
Polarization Direction of Arrival Estimation Using Dual Algorithms Based on Time-Frequency Cross Terms

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Spatial Polarimetric Time-Frequency Distribution
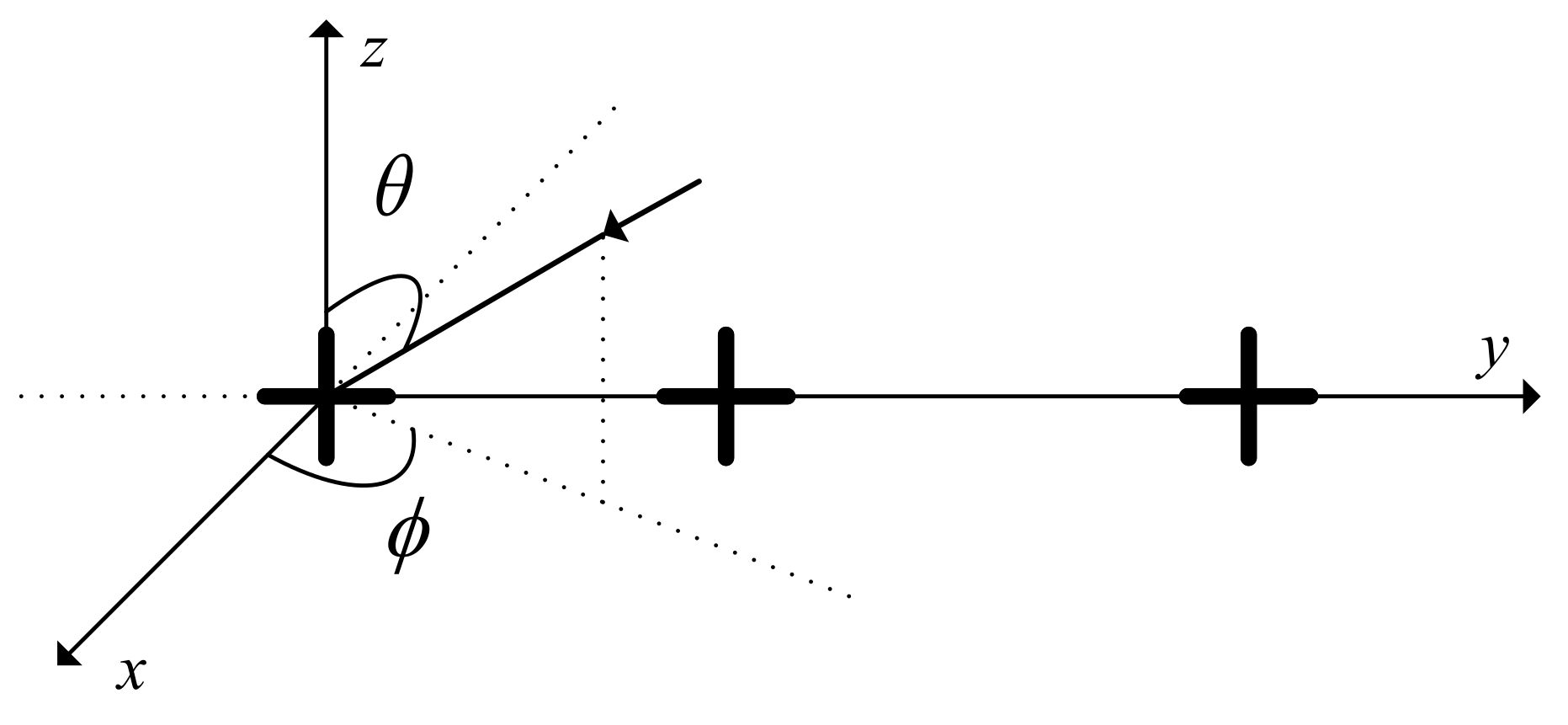
2.1. Polarization Modeling
2.2. Spatial Polarimetric Time-Frequency Distributions
3. Time-Frequency Point Selection
3.1. SPTFDs Properties
3.2. Time-Frequency Point Properties and Categorization
- (1)
- The T-F points correspond to auto terms. That is, if , thenThere is at least an nth T-F point for each N signal, such that . represents the Kronecker delta. is the value of the SPTFDs between the signals and (or ) at the T-F point.
- (2)
- The T-F points correspond to cross terms. That is,
3.3. Time-Frequency Points Selection Procedures
4. Polarimetric Time-Frequency DOA Estimation Using Dual Algorithms
5. Spatial Polarization Correlations
6. Simulations Results
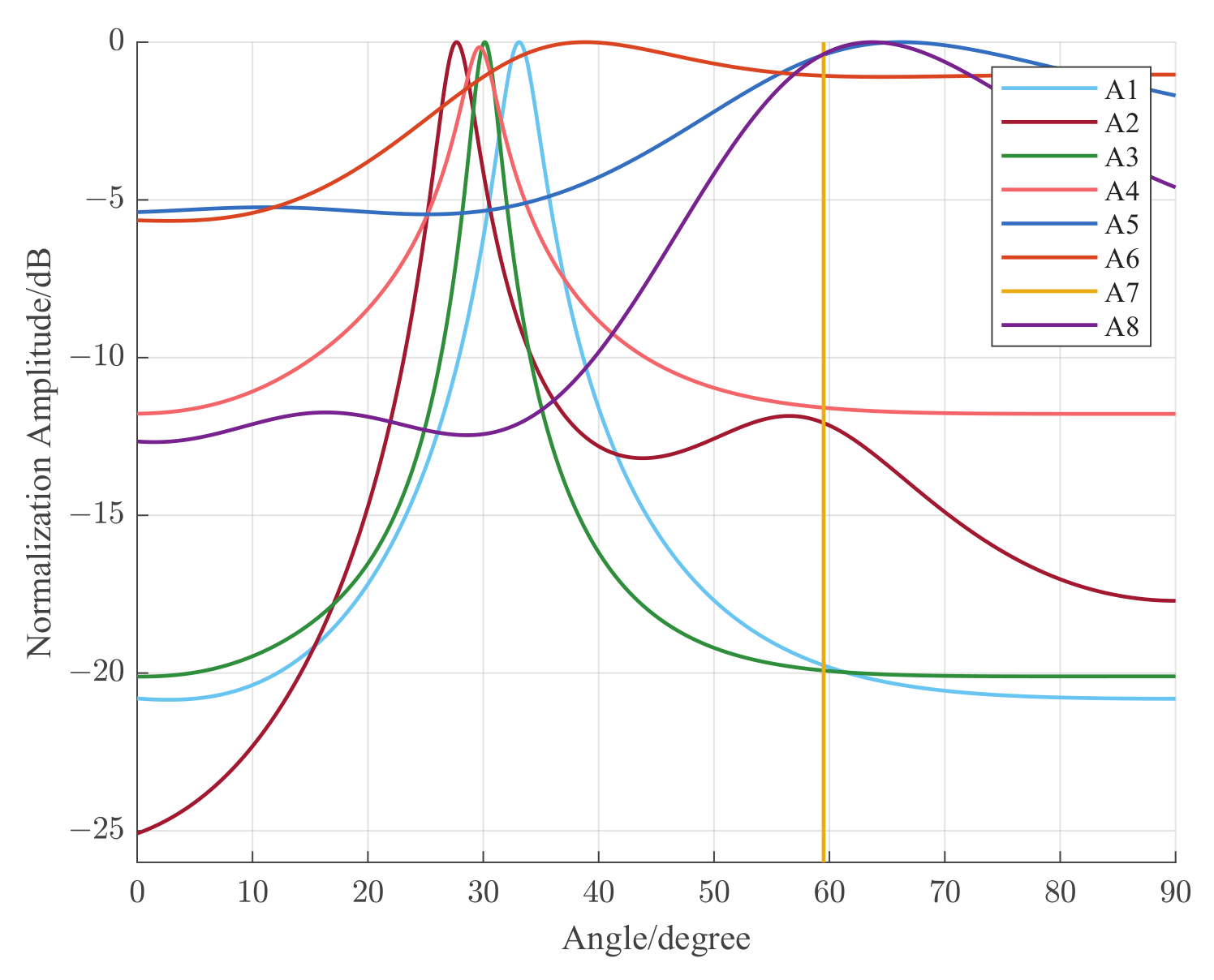
6.1. Time-Frequency Spectrum and Space Spectrum
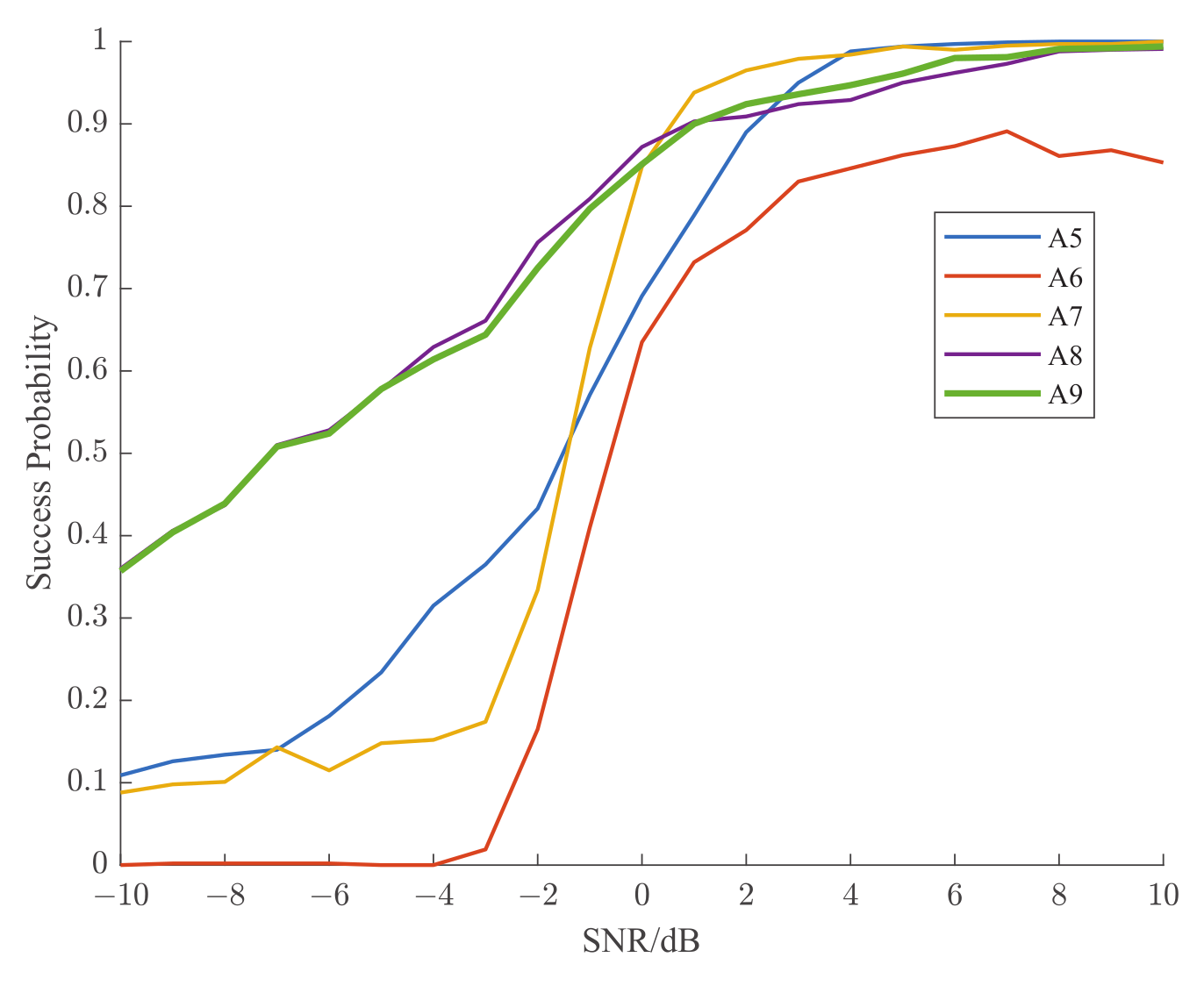
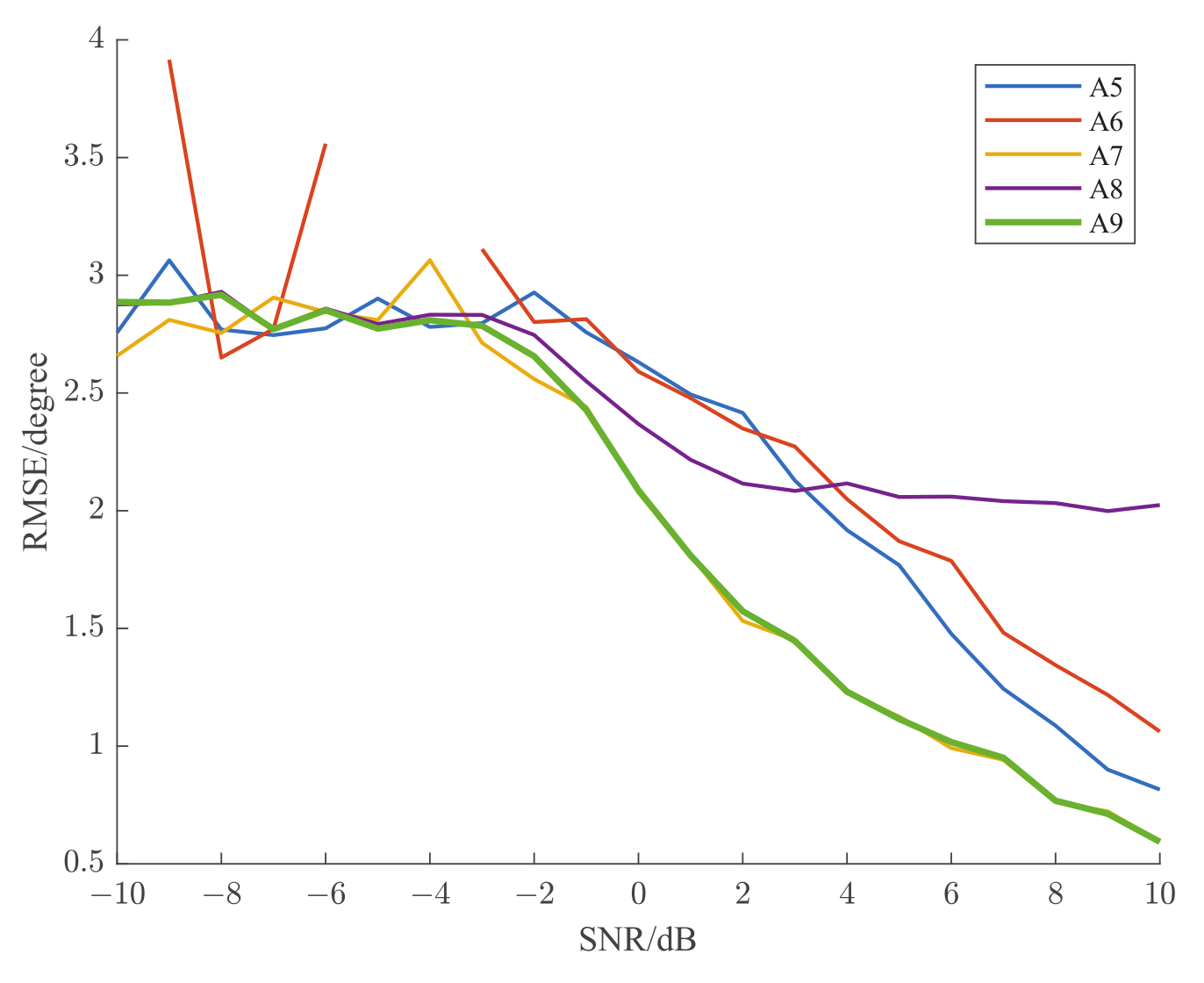
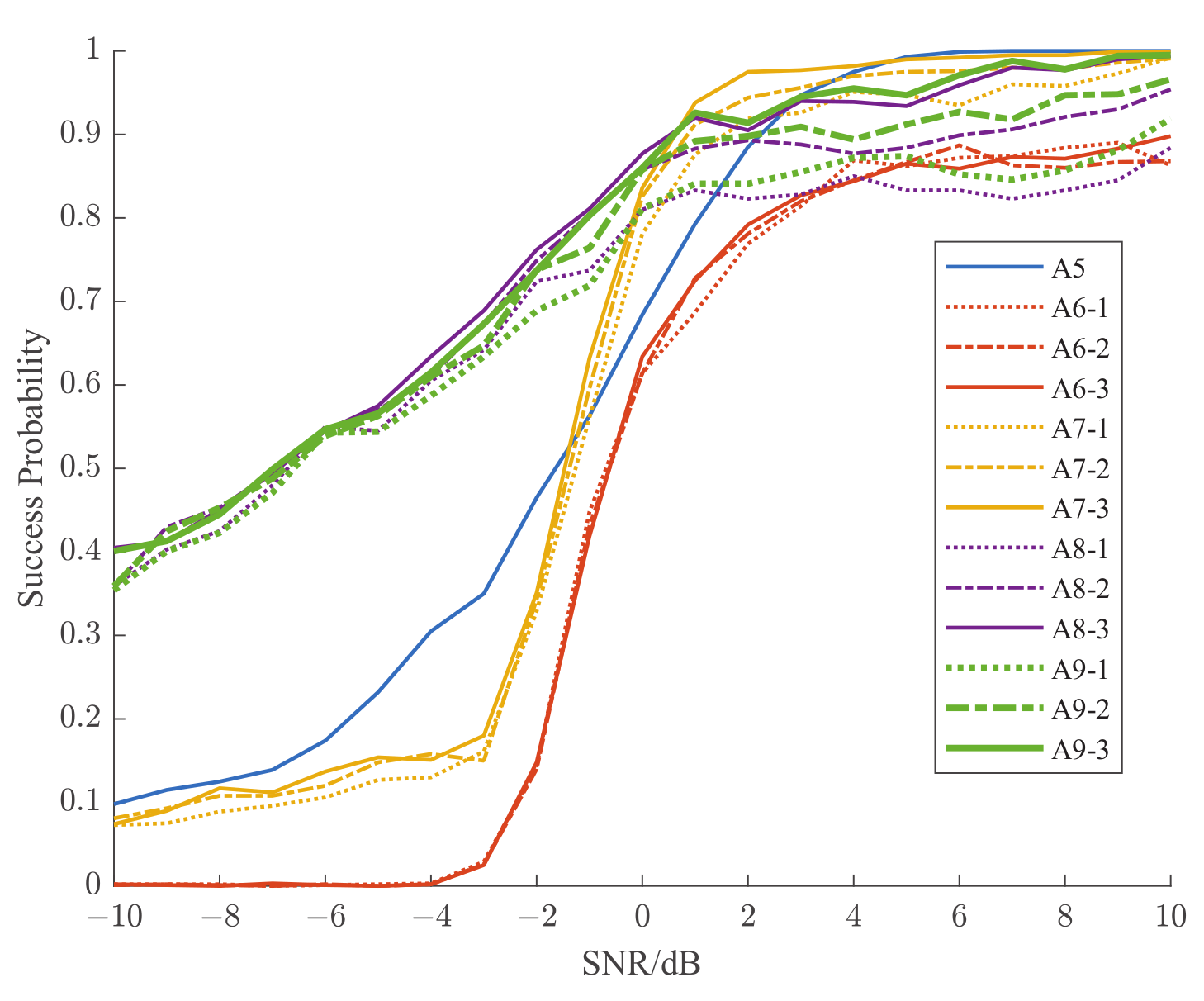
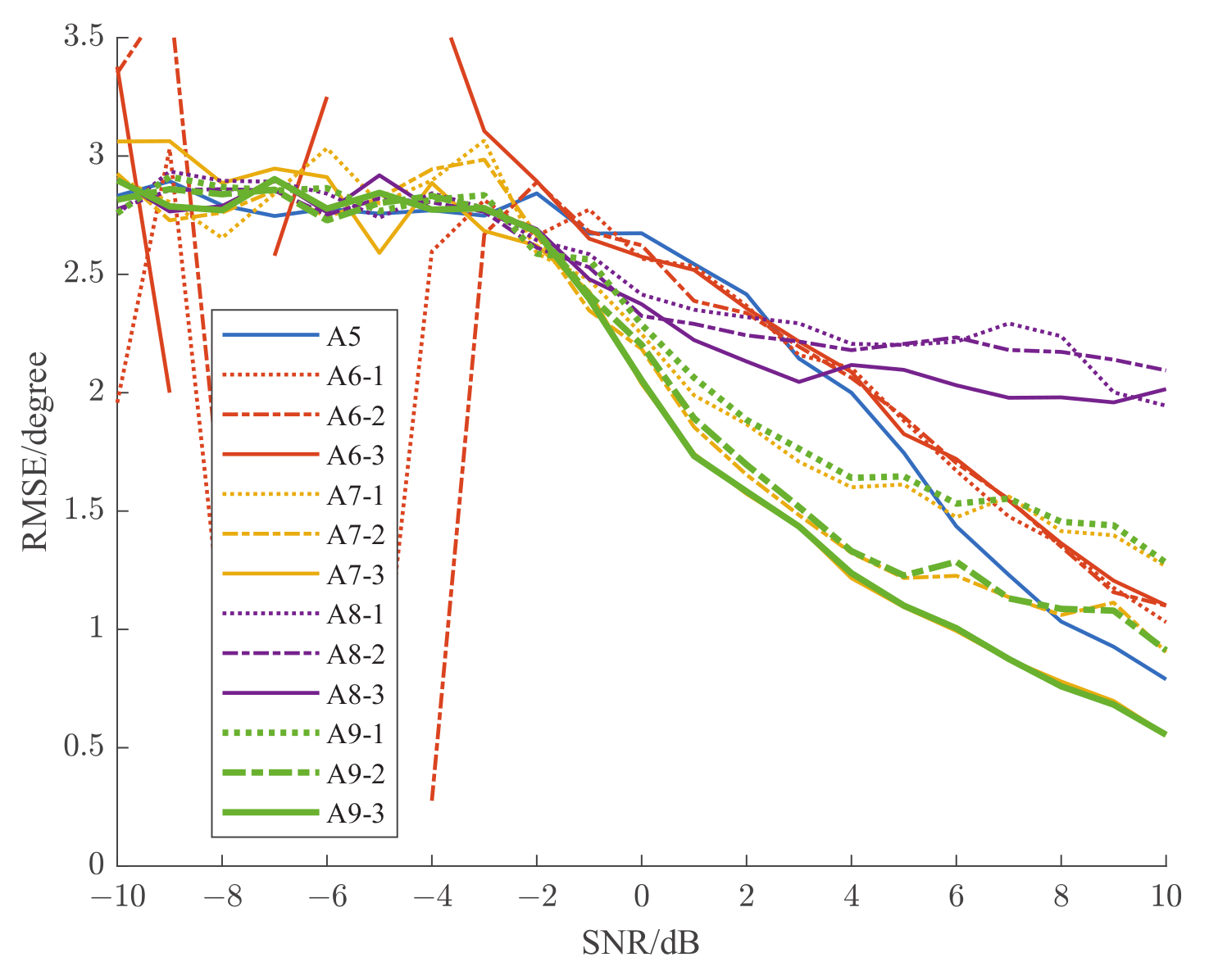
6.2. Effect of SNR on Success Rate and RMSEs
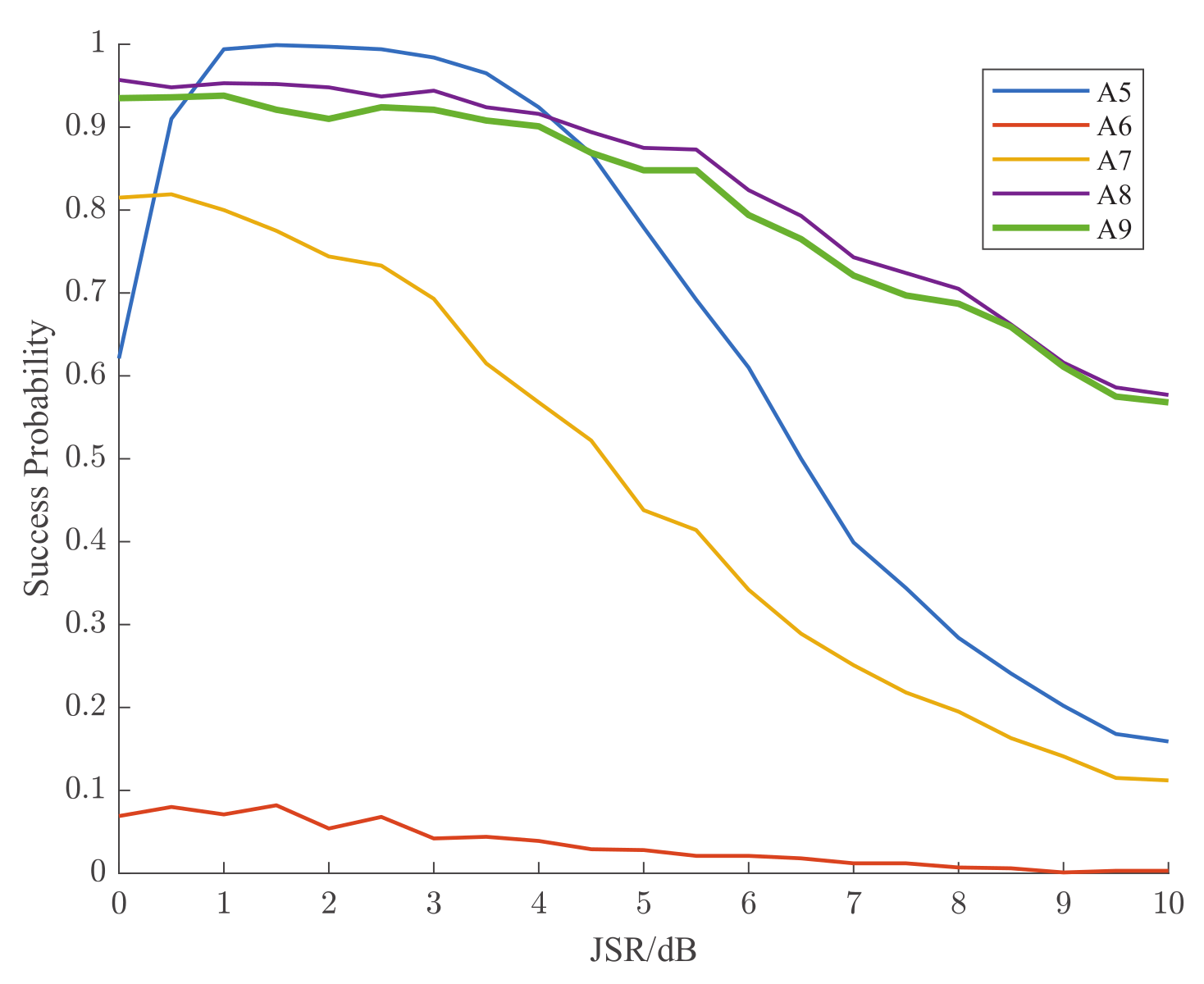
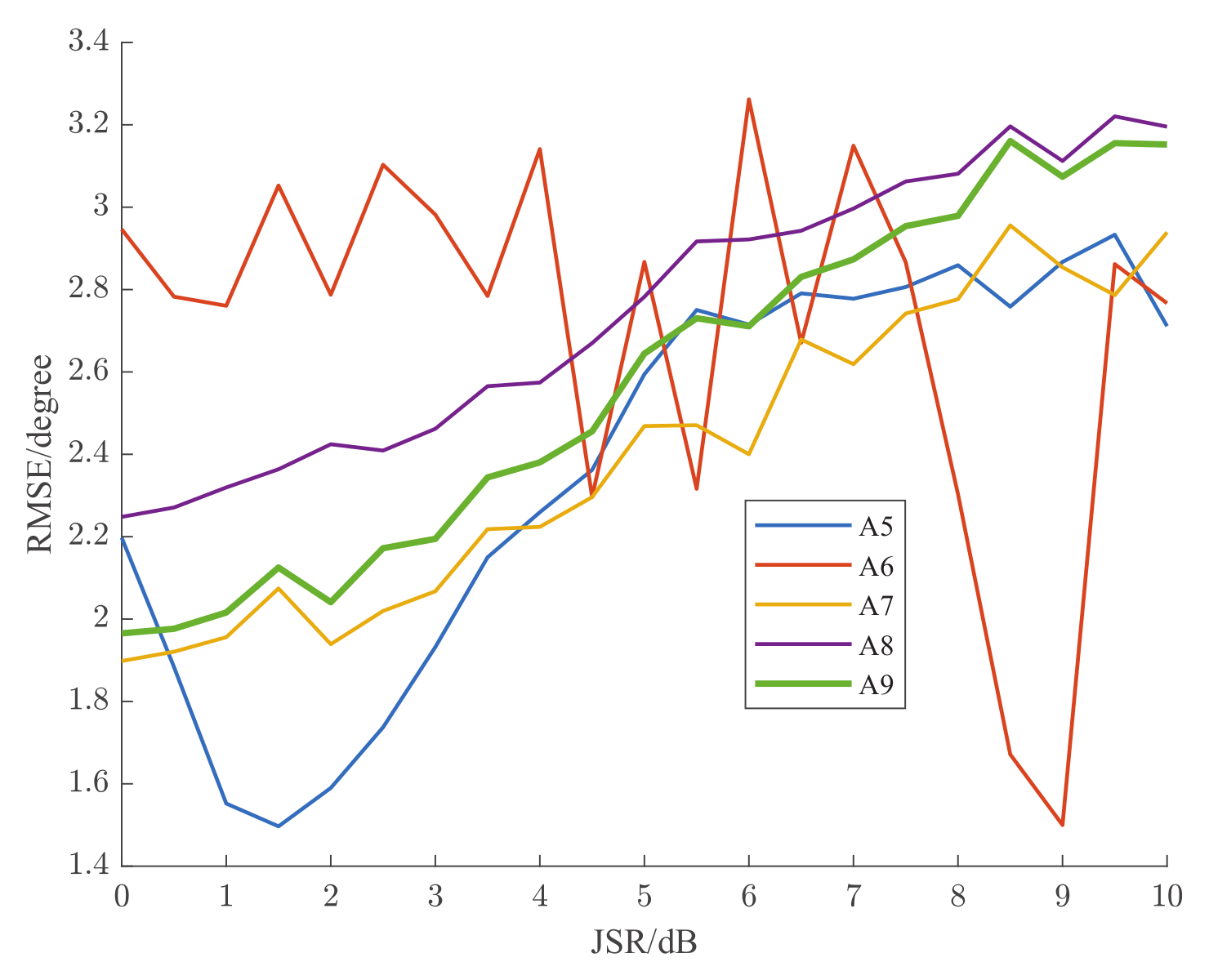
6.3. Effect of JSR on Success Rate and RMSEs
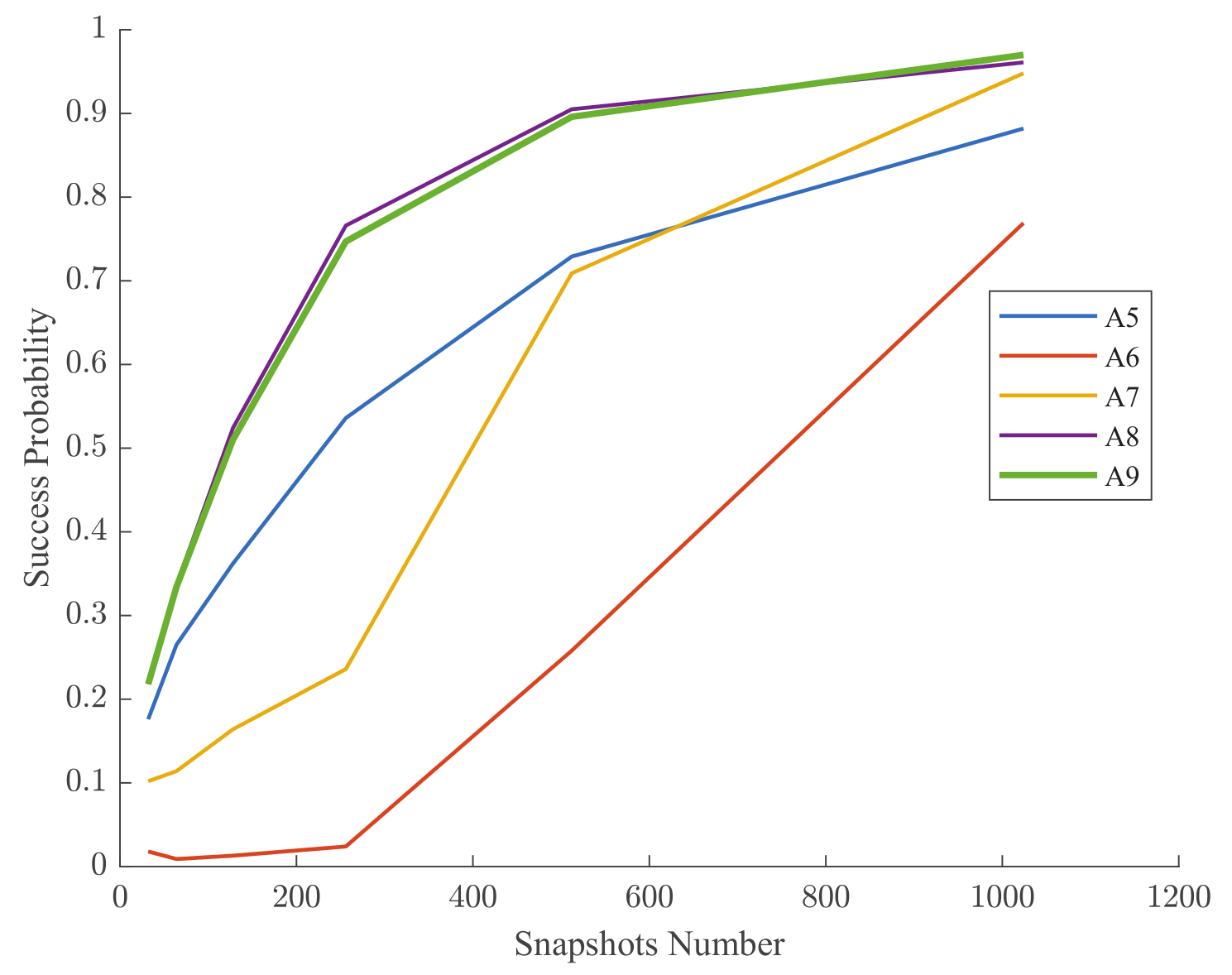
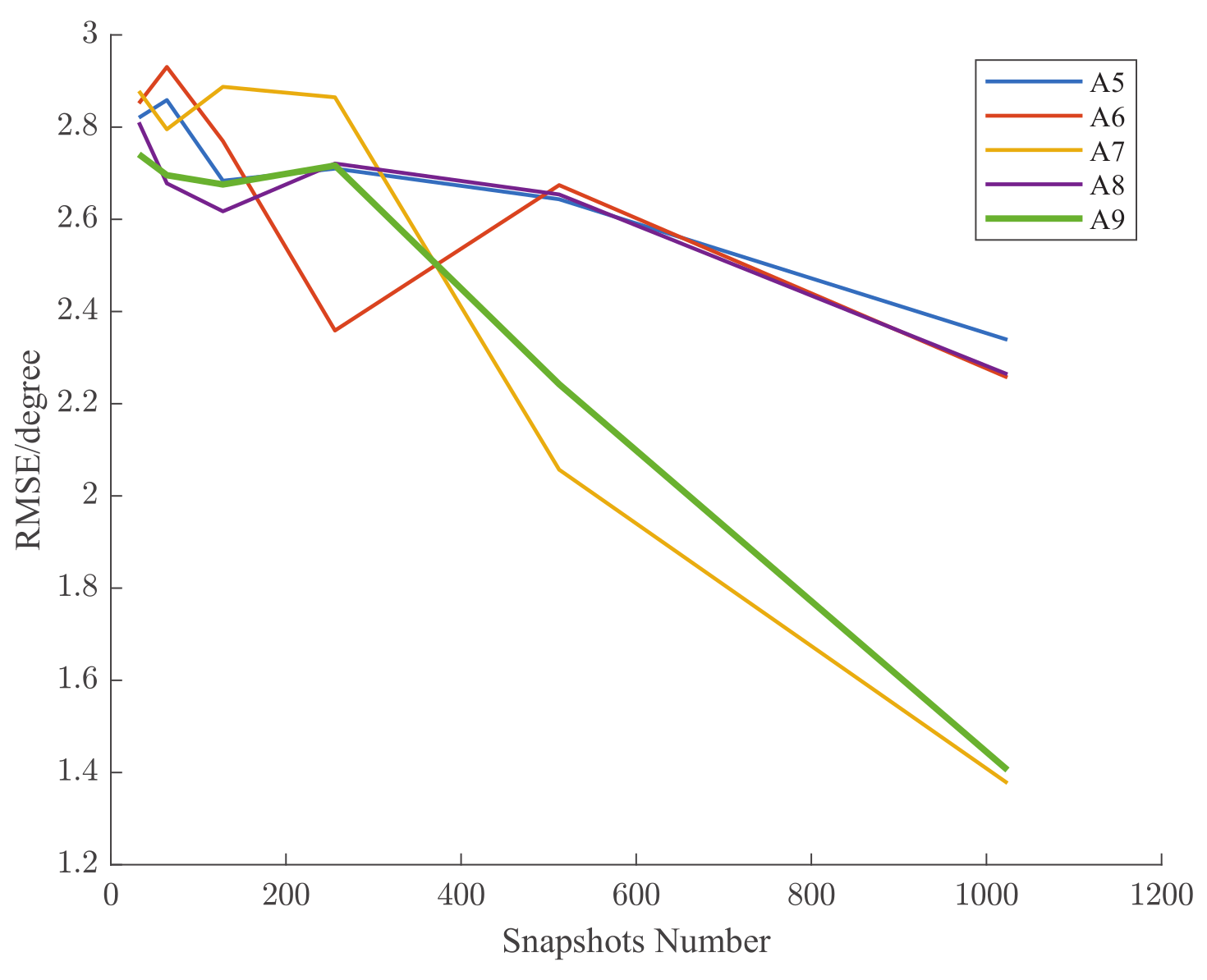
6.4. Effect of Snapshot Number on Success Rate and RMSEs
6.5. Effect of SNR and Epsilon on Success Rate and RMSEs
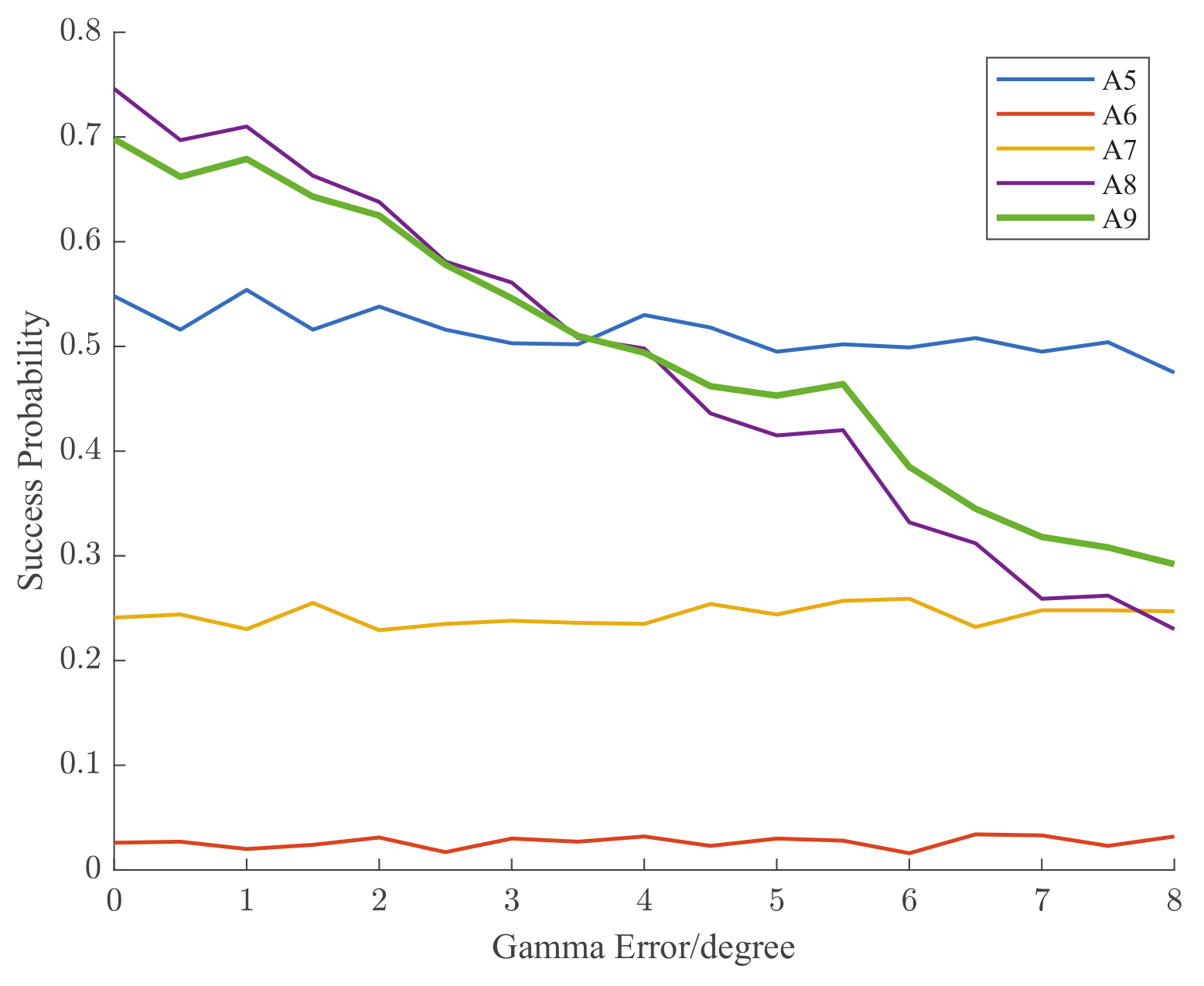
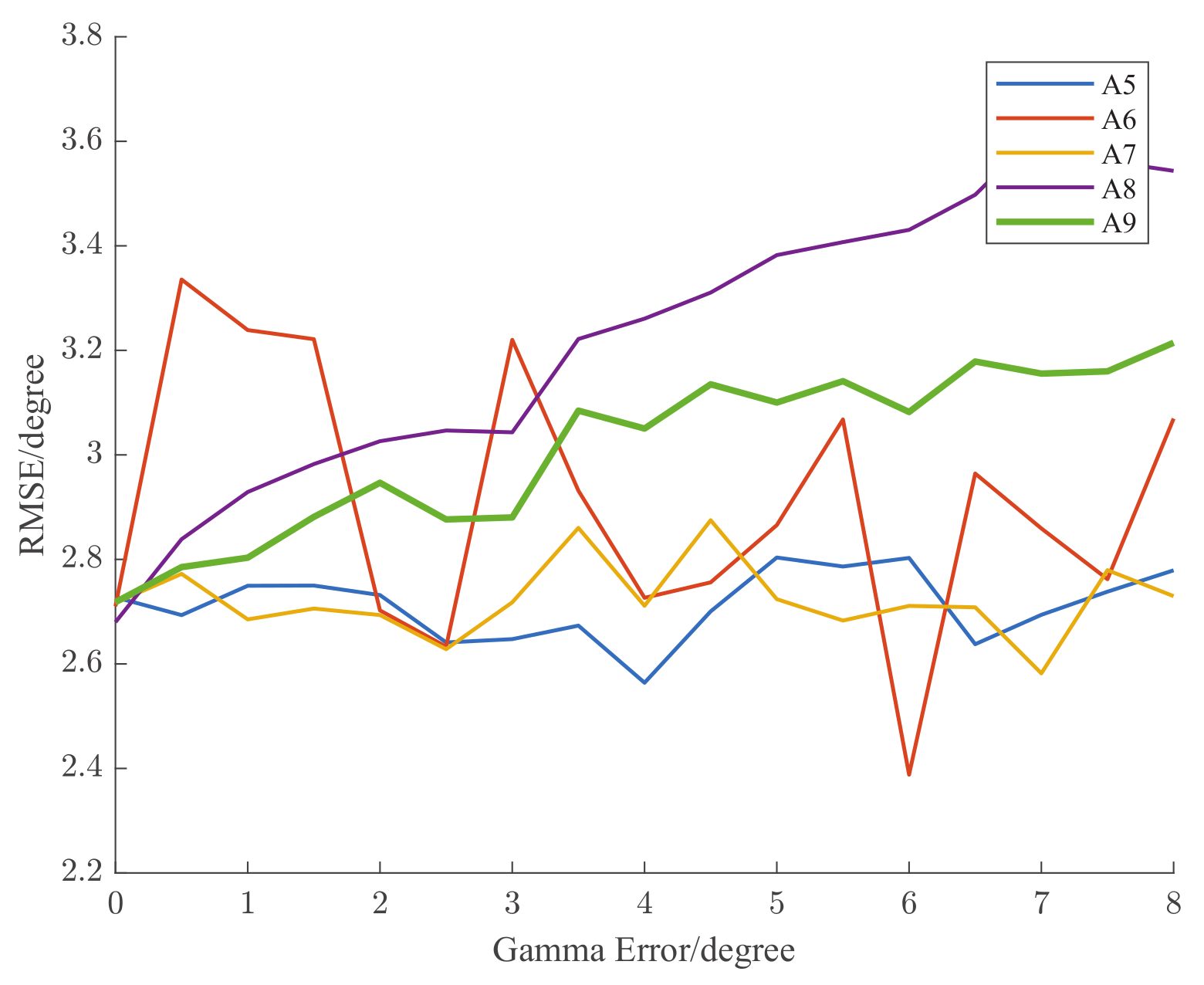
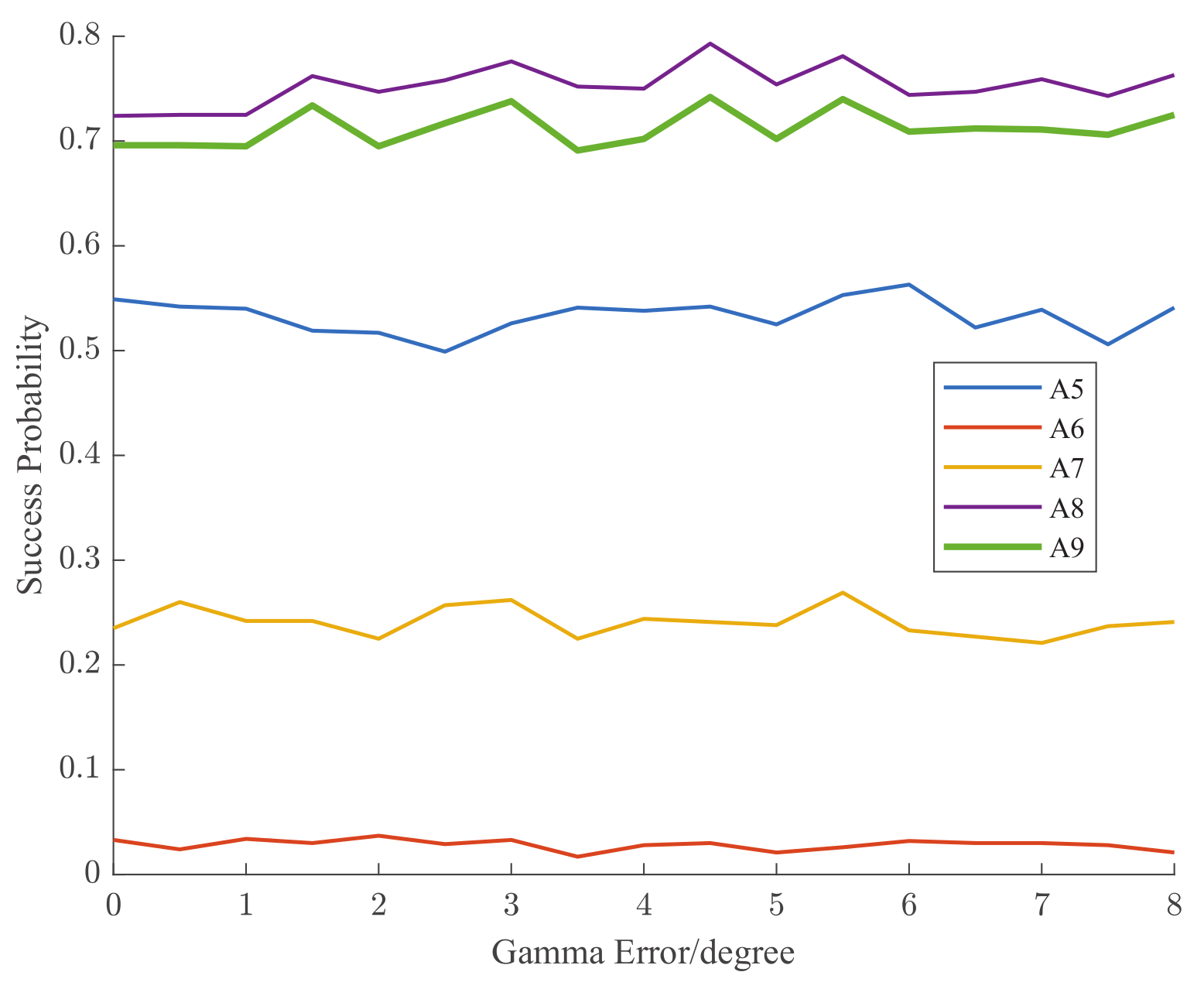
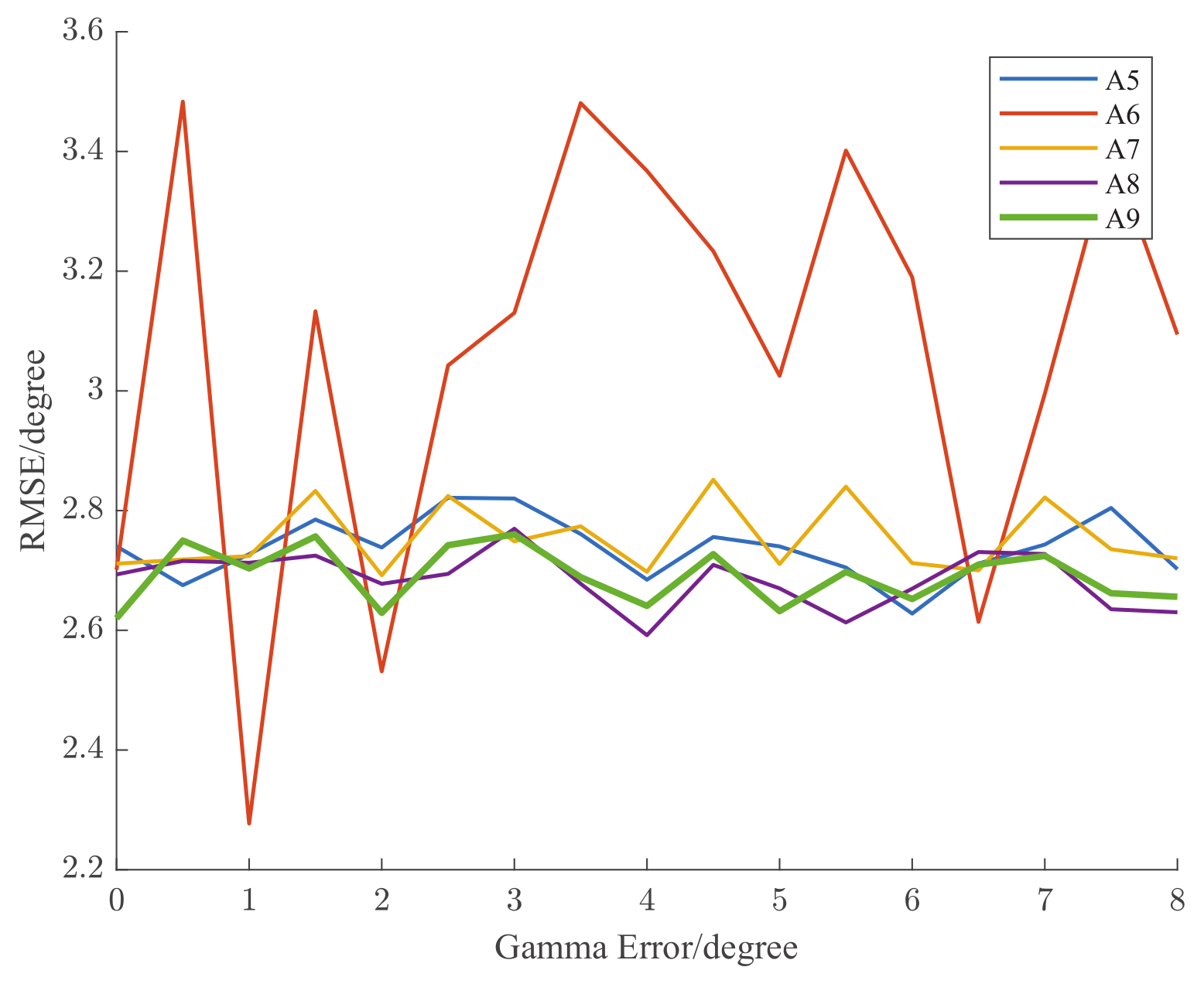
6.6. Effect of Polarization Error on Success Rate and RMSEs
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| DOA | direction of arrival |
| T-F | time-frequency |
| STFDs | spatial time-frequency distributions |
| SPTFDs | spatial polarimetric time-frequency distributions |
| MUSIC | multiple signal classification |
| ESPRIT | estimation of signal parameters using rotational invariance technique |
| TFDs | time-frequency distributions |
| SAR | synthetic aperture radar |
| PTF-MUSIC | polarimetric time-frequency MUSIC |
| TEM | transverse electromagnetic |
| WVD | Wigner–Ville distribution |
| JAD | joint antidiagonalization |
| TF-MUSIC | time-frequency MUSIC |
| SNR | signal-to-noise ratio |
| JSR | jamming-to-signal ratio |
| RMSEs | root-mean-square errors |
References
- Shie, Q.; Chen, D. Joint Time-Frequency Analysis. Methods and Applications; Prentince-Hall PTR: New York, NY, USA, 1996. [Google Scholar]
- Leon, C. Time-Frequency Analysis; Prentice Hall: Hoboken, NJ, USA, 1995. [Google Scholar]
- Nguyen, L.T.; Belouchrani, A.; Abed-Meraim, K.; Boashash, B. Separating more sources than sensors using time-frequency distributions. EURASIP J. Adv. Signal Process. 2005, 2005, 1–20. [Google Scholar]
- Zhang, Y.; Ma, W.; Amin, M.G. Subspace analysis of spatial time-frequency distribution matrices. IEEE Trans. Signal Process. 2001, 49, 747–759. [Google Scholar] [CrossRef]
- Belouchrani, A.; Amin, M.G.; Thirion-Moreau, N.; Zhang, Y.D. Source separation and localization using time-frequency distributions: An overview. IEEE Signal Process Mag. 2013, 30, 97–107. [Google Scholar] [CrossRef]
- Ma, N.; Goh, J.T. Ambiguity-function-based techniques to estimate DOA of broadband chirp signals. IEEE Trans. Signal Process. 2006, 54, 1826–1839. [Google Scholar]
- Lin, M.; Tian, Y.; Zhang, X.; Huang, Y. Parameter Estimation of Frequency-Hopping Signal in UCA Based on Deep Learning and Spatial Time–Frequency Distribution. IEEE Sens. J. 2023, 23, 7460–7474. [Google Scholar] [CrossRef]
- Belouchrani, A.; Abed-Meraim, K.; Cardoso, J.F.; Moulines, E. A blind source separation technique using second-order statistics. IEEE Trans. Signal Process. 1997, 45, 434–444. [Google Scholar] [CrossRef]
- Yang, Z.; Zhou, H.; Tian, Y.; Zhao, J.; Moulines, E. Improved CFAR Detection and Direction Finding on Time–Frequency Plane With High-Frequency Radar. IEEE Geosci. Remote. Sens. Lett. 2022, 19, 1–5. [Google Scholar]
- Schmidt, R. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef]
- Roy, R.; Kailath, T. ESPRIT-estimation of signal parameters via rotational invariance techniques. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 984–995. [Google Scholar] [CrossRef]
- Amin, M.G.; Zhang, Y. Direction finding based on spatial time-frequency distribution matrices. Digit. Signal Process. 2000, 10, 325–339. [Google Scholar] [CrossRef]
- Lee, W.C.Y.; Yeh, Y. Polarization diversity system for mobile radio. IEEE Trans. Commun. 1972, 20, 912–923. [Google Scholar] [CrossRef]
- Zhang, Y.; Amin, M.G. Array processing for nonstationary interference suppression in DS/SS communications using subspace projection techniques. IEEE Trans. Signal Process. 2001, 49, 3005–3014. [Google Scholar] [CrossRef]
- Liu, S.; Zhang, Y.D.; Shan, T.; Tao, R. Structure-aware Bayesian compressive sensing for frequency-hopping spectrum estimation with missing observations. IEEE Trans. Signal Process. 2018, 66, 2153–2166. [Google Scholar] [CrossRef]
- Wen, F.; Gui, G.; Gacanin, H.; Sari, H. Compressive Sampling Framework for 2D-DOA and Polarization Estimation in mmWave Polarized Massive MIMO Systems. IEEE Trans. Wirel. Commun. 2023, 22, 3071–3083. [Google Scholar] [CrossRef]
- McLaughlin, D.J.; Wu, Y.; Stevens, W.G.; Zhang, X.; Sowa, M.J.; Weijers, B. Fully polarimetric bistatic radar scattering behavior of forested hills. IEEE Trans. Antennas Propag. 2002, 50, 101–110. [Google Scholar] [CrossRef]
- Sadjadi, F. Improved target classification using optimum polarimetric SAR signatures. IEEE Trans. Aerosp. Electron. Syst. 2002, 38, 38–49. [Google Scholar] [CrossRef]
- Yueh, S.; Wilson, W.; Dinardo, S. Polarimetric radar remote sensing of ocean surface wind. IEEE Trans. Geosci. Remote Sens. 2002, 40, 793–800. [Google Scholar] [CrossRef]
- Garren, D.A.; Odom, A.C.; Osborn, M.K.; Goldstein, J.S.; Pillai, S.U.; Guerci, J.R. Full-polarization matched-illumination for target detection and identification. IEEE Trans. Aerosp. Electron. Syst. 2002, 38, 824–837. [Google Scholar] [CrossRef]
- Wong, K.; Zoltowski, M. Self-initiating MUSIC-based direction finding and polarization estimation in spatio-polarizational beamspace. IEEE Trans. Antennas Propag. 2000, 48, 1235–1245. [Google Scholar]
- Li, L. Root-MUSIC-based direction-finding and polarization estimation using diversely polarized possibly collocated antennas. IEEE Antennas Wirel. Propag. Lett. 2004, 3, 129–132. [Google Scholar]
- Yang, Y.; Jiang, G. Efficient DOA and Polarization Estimation for Dual-Polarization Synthetic Nested Arrays. IEEE Syst. J. 2022, 16, 6277–6288. [Google Scholar] [CrossRef]
- Stockwell, R.; Mansinha, L.; Lowe, R. Localization of the complex spectrum: The S transform. IEEE Trans. Signal Process. 1996, 44, 998–1001. [Google Scholar] [CrossRef]
- Ivanovic, V.; Dakovic, M.; Stankovic, L. Performance of quadratic time-frequency distributions as instantaneous frequency estimators. IEEE Trans. Signal Process. 2003, 51, 77–89. [Google Scholar] [CrossRef]
- Jeong, J.; Williams, W. Mechanism of the cross-terms in spectrograms. IEEE Trans. Signal Process. 1992, 40, 2608–2613. [Google Scholar] [CrossRef]
- Erdogan, A.Y.; Gulum, T.O.; Durak-Ata, L.; Yildirim, T.; Pace, P.E. FMCW signal detection and parameter extraction by cross Wigner–Hough transform. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 334–344. [Google Scholar] [CrossRef]
- Han, X.; Liu, M.; Zhang, S.; Zheng, R.; Lan, J. A Passive DOA Estimation Algorithm of Underwater Multipath Signals via Spatial Time-Frequency Distributions. IEEE Trans. Veh. Technol. 2021, 70, 3439–3455. [Google Scholar] [CrossRef]
- Liu, N.; Wang, J.; Yang, Y.; Li, Z.; Gao, J. WVDNet: Time-Frequency Analysis via Semi-Supervised Learning. IEEE Signal Process Lett. 2023, 30, 55–59. [Google Scholar] [CrossRef]
- Mu, W.; Amin, M.; Zhang, Y. Bilinear signal synthesis in array processing. IEEE Trans. Signal Process. 2003, 51, 90–100. [Google Scholar]
- Zuo, L.; Li, M.; Liu, Z.; Ma, L. A high-resolution time-frequency rate representation and the cross-term suppression. IEEE Trans. Signal Process. 2016, 64, 2463–2474. [Google Scholar] [CrossRef]
- Obeidat, B.; Zhang, Y.; Amin, M. Polarimetric time-frequency ESPRIT. In Proceedings of the Thrity-Seventh Asilomar Conference on Signals, Systems & Computers, Pacific Grove, CA, USA, 9–12 November 2003; pp. 1178–1182. [Google Scholar]
- Belouchrani, A.; Amin, M. Blind source separation based on time-frequency signal representations. IEEE Trans. Signal Process. 1998, 46, 2888–2897. [Google Scholar] [CrossRef]
- Zhang, Y.; Mu, W.; Amin, M. Time–frequency maximum likelihood methods for direction finding. J. Franklin Inst. 2000, 337, 483–497. [Google Scholar] [CrossRef]
- Belouchrani, A.; Amin, M. Time-frequency MUSIC. IEEE Signal Process Lett. 1999, 6, 109–110. [Google Scholar] [CrossRef]

















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shao, S.; Liu, A.; Wang, X.; Yu, C. Polarization Direction of Arrival Estimation Using Dual Algorithms Based on Time-Frequency Cross Terms. Electronics 2023, 12, 3575. https://doi.org/10.3390/electronics12173575
Shao S, Liu A, Wang X, Yu C. Polarization Direction of Arrival Estimation Using Dual Algorithms Based on Time-Frequency Cross Terms. Electronics. 2023; 12(17):3575. https://doi.org/10.3390/electronics12173575
Chicago/Turabian StyleShao, Shuai, Aijun Liu, Xiuhong Wang, and Changjun Yu. 2023. "Polarization Direction of Arrival Estimation Using Dual Algorithms Based on Time-Frequency Cross Terms" Electronics 12, no. 17: 3575. https://doi.org/10.3390/electronics12173575