
Design of a Low Power Condenser for Underwater Ships
Abstract
:1. Introduction
- (1)
- Sea water will not make direct contact the heat exchange equipment and cooler, which will greatly reduce the risk of corrosion by sea water and improve the safety of marine power equipment.
- (2)
2. Cooling System Design
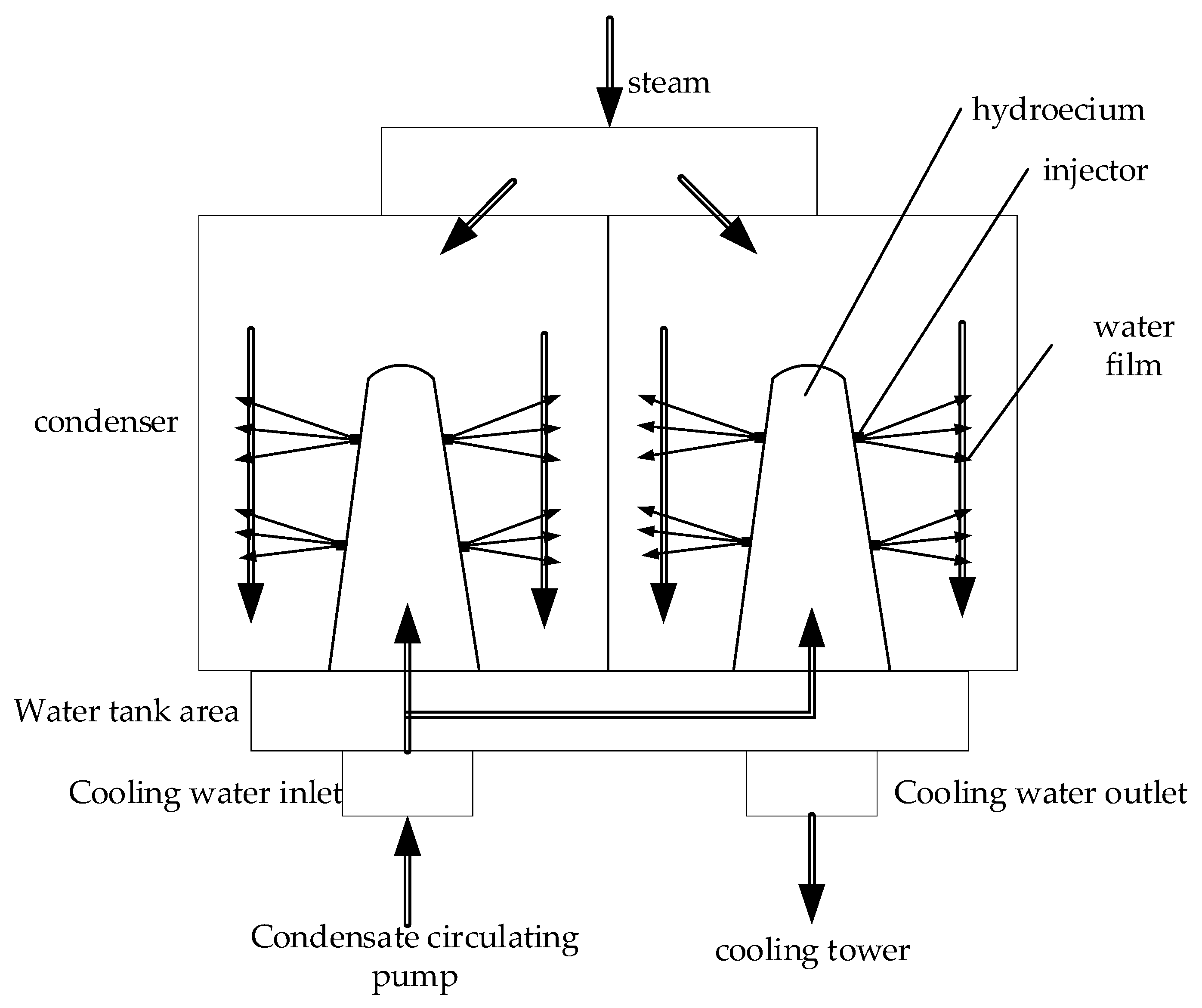
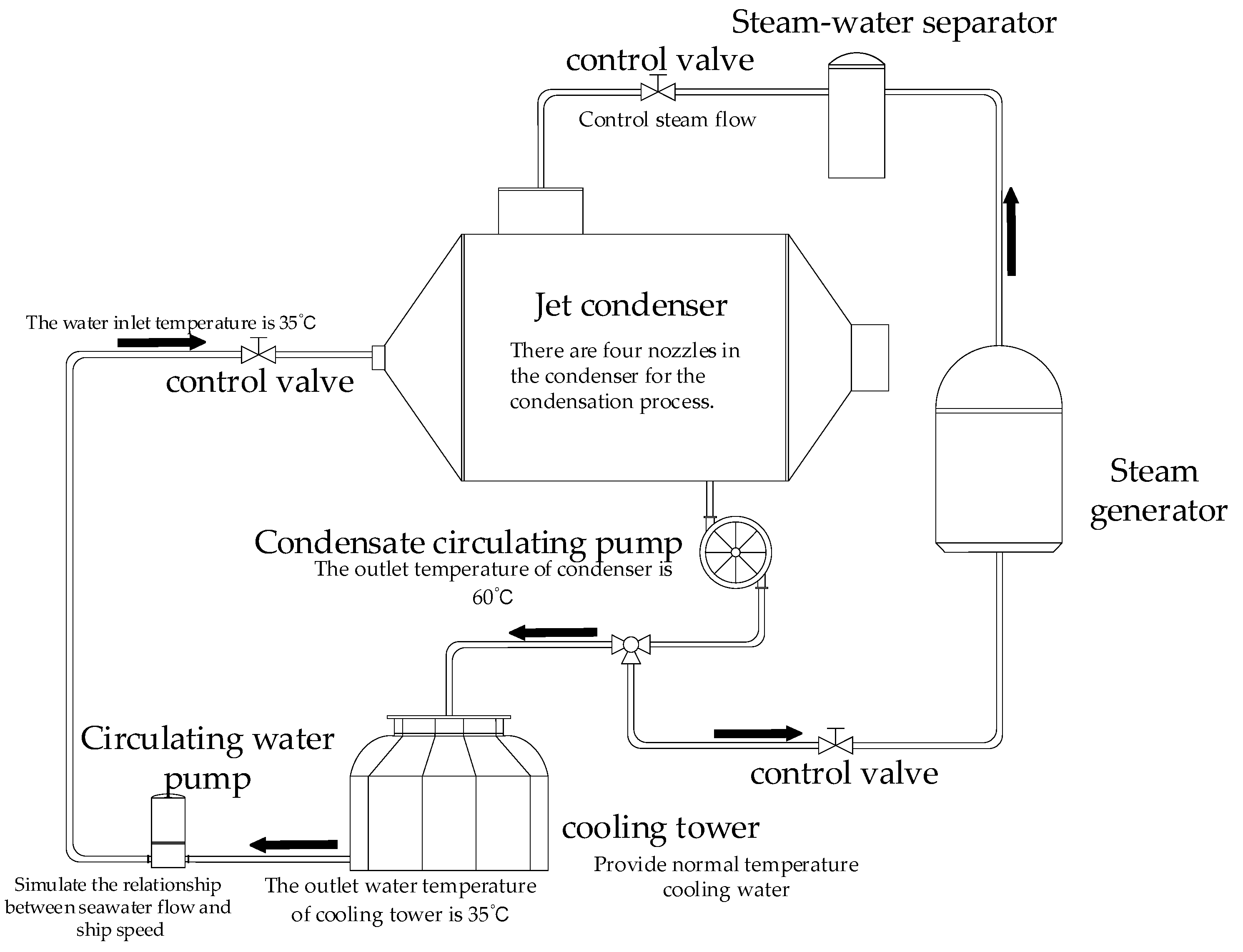
2.1. Introduction to the Principle of Jet Condenser
2.2. Introduction to Ship Operating Conditions
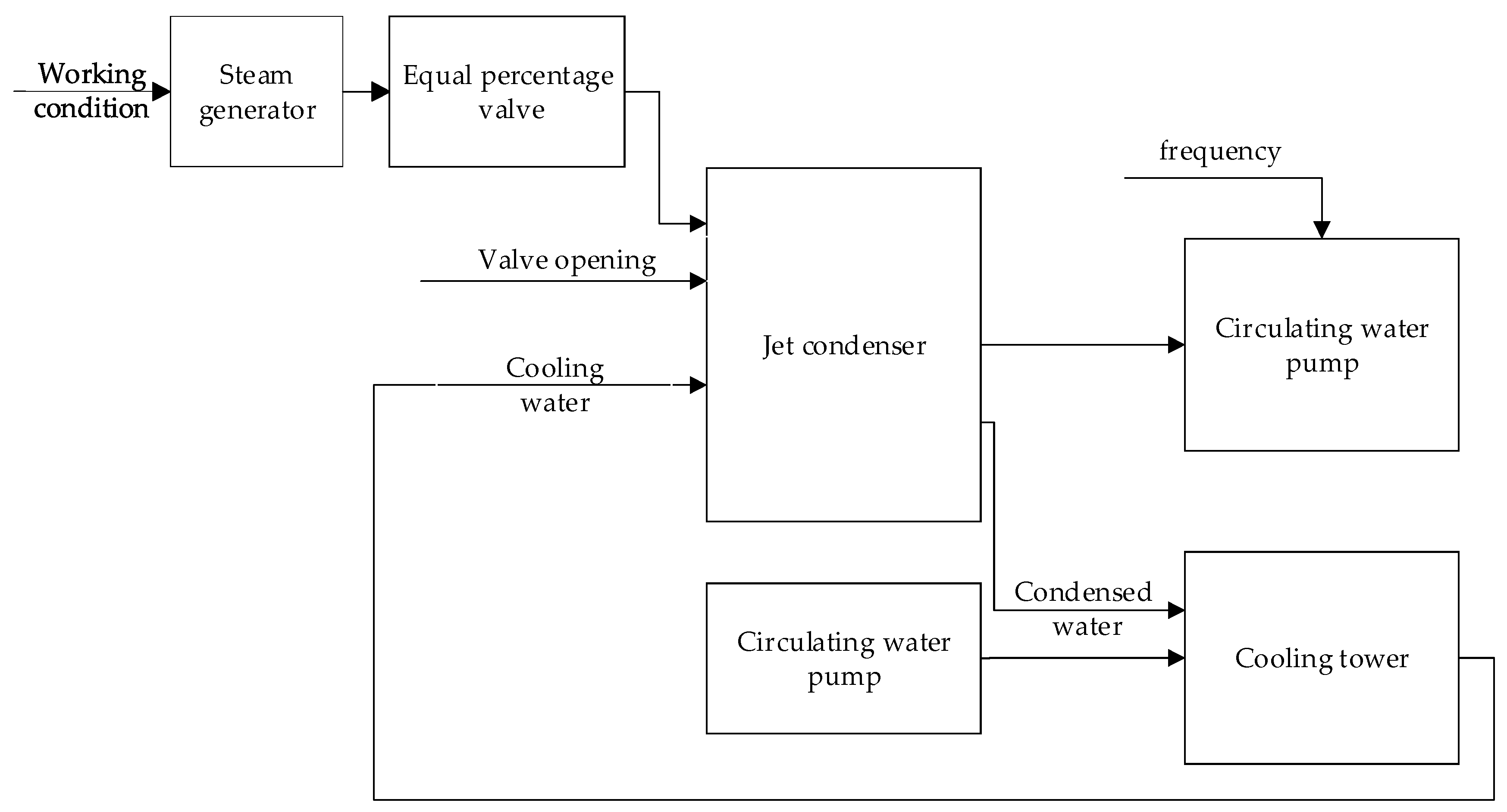
2.3. Overall Design of the Low Power Consumption New Cooling System
3. System Modeling
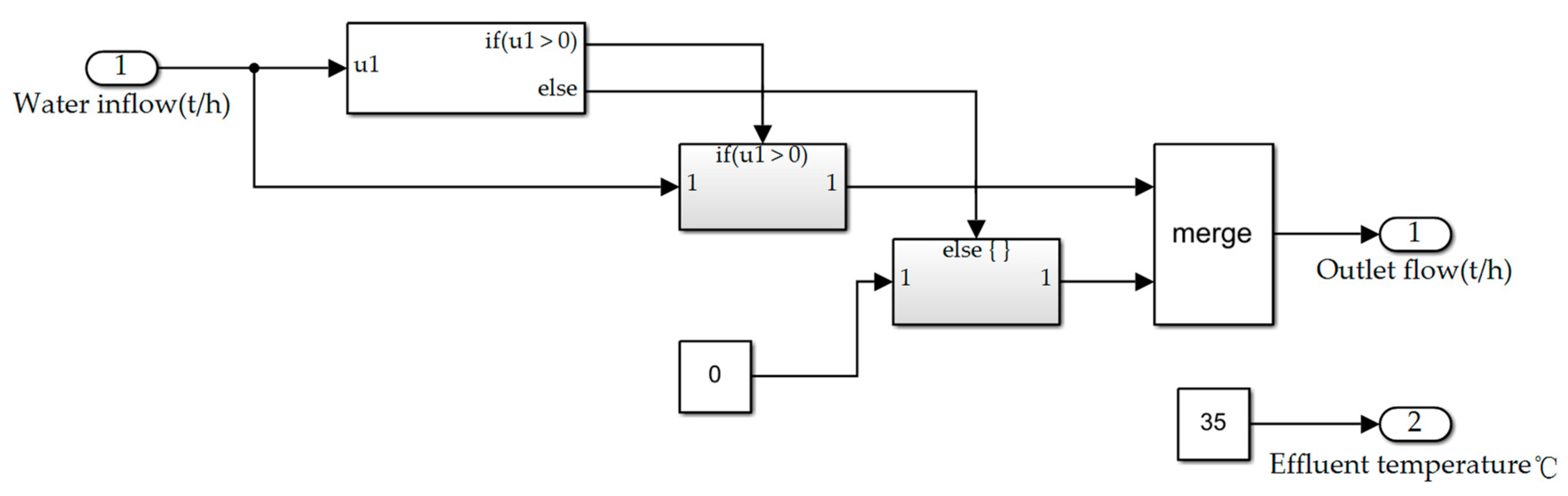
3.1. Jet Condenser Modeling
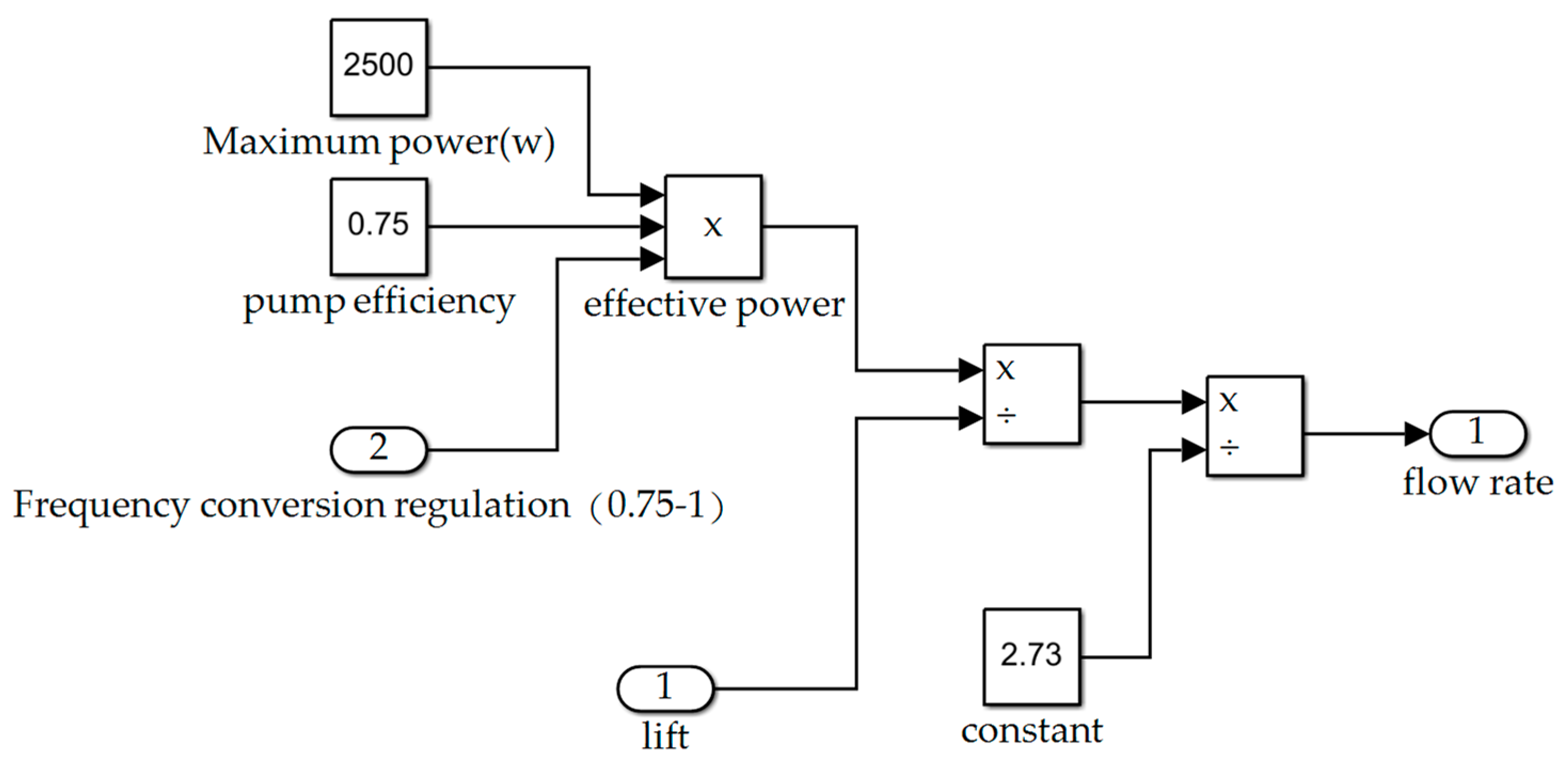
3.2. Circulating Water Pump Modeling
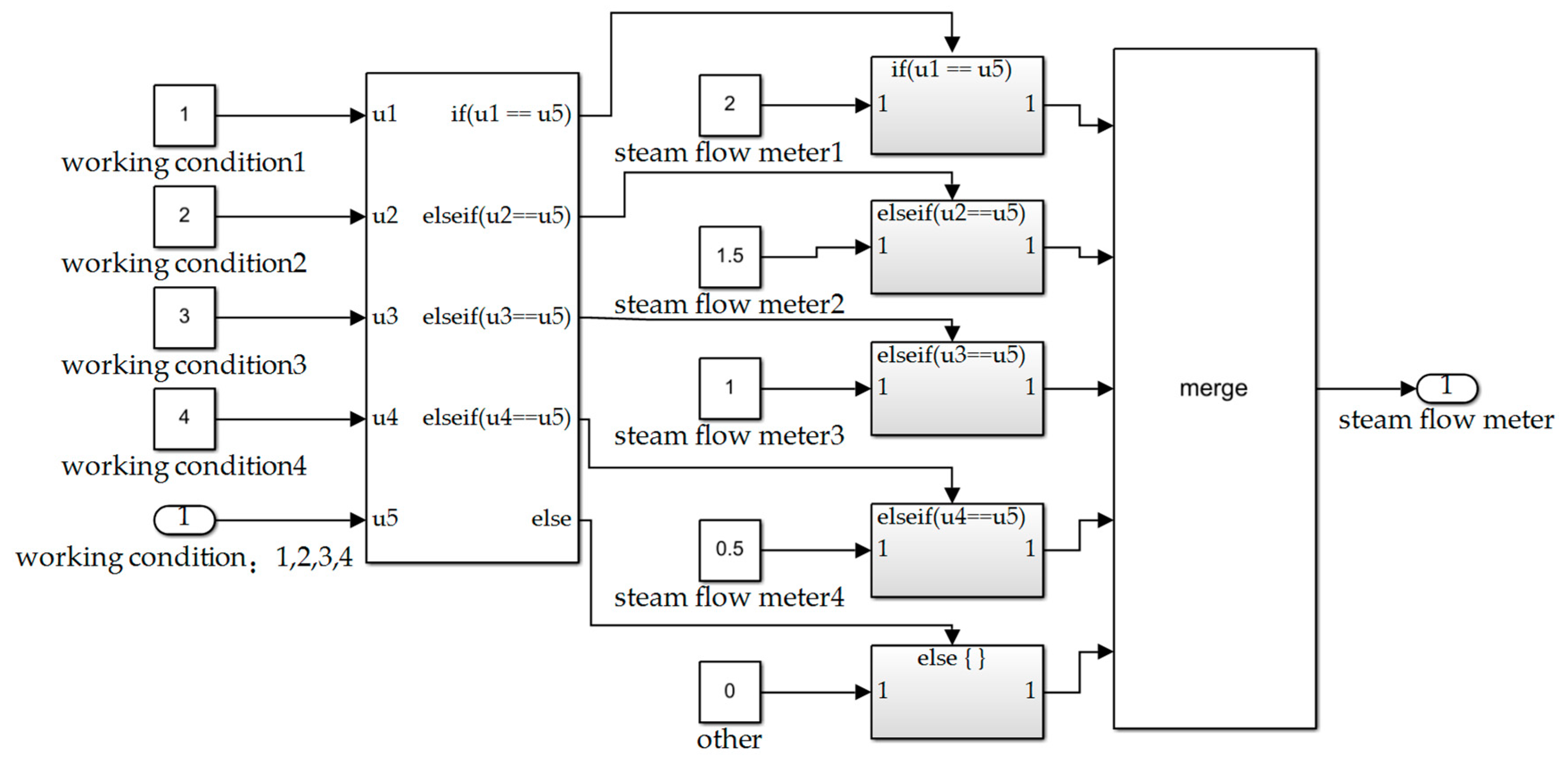
3.3. Steam Generator Modeling
3.4. Cooling Tower Modeling
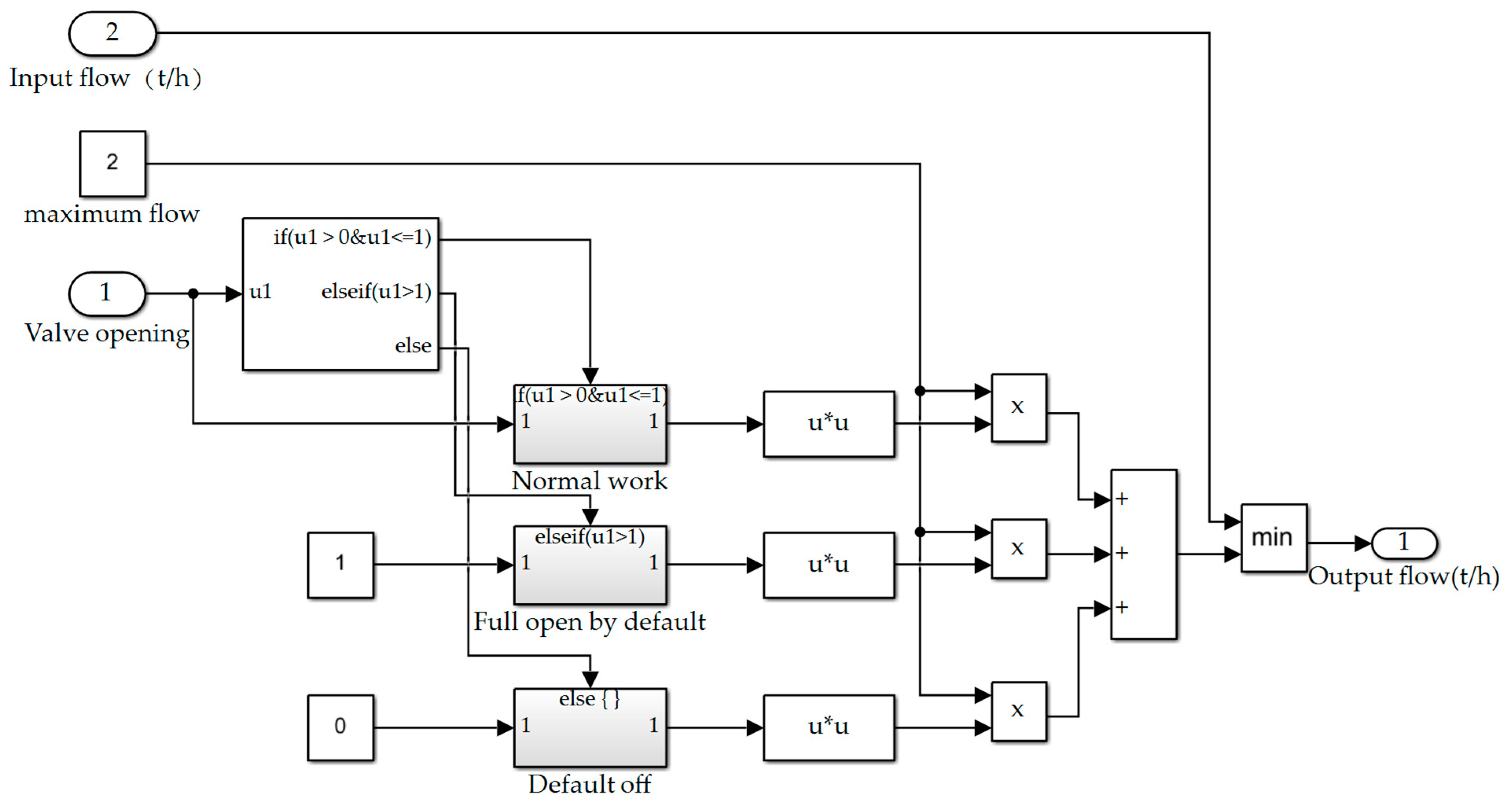
3.5. Equal Percentage Valve Modeling
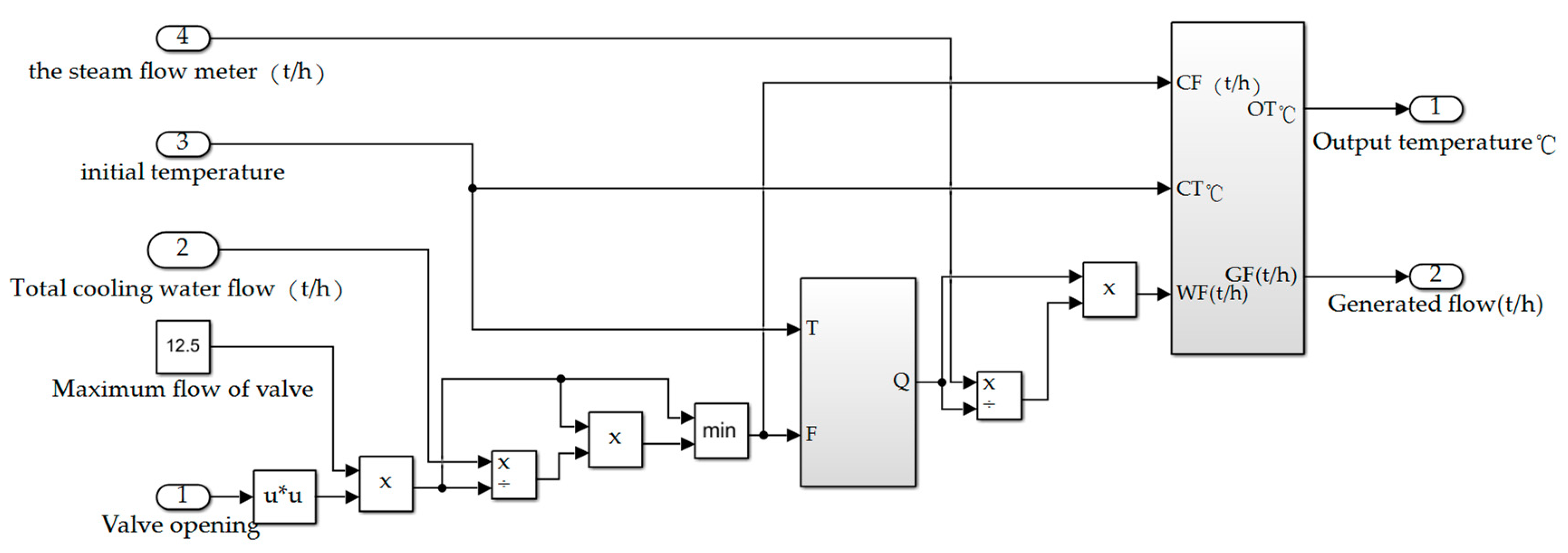
3.6. Overall System Modeling
4. Control System Design
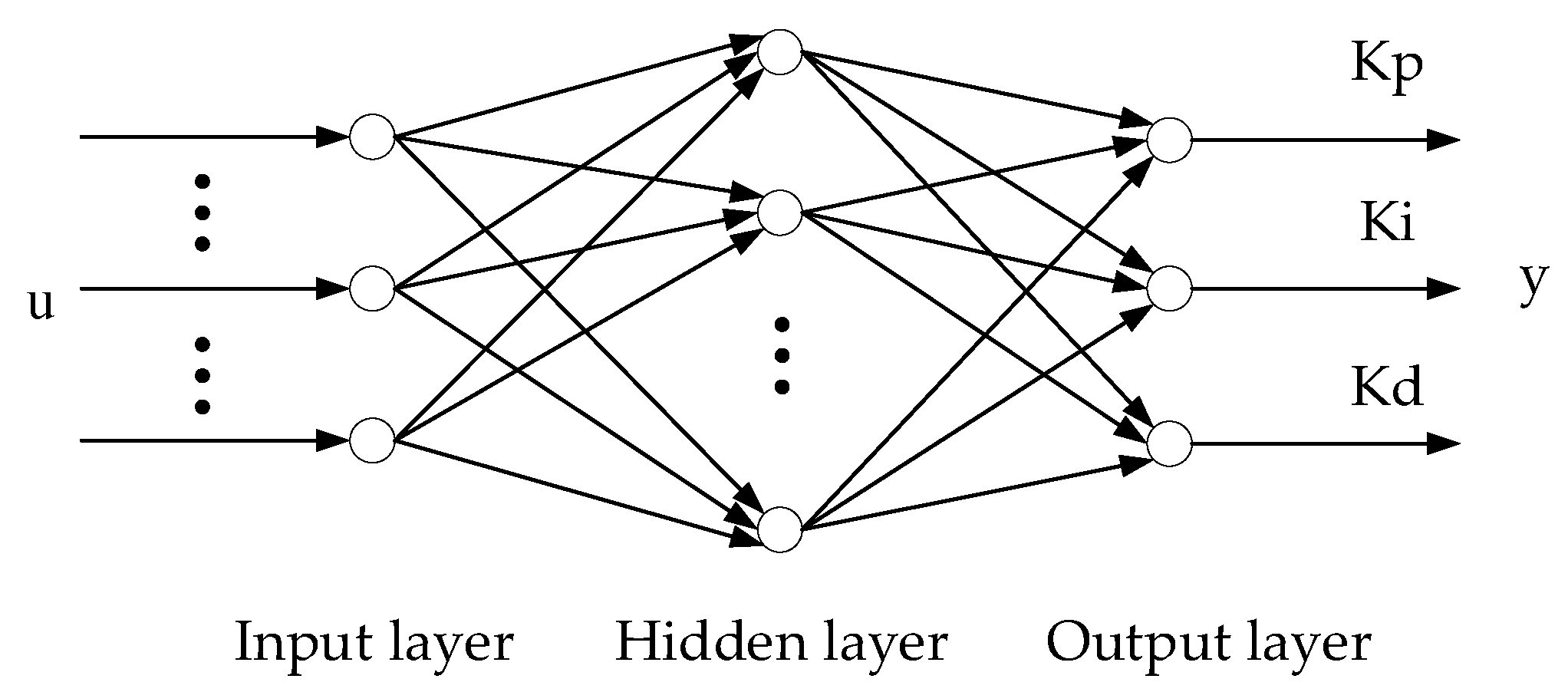
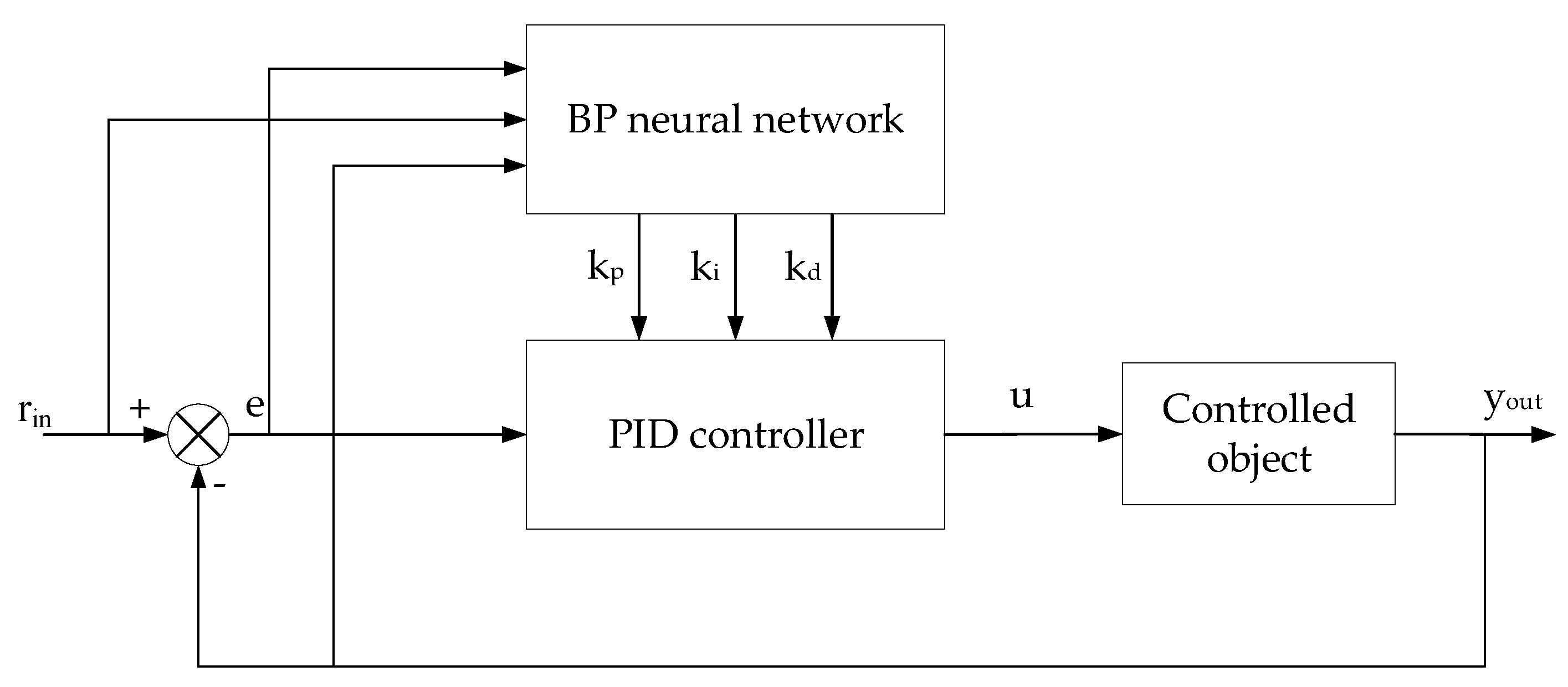
4.1. Introduction of th BP Neural Network PID Control Theory
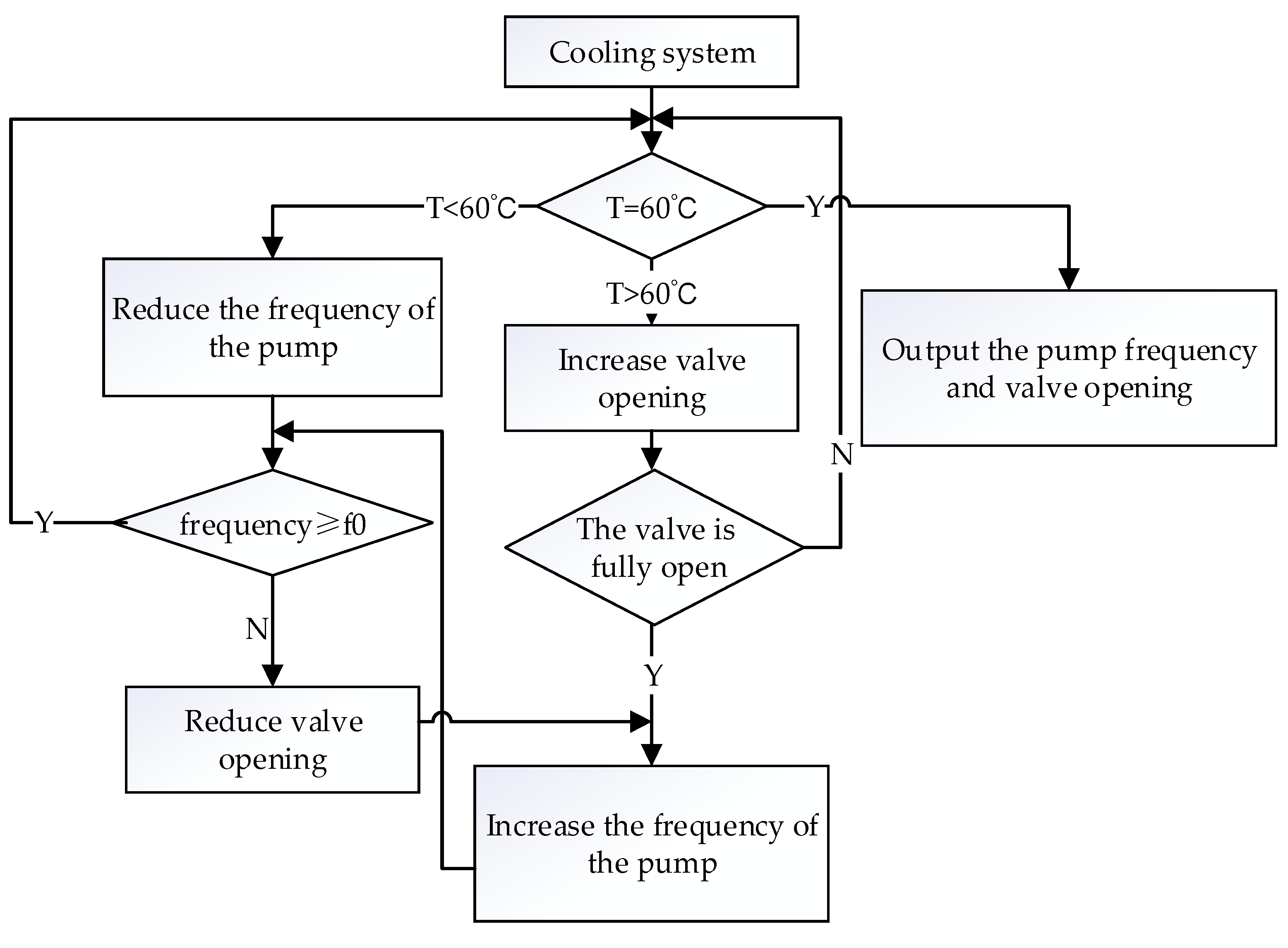
4.2. Cooling System Control Scheme
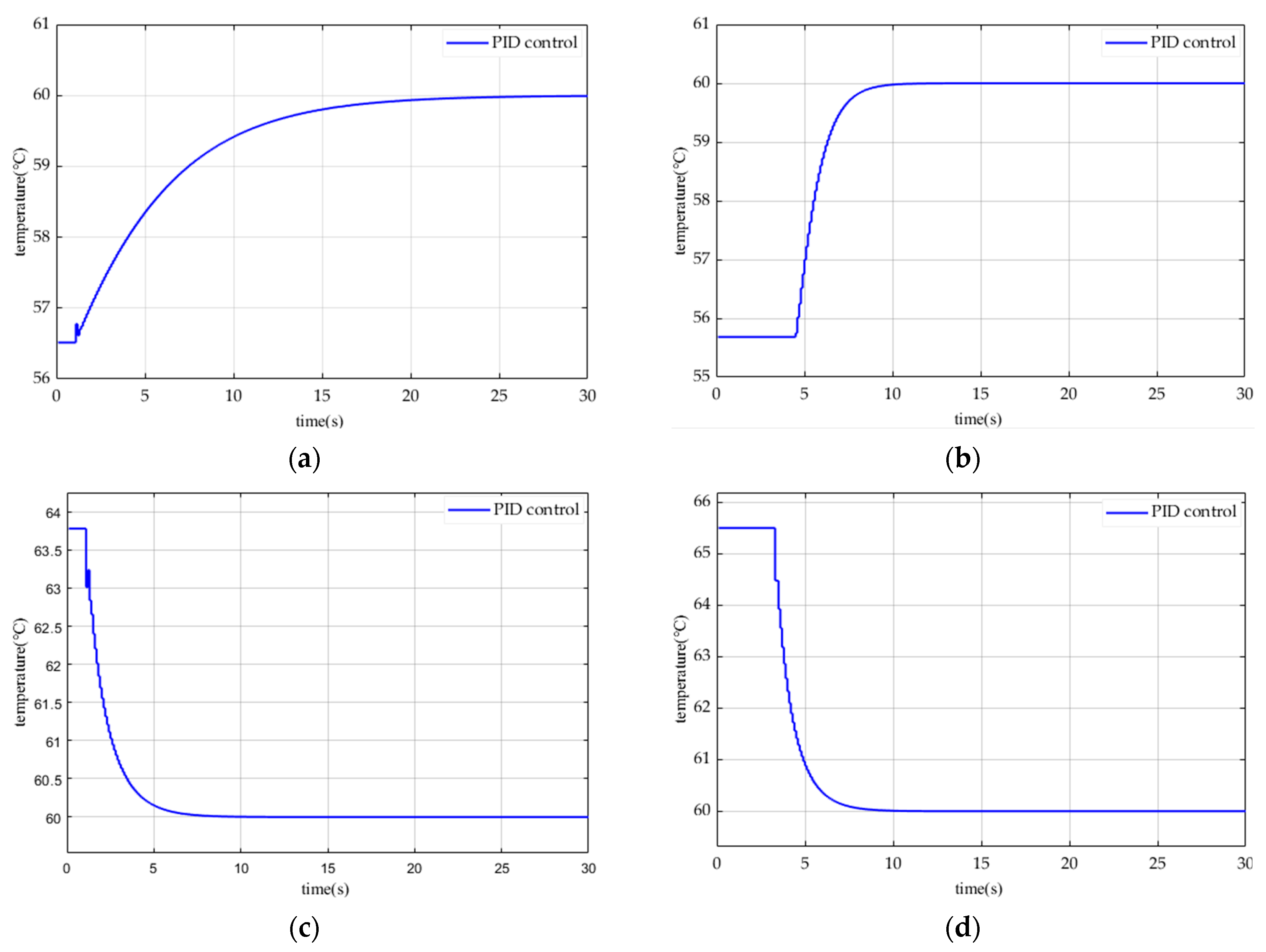
4.3. Design of Ship Cooling Control System Based on PID Algorithm
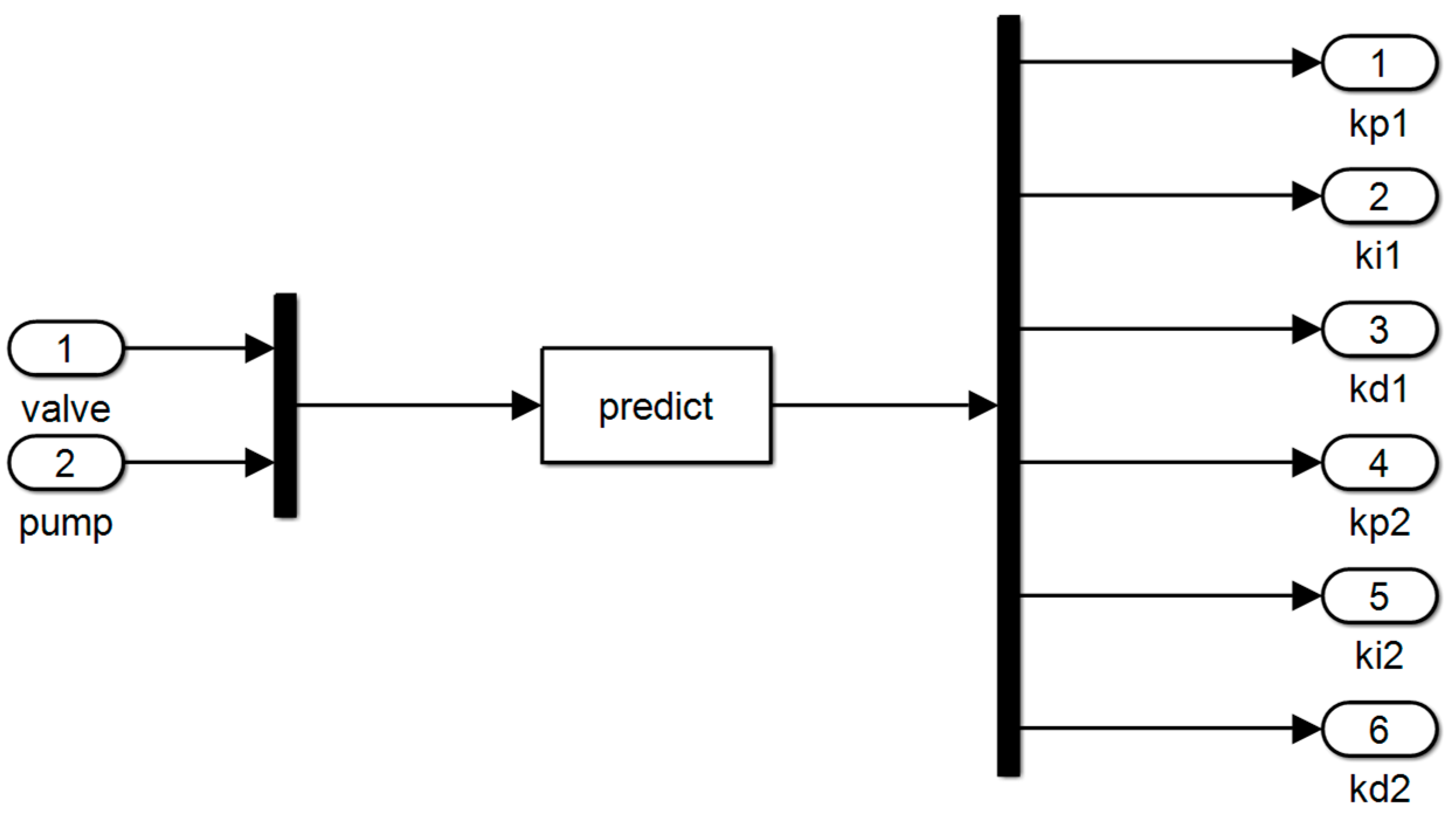
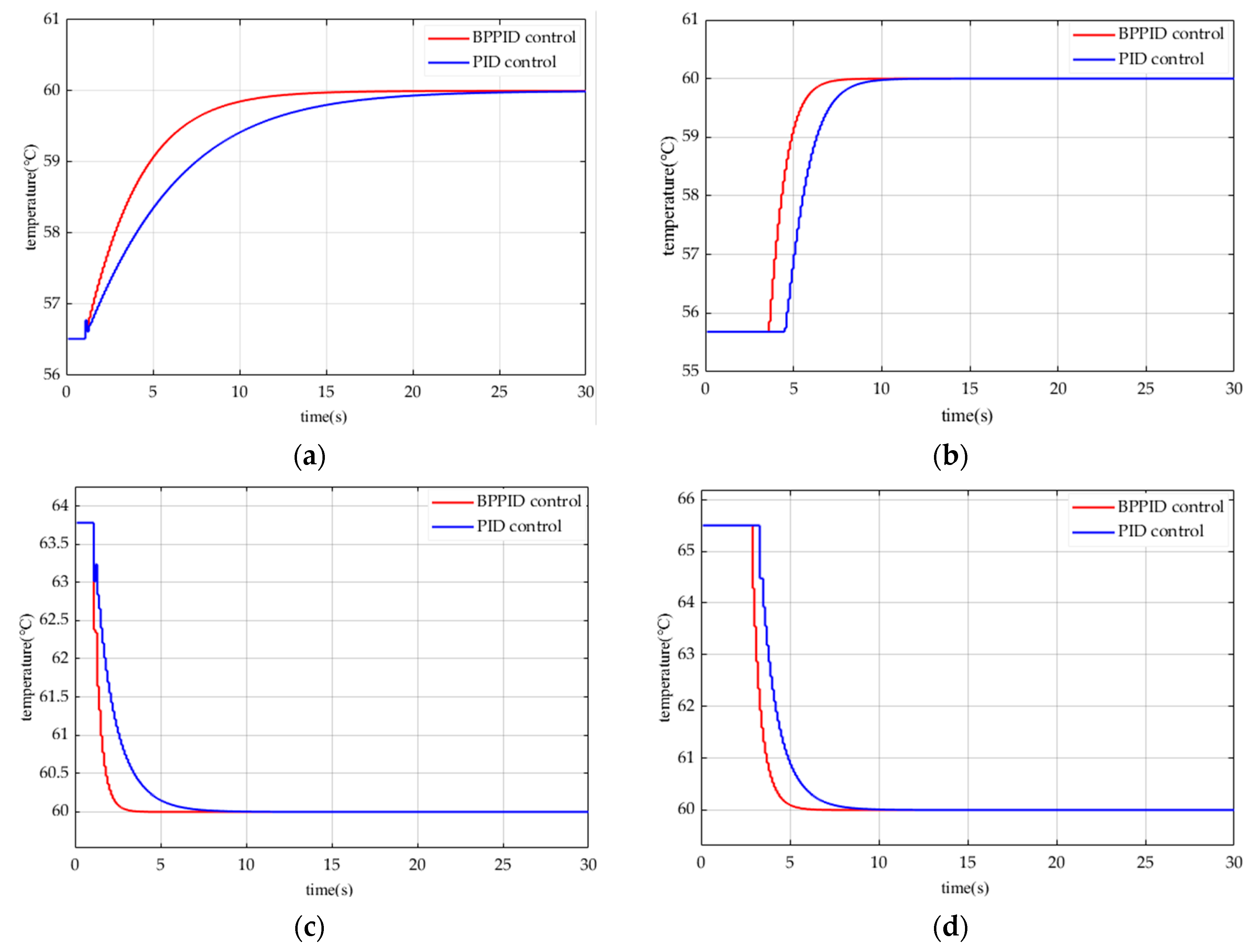
4.4. Design of Ship Cooling Control System Based on BP Neural Network
5. Summary
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Qi, X.; Jiao, J.; Tang, T.; Chu, Y.; Shi, S. Study on Optimize Design of Central Cooling System. In Proceedings of the IEEE 2nd Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Chengdu, China, 15–17 December 2017; pp. 1512–1515. [Google Scholar]
- Liu, J.F.; Wang, J.; Li, G.P. Analysis of energy saving technology for Central Air Conditioning water system operation. In Proceedings of the International Conference on Mechanical Design and Simulation (MDS), Wuhan, China, 18–20 March 2022. [Google Scholar]
- Hunt, K.J.; Sbarbaro, D.; Zbikowski, R.; Gawthrop, P.J. Neural Networks for Control-Systems—A Survey. Automatica 1992, 28, 1083–1112. [Google Scholar] [CrossRef]
- Wang, H.; Wang, F.; Huang, Y.; Zhang, L. The Research of Energy-saving in Air Conditioning Water Cooling System by Frequency conversion Pump and Constant Pressure Control. In Proceedings of the 2nd International Conference on Mechanics and Control Engineering (ICMCE 2013), Beijing, China, 1–2 September 2013; pp. 1207–1210. [Google Scholar]
- Theotokatos, G.; Sfakianakis, K.; Vassalos, D. Investigation of ship cooling system operation for improving energy efficiency. J. Mar. Sci. Technol. 2017, 22, 38–50. [Google Scholar] [CrossRef]
- Li, T.Y.; Chen, L.; Jensen, C.S.; Pedersen, T.B.; Gao, Y.; Hu, J.; Soc, I.C. Evolutionary Clustering of Moving Objects. In Proceedings of the 38th IEEE International Conference on Data Engineering (ICDE), Kuala Lumpur, Malaysia, 9–11 May 2022; pp. 2399–2411. [Google Scholar]
- Yang, J. Fuzzy Control for Variable Cooling Water Flow System. In Proceedings of the International Conference on Building Materials and Structural Engineering (BMSE 2012), Wuhan, China, 19–20 March 2012; pp. 105–108. [Google Scholar]
- Teng, T.K.; Shieh, J.S.; Chen, C.S. Genetic algorithms applied in online autotuning PID parameters of a liquid-level control system. Trans. Inst. Meas. Control 2003, 25, 433–450. [Google Scholar] [CrossRef]
- Tirmizi, S.A.; Siddiqui, O.K.; Gandhidasan, P.; Zubair, S.M. Performance analysis of an ejector cooling system with a conventional chilled water system. Appl. Therm. Eng. 2014, 66, 113–121. [Google Scholar] [CrossRef]
- Firman; Anshar, M. Study on steam pressure characteristics in various types of nozzles. In Journal of Physics: Conference Series, Proceedings of the 2nd International Conference on Science (ICOS), Makassar, Indonesia, 2–3 November 2017; IOP Publishing: Bristol, UK, 2018. [Google Scholar]
- Liu, G.P.; Daley, S. Optimal-tuning PID control for industrial systems. Control Eng. Pract. 2001, 9, 1185–1194. [Google Scholar] [CrossRef]
- Eames, I.W.; Milazzo, A.; Paganini, D.; Livi, M. The design, manufacture and testing of a jet-pump chiller for air conditioning and industrial application. Appl. Therm. Eng. 2013, 58, 234–240. [Google Scholar] [CrossRef]
- Trofimov, L.I. Intensification of heat transfer in a jet condenser by additional jet splitting using a grid. Theor. Found. Chem. Eng. 2011, 45, 75–80. [Google Scholar] [CrossRef]
- Wu, G.T.; Ren, X.D.; Sun, P.Y. Modeling and simulation of cooling water system for marine main engine cylinder liner. J. Harbin Eng. Univ. 2003, 24, 376–379. [Google Scholar]
- Su, C.-L.; Chung, W.-L.; Yu, K.-T. An Energy-Savings Evaluation Method for Adjustable-Frequency Drives on Sea Water Cooling Pumps on Ships. In Proceedings of the 49th IEEE/IAS Industrial and Commercial Power Systems Technical Conference (I and CPS), Stone Mountain, GA, USA, 30 April–3 May 2013. [Google Scholar]
- Zhang, Y.; Liu, J.; Yang, T.; Liu, J.; Shen, J.; Fang, F. Dynamic modeling and control of direct air-cooling condenser pressure considering couplings with adjacent systems. Energy 2021, 236, 121487. [Google Scholar] [CrossRef]
- Chen, J.; Zhang, L.; Fu, Y.; Qian, N.; Jiang, H.; Yang, L. Heat Transfer Characteristics outside the Condenser of a Rotating Heat Pipe Grinding Wheel with a Lateral Air Impinging Jet. J. Therm. Sci. 2021, 30, 493–503. [Google Scholar] [CrossRef]
- Wang, J.; Wang, H.; Zhang, H.; Meng, X.-p. Applications of Immune Genetic Algorithm in Frequency Speed Control Pumping Station. In Proceedings of the IEEE International Conference on Automation and Logistics, Shenyang, China, 5–7 August 2009; pp. 1203–1207. [Google Scholar]
- Bajsic, I.; Bobic, M. Gain of a control valve with polygonal flow characteristics. Stroj. Vestn.-J. Mech. Eng. 2000, 46, 264–275. [Google Scholar]
- Jin, W.; Gao, W.Z.; Gu, S.S.; Wang, F.L. PID-Like controller using a modified neural network. Int. J. Syst. Sci. 1997, 28, 809–815. [Google Scholar] [CrossRef]
- Hovakimyan, N.; Nardi, F.; Calise, A.; Kim, N. Adaptive output feedback control of uncertain nonlinear systems using single-hidden-layer neural networks. IEEE Trans. Neural Netw. 2002, 13, 1420–1431. [Google Scholar] [CrossRef]
- Su, C.-L.; Chung, W.-L.; Yu, K.-T. An Energy-Savings Evaluation Method for Variable-Frequency-Drive Applications on Ship Central Cooling Systems. IEEE Trans. Ind. Appl. 2014, 50, 1286–1294. [Google Scholar] [CrossRef]
- Madhiarasan, M.; Deepa, S.N. A novel criterion to select hidden neuron numbers in improved back propagation networks for wind speed forecasting. Appl. Intell. 2016, 44, 878–893. [Google Scholar] [CrossRef]
- Wang, H.; Chang, W.-l. Load Forecasting for Electrical Power System Based on BP Neural Network. In Proceedings of the 1st International Workshop on Education Technology and Computer Science, Wuhan, China, 7–8 March 2009; pp. 702–705. [Google Scholar]
- Li, T.; Huang, R.; Chen, L.; Jensen, C.S.; Pedersen, T.B. Compression of Uncertain Trajectories in Road Networks. Proc. Vldb Endow. 2020, 13, 1050–1063. [Google Scholar] [CrossRef]
- Wang, L.X.; Wan, F. Structured neural networks for constrained model predictive control. Automatica 2001, 37, 1235–1243. [Google Scholar] [CrossRef]
- Hu, Y.; Wang, F.; Qin, L.; Gong, J.; Liu, B. Application of Fuzzy PID Control Algorithm Based on Genetic Self-tuning in Constant Temperature Incubator. In Proceedings of the 32nd Chinese Control And Decision Conference (CCDC), Hefei, China, 22–24 August 2020; pp. 171–176. [Google Scholar]
- Zhu, X.; Du, C.; Li, Z.; Wang, J.; Feng, Y. Temperature Control Optimization for Heat Pipe Based on Particle Swarm Optimization. In Proceedings of the 8th International Conference on Instrumentation and Measurement, Computer, Communication and Control (IMCCC), Harbin, China, 19–21 July 2018; pp. 920–923. [Google Scholar]
- Li, T.Y.; Chen, L.; Jensen, C.S.; Pedersen, T.B. TRACE: Real-time Compression of Streaming Trajectories in Road Networks. Proc. Vldb Endow. 2021, 14, 1175–1187. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input Variables | Output Variables | ||
|---|---|---|---|
| Variable Name | Variable Value | Variable Name | Variable Value |
| working condition | 1, 2, 3, 4 | Steam flow | 2 t/h, 1.5 t/h, 1 t/h, 0.5 t/h |
| Steam generator valve opening | 1 | Condensate outlet temperature | 60 °C |
| Valve opening of condenser water chamber | 0~1 | Outlet temperature of cooling tower | 25 °C |
| Rated head of circulating water pump | 12.5 m | Output flow of circulating water pump | Change with frequency |
| Circulating water pump frequency percentage | 0.75~1 | Output flow of condensate circulating pump | Change with frequency |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shen, S.; Liu, C.; Chen, J.; Gong, D. Design of a Low Power Condenser for Underwater Ships. Electronics 2023, 12, 3681. https://doi.org/10.3390/electronics12173681
Shen S, Liu C, Chen J, Gong D. Design of a Low Power Condenser for Underwater Ships. Electronics. 2023; 12(17):3681. https://doi.org/10.3390/electronics12173681
Chicago/Turabian StyleShen, Shijun, Chang Liu, Jiaoyuan Chen, and Dawei Gong. 2023. "Design of a Low Power Condenser for Underwater Ships" Electronics 12, no. 17: 3681. https://doi.org/10.3390/electronics12173681