1. Introduction
Spatial crowdsourcing (SC) [
1,
2] has been widely applied in our daily life, such as crowdsourcing taxis (Uber, DiDi, Didachuxing, etc.) crowdsourcing logistics, and crowdsourced take-out delivery. In these applications, task assignment is an essential requirement for SC. As shown in
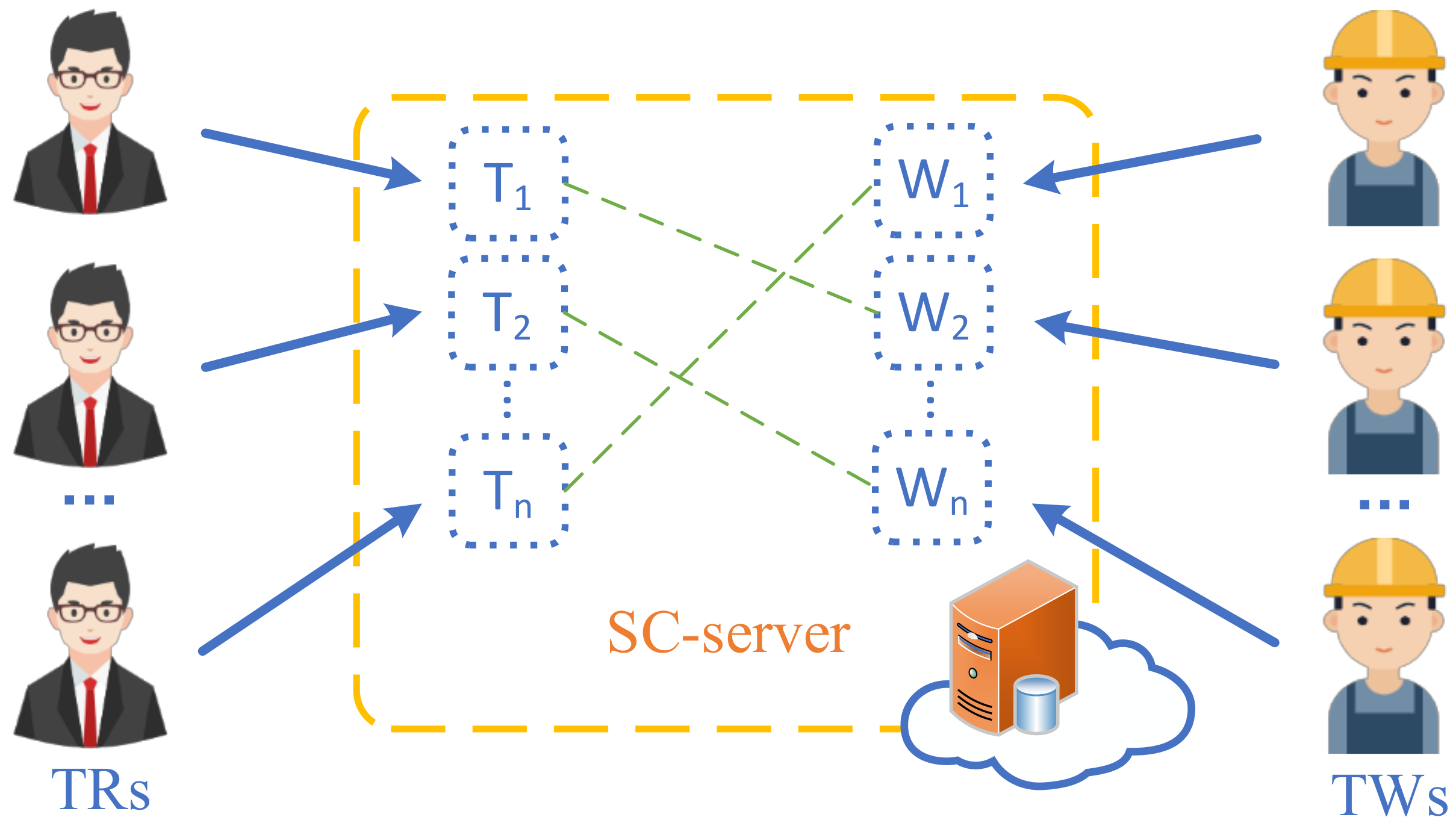
Figure 1, the task assignment is to tackle how to assign a crowdsourcing task to appropriate workers. For example, an appropriate worker has a minimum travel distance. The task publishers are called task requesters (TRs), and the task completers are called task workers (TWs).
Privacy concerns are widespread in various scenarios in cloud environments, such as neural network training and prediction [
3] and support vector machine training in the cloud [
4]. It is also a key barrier faced by task assignment of SC. Task assignment of SC always needs to utilize the location both of TWs and task to perform task assignment. However, in terms of TWs and TRs, location data are sensitive information, which involves location privacy [
5]. Thus, TWs may refuse to take part in the crowdsourcing task due to privacy concerns. If all TWs do not participate in any crowdsourcing task, the SC paradigm fails to tackle any task by the capability of crowds. On the other hand, in terms of an SC platform, it suffers from high penalties due to disclosing collected TWs’ locations and task locations. For example, DiDi is fined
$1.28 billion, and Uber is fined
$148 million.
Privacy-preserving task assignment simultaneously resolves the task assignment and privacy concerns of SC. Privacy-preserving task assignment is to assign the crowdsourcing task to TWs without compromising any TW or task privacy. Privacy-preserving task assignment has become a research hotpot, and a number of solutions have been proposed. In existing solutions, encryption-based and differential privacy (DP)-based are common methods to protect the privacy of TWs’ locations or task locations. DP-based solutions have an advantage over efficiency but are weak in accuracy. In contrast, encryption-based solutions can perform accurate computations but face high computation burdens. Although there are abundant solutions to enable privacy-preserving task assignment, hardly any existing scheme supports the privacy-preserving hitchhiking paradigm, in which each worker has a specific trajectory and is allowed to perform a task on her way without scarifying location privacy of any worker and task. Privacy-preserving hitchhiking task assignment faces with following technical challenges.
The first challenge is how to compute the travel distance without knowing any TW location and task location. The travel distance is the distance between TW’s location and a task location. The travel distance is usually measured by Euclidean distance or Manhattan distance. However, whether it is Euclidean distance or Manhattan distance, computing them is not straightforward when the worker’s location and the task location are unknown. Technically, it requires computing the travel distance over encrypted or obscured locations. The second challenge is how to estimate reachability without compromising privacy. An SC task is spatiotemporal dependent, thus, and it requires not only computing the travel distance but also estimating whether a TW can reach the task location or not under the time constraint. Intuitively, if all TWs’ locations and task locations as well as their temporary information are known, it is easy to estimate whether a TW can reach the location on schedule. However, to protect privacy, a privacy-preserving task assignment solution fails to learn any TW and task spatiotemporal sensitive information. The third challenge is how to search for an optimal worker under privacy protection. The task assignment is usually regarded as an optimization problem, such as searching for the minimum travel distance under multiple constraints. The challenge for privacy-preserving task assignment is to resolve the optimization problem under all data being encrypted or obscured.
To tackle the above challenges, in this paper, we propose a privacy-preserving hitchhiking task assignment solution for SC, called PKGS (PKGS comes from a Privacy-preserving hitchhiKing task assiGnment solution for spatial crowdSourcing). Specifically, we first formulate the privacy-preserving hitchhiking task assignment as a decision problem of the relationship between dot and line within privacy protection. We then adopt the Paillier cryptosystem that enables computation over encrypted data to encrypt the worker and task spatiotemporal information and protect their privacy. To enable the Paillier cryptosystem supporting operations of privacy-preserving task assignment, including computation of traveling distance, accessibility estimation, and optimization under constraints, we carefully design a privacy-preserving travel distance calculation protocol and a privacy-preserving comparison protocol. Our contributions are three-fold as follows.
- (1)
We formulate a privacy-preserving hitchhiking task assignment. To the best of our knowledge, this paper formulates a privacy-preserving hitchhiking task assignment as a decision problem of the relationship between dot and line under privacy protection for the first time.
- (2)
We present two privacy-preserving computation protocols. To enable privacy protection and computation over encrypted data, we present a privacy-preserving travel distance calculation protocol to measure the Manhattan distance between a TW and a task. We also present a privacy-preserving comparison protocol to estimate the accessibility and search for the TW holding a minimum travel distance.
- (3)
We propose a privacy-preserving hitchhiking task assignment solution and evaluate its effectiveness and efficiency. Based on the proposed two privacy-preserving computation protocols, we construct a privacy-preserving hitchhiking task assignment solution, which can search for the optimal TW with a minimum travel distance within several seconds.
The rest of this paper is organized as follows. We introduce the related work in
Section 2. In
Section 3, we describe the system model, security model, Paillier cryptosystem, and problem formulation. In
Section 4, we introduced Scheme PKGS in detail, including how to select potential TWs and how to select optimal TW. In
Section 5, we analyze the security of PKGS.
Section 6 reports and evaluates the experimental results. Finally, we draw a conclusion in
Section 7.
2. Related Work
In recent research, task assignment protecting user privacy can be roughly divided into two types. One is to protect user privacy by processing user-uploaded information or query feedback information. The other is to achieve the purpose by encrypting this information. The first type mainly builds a cloaking region by processing information data. Intuitively, anonymous and perturbation techniques can do this. Based on k-anonymity [
6] and l-diversity [
7], a lot of anonymous task assignments have been proposed [
8,
9,
10,
11]. In [
8], Kazemi et al. proposed the PiRi scheme, in which multiple users co-create anonymous zones and send requests to the SC server through anonymous zones, thus achieving privacy protection. Users in the anonymous zone share the results of requests to the SC server. Vu et al. [
9] partition at least k adjacent users into a group with locality-sensitive hashing (LSH) that maintains both localization and k-anonymity. They design an algorithm for kNN querying based on this partition. Pournajaf et al. [
10] study a spatial task assignment method when workers utilize spatial cloaking to obfuscate their locations, which assigns tasks by managing location regions with resource constraints. Based on Pournajaf’s work, Hu et al. [
11] consider the extent to which a worker is willing to move so that the worker’s position in a task assignment is an area of activity. Like the anonymous technique, perturbation techniques can protect users’ privacy by modifying values, such as differential privacy or perturbation of geographical position [
12,
13,
14,
15]. To et al. [
12] utilize a trusted third party to preprocess data and then utilize differential privacy protection to protect the worker’s location. After that, they tackle the moving TWs challenge by continuously sending privacy-preserving location information and reducing the noise generated in this way by Kalman filter-based post-processing technique [
15]. Based on [
12], Gong et al. [
13] introduced reputation parameters for quality assessment. In a similar framework, Zhang et al. [
14] use contour plots to characterize the distribution of workers and thus have less noise generation than others.
Cryptographic systems to encrypt data are the other way to protect the user’s privacy [
16,
17,
18,
19,
20,
21]. Without further consideration of efficiency, the method is strongly theoretically supported for security. These schemes for encrypting data require the construction of protocols that conform to that encryption method to accomplish the assignment of tasks. Zhao et al. [
16] propose the iTAM scheme that achieves multiple constrained exact matching of TR and TW by Paillier. However, the full ciphertext comparison leads to the need to compare all the candidates. Although Shu et al. [
17] achieve bidirectional privacy-preserving task assignment through proxy re-encryption, their proposed solution requires additional servers such as proxy servers or fog nodes. Then they proposed pMatch [
18], that is, a mechanism based on Shamir secret sharing that solves the problem of needing a proxy in privacy-preserving task assignment. Wang et al. [
19] provided a personalized privacy-preserving task assignment mechanism PWSM that uses fuzzy location information to assign tasks to the maximum probability worker closest to the task. In [
20], Ni et al. proposed the SPOON scheme, which recruits workers based on user location and protects privacy through proxy re-encryption and BBS+ signature. Liu et al. [
21] proposed a range search retrieval method that can perform ciphertext retrieval in a small area, thus improving efficiency, but did not propose a corresponding range determination and scaling method. The encryption scheme has the advantage of accurate retrieval, but its retrieval matching process is time-consuming. Workers need to wait for a long matching time after completing a task before they can be assigned the next task. Therefore, we propose a hitchhiking scheme that enables workers to complete tasks within an existing trip, thus increasing their motivation.
3. Problem Formulation and Preliminaries
3.1. System Model
As depicted in
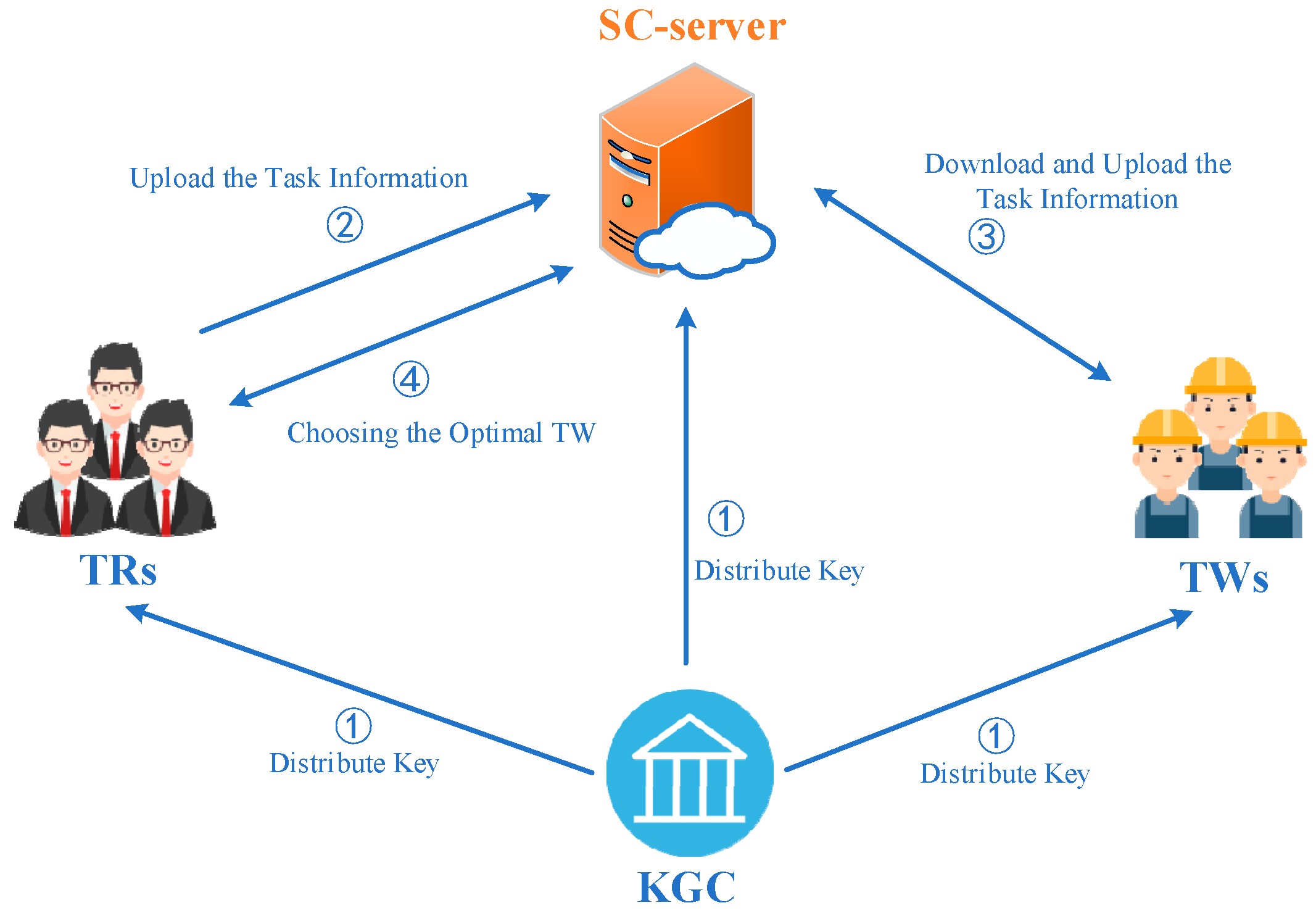
Figure 2, our system model consists of Task Requesters (TRs), Task Workers (TWs), Key Generation Center (KGC), and CS server. The CS server is an online platform provided by a service provider (SP) where it matches the TRs and TWs according to their requirement. In other words, it receives task requests from TRs as well as TWs and matches them online. KGC is a trusted organization for secret key generation and distribution. The TRs are the users of SP who want to find a suitable worker to help them complete a task within space-time by the platform. Similarly, the TWs are the other kind of users of SP who want to find a job satisfying their requirements. In our system, the whole task assignment process is divided into four main steps as follows.
In ①, KGC generates public and private keys and manages them for TRs, TWs, and the SC server.
In ②, TRs use public keys to encrypt key task information and upload task descriptions and encrypted task information to the SC server.
In ③, TWs download the information about the task they want to perform and upload their work information to the SC server with the same public key encryption.
In ④, the SC server cooperates with the TR issued the task to complete the selection of the optimal worker without revealing private information.
3.2. Security Model
In SC, due to the strongly spatiotemporal properties of tasks, the task request of both TRs and TWs includes much personal sensitive information. This information reveals the current approximate location and needs of a TR or TW to a certain extent, and it has also become the target that the adversary wants to obtain. We assume a strong adversary in our model, who has the following capabilities.
- (1)
can disguise as a legal TR or TW and communicate with the SC server to obtain information.
- (2)
can eavesdrop on the communication channel between TRs or TWs and CS server to capture communication information.
- (3)
can compromise the SC server to obtain some information of an unselected TW stored on it.
As
Figure 2 shows, the potential threats mainly come from TRs, TWs, and the SC server. Here, we assume that the SC server is semi-honest. In other words, the SC server is honest-but-curious, which follows the protocol but wants to snoop on the user’s privacy. This assumption is reasonable because a formal service provider needs to register when releasing its products, and it will provide services under the pre-agreed agreement. However, it also wants to optimize and promote its products by collecting user information, but the collected user information is harmful to users. So, we need to face security threats from these aspects of them, not just adversaries but curious users or the CS server. We should avoid the three of them casually viewing the plaintext of task request information of TRs and TWs. This can prevent an adversary from pretending to be a legal user to obtain the task information of TRs or TWs by his task requirement.
3.3. Paillier Cryptosystem
As a homomorphic public key cryptosystem, the Paillier cryptosystem [
22] is widely used for secure multiparty computer protocols.
Key generation: and are large prime numbers independently, set and , and select random integer , and then compute , where the function is defined as . The public key is and the private key is .
Encryption: Given a message to be encrypted with the public key , , where is a selected random integer .
Decryption: Given the ciphertext to be decrypted with the private key , .
Let , its homomorphic properties are described below.
- (1)
Additive homomorphism:
- (2)
Scalar-multiplicative homomorphism:
3.4. Problem Formulation
In PKGS, we try to help TWs with an existing itinerary to match a suitable task. A TW has her/his departure time, departure location, and destination location. A TR publishes a task that requires someone to complete the specified task at the agreed place at the specified time. To transform the real problem into a mathematical problem, we formulate Task, TW, Travel Distance, and Task Assignment. For the convenience of description, we use instead of specific coordinates .
Definition 1 (Task). A Task denoted byrequires a TW to travel to the physical locationto perform the task. The task start time is, and the time required to complete the task is,is a task description without involving privacy of the task.
Definition 2 (TW). A TW denoted bystarts from pointto point, her/his departure time is, the cutoff time to reachis, and the travel speed is v.
Definition 3 (Travel Distance). Travel distance is Manhattan Distance (MD) denoted bythat is a new metric in which the distance between two points is the sum of the absolute differences of their cartesian coordinates and is also known as city block distance or taxicab geometry. Assuming there are two pointsand, their Manhattan distance is calculated as follows.
Compared with Euclidean distance, Manhattan distance is more suitable for calculating the distance between two points in the city. As we know, it is not possible to get from point A to point B in a city directly through a building, which is why it is called city block distance or taxicab geometry.
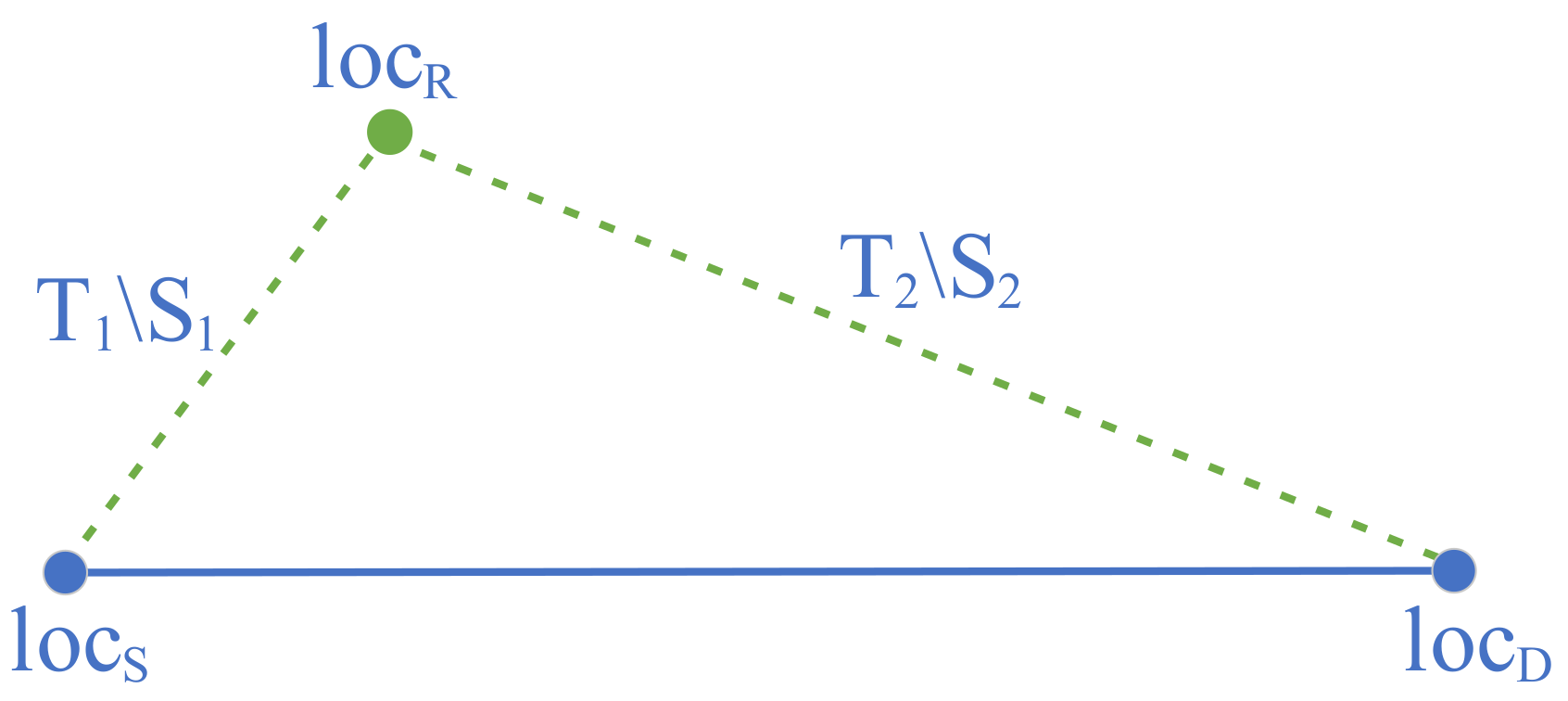
Definition 4 (Task Assignment). Task assignment is a set of conditions matching TR and TW. As
Figure 3 shows, the TW plans to go fromto. The task location is. Task assignment requires the following conditions to be met. For the TW, she/he needs to reachbefore. For the TR, the task needs to start at moment. The time taken by the TW to travel fromtoand fromtois T1 and T2, respectively. So, the task assignment needs to fulfill the following conditions. To make the matching condition satisfy the homomorphic cryptosystem, we do a little trick with it. We transform a comparison of time into a comparison of distance. Assume there is a TR’s task denoted by
and a TW denoted by
. If the following constraints are met
the TW can perform the TR’s task. In this set of equations,
,
,
,
.
Remark 1. The distance of the TW from the starting point to the task point is denoted as S1. The distance from the task point to the end point of the TW is denoted as S2. The farthest moving distance of the TW under the premise of completing the task is recorded as S. This is the product of the time the TW can spend moving and his or her speed. Before the task starts, the maximum distance that the TW can move is recorded as S′. Its rationale is like that of S. S1 + S2 ≤ S means that the TW can go to the mission point to complete the mission without delaying his original journey. S1 ≤ S′ means that the TW can reach the task point before the task needs to be started.
Task allocation needs to consider not only whether the task will be completed on time, but also who is the optimal TW. The set of candidate TWs is denoted by
, and the set of
S1 of each TW is denoted by
. A TW is an optimal worker if he satisfies the following conditions.
As we know, S1 is the distance of the TW from the start point to the task point. Equation (6) means that WS1 is the nearest worker to the task point. If the TW is closer, the probability is higher that the TW will arrive at the task point as early as possible to start working.
4. Design of PKGS
4.1. Overview of PKGS
We have a preliminary understanding of PKGS through the previous system model, and now we will introduce its scheme process in detail. In
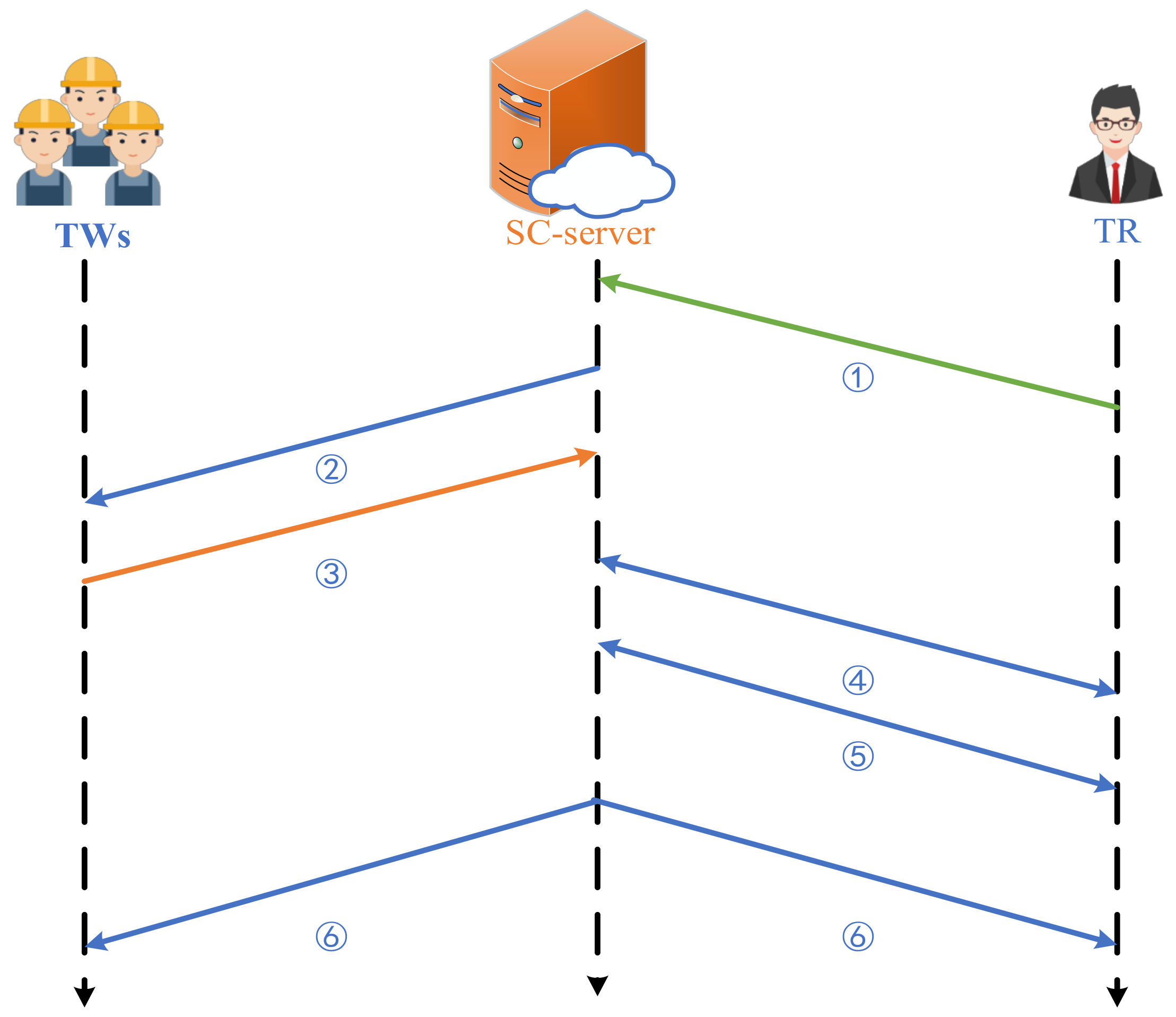
Figure 4, we illustrate the process of PKGS with an example where a TR matches TWs for clarity. This situation can be seen as a case where, among the many TRs tasks, this group of TWs chose this task at the same time.
In ①, a TR sends a request to the SC server to find a suitable TW to complete her/his CS task. As mentioned in
Section 3.4, the TR’s task is denoted by
. To make it easier for TWs to choose, he uploads the encrypted location information
locR and the time required to complete the task
Ttask, as well as the unencrypted task start time
TRstart and task description
TD to the SC server.
In ②, TWs select a task on the SC server and download the task information from it.
In ③, each TW adds their encrypted information to the downloaded encrypted task information and sends the encrypted information back to the SC server.
In ④, the SC server figures out candidate TWs who met the constraints with the help of TR.
In ⑤, the SC server finds the optimal TW from the candidate TWs with TR’s assistance.
In ⑥, finally, the SC server establishes a connection between them.
Note that according to the descriptions in
Section 3.4 and
Section 4.1, there are mainly two difficult problems to be solved. The travel distance is calculated from the encrypted task information and the encrypted travel distance is compared. Given this, we will focus on these two types of challenges and address two solutions detailed in the following two subsections.
4.2. Privacy-Preserving Comparison Protocol
Both absolute value symbol removal and constraint judgment require a comparison operation on the ciphertext. In this subsection, we propose a PC (privacy-preserving comparison) protocol to solve the comparison of encrypted information.
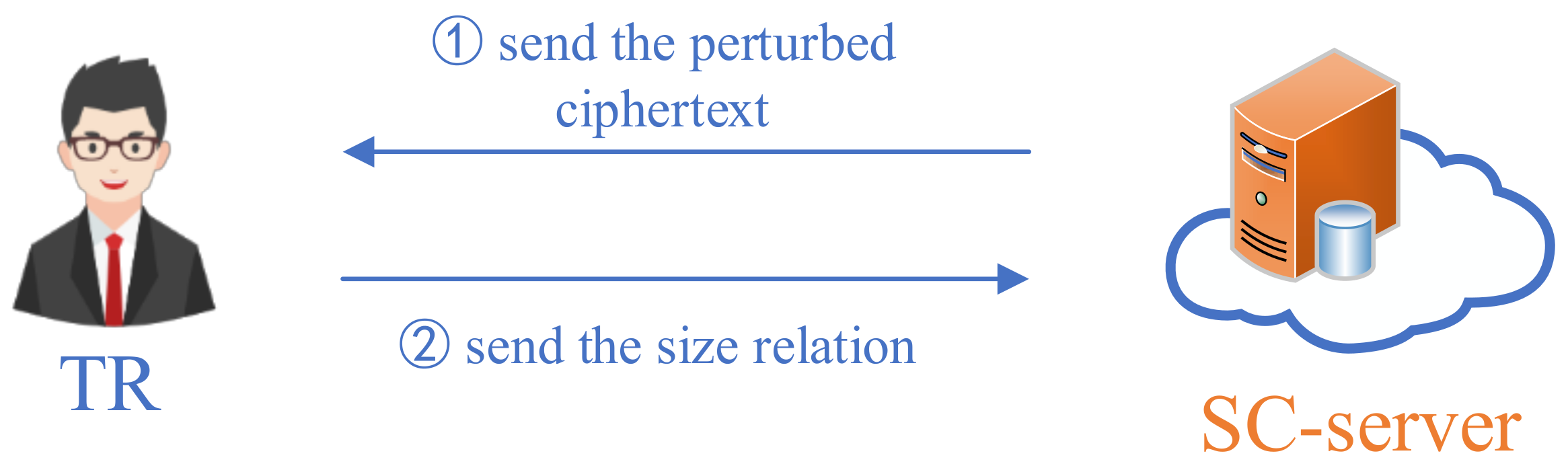
The SC server owns the computed ciphertext but cannot get the size relation because it does not have the private key. So, it needs the help of TR. However it cannot send the ciphertext directly to the TR because the TR has the private key and the location of the task. If the ciphertext is sent directly to the TR, then the TR can project the location of the TWs. So, as shown in
Figure 5, the SC server performs a perturbation operation before transmission, and the TR decrypts the received message and returns the size relation to the SC server. The details are described below.
Assume the length of a public key (N) is
L and the encrypted numbers to be compared are recorded as
. For security purposes, a typical public key length needs to be greater than or equal to 256 bits. Therefore, the number of bits in the values of
A,
B is much smaller than
L. Let the perturbation value be
.
xi is a random integer for perturbing, ranging from −64 to 64 without 0. Since it is all positive integers in the Paillier cryptosystem, here, we add
to the difference to avoid an overflow situation. The TR compares the sizes of
and
. If
,
R = 1, if
,
R = −1, if
,
R = 0. Then, the SC server can determine the size relationship of
A,
B based on the values of
R and
xi as shown in the following equation.
Remark 2. is a number. When we addto it, if the result is greater than, it means thatis a positive number, if it is less thanthenis negative, and if it is equal to, thenis equal to 0. There are two levels of perturbation of xi. On the one hand, there is its sign, which denotes A − B if it is positive and B − A if it is negative. on the other hand, we amplify the result of A − B by a factor of xi. The result of |xi| is the number of times the result of A − B. After the perturbation process, the TR can still determineandin relation to each other, but cannot infer one value of A, B from the other. With R = 1 and xi > 0, we get A − B > 0; with R = 1 and xi < 0, we get A − B < 0; with R = −1 and xi > 0, we get A − B < 0; with R = −1 and xi < 0, we get A − B > 0; with R = 0, we get A = B. So, we can get the above equation. With this, we can easily complete the comparison operation of encrypted data without revealing private information.
4.3. Privacy-Preserving Travel Distance Calculation Protocol
In this subsection, we propose a privacy-preserving travel distance calculation protocol based on PC. Denote the PC operation as
P(
A,
B).
A and
B are the ciphertexts to be compared and the return value is the size relationship between
A and
B. Now, we design the protocol that implements steps ④ and ⑤. In ④, the goal is to find candidate TWs who meet the requirements. In ⑤, the goal is to find the optimal TW. To satisfy the judgment condition of the task assignment, as shown in Equation (5), we need to calculate
,
,
,
. Assume that the coordinates of
,
,
are
,
,
, respectively. We can expand these equations as follows.
We convert the time point to the number of minutes elapsed so that the time can be converted into an integer for operation.
To protect privacy, we encrypt this information with TR’s Paillier public key. We use
to denote the Paillier encryption ciphertext of
. According to the Paillier cryptosystem, we can use the following equation with the encryption task information to calculate the desired distance cipher.
In ①, a TR sends the , , , , and TD to the SC server.
In ②, TWs select a task on the SC server based on the task description and task start time as well as download the task information from it.
In ③, each TW adds their encrypted information to the downloaded encrypted task information and sends the encrypted information back to the SC server, as , ,, ,, , .
In ④, the SC server performs a perturbation operation on the values to be compared and the following operations with the assistance of TR: PC(
,
), PC(
,
), PC(
,
), PC(
,
). Based on the well-judged size relation, the server can compute
,
, and calculate
,
according to the following equation.
The SC server figures out candidate TWs who meet the constraints based on the following PC operations: PC(,), PC(,).
In ⑤, the SC server puts the TWs who passed the judgment in ④ into set
and puts their corresponding S
1 into set
. PC operations are performed continuously in the set
until the optimal TW is selected and the algorithm is described as follows (Algorithm 1).
| Algorithm 1: Find Optimal TW |
Input:
Output: The number of WSmin
Initialize min = 1;
.length
),
min = get the number of the small WS1 |
| Return min; |
In ⑥, finally, the SC server establishes a connection between them according to the number.
5. Security Analysis
In this section, we analyze the security of PKGS in the process of task constraint determination and choosing optimal TW. In other words, PC and travel distance calculation protocol is secure as same as Paillier.
Theorem 1. If the Paillier cryptosystem is secure, then the PC protocol is secure.
Proof. For the SC server, the data are always in the form of ciphertext to be computed during the comparison process. Since it has no private key, it cannot decrypt the encrypted data. In other words, if the Paillier is secure, then the server cannot get the user’s location information during the comparison process. For the TR, even though she/he has the private key to decrypt the ciphertext, the ciphertext has been perturbed. This also prevents the TR from obtaining the TWs’ location information. Since the TR has the private key and the ciphertext is meaningless to him, we next analyze it in plaintext. In the process of perturbation, we randomly disturbed the position of the subtractor and the subtracted number and subjected the result of calculations to random magnification. This makes it impossible for the TR to distinguish the actual difference and to know the exact magnitude relationship, thus making it impossible to speculate on the location of the workers. □
Theorem 2. If the Paillier cryptosystem is secure, then the travel distance calculation protocol does not reveal the location.
Proof. In the previous theorem, it was shown that the TR cannot infer the location of TWs from the PC protocol. Next, we analyze the security for TWs and the SC server in the travel distance calculation protocol. For TWs, since they do not have the private key, they cannot decrypt the ciphertext, and no result is returned after they add the encrypted message. If the Paillier cryptosystem is secure, the TWs cannot guess the location of the task. For the SC server, it performs operations on the ciphertext, but the result of the computation is still the ciphertext. Moreover, it has no private key, so it cannot decrypt the ciphertext. The TR decrypts the ciphertext and returns the size relation instead of the specific result of the calculation. That is, if the Paillier cryptosystem is secure, it cannot get the location information of any party. □


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}






