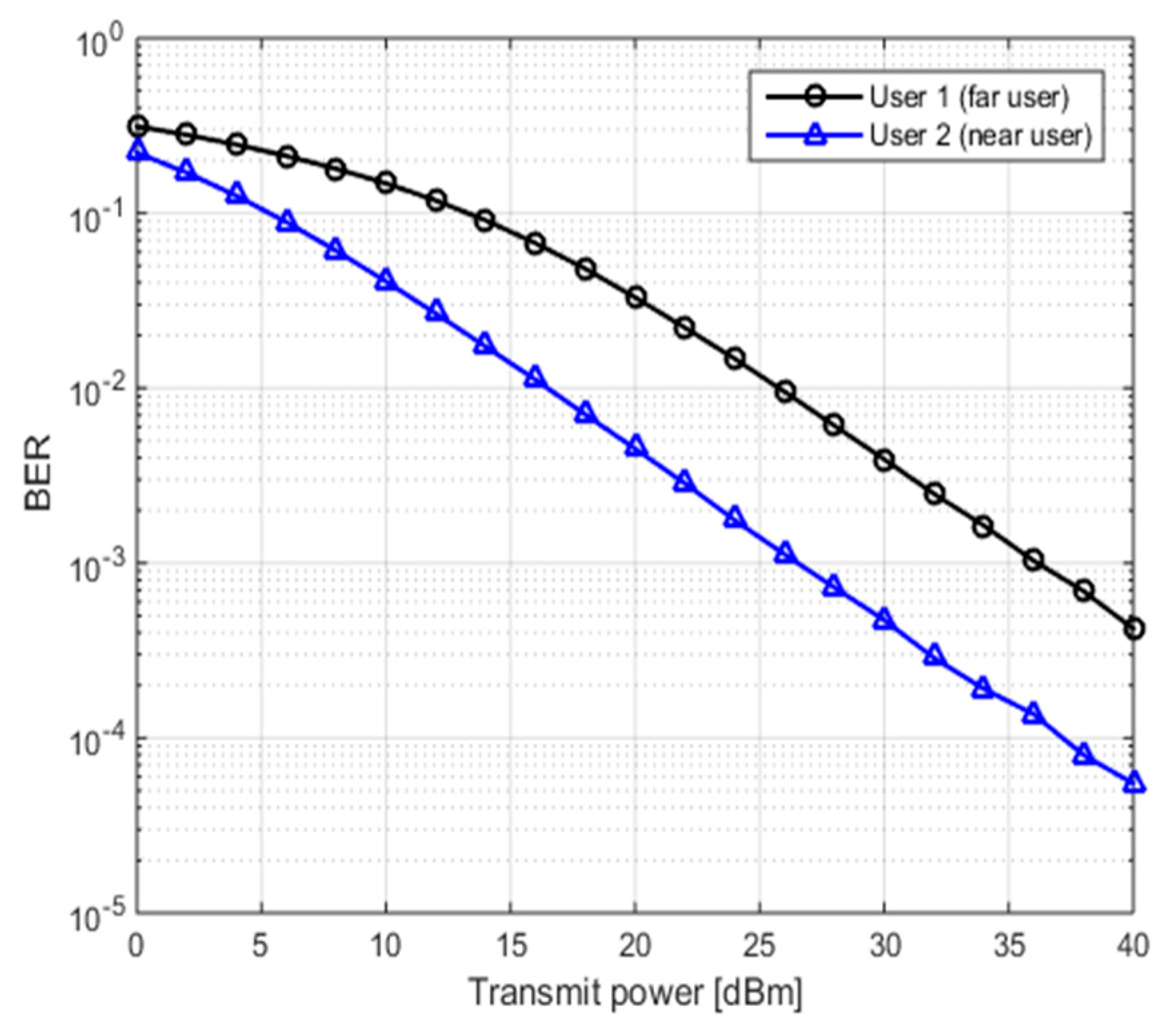
4.6. BER vs. Transmitted Power Results
4.7. Caching Results
4.8. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Anwar, A.; Seet, B.C.; Hasan, M.A.; Li, X.J. A Survey on Application of Non-Orthogonal Multiple Access to Different Wireless Networks. Electronics 2019, 8, 1355. [Google Scholar] [CrossRef]
- Belmekki, B.E.Y.; Hamza, A.; Escrig, B. Performance Analysis of Cooperative NOMA at Intersections for Vehicular Communications in the Presence of Interference. Ad. Hoc. Netw. 2020, 98, 102036. [Google Scholar] [CrossRef]
- Gismalla, M.S.M.; Azmi, A.I.; Salim, M.R.B.; Abdullah, M.F.L.; Iqbal, F.; Mabrouk, W.A.; Othman, M.B.; Ashyap, A.Y.I.; Supa’at, A.S.M. Survey on Device to Device (D2D) Communication for 5GB/6G Networks: Concept, Applications, Challenges, and Future Directions. IEEE Access 2022, 10, 30792–30821. [Google Scholar] [CrossRef]
- Gong, X.; Yue, X.; Liu, F. Performance Analysis of Cooperative NOMA Networks with Imperfect CSI over Nakagami-m Fading Channels. Sensors 2020, 20, 424. [Google Scholar] [CrossRef] [PubMed]
- Sun, Y.; Ng, D.W.K.; Ding, Z.; Schober, R. Optimal Joint Power and Subcarrier Allocation for Full-Duplex Multicarrier Non-Orthogonal Multiple Access Systems. IEEE Trans. Commun. 2016, 65, 1077–1091. [Google Scholar] [CrossRef]
- Manap, S.; Dimyati, K.; Hindia, M.N.; Abu Talip, M.S.; Tafazolli, R. Survey of Radio Resource Management in 5G Heterogeneous Networks. IEEE Access 2020, 8, 131202–131223. [Google Scholar] [CrossRef]
- Mohammed, R.J.; Abed, E.A.; Elgayar, M.M. Comparative Study between Metaheuristic Algorithms for Internet of Things Wireless Nodes Localization. Int. J. Electr. Comput. Eng. IJECE 2022, 12, 660–668. [Google Scholar] [CrossRef]
- Mendes, P.M.; Cabral, J.; Daniel, H.; Dinis, C.; Cui, Y.; Liu, P.; Zhou, Y.; Duan, W. Energy-Efficient Resource Allocation for Downlink Non-Orthogonal Multiple Access Systems. Appl. Sci. 2022, 12, 9740. [Google Scholar] [CrossRef]
- Xu, W.; Tian, J.; Gu, L.; Tao, S. Joint Placement and Power Optimization of UAV-Relay in NOMA Enabled Maritime IoT System. Drones 2022, 6, 304. [Google Scholar] [CrossRef]
- Zhu, Y.; Mao, B.; Kato, N. Intelligent Reflecting Surface in 6G Vehicular Communications: A Survey. IEEE Open J. Veh. Technol. 2022, 3, 266–277. [Google Scholar] [CrossRef]
- Flizikowski, A.; Marciniak, T.; Wysocki, T.A.; Oyerinde, O. Selected Aspects of Non Orthogonal Multiple Access for Future Wireless Communications. Math. Comput. Sci. 2023, 17, 10. [Google Scholar] [CrossRef]
- Mohsan, S.A.H.; Othman, N.Q.H.; Li, Y.; Alsharif, M.H.; Khan, M.A. Unmanned Aerial Vehicles (UAVs): Practical Aspects, Applications, Open Challenges, Security Issues, and Future Trends. Intell. Serv. Robot. 2023, 16, 109–137. [Google Scholar] [CrossRef] [PubMed]
- Nauman, A.; Obayya, M.; Asiri, M.M.; Yadav, K.; Maashi, M.; Assiri, M.; Ehsan, M.K.; Kim, S.W. Minimizing Energy Consumption for NOMA Multi-Drone Communications in Automotive-Industry 5.0. J. King Saud Univ. Comput. Inf. Sci. 2023, 35, 101547. [Google Scholar] [CrossRef]
- Njoya, A.N.; Thron, C.; Awa, M.N.; Abba Ari, A.A.; Gueroui, A.M. Power-Saving System Designs for Hexagonal Cell Based Wireless Sensor Networks with Directional Transmission. J. King Saud Univ. Comput. Inf. Sci. 2022, 34, 7911–7919. [Google Scholar] [CrossRef]
- Yang, J.; Xiao, S.; Jiang, B.; Song, H.; Khan, S.; Islam, S.U. Cache-Enabled Unmanned Aerial Vehicles for Cooperative Cognitive Radio Networks. IEEE Wirel. Commun. 2020, 27, 155–161. [Google Scholar] [CrossRef]
- Kang, S.W.; Thar, K.; Hong, C.S. Unmanned Aerial Vehicle Allocation and Deep Learning Based Content Caching in Wireless Network. In Proceedings of the International Conference on Information Networking, Barcelona, Spain, 7–10 January 2020; pp. 793–796. [Google Scholar] [CrossRef]
- Liu, X.; Liu, Y.; Chen, Y.; Hanzo, L. Trajectory Design and Power Control for Multi-UAV Assisted Wireless Networks: A Machine Learning Approach. IEEE Trans. Veh. Technol. 2019, 68, 7957–7969. [Google Scholar] [CrossRef]
- Zhao, J.; Wang, Y.; Fei, Z.; Wang, X.; Miao, Z. NOMA-Aided UAV Data Collection System: Trajectory Optimization and Communication Design. IEEE Access 2020, 8, 155843–155858. [Google Scholar] [CrossRef]
- Deng, D.; Zhu, M. Joint UAV Trajectory and Power Allocation Optimization for NOMA in Cognitive Radio Network. Phys. Commun. 2021, 46, 101328. [Google Scholar] [CrossRef]
- Lakiotakis, E.; Sermpezis, P.; Dimitropoulos, X. Joint Optimization of UAV Placement and Caching under Battery Constraints in UAV-Aided Small-Cell Networks. In MAGESys 2019, Proceedings of the 2019 ACM SIGCOMM Workshop on Mobile AirGround Edge Computing, Systems, Networks, and Applications, Part of SIGCOMM 2019, Beijing China, 19 August 2019; Association for Computing Machinery: New York, NY, USA; pp. 8–14. [CrossRef]
- Li, X.; Shen, J.; Sun, Y.; Wang, Z.; Zheng, X. A Smart Content Caching and Replacement Scheme for UAV-Assisted Fog Computing Network. In Proceedings of the 2020 12th International Conference on Wireless Communications and Signal Processing, WCSP, Nanjing, China, 21–23 October 2020; pp. 1040–1045. [Google Scholar] [CrossRef]
- Wei, M.; Chen, Y.; Ding, M. On the Performance of UAV-Aided Content Caching in Small-Cell Networks with Joint Transmission. Electronics 2021, 10, 1040. [Google Scholar] [CrossRef]
- Mohsan, S.A.H.; Li, Y.; Shvetsov, A.V.; Varela-Aldás, J.; Mostafa, S.M.; Elfikky, A. A Survey of Deep Learning Based NOMA: State of the Art, Key Aspects, Open Challenges and Future Trends. Sensors 2023, 23, 2946. [Google Scholar] [CrossRef]
- Ahsan Kazmi, S.M.; Ho, T.M.; Nguyen, T.T.; Fahim, M.; Khan, A.; Piran, M.J.; Baye, G. Computing on Wheels: A Deep Reinforcement Learning-Based Approach. IEEE Trans. Intell. Transp. Syst. 2022, 23, 22535–22548. [Google Scholar] [CrossRef]
- Zhang, T.; Wang, Z.; Liu, Y.; Xu, W.; Nallanathan, A. Caching Placement and Resource Allocation for Cache-Enabling UAV NOMA Networks. IEEE Trans. Veh. Technol. 2020, 69, 12897–12911. [Google Scholar] [CrossRef]
- Wang, C.L.; Chen, J.Y.; Chen, Y.J. Power Allocation for a Downlink Non-Orthogonal Multiple Access System. IEEE Wirel. Commun. Lett. 2016, 5, 532–535. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, R. Energy-Efficient UAV Communication with Trajectory Optimization. IEEE Trans. Wirel. Commun. 2017, 16, 3747–3760. [Google Scholar] [CrossRef]
- Zhang, S.; Zhang, H.; He, Q.; Bian, K.; Song, L. Joint Trajectory and Power Optimization for UAV Relay Networks. IEEE Commun. Lett. 2018, 22, 161–164. [Google Scholar] [CrossRef]
- Zhang, H.; Qiu, Y.; Long, K.; Karagiannidis, G.K.; Wang, X.; Nallanathan, A. Resource Allocation in NOMA Based Fog Radio Access Networks. IEEE Wirel. Commun. 2018, 25, 110–115. [Google Scholar] [CrossRef]
- Liu, X.; Jiang, S.; Wu, Y.A.; Liu, X.; Jiang, S.; Wu, Y. A Novel Deep Reinforcement Learning Approach for Task Offloading in MEC Systems. Appl. Sci. 2022, 12, 11260. [Google Scholar] [CrossRef]
- Ghafoor, U.; Khan, H.Z.; Ali, M.; Siddiqui, A.M.; Naeem, M.; Rashid, I. Energy Efficient Resource Allocation for H-NOMA Assisted B5G HetNets. IEEE Access 2022, 10, 91699–91711. [Google Scholar] [CrossRef]
- Ji, P.; Jia, J.; Chen, J.; Guo, L.; Du, A.; Wang, X. Reinforcement Learning Based Joint Trajectory Design and Resource Allocation for RIS-Aided UAV Multicast Networks. Comput. Netw. 2023, 227, 109697. [Google Scholar] [CrossRef]
- Gkonis, P.K.; Trakadas, P.T.; Sarakis, L.E. Non-Orthogonal Multiple Access in Multiuser MIMO Configurations via Code Reuse and Principal Component Analysis. Electronics 2020, 9, 1330. [Google Scholar] [CrossRef]
- Nasir, A.A.; Tuan, H.D.; Duong, T.Q.; Poor, H.V. UAV-Enabled Communication Using NOMA. IEEE Trans. Commun. 2019, 67, 5126–5138. [Google Scholar] [CrossRef]
- Sun, W.; Tang, G.; Hauser, K. Fast UAV Trajectory Optimization Using Bilevel Optimization with Analytical Gradients. IEEE Trans. Robot. 2018, 37, 2010–2024. [Google Scholar] [CrossRef]
- Chang, W.; Meng, Z.T.; Liu, K.C.; Wang, L.C. Energy-Efficient Sleep Strategy for the UBS-Assisted Small-Cell Network. IEEE Trans. Veh. Technol. 2021, 70, 5178–5183. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Refs. | Objectives | Limitations |
|---|---|---|
| Wang et al. [26] |
|
|
| Zeng and Zhang [27] |
|
|
| Zhang et al. [28] |
|
|
| Liu et al. [30] |
|
|
| Ghafoor et al. [31] |
|
|
| Ji et al. [32] |
|
|
| Nasir et al. [34] |
|
|
| Sun et al. [35] |
|
|
| Chang et al. [36] |
|
|
| Notation | Description |
|---|---|
| The set of all users | |
| User 1 and user 2 | |
| The set of all UAVs | |
| The UAV | |
| Ground base station | |
| Total operational time | |
| Fractional coefficient of the transmitted power | |
| Total transmitted power | |
| Rayleigh fading channel | |
| Transmit power of UAV u to ground terminal g | |
| The signal to noise ratio between UAV u and user S or to ground terminal g | |
| The probability of LoS connection | |
| The probability of NLoS connection | |
| µ | The LoS and NLoS attenuation factors |
| Cache hit indicator variable for the home UAV | |
| Cache hit indicator variable at the foreign UAV (u′). | |
| The transmission delay of content (c) for user (s), originating from home UAV u | |
| The transmission delay of content (c) for user (s), originating from foreign UAV u | |
| Actor network parameters (256,relu, sigmoid) | |
| Critic network parameters (256,relu, linear) | |
| Batch size (BZ) | 256 |
| Memory size (MZ) | 106 |
| Notation | Description | Value |
|---|---|---|
| Number of UAVs | 4 | |
| Altitude of UAV | 180 m | |
| Path loss for LoS | 3 | |
| Path loss for NLoS | 80 | |
| Transmit power of UAV | Range 20–40 dBm | |
| Bandwidth | 30 MHz | |
| Maximum speed of UAVs | 30 m/s | |
| Variance of the Gaussian noise | −174 dBm/Hz | |
| Cache size | 30 MB | |
| Number of users | 20 | |
| Carrier frequency | 2 GHz |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
El-Gayar, M.M.; Ajour, M.N. Resource Allocation in UAV-Enabled NOMA Networks for Enhanced Six-G Communications Systems. Electronics 2023, 12, 5033. https://doi.org/10.3390/electronics12245033
El-Gayar MM, Ajour MN. Resource Allocation in UAV-Enabled NOMA Networks for Enhanced Six-G Communications Systems. Electronics. 2023; 12(24):5033. https://doi.org/10.3390/electronics12245033
Chicago/Turabian StyleEl-Gayar, Mostafa Mahmoud, and Mohammed Nasser Ajour. 2023. "Resource Allocation in UAV-Enabled NOMA Networks for Enhanced Six-G Communications Systems" Electronics 12, no. 24: 5033. https://doi.org/10.3390/electronics12245033