
Digital Twin 3D System for Power Maintenance Vehicles Based on UWB and Deep Learning
Abstract
:1. Introduction
- A chaotic particle swarm optimization TDOA/AOA algorithm is proposed to improve the TDOA/AOA method in order to find the optimal method and improve positioning accuracy with less UWB stations and antennas.
- An improved YOLOv5 state recognition network for vehicle arms has been designed. We used a long-edge definition method (LDM) and a circular smoothing labeling (CSL) complex model to achieve state recognition of rotating arms. Additionally, we introduced a CBAM attention mechanism to enhance feature extraction of the network, while employing the SIoU loss function to reduce loss value and enhance the nonlinear segmentation ability of the network. Comparative experimental results demonstrate the superiority of our method in achieving state-of-the-art performance.
- A three-dimensional digital twin monitoring system is designed; the location of the vehicle and status of the arm are live updated in the twin monitoring system.
2. Digital Twinning Route
2.1. CPSO + TDOA/AOA Algorithm
2.2. YOLOv5-CSL for Vehicle Arm Recognition
2.2.1. YOLOv5-CSL with Attention Mechanism
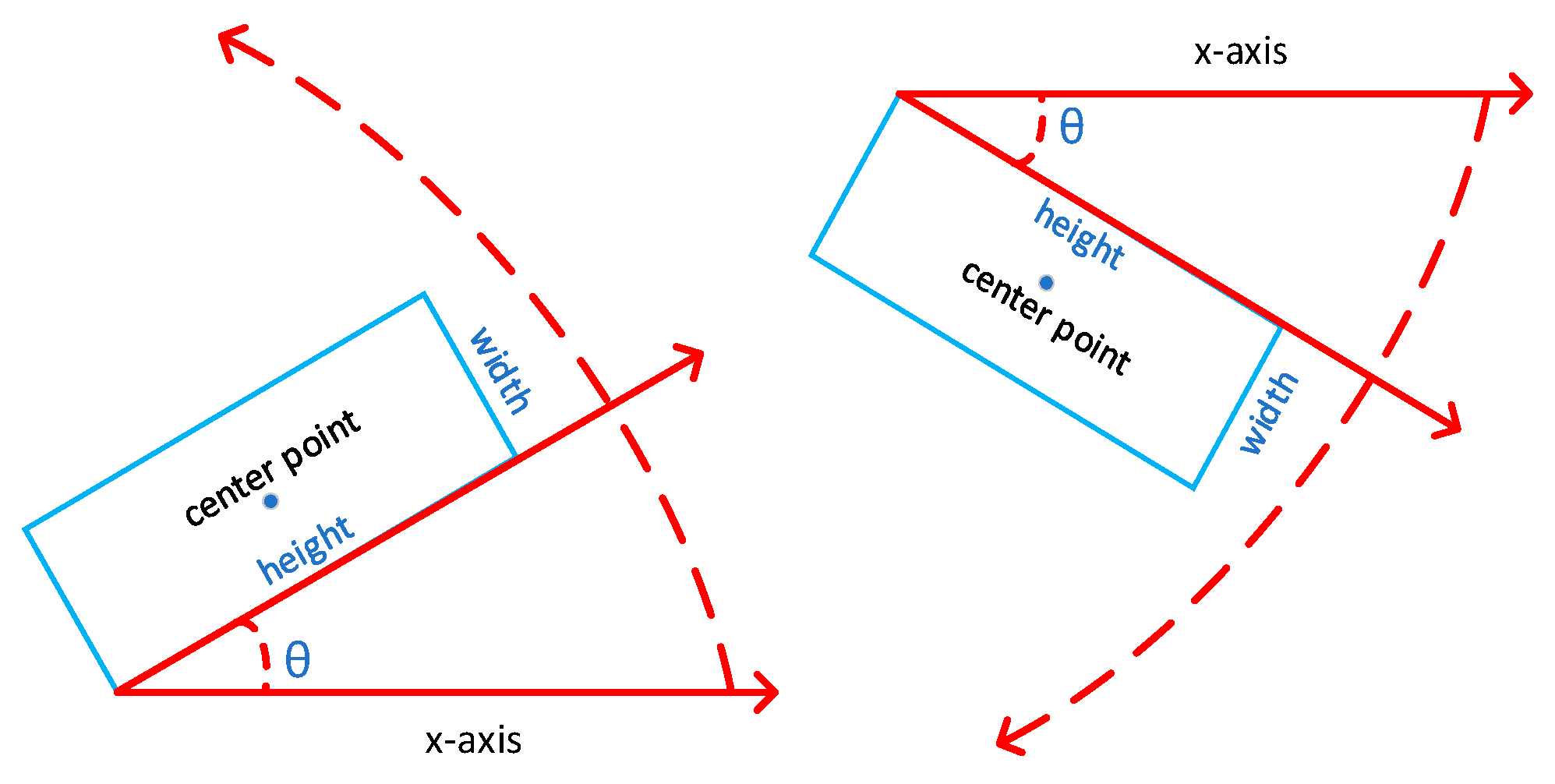
2.2.2. Long-Edge Definition Method with Circular Smoothing Label
2.2.3. HardSwish Convolution Module
3. Maintenance Vehicle State Identification and Three-Dimensional Reproduction
3.1. CPSO + TDOA/AOA Positioning Experiment
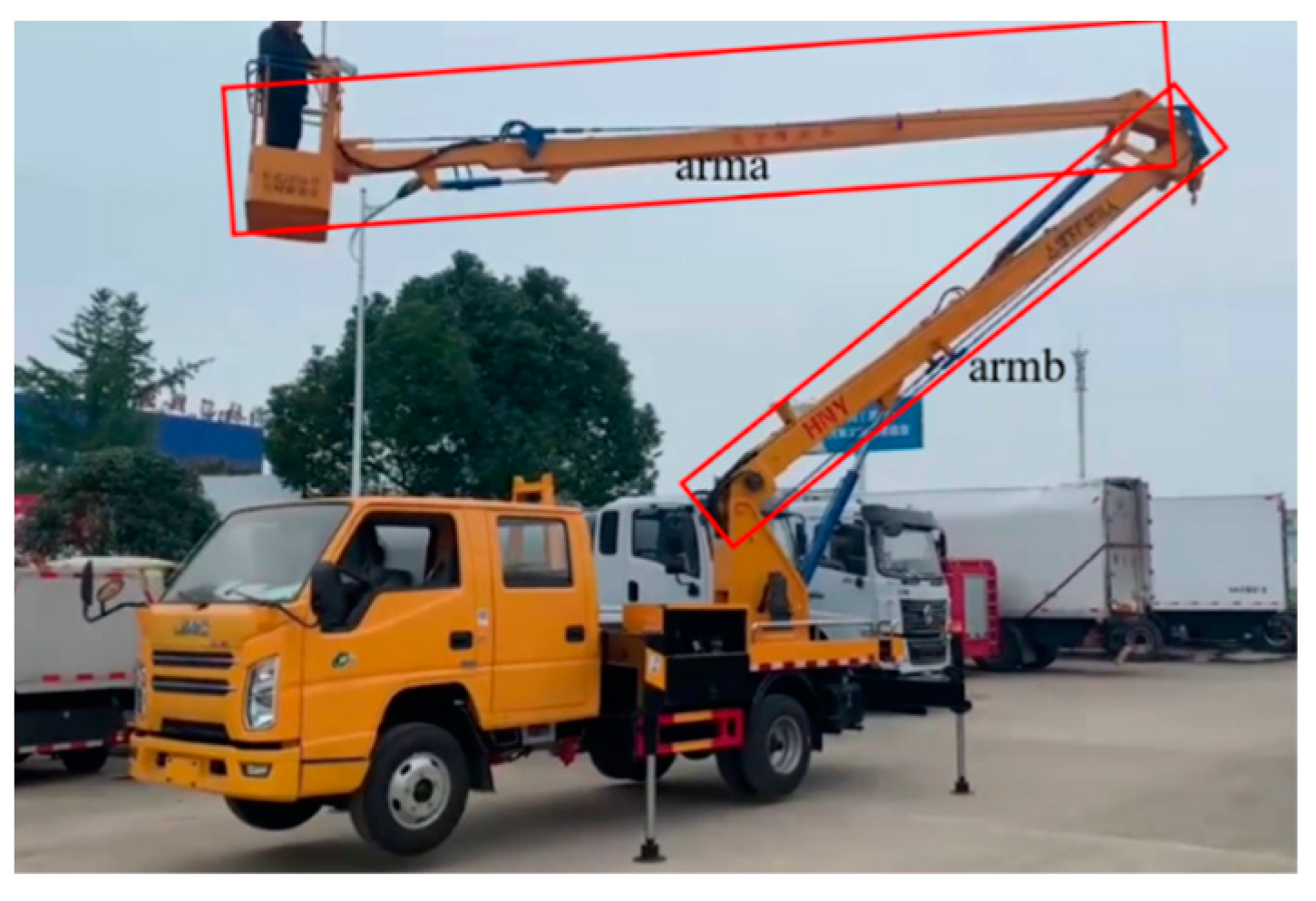
3.2. Experiment of Crank Arm State Recognition
3.2.1. Experimental Environment and Evaluation Criteria
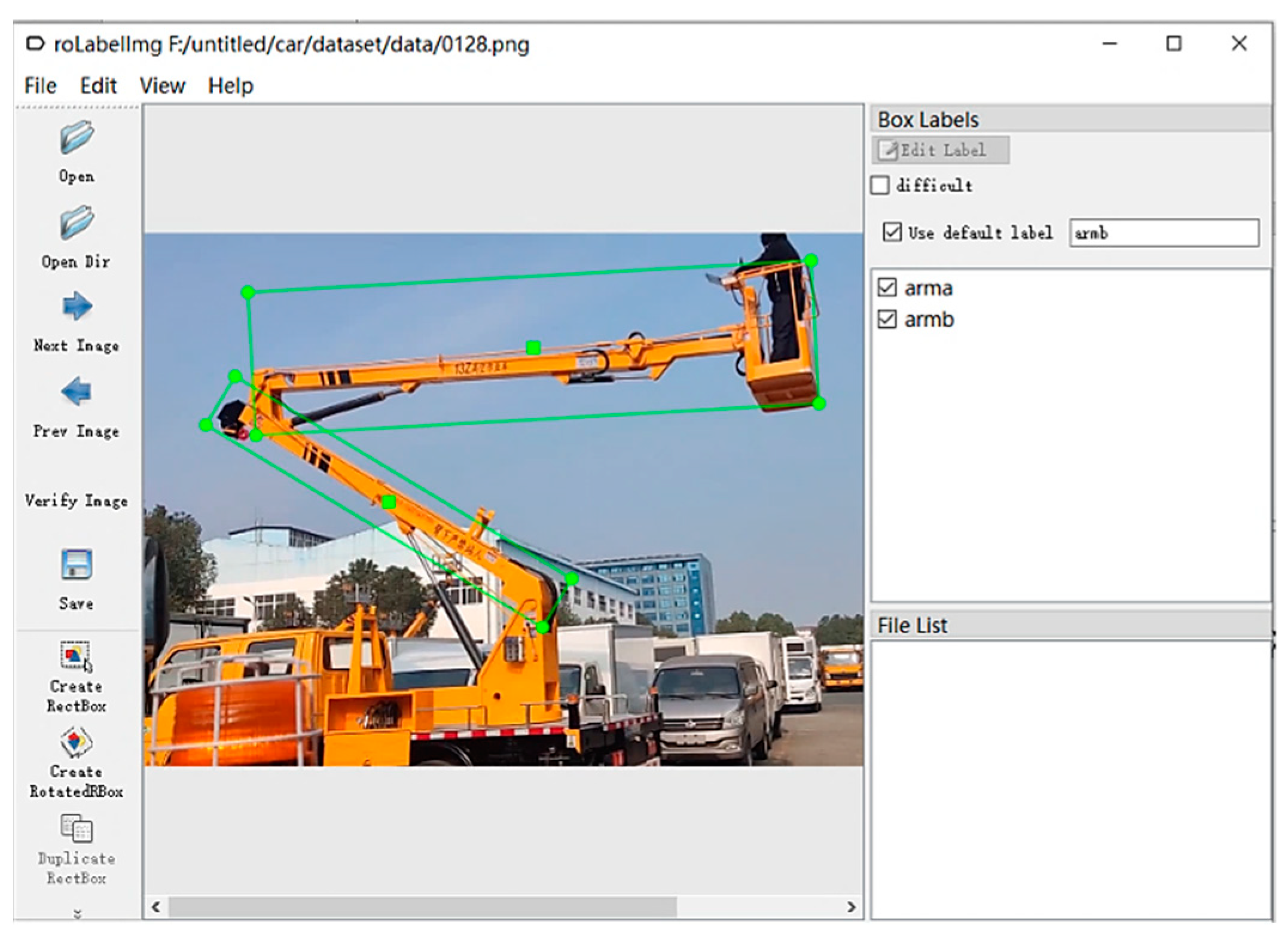
3.2.2. Experimental Data and Data Processing
3.2.3. Experimental Pretreatment
3.2.4. Experimental Comparison
3.2.5. Ablation Experiments
3.3. Vehicle Arm Angle Measurement
3.4. Three-Dimensional Twin Implementation of the Vehicle
4. Conclusions
5. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Liu, C.; Liu, Y.; Zhang, Q.; Li, X.; Wu, T.; Li, Q. A two-stage classification algorithm for radar targets based on compressive detection. EURASIP J. Adv. Signal Process. 2021, 2021, 23. [Google Scholar] [CrossRef]
- Li, J.; Liang, X.; Shen, S.; Xu, T.; Feng, J.; Yan, S. Scale-aware fast R-CNN for pedestrian detection. IEEE Trans. Multimed. 2017, 20, 985–996. [Google Scholar] [CrossRef] [Green Version]
- He, D.; Qiu, Y.; Miao, J.; Zou, Z.; Li, K.; Ren, C.; Shen, G. Improved Mask R-CNN for obstacle detection of rail transit. Measurement 2022, 190, 110728. [Google Scholar] [CrossRef]
- Zhang, K.; Musha, Y.; Si, B. A Rich Feature Fusion Single-Stage Object Detector. IEEE Access 2020, 8, 204352–204359. [Google Scholar] [CrossRef]
- Chen, M.; Duan, Z.; Lan, Z.; Yi, S. Scene Reconstruction Algorithm for Unstructured Weak-Texture Regions Based on Stereo Vision. Appl. Sci. 2023, 13, 6407. [Google Scholar] [CrossRef]
- Redmon, J.; Farhadi, A. YOLO9000: Better, Faster, Stronger. In Proceedings of the IEEE Conference on Computer Vision & Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 6517–6525. [Google Scholar]
- Redmon, J.; Farhadi, A. Yolov3: An incremental improvement. In Proceedings of the Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018. [Google Scholar]
- Lawal, O.M. YOLOMuskmelon: Quest for Fruit Detection Speed and Accuracy Using Deep Learning. IEEE Access 2021, 9, 15221–15227. [Google Scholar] [CrossRef]
- Yuan, Z.; Liu, Z.; Zhu, C.; Qi, J.; Zhao, D. Object Detection in Remote Sensing Images via Multi-Feature Pyramid Network with Receptive Field Block. Remote Sens. 2021, 13, 862. [Google Scholar] [CrossRef]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. Ssd: Single shot multibox detector. In Proceedings of the Computer Vision–ECCV 2016, Amsterdam, The Netherlands, 11–14 October 2016; pp. 21–37. [Google Scholar]
- Zhai, S.P.; Shang, D.R.; Wang, S.H.; Dong, S.S. DF-SSD: An Improved SSD Object Detection Algorithm Based on DenseNet and Feature Fusion. IEEE Access 2020, 8, 24344–24357. [Google Scholar] [CrossRef]
- Zhou, S.R.; Qiu, J. Enhanced SSD with interactive multi-scale attention features for object detection. Multimed. Tools Appl. 2021, 80, 11539–11556. [Google Scholar] [CrossRef]
- Chen, M.; Liu, T.; Xiong, X.; Duan, Z.; Cui, A. A Transformer-Based Cross-Window Aggregated Attentional Image Inpainting Model. Electronics 2023, 12, 2726. [Google Scholar] [CrossRef]
- Lu, L.P.; Li, H.S.; Ding, Z.; Guo, Q.M. An improved target detection method based on multiscale features fusion. Microw. Opt. Technol. Lett. 2020, 62, 3051–3059. [Google Scholar] [CrossRef]
- Lin, Y.T.; Zhang, J.X.; Huang, J.M. Multiscale feature cross-layer fusion remote sensing target detection method. IET Signal Process. 2023, 17, e12194. [Google Scholar] [CrossRef]
- Lin, J.; Bai, D.; Xu, R.; Lin, H. TSBA-YOLO: An Improved Tea Diseases Detection Model Based on Attention Mechanisms and Feature Fusion. Forests 2023, 14, 619. [Google Scholar] [CrossRef]
- Yang, B.; Wang, J. An Improved Helmet Detection Algorithm Based on YOLO V4. Int. J. Found. Comput. Sci. 2022, 33, 887–902. [Google Scholar] [CrossRef]
- Huang, W.J.; Xu, W.F.; Zhang, C.F.; Dong, C.B.; Wan, L. A Dress Detection Model for Power Construction Personnel Combining Alphapose and ResNet. Power Inf. Commun. Technol. 2022, 20, 8. [Google Scholar]
- Hickerson, J.W.; Younkin, J.R. Investigation of the State and Uses of Ultra-Wide-Band Radio-Frequency Identification Technology. In Proceedings of the INMM 51st Annual Meeting, Baltimore, MD, USA, 11–15 July 2010. [Google Scholar]
- Lin, H.Y.; Yeh, M.C. Drift-Free Visual SLAM for Mobile Robot Localization by Integrating.UWB Technology. IEEE Access 2022, 10, 93636–93645. [Google Scholar] [CrossRef]
- Li, M.G.; Zhu, H.; You, S.Z.; Tang, C.Q. UWB-Based Localization System Aided With Inertial Sensor for Underground Coal Mine Applications. IEEE Sens. J. 2020, 20, 6652–6669. [Google Scholar] [CrossRef]
- Lee, G.; Kim, H. A Hybrid Marker-Based Indoor Positioning System for Pedestrian Tracking in Subway Stations. Appl. Sci. 2020, 10, 7421. [Google Scholar] [CrossRef]
- Woo, S.; Park, J.; Lee, J.Y.; Kweon, I.S. Cbam: Convolutional block attention module. In Proceedings of the European Conference on Computer Vision, Munich, Germany, 8–14 September 2018; pp. 3–19. [Google Scholar]
- Song, H.; Choi, K. Transportation Object Detection with Bag of Visual Words Model by PLSA and MLP. Mob. Netw. Appl. 2018, 23, 1103–1110. [Google Scholar] [CrossRef]
- Cai, D.; Campbell, T.; Broderick, T. Edge-exchangeable graphs and sparsity. In Proceedings of the Advances in Neural Information Processing Systems, Barcelona, Spain, 5–10 December 2016. [Google Scholar]
- Sridhar, V.V.; Ramaiah, G.K. Analysis of periodicity in angular data: A comprehensive review. J. Stat. Plan. Inference 2014, 145, 8–26. [Google Scholar]
- Ren, J.; Huang, S.; Song, W.; Han, J. A Novel Indoor Positioning Algorithm for Wireless Sensor Network Based on Received Signal Strength Indicator Filtering and Improved Taylor Series Expansion. Trait. Du Signal 2019, 36, 103–108. [Google Scholar] [CrossRef] [Green Version]
- Hua, C.; Zhao, K.; Dong, D.; Zheng, Z.; Yu, C.; Zhang, Y.; Zhao, T. Multipath Map Method for TDOA Based Indoor Reverse Positioning System with Improved Chan-Taylor Algorithm. Sensors 2020, 20, 3223. [Google Scholar] [CrossRef]
- Cao, L.; Chen, H.; Chen, Y.; Yue, Y.; Zhang, X. Bio-Inspired Swarm Intelligence Optimization Algorithm-Aided Hybrid TDOA/AOA-Based Localization. Biomimetics 2023, 8, 186. [Google Scholar] [CrossRef] [PubMed]
- Bi, J.; Zhao, M.; Yao, G.; Cao, H.; Feng, Y.; Jiang, H.; Chai, D. PSOSVRPos: WiFi indoor positioning using SVR optimized by PSO. Expert Syst. Appl. 2023, 222, 119778. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Network Model | AP/% | mAP/% | Parameters/MB | FPS | Perror/% | |
|---|---|---|---|---|---|---|
| arma | armb | |||||
| R-Faster-RCNN | 78.62 | 79.47 | 79.18 | 314.0 | 8.6 | 38.0 |
| R-Reppoints | 87.70 | 66.60 | 75.65 | 280.0 | 14.1 | 74.4 |
| RoI Transformer | 81.12 | 80.76 | 80.94 | 421.0 | 6.2 | 59.2 |
| R-YOLOv5-based | 80.55 | 79.47 | 80.01 | 34.5 | 33.2 | 21.2 |
| R-YOLOv7-based | 88.78 | 80.25 | 84.01 | 42.5 | 30.5 | 12.9 |
| YOLOv5-CSL-CBAM | 89.88 | 80.20 | 85.04 | 35.2 | 32.8 | 13.6 |
| Network Model | HardSwish | SIoU | CBAM | AP/% | mAP/% | |
|---|---|---|---|---|---|---|
| arma | armb | |||||
| R-YOLOv5-Based | × | × | × | 80.55 | 79.47 | 80.01 |
| R-YOLOv5-HardSwish | √ | × | × | 89.30 | 79.01 | 84.16 |
| R-YOLOv5-SIoU | × | √ | × | 89.50 | 80.41 | 84.96 |
| R-YOLOv5-CBAM | × | × | √ | 89.79 | 79.98 | 84.88 |
| YOLOv5-CSL-CBAM | √ | √ | √ | 89.88 | 80.20 | 85.04 |
| Network Model | Predicted Value/o | Prediction Error/o | Average Prediction Error/o | ||
|---|---|---|---|---|---|
| R-Faster-RCNN | 5 | 28 | 5 | 9 | 7.0 |
| R-Reppoints | 12 | 53 | 2 | 16 | 9.0 |
| RoI Transformer | 8 | 45 | 2 | 8 | 5.0 |
| R-YOLOv5-Based | 10 | 35 | 0 | 2 | 1.0 |
| R-YOLOv7-based | 9 | 36 | 1 | 1 | 1.0 |
| YOLOv5-CSL-CBAM | 10 | 38 | 0 | 1 | 0.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, M.; Liu, T.; Zhang, J.; Xiong, X.; Liu, F. Digital Twin 3D System for Power Maintenance Vehicles Based on UWB and Deep Learning. Electronics 2023, 12, 3151. https://doi.org/10.3390/electronics12143151
Chen M, Liu T, Zhang J, Xiong X, Liu F. Digital Twin 3D System for Power Maintenance Vehicles Based on UWB and Deep Learning. Electronics. 2023; 12(14):3151. https://doi.org/10.3390/electronics12143151
Chicago/Turabian StyleChen, Mingju, Tingting Liu, Jinsong Zhang, Xingzhong Xiong, and Feng Liu. 2023. "Digital Twin 3D System for Power Maintenance Vehicles Based on UWB and Deep Learning" Electronics 12, no. 14: 3151. https://doi.org/10.3390/electronics12143151