
Deep Learning-Enabled Improved Direction-of-Arrival Estimation Technique
 , , and
, , and
Abstract
:1. Introduction
- First, the structure of the model and simulation for training the DL approach is defined.
- Then, the implemented deep learning methods are described, along with key design decisions unique to them.
- Finally, the performance of the DL-based system is compared with the conventional MUSIC algorithm using quantitative evaluation criteria. As a result, the proposed approach can resolve signals and provide accurate DOA estimations that the MUSIC algorithm cannot.
2. Data Model and Implementation
2.1. MUSIC Algorithm
2.2. Simulation Framework
- A uniform rectangular array (URA) consisting of isotropic antenna elements, the number of which is adjustable (array size selection is based on computational resources available). To avoid the appearance of grating lobes, the inter-element spacing is considered smaller than /2, where is the wavelength.
- An array signal generated by collecting the plane wave impinging the antenna array, the azimuth and elevation DOAs (i.e., pairs of ), and the sampling frequency.
- Noise data defined according to the size of the antenna array with the appropriate power. Although a central frequency is selected in the simulator, the investigation is frequency agnostic.
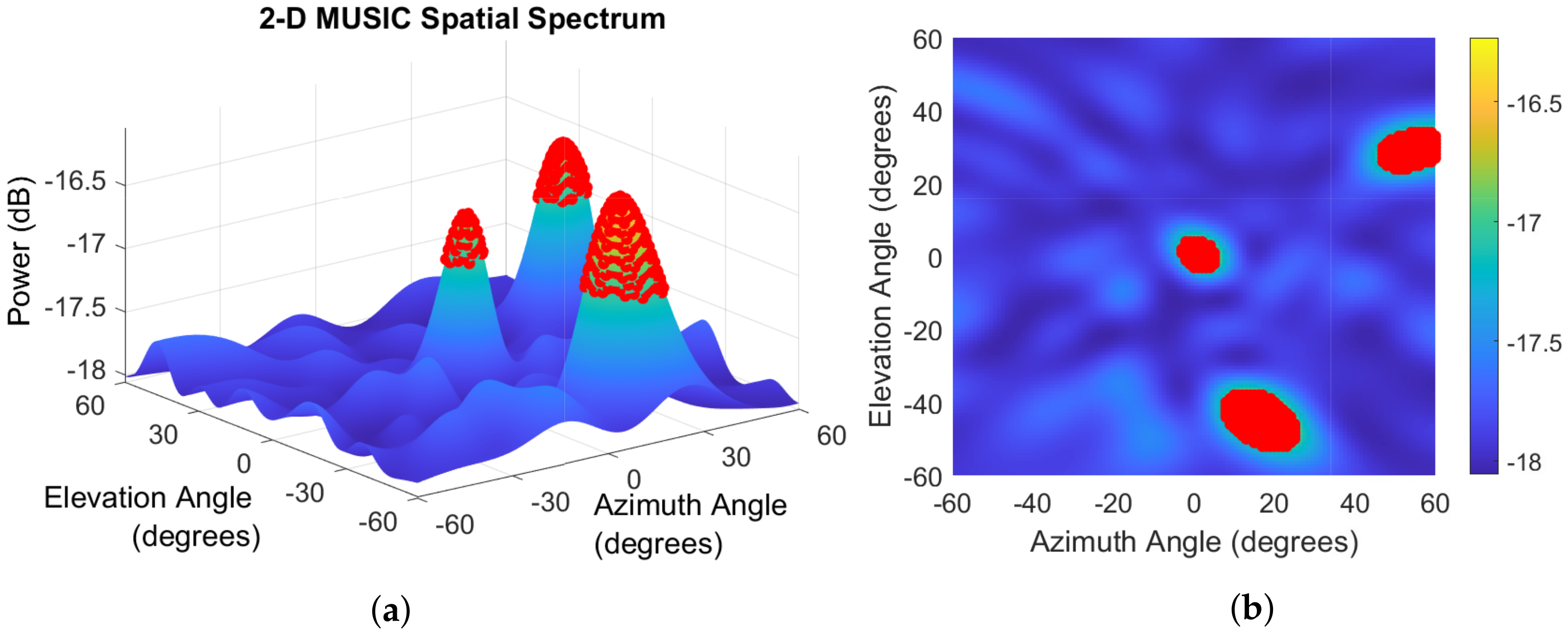
- A two-dimensional (2D) MUSIC algorithm estimator which will estimate the DOA in the range of −90° to 90° in both elevation and azimuth angles.
- A peak finder method to identify the peaks corresponding to the estimated DOAs in the spectrum plot generated from the 2D MUSIC estimator.
2.3. DL Framework
2.4. DL Approaches Description
2.5. Implementation
- Specify multiple noise power values. The models will need to be tested against signals in a spectrum of different noise conditions.
- For each noise power value, generate a signal for every angle 1° apart in the range of −60° to 60° in both azimuth and elevation angles.
- For the covariance matrix generated, take both the magnitude and phase values separately (as complex numbers). Absolute value and angle value are taken for magnitude and phase, respectively.
- Perform the conventional MUSIC algorithm estimation for each signal for later comparison. The MSE and mean absolute error (MAE) between estimates and true angles will be compared to the MSE and MAE achieved from the best neural networks. This will be the way to evaluate the success of the approach.
- Insert magnitude, phase and true angles into separate comma-separated value files inside the true angle file and save the MUSIC algorithm’s estimated values.
2.6. Testing Keras DL
- For data preprocessing methods (e.g., dimensionality reduction and splitting training and test sets), provide mock data to the methods and make assertions on the properties of the returned data. For example, assert that the correct shape and size of the data are returned, or that the correct split sizes on the data are returned.
- For neural network generation methods (e.g., generating MLP, 1D-CNN, combining models, etc.) test that parameterised creation of networks works as expected. Create a standard neural network from methods and then create an equivalent model using the Keras functional API in the test. Finally, assert that the output shapes of the layers and the number of layers are equal.
- For testing metrics methods (e.g., generating MUSIC metrics) test that metric values are returned as expected. For example, mock output data and calculate MSE and MAE, and calculate the number of out-of-range values (NaN). Finally, assert that these values are the same as those returned from the metrics methods.
3. Simulation Results and System Evaluation
- Data generated from a URA. This array generates raw data that can contain complex patterns and information related to signal sources, interference, and spatial relationships.
- The same URA data, this time with principal component analysis (PCA) dimension reduction [26] has been applied to it. PCA works by transforming the original dataset into a new set of orthogonal variables called principal components. These components capture the most significant variance present in the data. By applying PCA to the URA data, one aims to reduce the complexity of the dataset while retaining the most critical information. PCA can potentially enhance the SNR, suppress noise, and highlight important patterns, which may lead to more accurate and robust analysis outcomes. However, there is a trade-off between the reduction in dimensionality and the retention of information. It is important to carefully examine how much variance is retained after dimension reduction and whether the reduction in complexity leads to a significant loss of critical information.
- Data generated from an URA with applying PCA. Expanding upon the exploration of URAs and PCA, we now consider a larger array configuration. The data generated from an URA represents a more complex and richer dataset compared to the previous URA scenario, potentially capturing a more diverse range of signal sources and spatial patterns. The goal remains consistent: to determine whether the reduction in dimensionality through PCA enhances or diminishes the analytical outcomes, and to strike a balance between complexity reduction and information preservation.
- The combination approach provides better accuracy than any approach against only magnitude or phase.
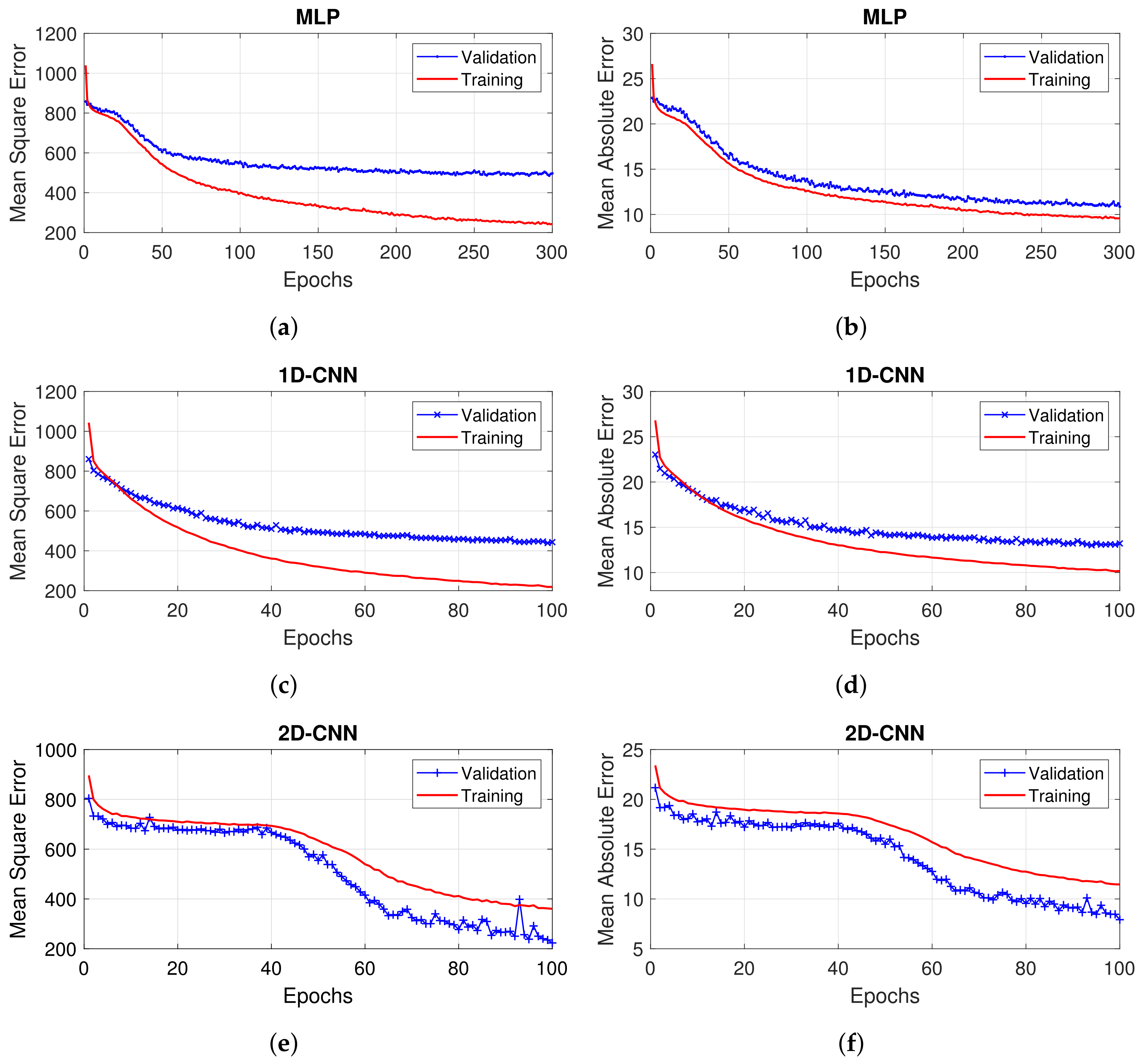
- The MLP approach works better against dimensionally reduced data. This is expected as it allows for a simpler neural network design with fewer connections which also helps to reduce overfitting.
- The 1D-CNN approach works better against non-reduced data. This makes sense as a CNN works by extracting features that may be reduced or distorted when PCA is performed.
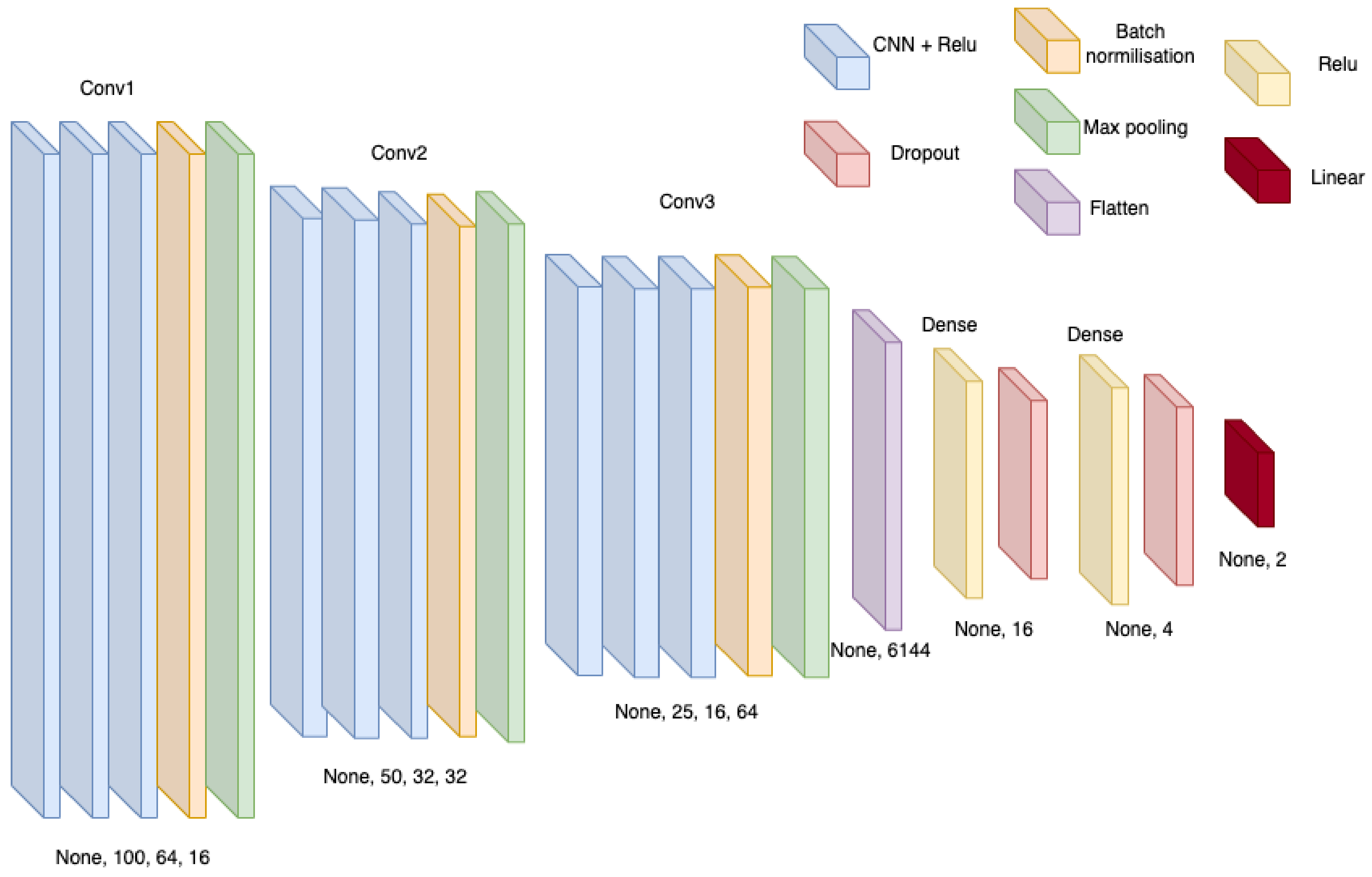
- The best results are generated from the 2D-CNN approach. This is also expected as this approach allows for the structure of the originally generated data (two dimensions) to be maintained and thus features can be more accurately defined. However, this approach can only be achieved against the non-dimensionally reduced data in our current hardware.
4. Conclusions and Future Works
- Based on the experimental data, the results will be further validated.
- The DL approach has currently only been tested on a maximum antenna size of antennas when a real-world computation for a massive MIMO system would tend to be . This was due to the limited hardware capabilities available for this work. Moreover, analysis around computational time needs further study.
- The DL approach currently only makes predictions for single signal data. However, the MUSIC algorithm can resolve high numbers of signals with high accuracy. It would therefore be necessary that the DL models be adapted to allow for multiple signal classifications.
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Saleem, A.; Cui, H.; He, Y.; Boag, A. Channel propagation characteristics for massive multiple-input/multiple-output systems in a tunnel environment [measurements corner]. IEEE Antennas Propag. Mag. 2022, 64, 126–142. [Google Scholar] [CrossRef]
- Catreux, S.; Driessen, P.F.; Greenstein, L.J. Data throughputs using multiple-input multiple-output (MIMO) techniques in a noise-limited cellular environment. IEEE Trans. Wirel. Commun. 2002, 1, 226–235. [Google Scholar] [CrossRef]
- Chen, J.; Li, S.; Tao, J.; Fu, S.; Sobelman, G.E. Wireless beam modulation: An energy-and spectrum-efficient communication technology for future massive IoT systems. IEEE Wirel. Commun. 2020, 27, 60–66. [Google Scholar] [CrossRef]
- Imoize, A.L.; Obakhena, H.I.; Anyasi, F.I.; Sur, S.N. A Review of Energy Efficiency and Power Control Schemes in Ultra-Dense Cell-Free Massive MIMO Systems for Sustainable 6G Wireless Communication. Sustainability 2022, 14, 11100. [Google Scholar] [CrossRef]
- Byreddy, A.R.; Logashanmugam, E. Energy and spectral efficiency improvement using improved shark smell-coyote optimization for massive MIMO system. Int. J. Commun. Syst. 2023, 36, e5381. [Google Scholar] [CrossRef]
- Liu, Y.; Dong, N.; Zhang, X.; Zhao, X.; Zhang, Y.; Qiu, T. DOA Estimation for Massive MIMO Systems with Unknown Mutual Coupling Based on Block Sparse Bayesian Learning. Sensors 2022, 22, 8634. [Google Scholar] [CrossRef] [PubMed]
- Aquino, S.; Vairavel, G. A Review of Direction of Arrival Estimation Techniques in Massive MIMO 5G Wireless Communication Systems. In Proceedings of the Fourth International Conference on Communication, Computing and Electronics Systems: ICCCES 2022, Coimbatore, India, 15–16 September 2022; Springer: Berlin/Heidelberg, Germany, 2023; pp. 15–34. [Google Scholar]
- Gu, J.F.; Zhu, W.P.; Swamy, M. Joint 2-D DOA estimation via sparse L-shaped array. IEEE Trans. Signal Process. 2015, 63, 1171–1182. [Google Scholar] [CrossRef]
- Guo, M.; Chen, T.; Wang, B. An improved DOA estimation approach using coarray interpolation and matrix denoising. Sensors 2017, 17, 1140. [Google Scholar] [CrossRef] [PubMed]
- Shi, Z.; He, Q.; Liu, Y. Accelerating parallel Jacobi method for matrix eigenvalue computation in DOA estimation algorithm. IEEE Trans. Veh. Technol. 2020, 69, 6275–6285. [Google Scholar] [CrossRef]
- Ge, S.; Li, K.; Rum, S.N.B.M. Deep learning approach in DOA estimation: A systematic literature review. Mob. Inf. Syst. 2021, 2021, 6392875. [Google Scholar] [CrossRef]
- Molaei, A.M.; Del Hougne, P.; Fusco, V.; Yurduseven, O. Numerical-Analytical Study of Performance of Mixed-Order Statistics Algorithm for Joint Estimation of DOA, Range and Backscatter Coefficient in a MIMO Structure. In Proceedings of the 2022 23rd International Radar Symposium (IRS), Gdansk, Poland, 12–14 September 2022; IEEE: New York, NY, USA, 2022; pp. 396–401. [Google Scholar]
- Shaikh, S.A.; Tonello, A.M. DoA estimation in EM lens assisted massive antenna system using subsets based antenna selection and high resolution algorithms. Radioengineering 2018, 27, 159–169. [Google Scholar] [CrossRef]
- Yadav, S.K.; George, N.V. Coarray MUSIC-group delay: High-resolution source localization using non-uniform arrays. IEEE Trans. Veh. Technol. 2021, 70, 9597–9601. [Google Scholar] [CrossRef]
- Merkofer, J.P.; Revach, G.; Shlezinger, N.; Routtenberg, T.; van Sloun, R.J. DA-MUSIC: Data-Driven DoA Estimation via Deep Augmented MUSIC Algorithm. In Proceedings of the ICASSP 2022—2022 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Toronto, ON, Canada, 6–11 June 2021. [Google Scholar]
- Jaafer, Z.; Goli, S.; Elameer, A.S. Best performance analysis of doa estimation algorithms. In Proceedings of the 2018 1st Annual International Conference on Information and Sciences (AiCIS), Dhaka, Bangladesh, 19–21 December 2020; IEEE: New York, NY, USA, 2018; pp. 235–239. [Google Scholar]
- Huang, Q.; Lu, N. Optimized Real-Time MUSIC Algorithm With CPU-GPU Architecture. IEEE Access 2021, 9, 54067–54077. [Google Scholar] [CrossRef]
- Moein, M.M.; Saradar, A.; Rahmati, K.; Mousavinejad, S.H.G.; Bristow, J.; Aramali, V.; Karakouzian, M. Predictive models for concrete properties using machine learning and deep learning approaches: A review. J. Build. Eng. 2022, 63, 105444. [Google Scholar] [CrossRef]
- Ma, R. Wideband, Direction of Arrival Estimation Using Small-Aperture Antenna Arrays; The University of Wisconsin-Madison: Madison, WI, USA, 2020. [Google Scholar]
- Xu, K.; Quan, Y.; Bie, B.; Xing, M.; Nie, W.; Hanyu, E. Fast direction of arrival estimation for uniform circular arrays with a virtual signal subspace. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 1731–1741. [Google Scholar] [CrossRef]
- Moolayil, J.; Moolayil, J. An introduction to deep learning and keras. In Learn Keras for Deep Neural Networks: A Fast-Track Approach to Modern Deep Learning with Python; Apress: Berkeley, CA, USA, 2019; pp. 1–16. [Google Scholar]
- Zhang, Z. Improved adam optimizer for deep neural networks. In Proceedings of the 2018 IEEE/ACM 26th International Symposium on Quality of Service (IWQoS), Banff, AB, Canada, 4–6 June 2018; IEEE: New York, NY, USA, 2018; pp. 1–2. [Google Scholar]
- Lecun, Y.; Bottou, L.; Bengio, Y.; Haffner, P. Gradient-based learning applied to document recognition. Proc. IEEE 1998, 86, 2278–2324. [Google Scholar] [CrossRef]
- About Keras. Available online: https://keras.io/about/ (accessed on 1 July 2023).
- Why Choose Keras? Available online: https://keras.io/why_keras/ (accessed on 1 July 2023).
- Hasan, B.M.S.; Abdulazeez, A.M. A review of principal component analysis algorithm for dimensionality reduction. J. Soft Comput. Data Min. 2021, 2, 20–30. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
| Approach | Dataset | MSE | MAE |
|---|---|---|---|
| MLP-based | URA with PCA | 497.03 | 10.86 |
| 1D-CNN-based | URA with PCA | 443.59 | 13.21 |
| MUSIC | URA with PCA | 1375.57 | 21.15 |
| 2D-CNN-based | URA | 223.35 | 7.92 |
| MUSIC | URA | 75.58 | 5.15 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jenkinson, G.; Abbasi, M.A.B.; Molaei, A.M.; Yurduseven, O.; Fusco, V. Deep Learning-Enabled Improved Direction-of-Arrival Estimation Technique. Electronics 2023, 12, 3505. https://doi.org/10.3390/electronics12163505
Jenkinson G, Abbasi MAB, Molaei AM, Yurduseven O, Fusco V. Deep Learning-Enabled Improved Direction-of-Arrival Estimation Technique. Electronics. 2023; 12(16):3505. https://doi.org/10.3390/electronics12163505
Chicago/Turabian StyleJenkinson, George, Muhammad Ali Babar Abbasi, Amir Masoud Molaei, Okan Yurduseven, and Vincent Fusco. 2023. "Deep Learning-Enabled Improved Direction-of-Arrival Estimation Technique" Electronics 12, no. 16: 3505. https://doi.org/10.3390/electronics12163505