
Single-Image Dehazing Based on Improved Bright Channel Prior and Dark Channel Prior
 and
and
Abstract
:1. Introduction
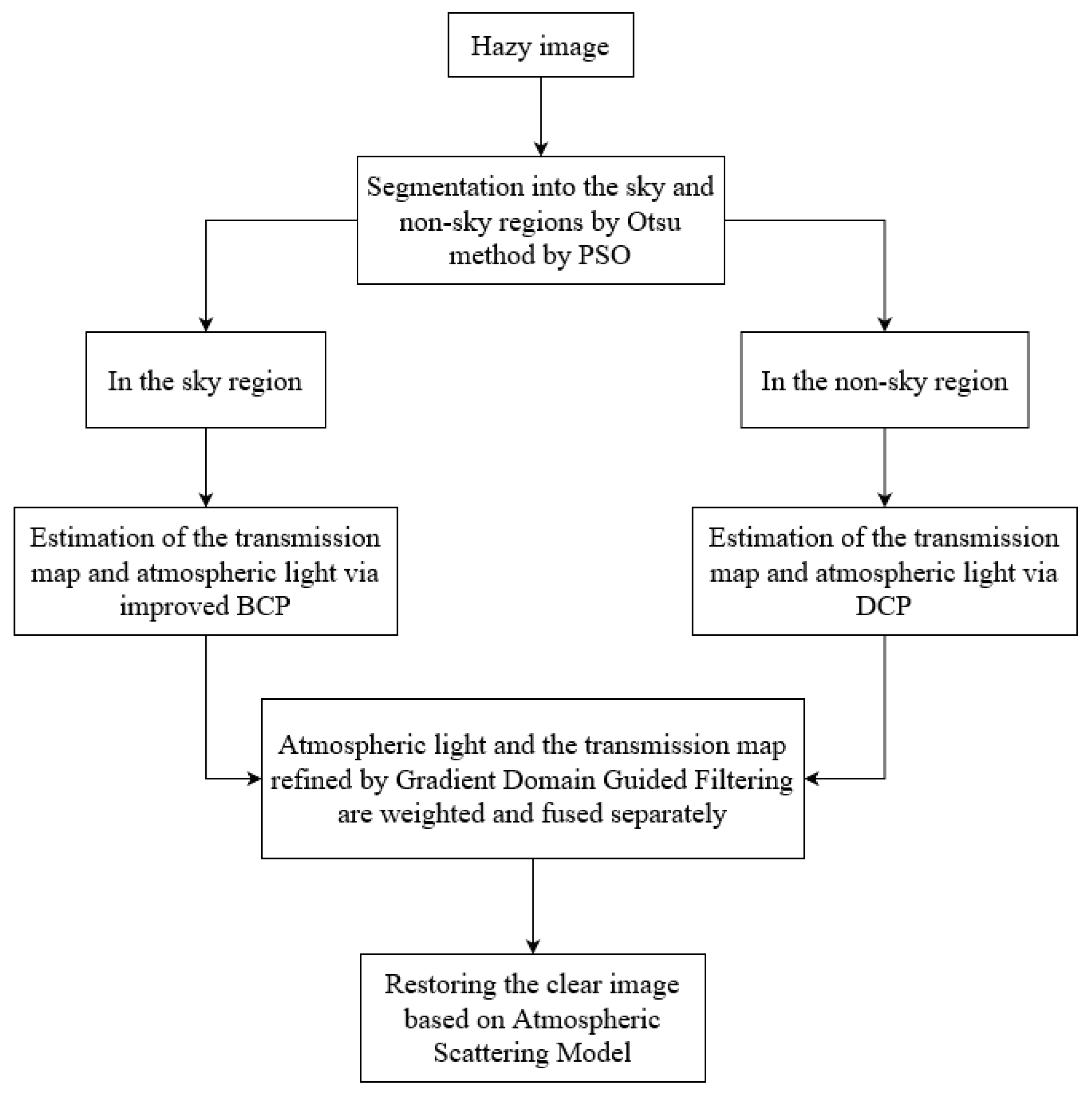
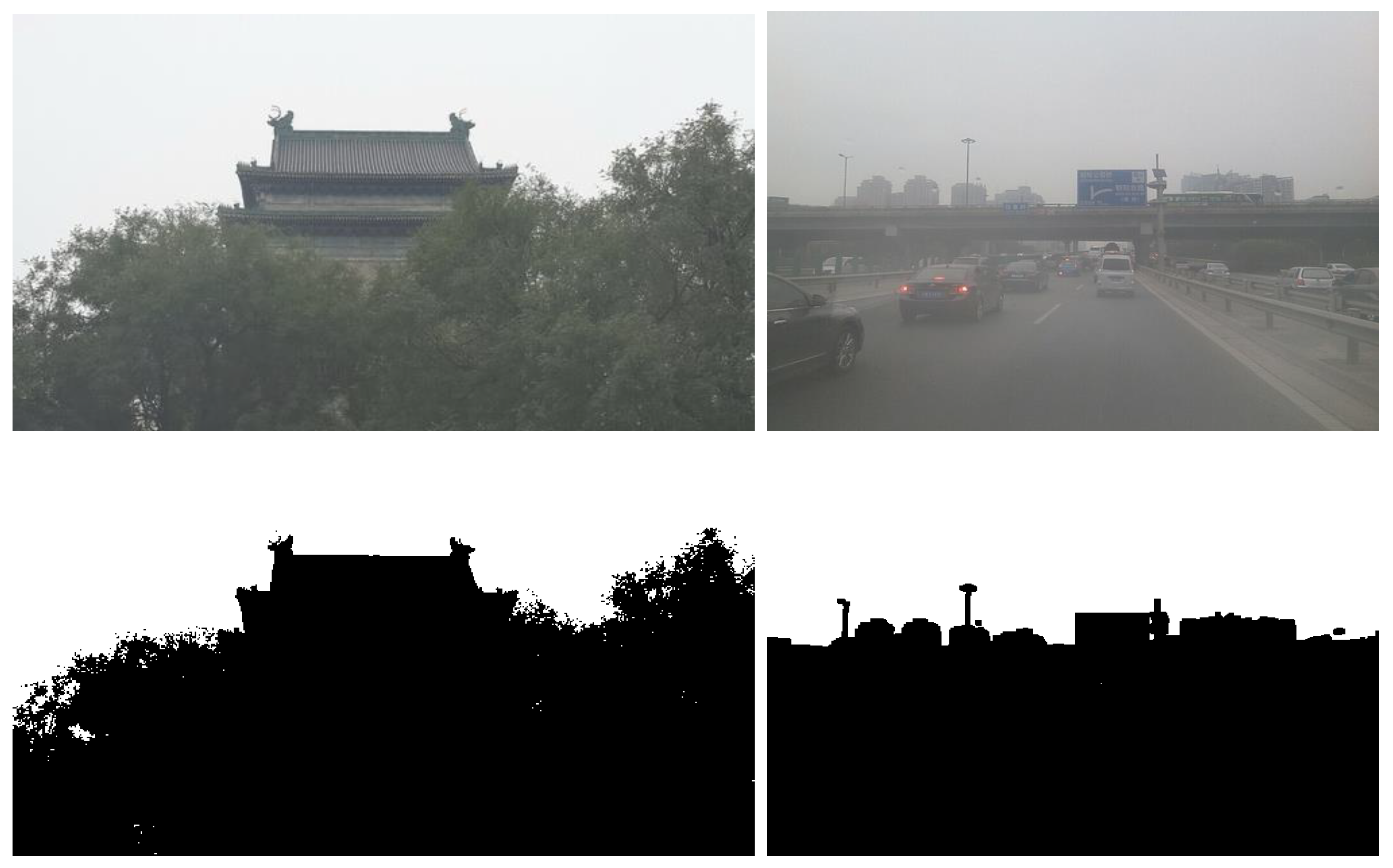
- A Otsu and PSO method is proposed to accurately segment the sky and non-sky regions of hazy images, which allows the different priors in the two regions to estimate the parameters accurately.
- We propose an improved BCP to more accurately estimate the transmission map. Inaccurate estimation of the parameters of the sky region can easily amplify noise and cause distortion, so we limit it.
- To better fuse the parameters estimated by BCP and DCP, we propose weighted fusion functions to obtain more accurate transmission maps and atmospheric light values, respectively.
2. Related Work
2.1. Image-Enhancement-Based Methods
2.2. Prior-Based Methods
2.3. Learning-Based Methods
3. Methods
3.1. Otsu Method by Particle Swarm Optimization
3.2. Accurate Estimation of Transmission Map and Atmospheric Light
3.2.1. In the Non-Sky Region
3.2.2. In the Sky Region
3.3. Fusion of Sky and Non-Sky Regions
3.3.1. Transmission Map Fusion
3.3.2. Atmospheric Light Fusion
3.4. Recovering the Clear Image
| Algorithm 1: Single image dehazing based on improved BCP and DCP. |
Input: A hazy image (1) Segmentation into sky area and non-sky regions using OSTU by PSO. (2.1) For the non-sky region of , the transmission map and atmospheric light are estimated by DCP. (2.2) For the sky region of , the transmission map and atmospheric light are estimated by improved BCP. (4) Recovering the clear image byEquation (16) Output: The clear image |
4. Experiments and Discussion
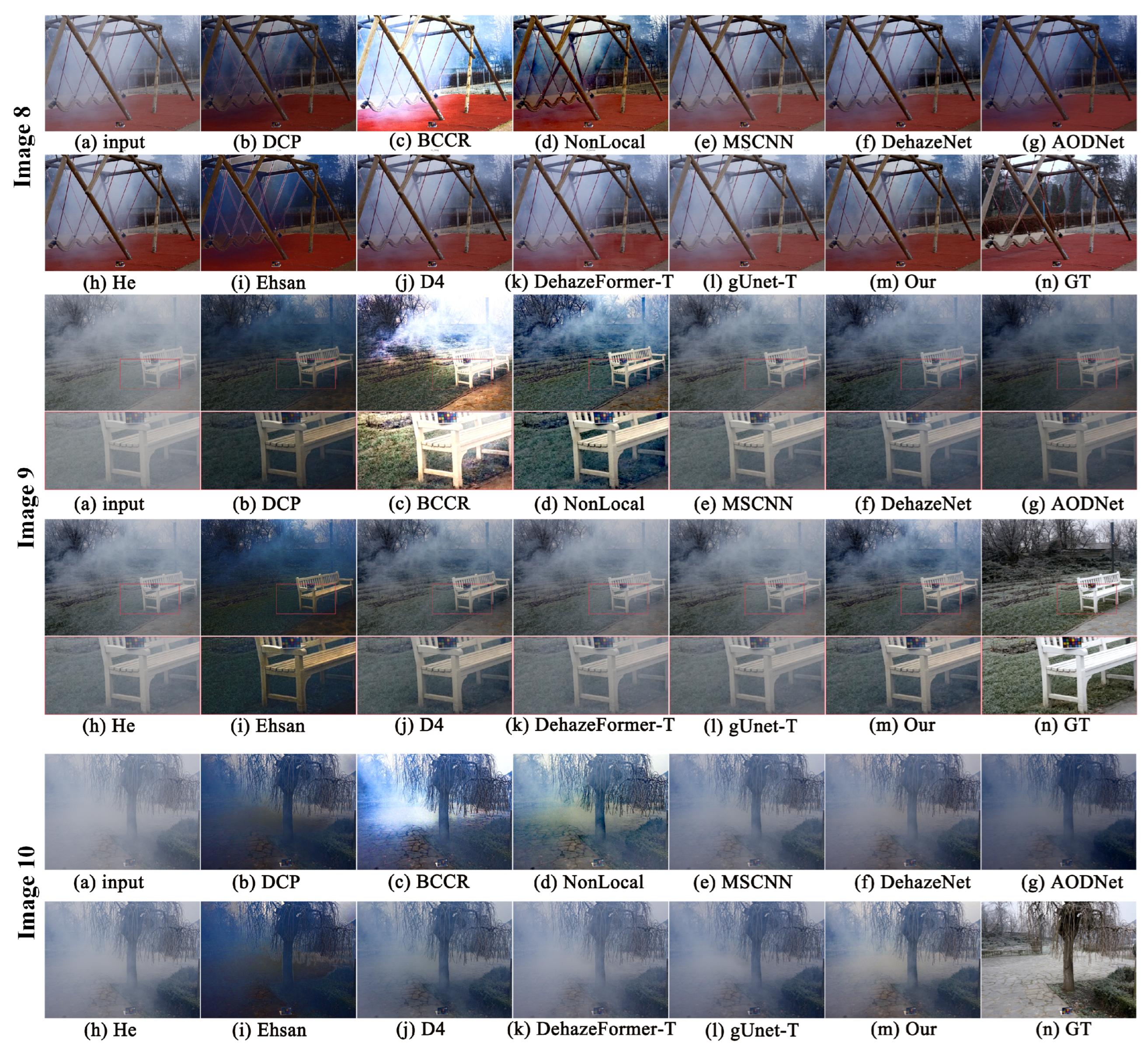
4.1. Experiments on Synthetic Hazy Images
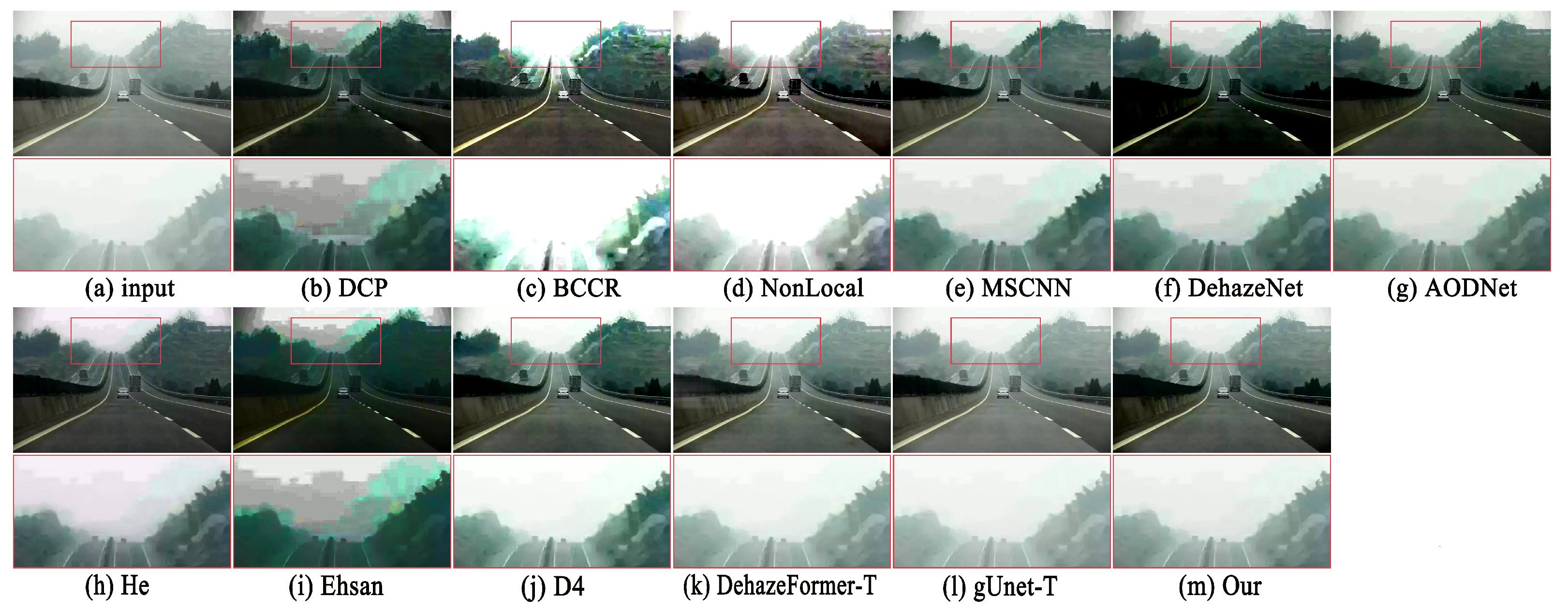
4.2. Experiments on Real-World Hazy Images
4.3. Quantitative Evaluation Experiment
4.4. Application in Traffic Electronic Monitoring
4.5. Processing Time of the Algorithm
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Li, H.; Xie, W.H.; Wang, X.G.; Liu, S.S.; Gai, Y.Y.; Yang, L. Gpu implementation of multi-scale retinex image enhancement algorithm. In Proceedings of the 2016 IEEE/ACS 13th International Conference of Computer Systems and Applications (AICCSA), Agadir, Morocco, 29 November–2 December 2016; pp. 1–5. [Google Scholar]
- Kim, W.; You, J.; Jeong, J. Contrast enhancement using histogram equalization based on logarithmic mapping. Opt. Eng. 2012, 51, 067002. [Google Scholar] [CrossRef]
- Laha, S.; Foroosh, H. Haar Wavelet-Based Attention Network for Image Dehazing. In Proceedings of the 2022 IEEE International Conference on Image Processing (ICIP), Bordeaux, France, 16–19 October 2022; pp. 3948–3952. [Google Scholar]
- Middleton, W.E.K.; Twersky, V. Vision through the atmosphere. Phys. Today 1954, 7, 21. [Google Scholar] [CrossRef]
- McCartney, E.J. Optics of the atmosphere: Scattering by molecules and particles. Phys. Today 1976, 30, 76. [Google Scholar] [CrossRef]
- Narasimhan, S.G.; Nayar, S.K. Vision and the atmosphere. Int. J. Comput. Vis. 2002, 48, 233–254. [Google Scholar] [CrossRef]
- He, K.M.; Sun, J.; Tang, X.O. Single image haze removal using dark channel prior. IEEE Trans. Pattern Anal. Mach. Intell. 2011, 33, 2341–2353. [Google Scholar] [PubMed]
- Zhou, H.; Zhang, Z.; Liu, Y.; Xuan, M.; Jiang, W.; Xiong, H. Single Image Dehazing Algorithm Based on Modified Dark Channel Prior. IEICE Trans. Inf. Syst. 2021, 104, 1758–1761. [Google Scholar] [CrossRef]
- Meng, G.F.; Wang, Y.; Duan, J.Y.; Xiang, S.M.; Pan, C.H. Efficient image dehazing with boundary constraint and contextual regularization. In Proceedings of the IEEE International Conference on Computer Vision, Sydney, NSW, Australia, 1–8 December 2013; pp. 617–624. [Google Scholar]
- Berman, D.; Treibitz, T.; Avidan, S. Non-local image dehazing. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 1674–1682. [Google Scholar]
- Zhou, H.; Xiong, H.; Li, C.; Jiang, W.; Lu, K.; Chen, N.; Liu, Y. Single image dehazing based on weighted variational regularized model. IEICE Trans. Inf. Syst. 2021, 104, 961–969. [Google Scholar] [CrossRef]
- Zhou, H.; Zhao, Z.; Xiong, H.; Liu, Y. A unified weighted variational model for simultaneously haze removal and noise suppression of hazy images. Displays 2022, 72, 102137. [Google Scholar] [CrossRef]
- Hsieh, P.W.; Shao, P.C. Variational contrast-saturation enhancement model for effective single image dehazing. Signal Process. 2022, 192, 108396. [Google Scholar] [CrossRef]
- Li, B.; Peng, X.; Wang, Z.Y.; Xu, D.; Feng, J.Z. Aod-net: All-in-one dehazing network. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 4780–4788. [Google Scholar]
- Ren, W.; Liu, S.; Zhang, H.; Pan, J.; Cao, X.; Yang, M.H. Single image dehazing via multi-scale convolutional neural networks. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 11–14 October 2016; pp. 154–169. [Google Scholar]
- Li, S.; Yuan, Q.; Zhang, Y.; Lv, B.; Wei, F. Image Dehazing Algorithm Based on Deep Learning Coupled Local and Global Features. Appl. Sci. 2022, 12, 8552. [Google Scholar] [CrossRef]
- Liu, Y.; Zhu, L.; Pei, S.; Fu, H.; Qin, J.; Zhang, Q.; Wan, L.; Feng, W. From synthetic to real: Image dehazing collaborating with unlabeled real data. In Proceedings of the 29th ACM International Conference on Multimedia, Virtual, 20–24 October 2021; pp. 50–58. [Google Scholar]
- Liu, Y.; Wan, L.; Fu, H.; Qin, J.; Zhu, L. Phase-based Memory Network for Video Dehazing. In Proceedings of the 30th ACM International Conference on Multimedia, Lisbon, Portugal, 10–14 October 2022; pp. 5427–5435. [Google Scholar]
- Yu, H.; Zheng, N.; Zhou, M.; Huang, J.; Xiao, Z.; Zhao, F. Frequency and Spatial Dual Guidance for Image Dehazing. In Proceedings of the European Conference on Computer Vision, Tel Aviv, Israel, 23–27 October 2022; pp. 181–198. [Google Scholar]
- Zhang, J.; He, F.; Duan, Y.; Yang, S. AIDEDNet: Anti-interference and detail enhancement dehazing network for real-world scenes. Front. Comput. Sci. 2023, 17, 1–11. [Google Scholar] [CrossRef]
- Wu, Y.; Tao, D.; Zhan, Y.; Zhang, C. BiN-Flow: Bidirectional Normalizing Flow for Robust Image Dehazing. IEEE Trans. Image Process. 2022, 31, 6635–6648. [Google Scholar] [CrossRef] [PubMed]
- Bai, H.; Pan, J.; Xiang, X.; Tang, J. Self-guided image dehazing using progressive feature fusion. IEEE Trans. Image Process. 2022, 31, 1217–1229. [Google Scholar] [CrossRef]
- Sahu, G.; Seal, A.; Yazidi, A.; Krejcar, O. A Dual-Channel Dehaze-Net for Single Image Dehazing in Visual Internet of Things Using PYNQ-Z2 Board. IEEE Trans. Autom. Sci. Eng. 2022. [Google Scholar] [CrossRef]
- Susladkar, O.; Deshmukh, G.; Nag, S.; Mantravadi, A.; Makwana, D.; Ravichandran, S.; Chavhan, G.H.; Mohan, C.K.; Mittal, S. ClarifyNet: A high-pass and low-pass filtering based CNN for single image dehazing. J. Syst. Archit. 2022, 132, 102736. [Google Scholar] [CrossRef]
- Jiang, N.; Hu, K.; Zhang, T.; Chen, W.; Xu, Y.; Zhao, T. Deep Hybrid Model for Single Image Dehazing and Detail Refinement. Pattern Recognit. 2022, 136, 109227. [Google Scholar] [CrossRef]
- Meng, J.; Li, Y.; Liang, H.; Ma, Y. Single-image dehazing based on two-stream convolutional neural network. J. Artif. Intell. Technol. 2022, 2, 100–110. [Google Scholar] [CrossRef]
- Chen, X.; Fan, Z.; Li, P.; Dai, L.; Kong, C.; Zheng, Z.; Huang, Y.; Li, Y. Unpaired Deep Image Dehazing Using Contrastive Disentanglement Learning. In Proceedings of the European Conference on Computer Vision, Tel Aviv, Israel, 23–27 October 2022; pp. 632–648. [Google Scholar]
- Zheng, Y.; Su, J.; Zhang, S.; Tao, M.; Wang, L. Dehaze-AGGAN: Unpaired Remote Sensing Image Dehazing Using Enhanced Attention-Guide Generative Adversarial Networks. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–13. [Google Scholar] [CrossRef]
- Alenezi, F.; Armghan, A.; Santosh, K. Underwater image dehazing using global color features. Eng. Appl. Artif. Intell. 2022, 116, 105489. [Google Scholar] [CrossRef]
- Hassan, H.; Mishra, P.; Ahmad, M.; Bashir, A.K.; Huang, B.; Luo, B. Effects of haze and dehazing on deep learning-based vision models. Appl. Intell. 2022, 52, 16334–16352. [Google Scholar] [CrossRef]
- Parihar, A.S.; Java, A. Densely connected convolutional transformer for single image dehazing. J. Vis. Commun. Image Represent. 2022, 90, 103722. [Google Scholar] [CrossRef]
- Zheng, L.; Li, Y.; Zhang, K.; Luo, W. T-Net: Deep stacked scale-iteration network for image dehazing. IEEE Trans. Multimed. 2022. [Google Scholar] [CrossRef]
- Yan, Y.; Ren, W.; Guo, Y.; Wang, R.; Cao, X. Image deblurring via extreme channels prior. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 4003–4011. [Google Scholar]
- Cao, N.; Lyu, S.; Hou, M.; Wang, W.; Gao, Z.; Shaker, A.; Dong, Y. Restoration method of sootiness mural images based on dark channel prior and Retinex by bilateral filter. Herit. Sci. 2021, 9, 1–19. [Google Scholar] [CrossRef]
- Wang, M.-w.; Zhu, F.-z.; Bai, Y.-y. An improved image blind deblurring based on dark channel prior. Optoelectron. Lett. 2021, 17, 40–46. [Google Scholar] [CrossRef]
- Pan, Y.; Chen, Z.; Li, X.; He, W. Single-Image Dehazing via Dark Channel Prior and Adaptive Threshold. Int. J. Image Graph. 2021, 21, 2150053. [Google Scholar] [CrossRef]
- Wang, Y.; Huang, T.Z.; Zhao, X.L.; Deng, L.J.; Ji, T.Y. A convex single image dehazing model via sparse dark channel prior. Appl. Math. Comput. 2020, 375, 125085. [Google Scholar] [CrossRef]
- Zhu, Q.; Mai, J.; Shao, L. A fast single image haze removal algorithm using color attenuation prior. IEEE Trans. Image Process. 2015, 24, 3522–3533. [Google Scholar]
- He, J.; Xing, F.Z.; Yang, R.; Zhang, C. Fast single image dehazing via multilevel wavelet transform based optimization. arXiv 2019, arXiv:1904.08573. [Google Scholar]
- Ehsan, S.M.; Imran, M.; Ullah, A.; Elbasi, E. A single image dehazing technique using the dual transmission maps strategy and gradient-domain guided image filtering. IEEE Access 2021, 9, 89055–89063. [Google Scholar] [CrossRef]
- Cai, B.; Xu, X.M.; Jia, K.; Qing, C.M.; Tao, D.C. Dehazenet: An end-to-end system for single image haze removal. IEEE Trans. Image Process. 2016, 25, 5187–5198. [Google Scholar] [CrossRef] [Green Version]
- He, K.; Sun, J.; Tang, X. Guided image filtering. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 35, 1397–1409. [Google Scholar] [CrossRef] [PubMed]
- Engin, D.; Genç, A.; Kemal Ekenel, H. Cycle-dehaze: Enhanced cyclegan for single image dehazing. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, Salt Lake City, UT, USA, 18–22 June 2018; pp. 825–833. [Google Scholar]
- Chen, D.; He, M.; Fan, Q.; Liao, J.; Zhang, L.; Hou, D.; Yuan, L.; Hua, G. Gated context aggregation network for image dehazing and deraining. In Proceedings of the 2019 IEEE Winter Conference on Applications of Computer Vision (WACV), Waikoloa Village, HI, USA, 7–11 January 2019; pp. 1375–1383. [Google Scholar]
- Wu, H.; Qu, Y.; Lin, S.; Zhou, J.; Qiao, R.; Zhang, Z.; Xie, Y.; Ma, L. Contrastive learning for compact single image dehazing. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 20–25 June 2021; pp. 10551–10560. [Google Scholar]
- Tran, L.A.; Moon, S.; Park, D.C. A novel encoder-decoder network with guided transmission map for single image dehazing. arXiv 2022, arXiv:2202.04757. [Google Scholar] [CrossRef]
- Zhao, B.; Wu, H.; Ma, Z.; Fu, H.; Ren, W.; Liu, G. Nighttime Image Dehazing Based on Multi-Scale Gated Fusion Network. Electronics 2022, 11, 3723. [Google Scholar] [CrossRef]
- Alenezi, F. RGB-Based Triple-Dual-Path Recurrent Network for Underwater Image Dehazing. Electronics 2022, 11, 2894. [Google Scholar] [CrossRef]
- Yang, Y.; Wang, C.; Liu, R.; Zhang, L.; Guo, X.; Tao, D. Self-Augmented Unpaired Image Dehazing via Density and Depth Decomposition. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 19–20 June 2022; pp. 2037–2046. [Google Scholar]
- Song, Y.; He, Z.; Qian, H.; Du, X. Vision Transformers for Single Image Dehazing. arXiv 2022, arXiv:2204.03883. [Google Scholar]
- Liu, Z.; Lin, Y.; Cao, Y.; Hu, H.; Wei, Y.; Zhang, Z.; Lin, S.; Guo, B. Swin transformer: Hierarchical vision transformer using shifted windows. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Virtual, 11–17 October 2021; pp. 10012–10022. [Google Scholar]
- Song, Y.; Zhou, Y.; Qian, H.; Du, X. Rethinking Performance Gains in Image Dehazing Networks. arXiv 2022, arXiv:2209.11448. [Google Scholar]
- Long, J.; Shelhamer, E.; Darrell, T. Fully convolutional networks for semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 3431–3440. [Google Scholar]
- Shoron, S.H.; Islam, M.; Uddin, J.; Shon, D.; Im, K.; Park, J.H.; Lim, D.S.; Jang, B.; Kim, J.M. A watermarking technique for biomedical images using SMQT, Otsu, and Fuzzy C-Means. Electronics 2019, 8, 975. [Google Scholar] [CrossRef] [Green Version]
- Ma, G.; Yue, X. An improved whale optimization algorithm based on multilevel threshold image segmentation using the Otsu method. Eng. Appl. Artif. Intell. 2022, 113, 104960. [Google Scholar] [CrossRef]
- Poli, R.; Kennedy, J.; Blackwell, T. Particle swarm optimization. Swarm Intell. 2007, 1, 33–57. [Google Scholar] [CrossRef]
- Singh, A.; Sharma, A.; Rajput, S.; Bose, A.; Hu, X. An Investigation on Hybrid Particle Swarm Optimization Algorithms for Parameter Optimization of PV Cells. Electronics 2022, 11, 909. [Google Scholar] [CrossRef]
- Song, S.; Jia, Z.; Yang, J.; Nikola, K. Minimum spanning tree image segmentation algorithm combined with ostu threshold method. Comput. Eng. Appl 2019, 55, 178–183. [Google Scholar]
- Kou, F.; Chen, W.; Wen, C.; Li, Z. Gradient domain guided image filtering. IEEE Trans. Image Process. 2015, 24, 4528–4539. [Google Scholar] [CrossRef] [PubMed]
- Li, B.Y.; Ren, W.Q.; Fu, D.P.; Tao, D.C.; Feng, D.; Zeng, W.J.; Wang, Z.Y. Reside: A benchmark for single image dehazing. arXiv 2017, arXiv:1712.04143. [Google Scholar]
- Ancuti, C.O.; Ancuti, C.; Timofte, R.; Vleeschouwer, C.D. O-haze: A dehazing benchmark with real hazy and haze-free outdoor images. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, Salt Lake City, UT, USA, 18–22 June 2018; pp. 754–762. [Google Scholar]
- Ancuti, C.O.; Ancuti, C.; Timofte, R. Nh-haze: An image dehazing benchmark with non-homogeneous hazy and haze-free images. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops, Seattle, WA, USA, 13–19 June 2020; pp. 444–445. [Google Scholar]
- Wang, Z.; Bovik, A.; Sheikh, H.; Simoncelli, E. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | PSNR/SSIM Values for Images 1–10. | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | |
| DCP [7] | 11.089 | 11.190 | 18.619 | 12.209 | 21.088 | 18.497 | 13.269 | 14.882 | 12.244 | 11.220 |
| /0.727 | /0.715 | / 0.918 | /0.535 | /0.561 | /0.763 | /0.545 | /0.584 | /0.335 | /0.273 | |
| BCCR [9] | 19.987 | 15.577 | 21.027 | 15.275 | 15.667 | 15.925 | 8.395 | 6.632 | 8.464 | 12.297 |
| /0.896 | /0.495 | / 0.882 | /0.599 | /0.523 | / 0.699 | /0.517 | /0.428 | /0.472 | /0.277 | |
| NonLocal [10] | 27.937 | 16.550 | 21.063 | 13.674 | 13.211 | 19.308 | 18.526 | 15.132 | 13.202 | 13.418 |
| /0.971 | /0.927 | /0.838 | /0.579 | /0.513 | /0.708 | /0.682 | /0.578 | /0.493 | /0.371 | |
| MSCNN [15] | 26.273 | 28.195 | 23.438 | 16.461 | 20.649 | 21.324 | 17.109 | 14.097 | 13.926 | 15.042 |
| /0.964 | /0.946 | /0.925 | /0.654 | /0.676 | /0.809 | /0.731 | /0.605 | /0.442 | /0.312 | |
| DehazeNet [41] | 23.790 | 22.745 | 19.717 | 14.743 | 21.107 | 16.980 | 16.959 | 13.884 | 13.070 | 14.394 |
| /0.965 | /0.947 | /0.710 | /0.541 | /0.648 | /0.679 | /0.670 | /0.566 | /0.395 | /0.348 | |
| AODNet [14] | 17.454 | 16.120 | 15.810 | 13.581 | 16.142 | 16.421 | 15.362 | 14.999 | 13.514 | 12.745 |
| /0.912 | /0.896 | /0.754 | /0.460 | /0.376 | /0.644 | /0.586 | /0.550 | /0.385 | /0.263 | |
| He [39] | 21.662 | 21.712 | 24.983 | 15.723 | 19.857 | 21.349 | 20.469 | 13.177 | 12.911 | 14.788 |
| /0.923 | /0.916 | /0.905 | /0.576 | /0.698 | /0.787 | /0.760 | /0.610 | /0.417 | /0.323 | |
| Ehsan [40] | 18.067 | 15.713 | 16.845 | 12.135 | 17.421 | 16.519 | 17.012 | 14.488 | 12.061 | 10.176 |
| /0.805 | /0.817 | /0.855 | /0.553 | /0.456 | /0.682 | /0.643 | /0.546 | /0.327 | /0.232 | |
| D4 [49] | 22.212 | 27.556 | 30.337 | 16.955 | 19.562 | 21.819 | 21.447 | 13.733 | 14.205 | 14.311 |
| /0.965 | /0.970 | /0.978 | /0.695 | /0.803 | /0.859 | /0.816 | /0.648 | /0.501 | /0.507 | |
| DehazeFormer-T [50] | 28.043 | 29.251 | 34.520 | 16.379 | 21.051 | 24.324 | 20.806 | 12.798 | 13.071 | 14.764 |
| /0.973 | /0.978 | /0.983 | /0.723 | /0.816 | /0.856 | /0.800 | /0.633 | /0.455 | /0.491 | |
| gUNet-T [52] | 34.693 | 34.214 | 36.290 | 16.065 | 19.435 | 22.761 | 19.421 | 12.356 | 13.227 | 14.909 |
| /0.990 | /0.989 | /0.991 | /0.722 | /0.778 | /0.848 | /0.768 | /0.619 | /0.449 | /0.495 | |
| Our | 27.958 | 30.125 | 30.709 | 17.480 | 21.131 | 25.686 | 21.530 | 15.482 | 14.423 | 15.359 |
| /0.974 | /0.973 | /0.987 | /0.732 | /0.830 | /0.864 | /0.820 | /0.649 | /0.506 | /0.518 | |
| Methods | SOTS-Outdoor | O-Haze | NH-Haze | |||
|---|---|---|---|---|---|---|
| PSNR | SSIM | PSNR | SSIM | PSNR | SSIM | |
| DCP [7] | 14.802 | 0.802 | 14.428 | 0.502 | 11.573 | 0.418 |
| BCCR [9] | 15.323 | 0.795 | 8.719 | 0.524 | 10.271 | 0.500 |
| NonLocal [10] | 18.581 | 0.843 | 15.006 | 0.649 | 12.155 | 0.529 |
| MSCNN [15] | 19.108 | 0.875 | 17.012 | 0.675 | 12.796 | 0.500 |
| DehazeNet [41] | 18.696 | 0.742 | 15.486 | 0.601 | 11.852 | 0.448 |
| AODNet [14] | 19.645 | 0.892 | 15.098 | 0.543 | 11.873 | 0.424 |
| He [39] | 23.743 | 0.912 | 15.573 | 0.625 | 12.215 | 0.473 |
| Ehsan [40] | 13.899 | 0.739 | 14.628 | 0.567 | 11.106 | 0.404 |
| D4 [49] | 25.066 | 0.939 | 16.746 | 0.657 | 12.666 | 0.507 |
| DehazeFormer-T [50] | 29.293 | 0.964 | 15.925 | 0.637 | 12.051 | 0.485 |
| gUNet-T [52] | 35.649 | 0.987 | 15.820 | 0.630 | 12.055 | 0.479 |
| Our | 25.543 | 0.946 | 18.283 | 0.688 | 13.285 | 0.536 |
| Image | Input | DCP [7] | BCCR [9] | NonLocal [10] | MSCNN [15] | DehazeNet [41] | AODNet [14] | He [39] | Ehsan [40] | D4 [49] | DehazeFormer-T [50] | gUNet-T [52] | Our |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| FADE | 3.511 | 1.184 | 1.112 | 1.077 | 2.072 | 1.003 | 1.519 | 1.880 | 1.293 | 1.582 | 2.302 | 2.980 | 1.027 |
| Image | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|---|
| Size | 550 × 413 | 550 × 309 | 550 × 413 | 459 × 573 | 476 × 311 | 541 × 358 | 484 × 334 | 1600 × 1200 | 1600 × 1200 | 1600 × 1200 |
| Time | 3.294 s | 2.594 s | 3.155 s | 3.358 s | 2.396 s | 2.964 s | 2.477 s | 21.308 s | 19.559 s | 20.270 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, C.; Yuan, C.; Pan, H.; Yang, Y.; Wang, Z.; Zhou, H.; Xiong, H. Single-Image Dehazing Based on Improved Bright Channel Prior and Dark Channel Prior. Electronics 2023, 12, 299. https://doi.org/10.3390/electronics12020299
Li C, Yuan C, Pan H, Yang Y, Wang Z, Zhou H, Xiong H. Single-Image Dehazing Based on Improved Bright Channel Prior and Dark Channel Prior. Electronics. 2023; 12(2):299. https://doi.org/10.3390/electronics12020299
Chicago/Turabian StyleLi, Chuan, Changjiu Yuan, Hongbo Pan, Yue Yang, Ziyan Wang, Hao Zhou, and Hailing Xiong. 2023. "Single-Image Dehazing Based on Improved Bright Channel Prior and Dark Channel Prior" Electronics 12, no. 2: 299. https://doi.org/10.3390/electronics12020299