
Consistent Weighted Correlation-Based Attention for Transformer Tracking
 , , , , , , and
, , , , , , and
Abstract
:1. Introduction
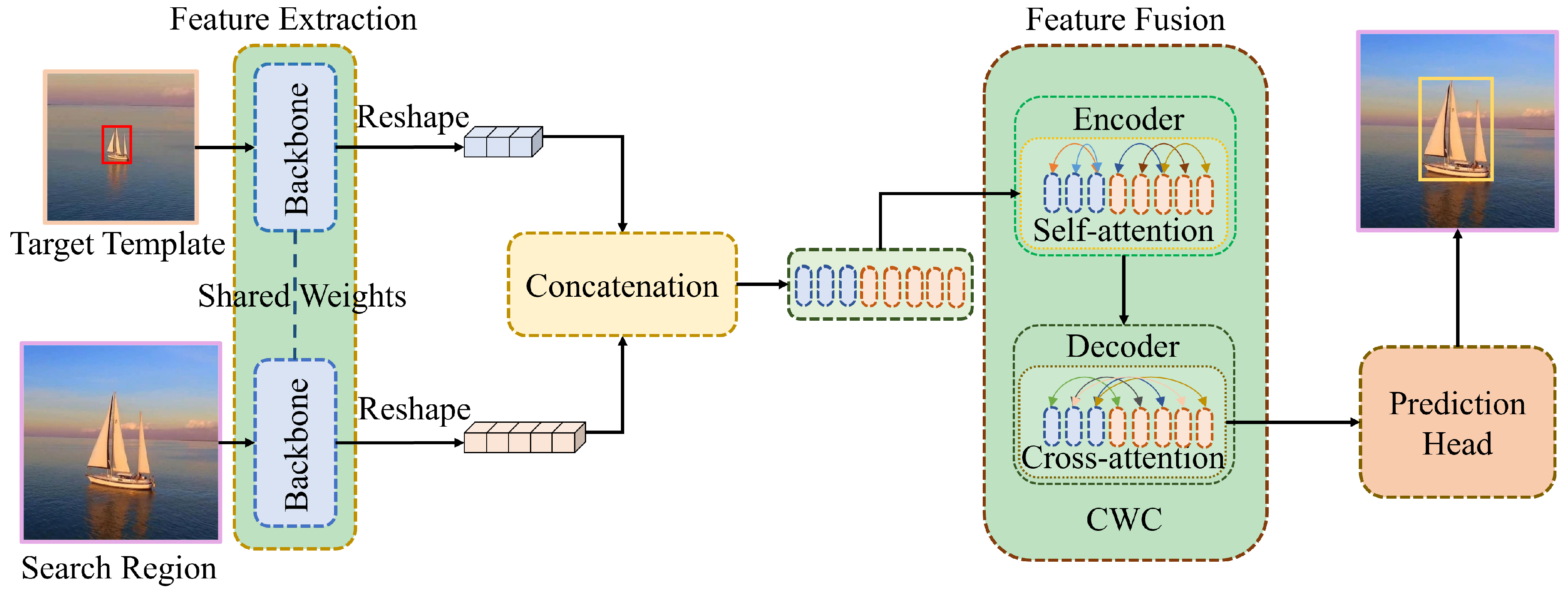
2. The Framework of the Proposed Model
3. Methods
3.1. Backbone
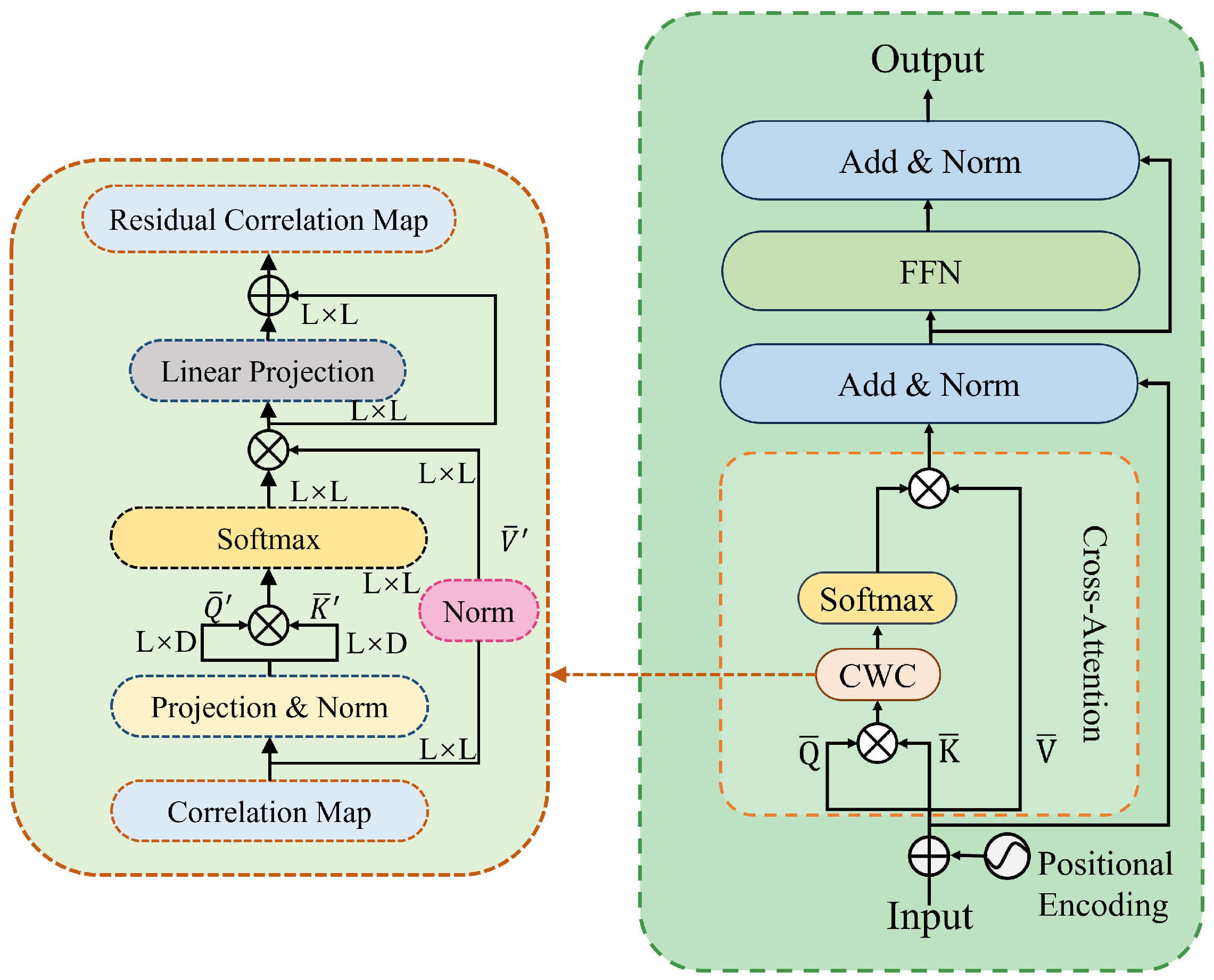
3.2. Encoder
3.3. Consistent Weighted Correlation (CWC) Module
3.4. Prediction Head
3.5. Loss Function for Training
4. Experimental Results
4.1. Implementation Details
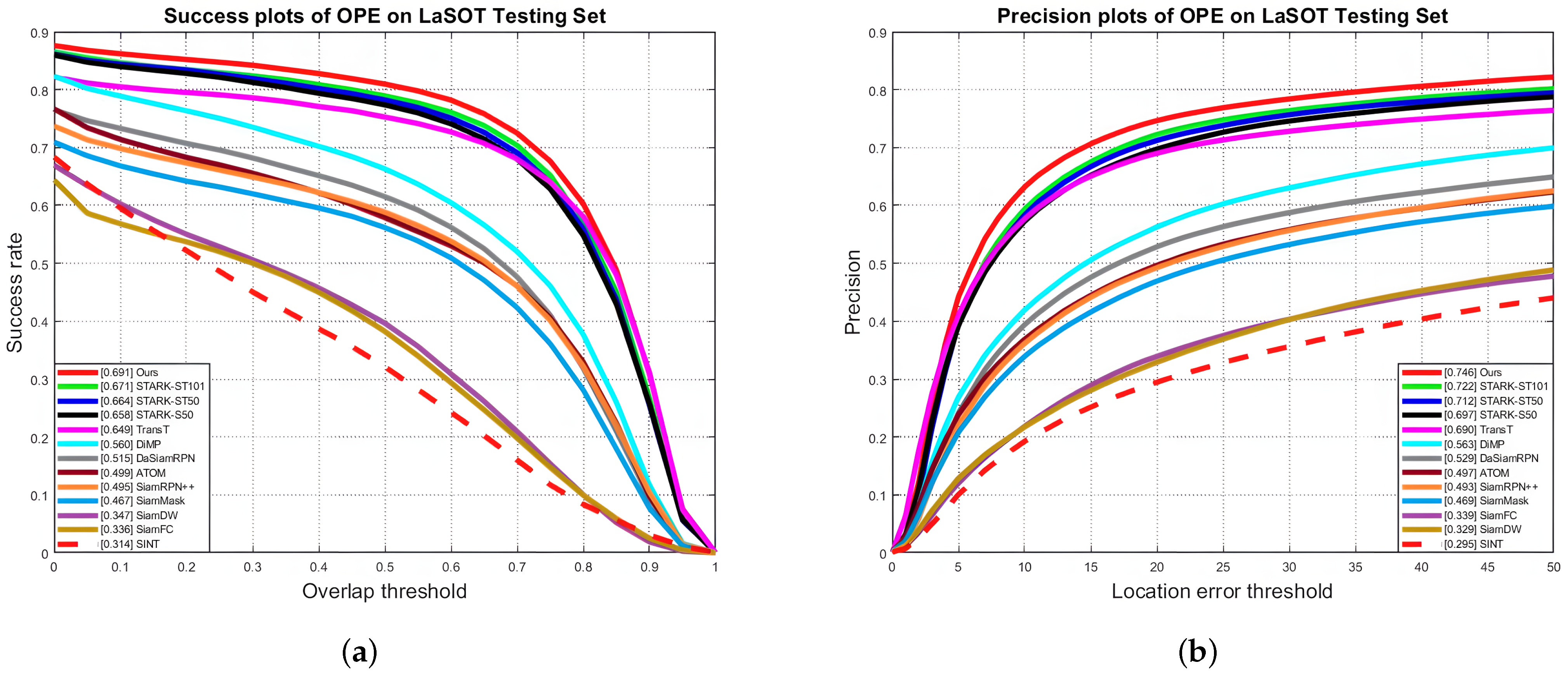
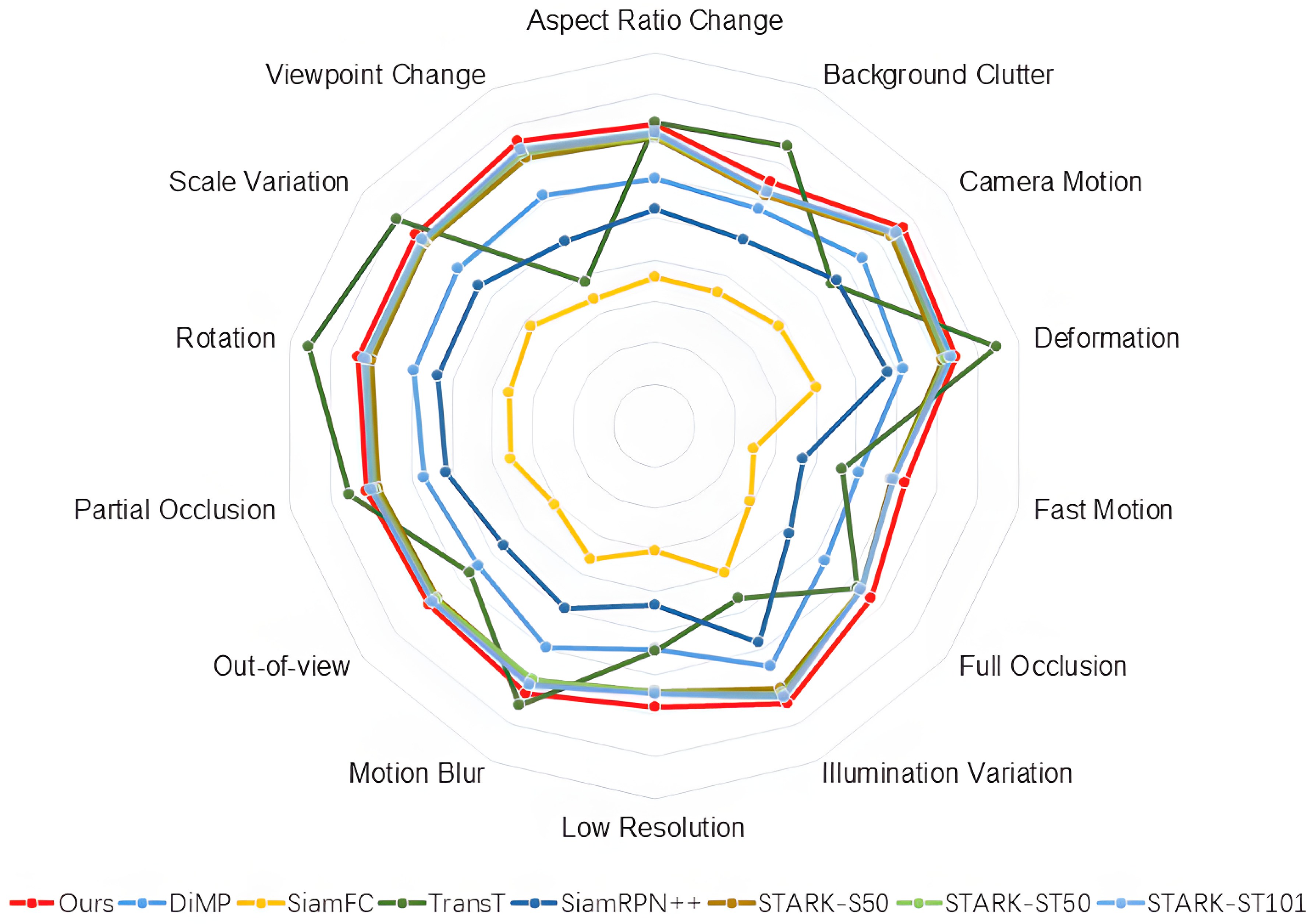
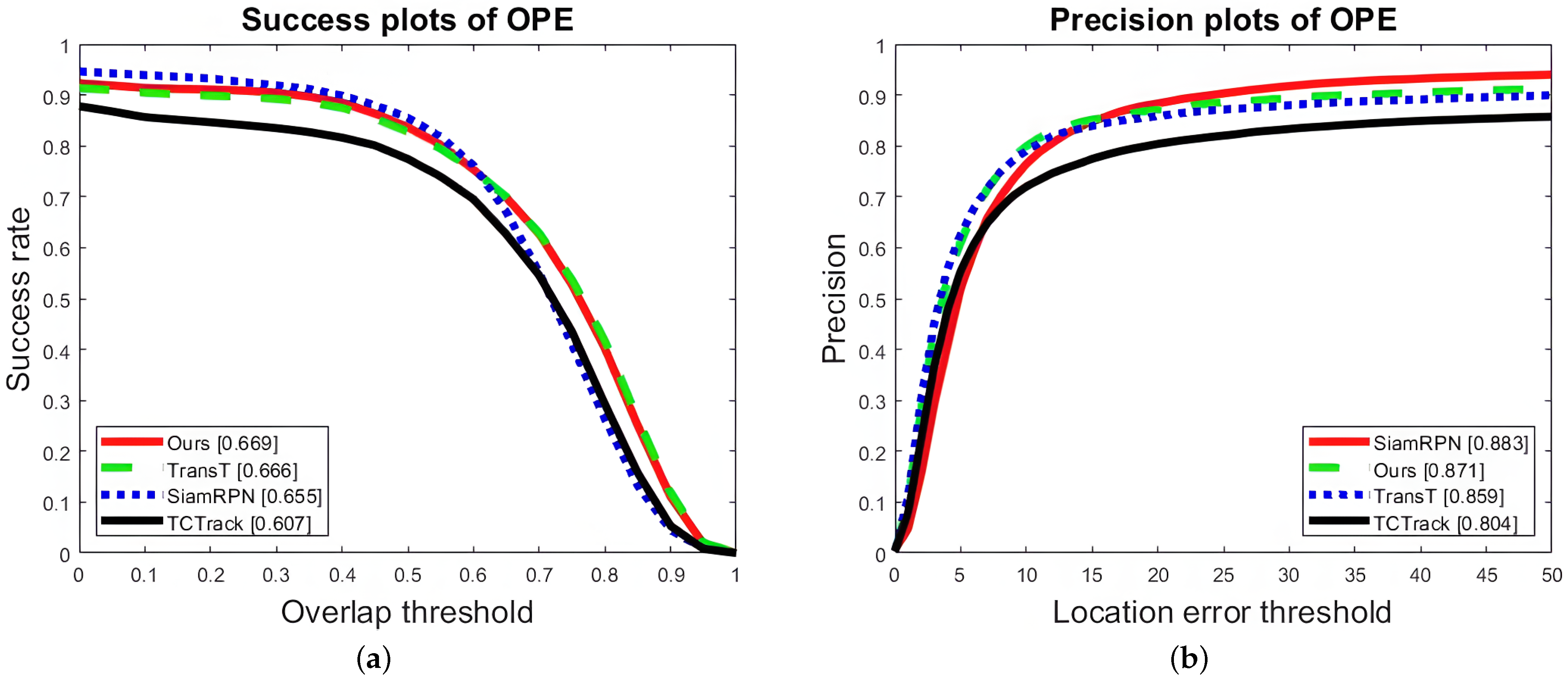
4.2. Results and Comparisons
4.3. Ablation Analysis
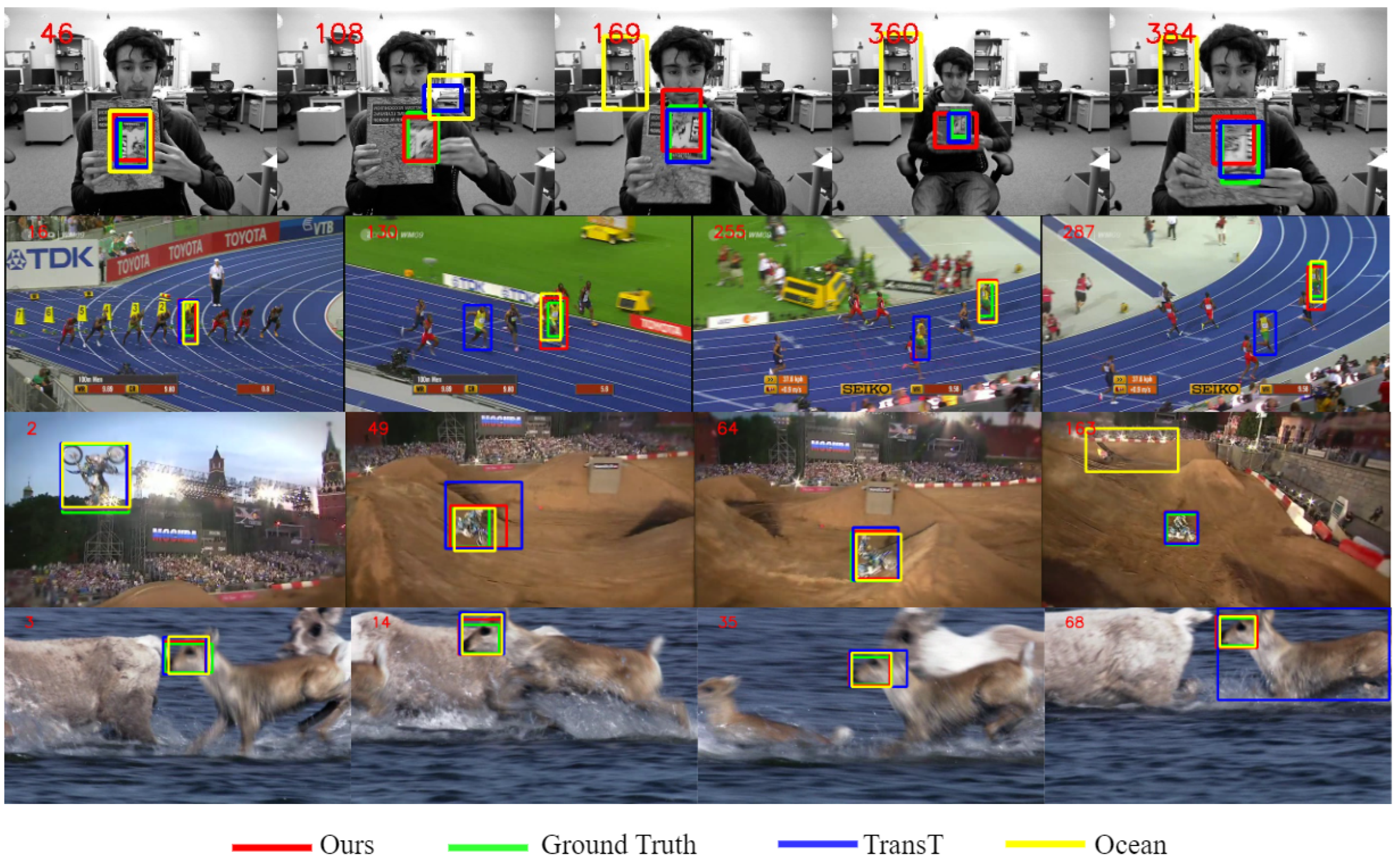
4.4. Visualization of the Tracking Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Marvasti-Zadeh, S.M.; Cheng, L.; Ghanei-Yakhdan, H.; Kasaei, S. Deep learning for visual tracking: A comprehensive survey. IEEE Trans. Intell. Transp. Syst. 2021, 23, 3943–3968. [Google Scholar] [CrossRef]
- Fiaz, M.; Mahmood, A.; Javed, S.; Jung, S.K. Handcrafted and deep trackers: Recent visual object tracking approaches and trends. ACM Comput. Surv. 2019, 52, 1–44. [Google Scholar] [CrossRef]
- Wang, Q.; Teng, Z.; Xing, J.; Gao, J.; Hu, W.; Maybank, S. Learning attentions: Residual attentional siamese network for high performance online visual tracking. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 4854–4863. [Google Scholar]
- Du, F.; Liu, P.; Zhao, W.; Tang, X. Correlation-guided attention for corner detection based visual tracking. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 6836–6845. [Google Scholar]
- Bertinetto, L.; Valmadre, J.; Henriques, J.F.; Vedaldi, A.; Torr, P.H. Fully-convolutional siamese networks for object tracking. In Proceedings of the European Conference on Computer Vision Workshops, Amsterdam, The Netherlands, 11–14 October 2016; pp. 850–865. [Google Scholar]
- Chen, B.; Li, P.; Bai, L.; Qiao, L.; Shen, Q.; Li, B.; Ouyang, W. Backbone is all your need: A simplified architecture for visual object tracking. In Proceedings of the European Conference on Computer Vision, Tel-Aviv, Israel, 23–27 October 2022; pp. 375–392. [Google Scholar]
- Chen, X.; Yan, B.; Zhu, J.; Wang, D.; Yang, X.; Lu, H. Transformer tracking. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 20–25 June 2021; pp. 8126–8135. [Google Scholar]
- Chen, H.; Wang, Z.; Tian, H.; Yuan, L.; Wang, X.; Leng, P. A Robust Visual Tracking Method Based on Reconstruction Patch Transformer Tracking. Sensors 2022, 22, 6558. [Google Scholar] [CrossRef] [PubMed]
- Cui, Y.; Jiang, C.; Wang, L.; Wu, G. Mixformer: End-to-end tracking with iterative mixed attention. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 18–24 June 2022; pp. 13608–13618. [Google Scholar]
- Ye, B.; Chang, H.; Ma, B.; Shan, S.; Chen, X. Joint feature learning and relation modeling for tracking: A one-stream framework. In Proceedings of the European Conference on Computer Vision, Tel-Aviv, Israel, 23–27 October 2022; pp. 341–357. [Google Scholar]
- Zhou, J.; Yao, Y.; Yang, R.; Xia, Y. D-TransT: Deformable Transformer Tracking. Electronics 2022, 11, 3843. [Google Scholar] [CrossRef]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, L.; Polosukhin, I. Attention is all you need. In Proceedings of the International Conference on Neural Information Processing Systems, Long Beach, CA, USA, 4–9 December 2017; pp. 6000–6010. [Google Scholar]
- Huang, L.; Zhao, X.; Huang, K. GOT-10k: A large high-diversity benchmark for generic object tracking in the wild. IEEE Trans. Pattern Anal. Mach. Intell. 2019, 43, 1562–1577. [Google Scholar] [CrossRef] [PubMed]
- Fan, H.; Lin, L.; Yang, F.; Chu, P.; Deng, G.; Yu, S.; Bai, H.; Xu, Y.; Liao, C.; Ling, H. LaSOT: A high-quality benchmark for large-scale single object tracking. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 5369–5378. [Google Scholar]
- Chen, X.; Yan, B.; Zhu, J.; Lu, H.; Ruan, X.; Wang, D. High-performance transformer tracking. IEEE Trans. Pattern Anal. Mach. Intell. 2022, 45, 8507–8523. [Google Scholar] [CrossRef] [PubMed]
- Yan, B.; Peng, H.; Fu, J.; Wang, D.; Lu, H. Learning spatio-temporal transformer for visual tracking. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, QC, Canada, 10–17 October 2021; pp. 10448–10457. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Ba, J.L.; Kiros, J.R.; Hinton, G.E. Layer normalization. arXiv 2016, arXiv:1607.06450. [Google Scholar]
- Carion, N.; Massa, F.; Synnaeve, G.; Usunier, N.; Kirillov, A.; Zagoruyko, S. End-to-end object detection with transformers. In Proceedings of the European Conference on Computer Vision, Glasgow, UK, 23–28 August 2020; pp. 213–229. [Google Scholar]
- Rezatofighi, H.; Tsoi, N.; Gwak, J.; Sadeghian, A.; Reid, I.; Savarese, S. Generalized intersection over union: A metric and a loss for bounding box regression. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 658–666. [Google Scholar]
- Wu, Y.; Lim, J.; Yang, M.H. Object tracking benchmark. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 1834–1848. [Google Scholar] [CrossRef] [PubMed]
- Lin, T.-Y.; Maire, M.; Belongie, S.; Hays, J.; Perona, P.; Ramanan, D.; Dollár, P.; Zitnick, C.L. Microsoft COCO: Common objects in context. In Proceedings of the European Conference on Computer Vision, Zurich, Switzerland, 6–12 September 2014; pp. 740–755. [Google Scholar]
- Muller, M.; Bibi, A.; Giancola, S.; Alsubaihi, S.; Ghanem, B. TrackingNet: A large-scale dataset and benchmark for object tracking in the wild. In Proceedings of the European Conference on Computer Vision, Munich, Germany, 8–14 September 2018; pp. 310–327. [Google Scholar]
- Ioffe, S.; Szegedy, C. Batch normalization: Accelerating deep network training by reducing internal covariate shift. In Proceedings of the International Conference on Machine Learning, Lille, France, 6–11 July 2015; pp. 448–456. [Google Scholar]
- Loshchilov, I.; Hutter, F. Decoupled weight decay regularization. arXiv 2017, arXiv:1711.05101. [Google Scholar]
- Mueller, M.; Smith, N.; Ghanem, B. A benchmark and simulator for UAV tracking. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 11–14 October 2016; pp. 445–461. [Google Scholar]
- Danelljan, M.; Bhat, G.; Khan, F.S.; Felsberg, M. ATOM: Accurate tracking by overlap maximization. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 16–20 June 2019; pp. 4655–4664. [Google Scholar]
- Zhang, Z.; Peng, H.; Fu, J.; Li, B.; Hu, W. Ocean: Object-aware anchor-free tracking. In Proceedings of the European Conference on Computer Vision, Glasgow, UK, 23–28 August 2020; pp. 771–787. [Google Scholar]
- Bhat, G.; Danelljan, M.; Gool, L.V.; Timofte, R. Learning discriminative model prediction for tracking. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Republic of Korea, 27 October–2 November 2019; pp. 6182–6191. [Google Scholar]
- Zhu, Z.; Wang, Q.; Li, B.; Wu, W.; Yan, J.; Hu, W. Distractor-aware siamese networks for visual object tracking. In Proceedings of the European Conference on Computer Vision, Munich, Germany, 8–14 September 2018; pp. 101–117. [Google Scholar]
- Hu, W.; Wang, Q.; Zhang, L.; Bertinetto, L.; Torr, P.H. Siammask: A framework for fast online object tracking and segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2023, 45, 3072–3089. [Google Scholar] [PubMed]
- Zhang, Z.; Peng, H. Deeper and wider siamese networks for real-time visual tracking. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 4591–4600. [Google Scholar]
- Tao, R.; Gavves, E.; Smeulders, A.W. Siamese instance search for tracking. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 1420–1429. [Google Scholar]
- Cao, Z.; Huang, Z.; Pan, L.; Zhang, S.; Liu, Z.; Fu, C. TCTrack: Temporal contexts for aerial tracking. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 18–24 June 2022; pp. 14778–14788. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SiamFC [5] | ATOM [27] | Ocean [28] | STARK-S50 [16] | TransT [7] | Ours | |
|---|---|---|---|---|---|---|
| AO (%) | 34.8 | 55.6 | 61.1 | 67.2 | 67.1 | 68.8 |
| SR0.5 (%) | 35.3 | 63.4 | 72.1 | 76.1 | 76.8 | 76.4 |
| SR0.75 (%) | 9.8 | 40.2 | 4.3 | 61.2 | 60.9 | 61.6 |
| AUC (%) | Precision (%) | |
|---|---|---|
| Ours | 69.1 | 74.6 |
| STARK-101 | 67.1 | 72.2 |
| STARK-ST50 | 66.4 | 71.2 |
| STARK-S50 | 65.8 | 69.7 |
| TransT | 64.9 | 69.0 |
| DiMP | 56.0 | 56.3 |
| DaSiamRPN | 51.5 | 52.9 |
| ATOM | 49.9 | 49.7 |
| SiamMask | 49.5 | 46.9 |
| SiamDW | 46.7 | 32.9 |
| SiamFC | 34.7 | 33.9 |
| SINT | 31.4 | 29.5 |
| SiamFC [5] | ATOM [27] | Ocean [28] | TransT [7] | Ours | |
|---|---|---|---|---|---|
| AUC (%) | 49.2 | 61.7 | 62.1 | 68.1 | 68.2 |
| Precision (%) | 72.7 | 82.7 | 82.3 | 87.6 | 88.3 |
| # | Enc | Dec | CWC | Pos | Success (%) |
|---|---|---|---|---|---|
| 1 | ⊗ | 63.2 | |||
| 2 | ⊗ | 65.4 | |||
| 3 | ⊗ | 66.4 | |||
| 4 | ⊗ | 68.7 | |||
| 5 | 69.1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, L.; Fang, G.; Wang, J.; Wang, S.; Wang, C.; Shen, L.; Zhu, K.; Melo, S.N. Consistent Weighted Correlation-Based Attention for Transformer Tracking. Electronics 2023, 12, 4648. https://doi.org/10.3390/electronics12224648
Liu L, Fang G, Wang J, Wang S, Wang C, Shen L, Zhu K, Melo SN. Consistent Weighted Correlation-Based Attention for Transformer Tracking. Electronics. 2023; 12(22):4648. https://doi.org/10.3390/electronics12224648
Chicago/Turabian StyleLiu, Lei, Genwen Fang, Jun Wang, Shuai Wang, Chun Wang, Longfeng Shen, Kongfen Zhu, and Silas N. Melo. 2023. "Consistent Weighted Correlation-Based Attention for Transformer Tracking" Electronics 12, no. 22: 4648. https://doi.org/10.3390/electronics12224648