
Trajectory Tracking Control of Autonomous Vehicles Based on an Improved Sliding Mode Control Scheme


Abstract
:1. Introduction
2. Constructing a System Model
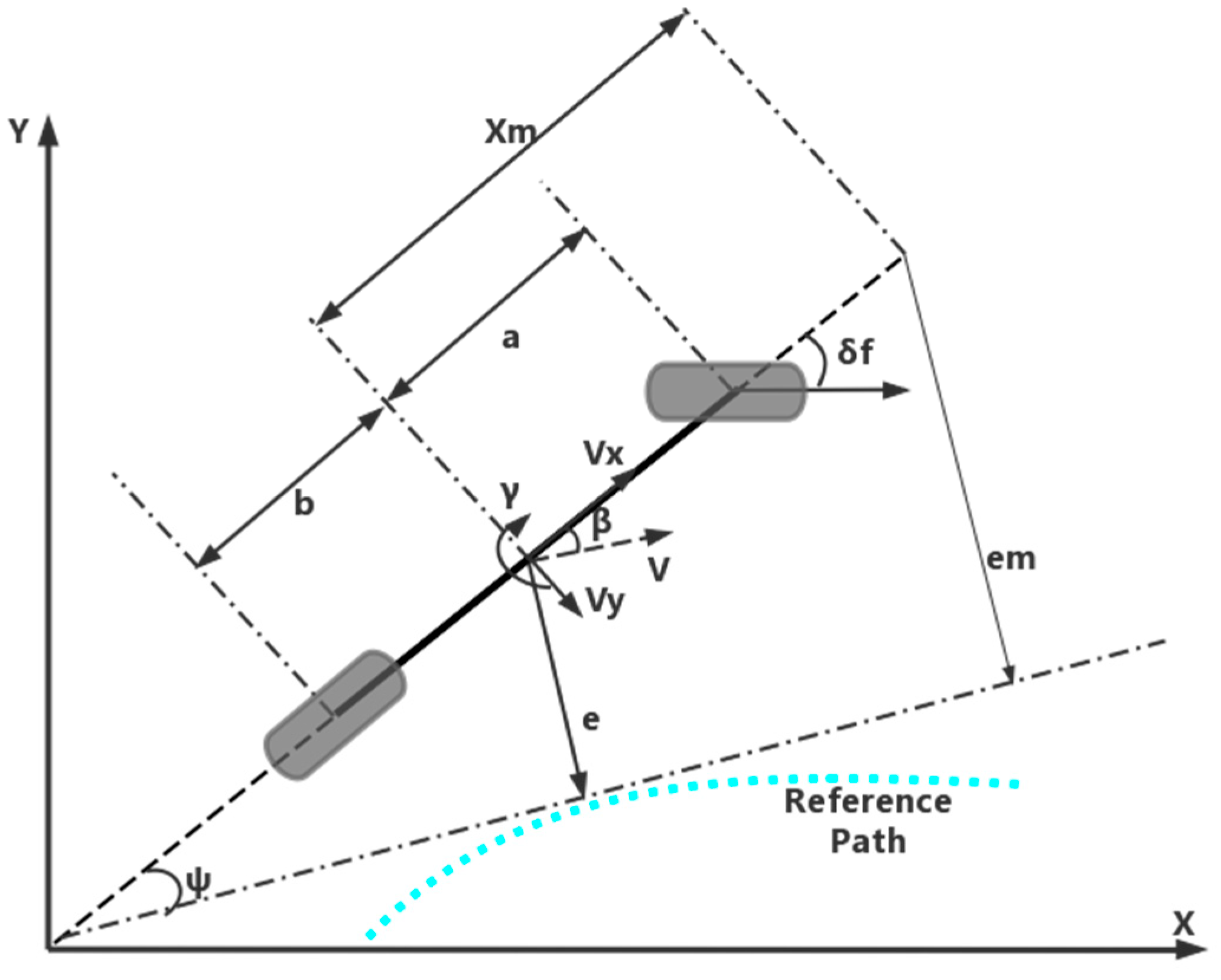
2.1. Vehicle Dynamics Model
2.2. Vehicle Kinematic Model
3. Controller Design
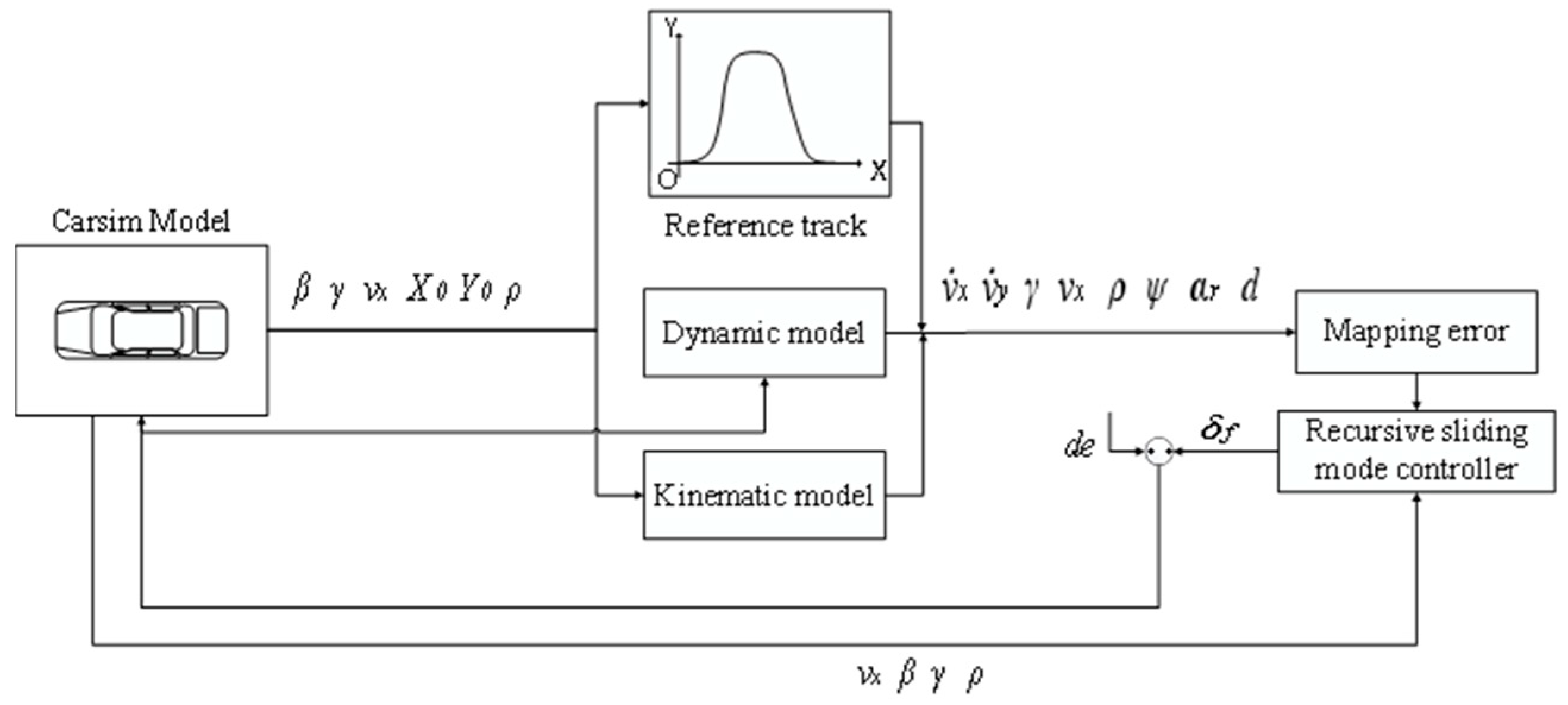
3.1. Controller Structure
3.2. Design of Control Law
3.3. Stability Analysis of the Controller
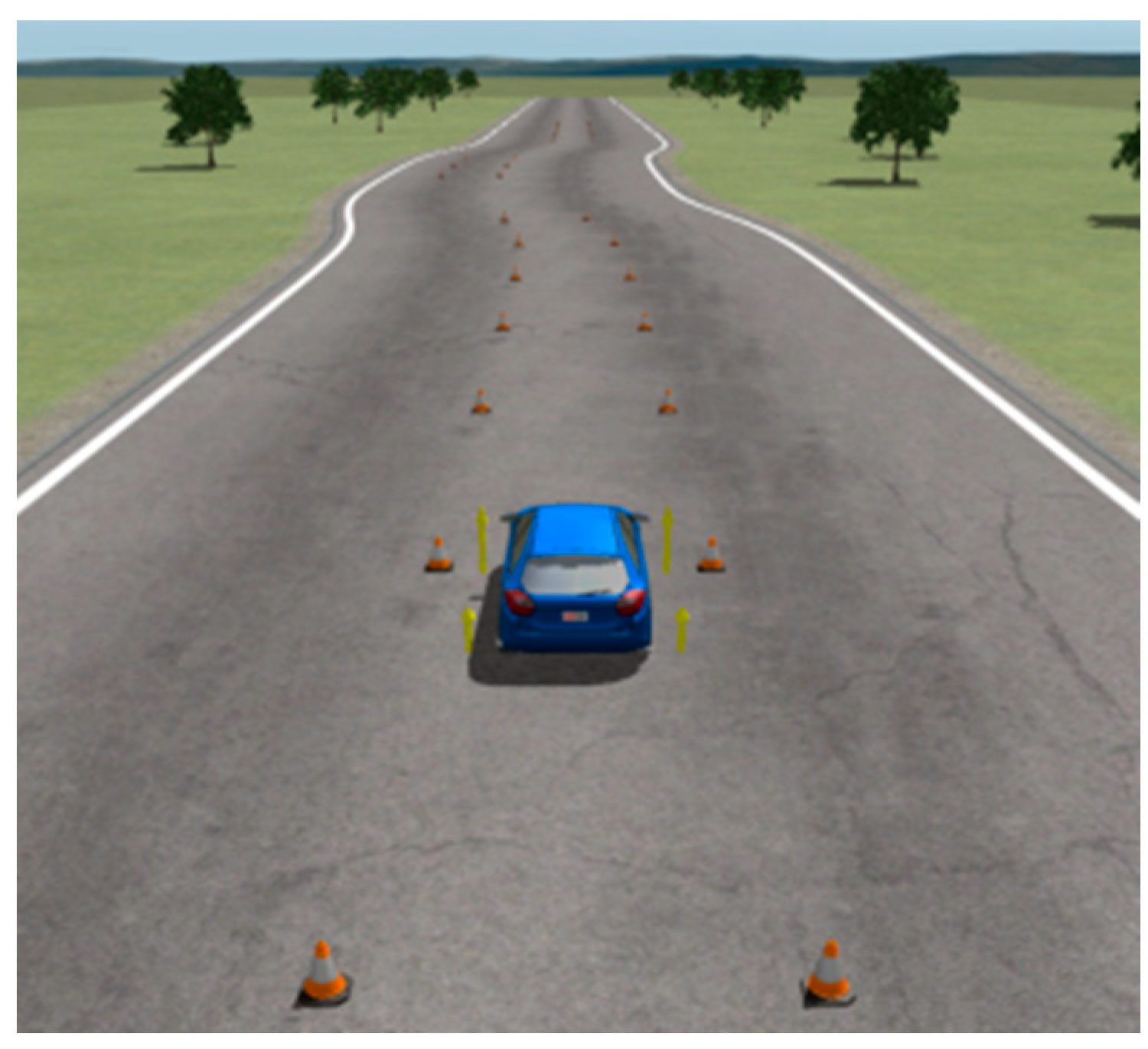
4. Simulation
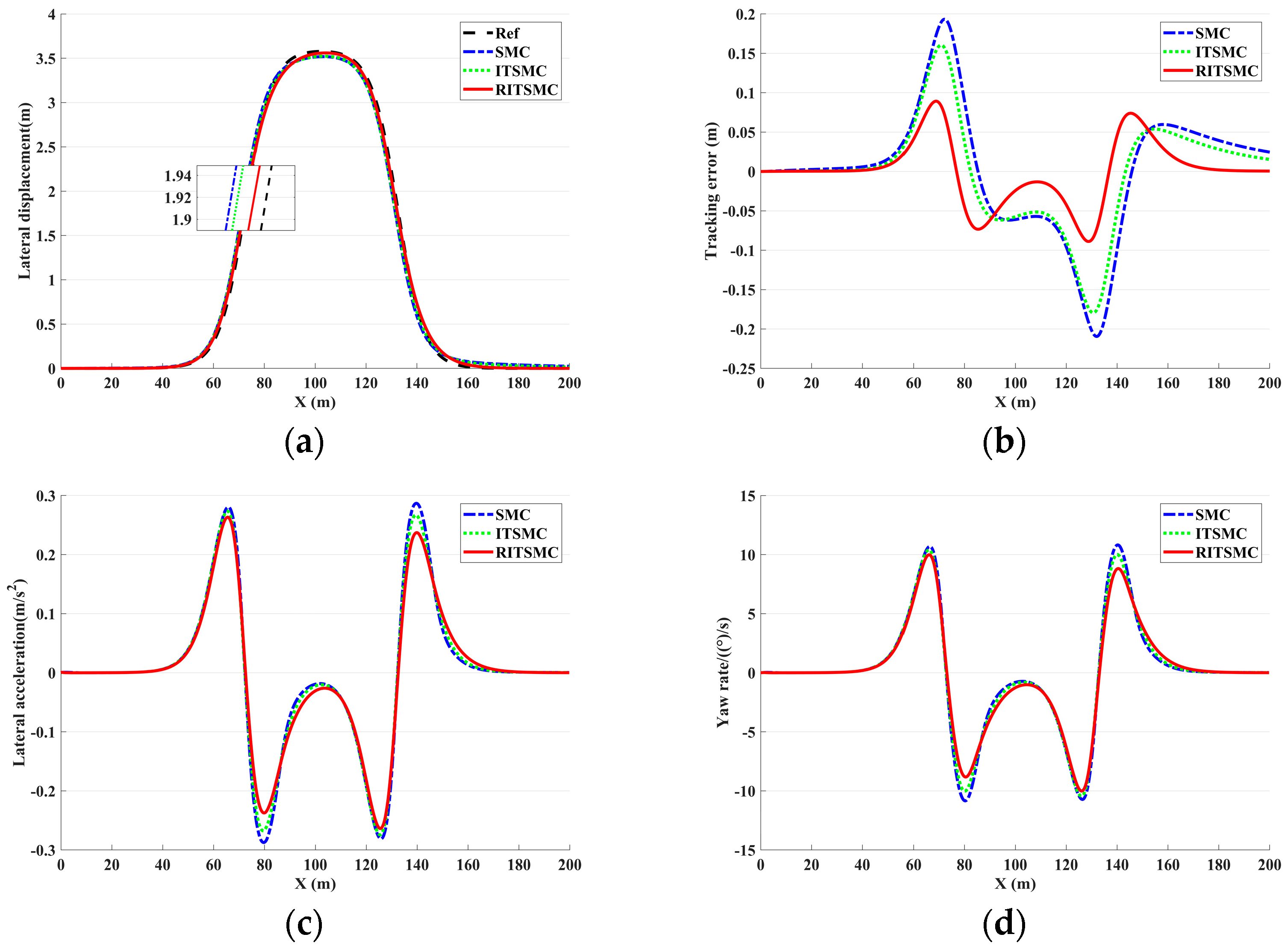
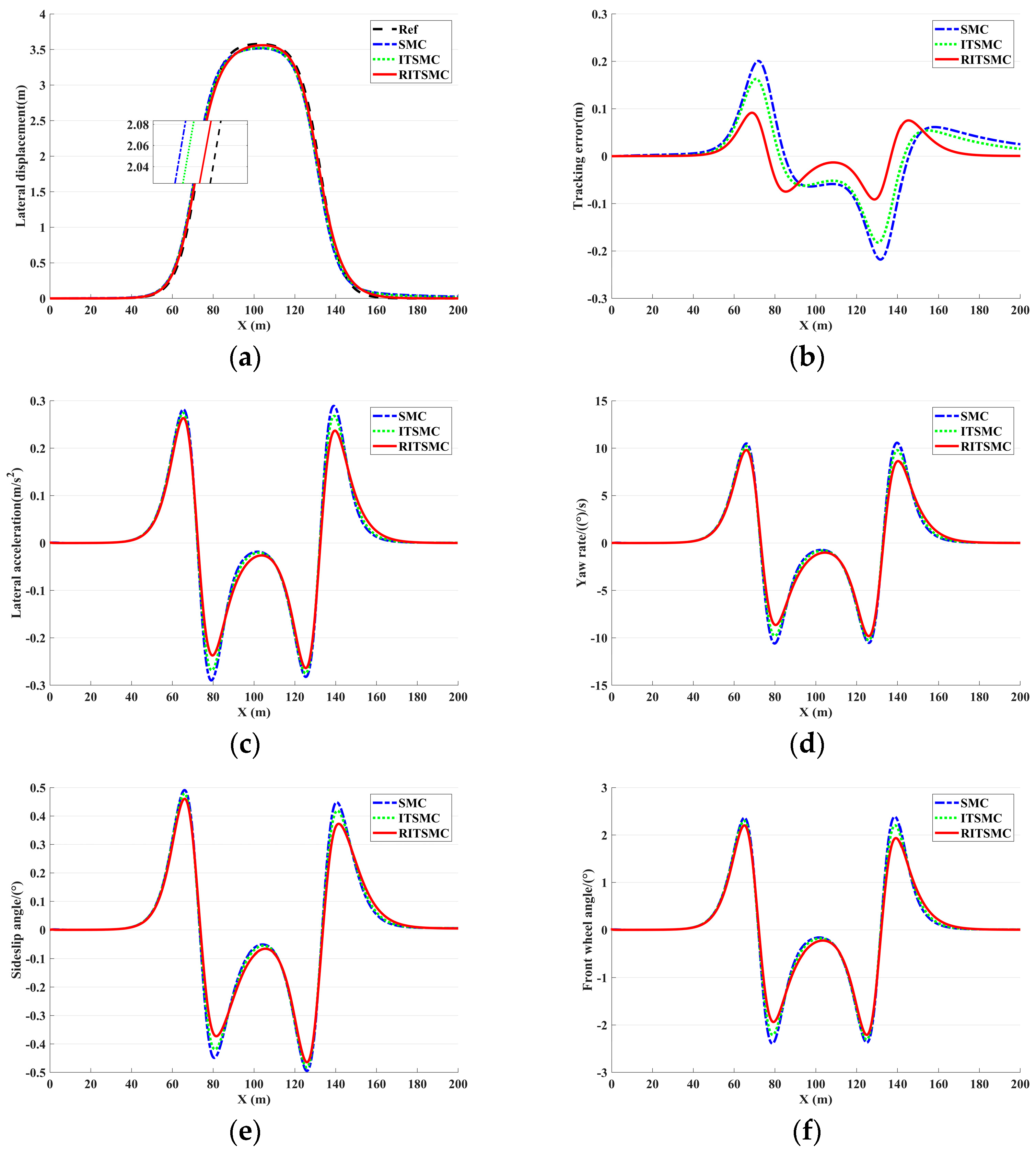
4.1. Double Lane Shift: Comparative Analysis of Controller Effect
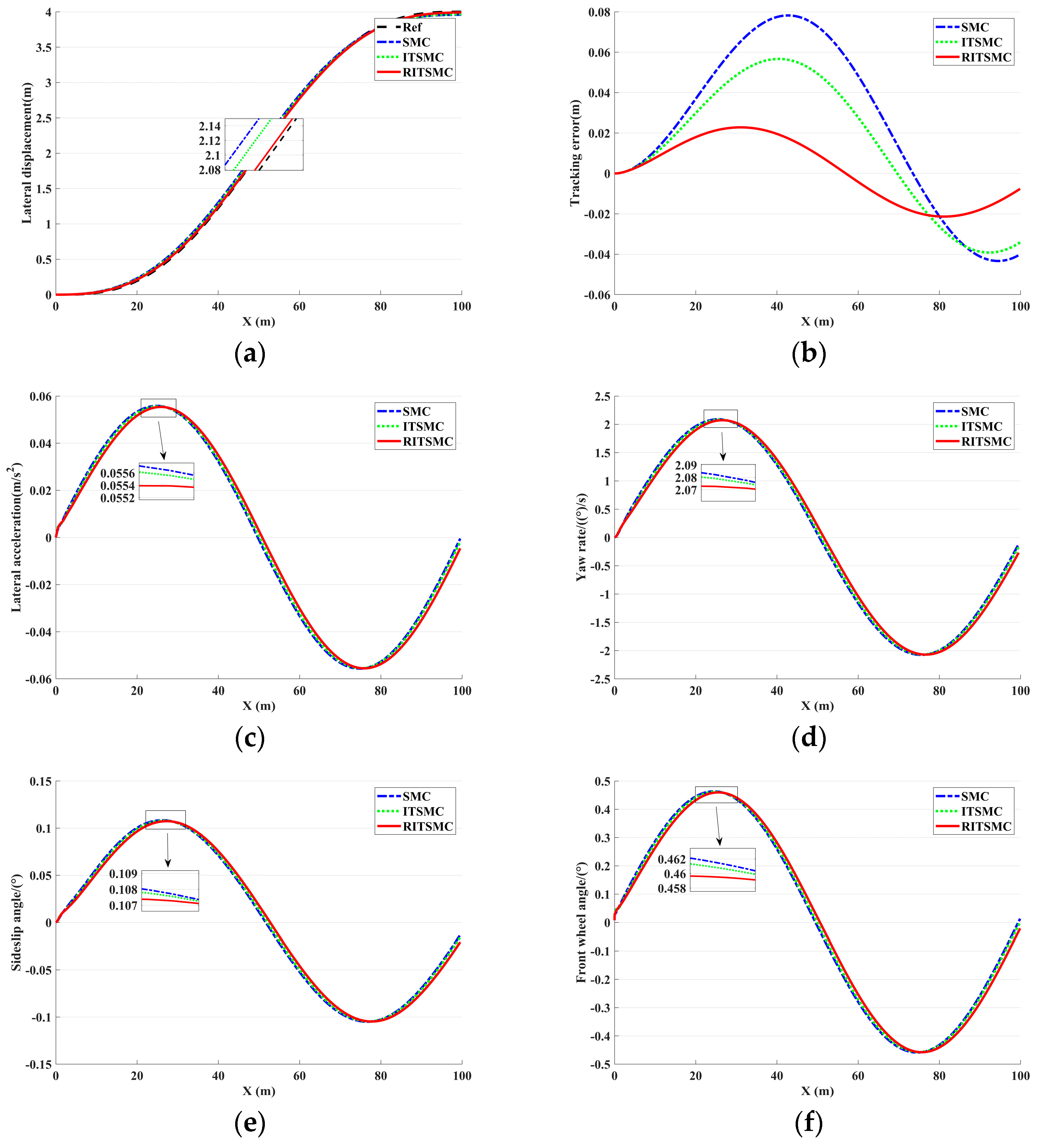
4.1.1. Test Condition 1: Low-Speed Wet Road
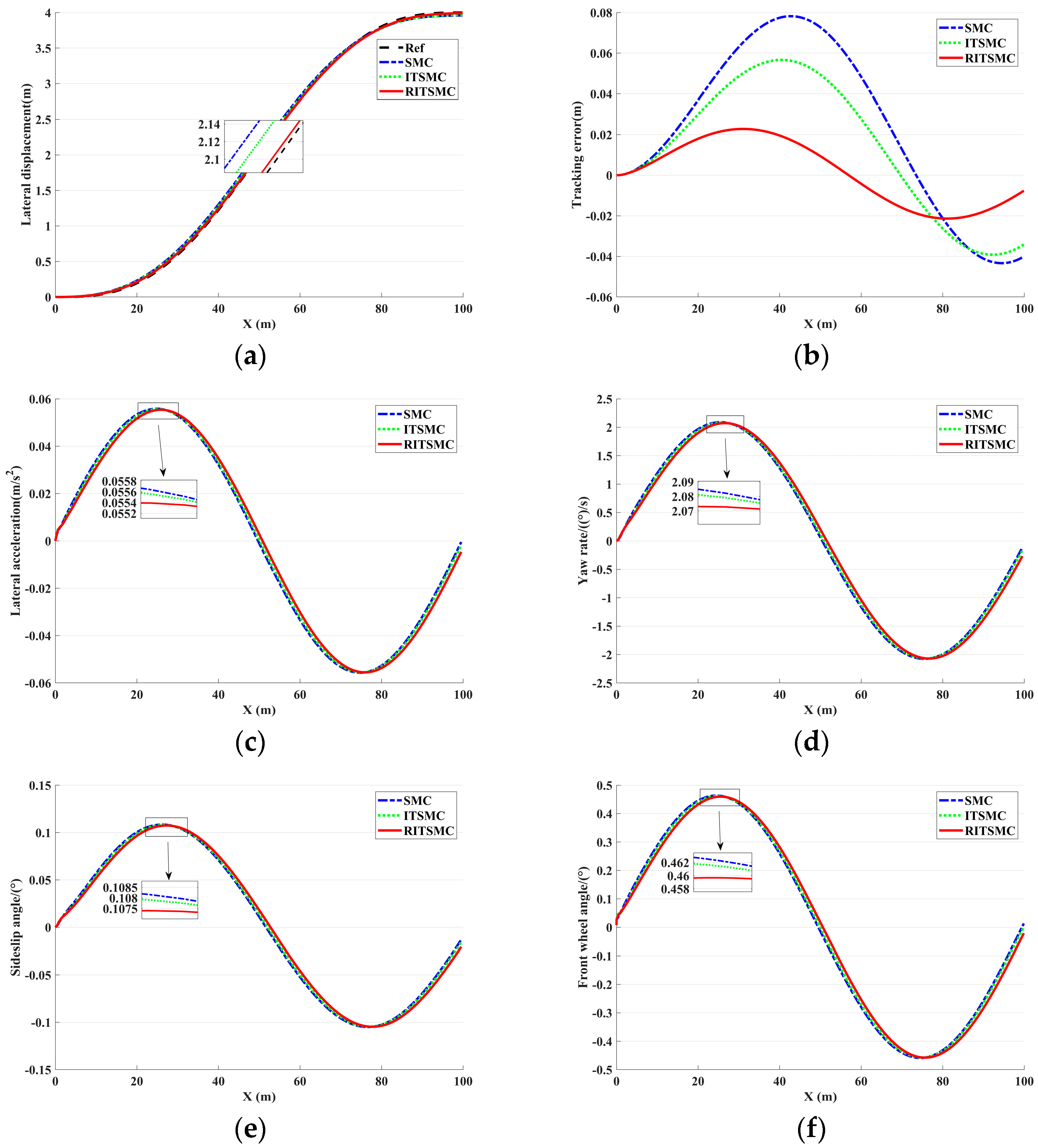
4.1.2. Scenario 2: Low-Speed Dry Asphalt Road Surface
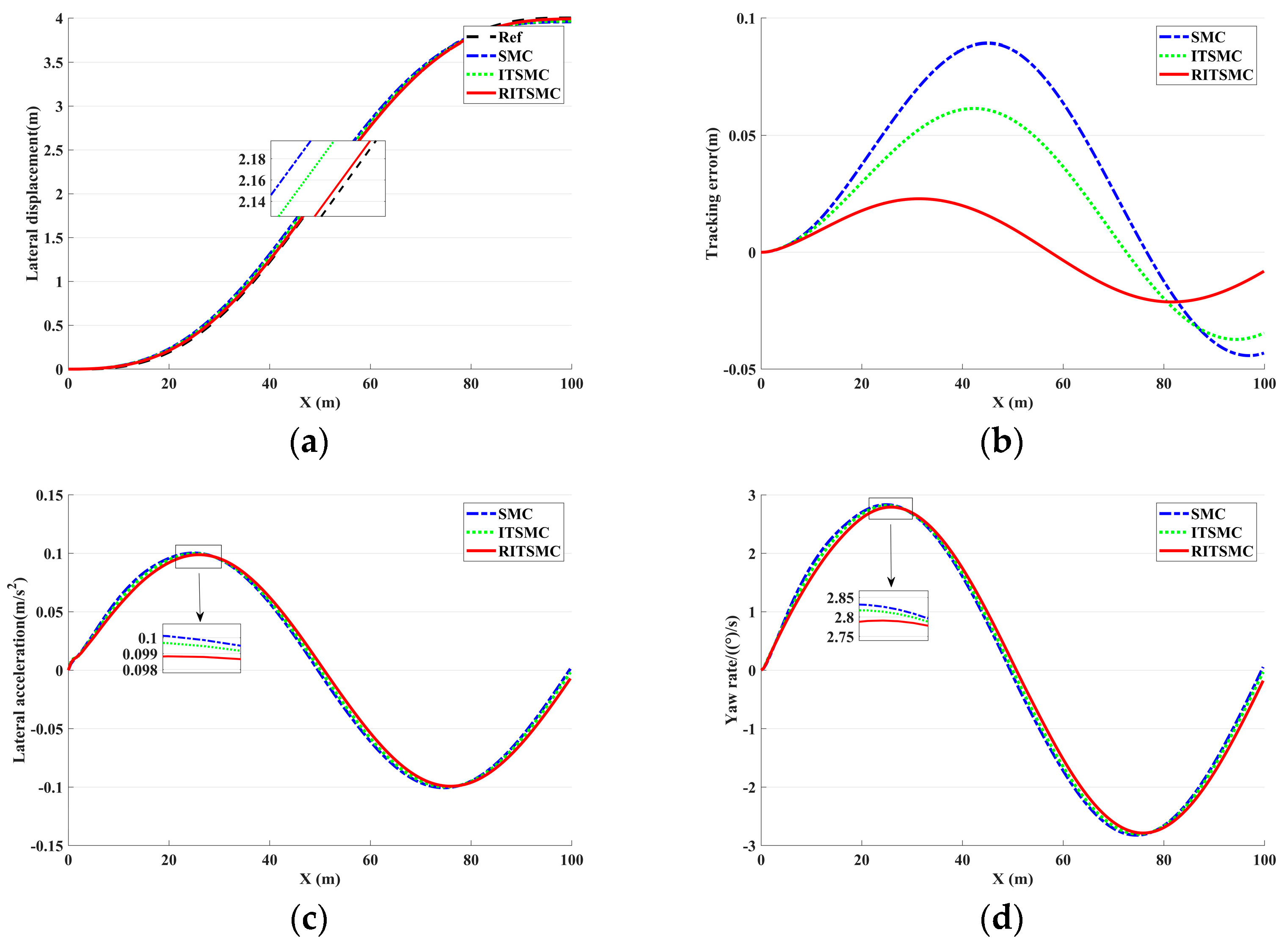
4.1.3. Test Condition 3: High-Speed Dry Asphalt Pavement
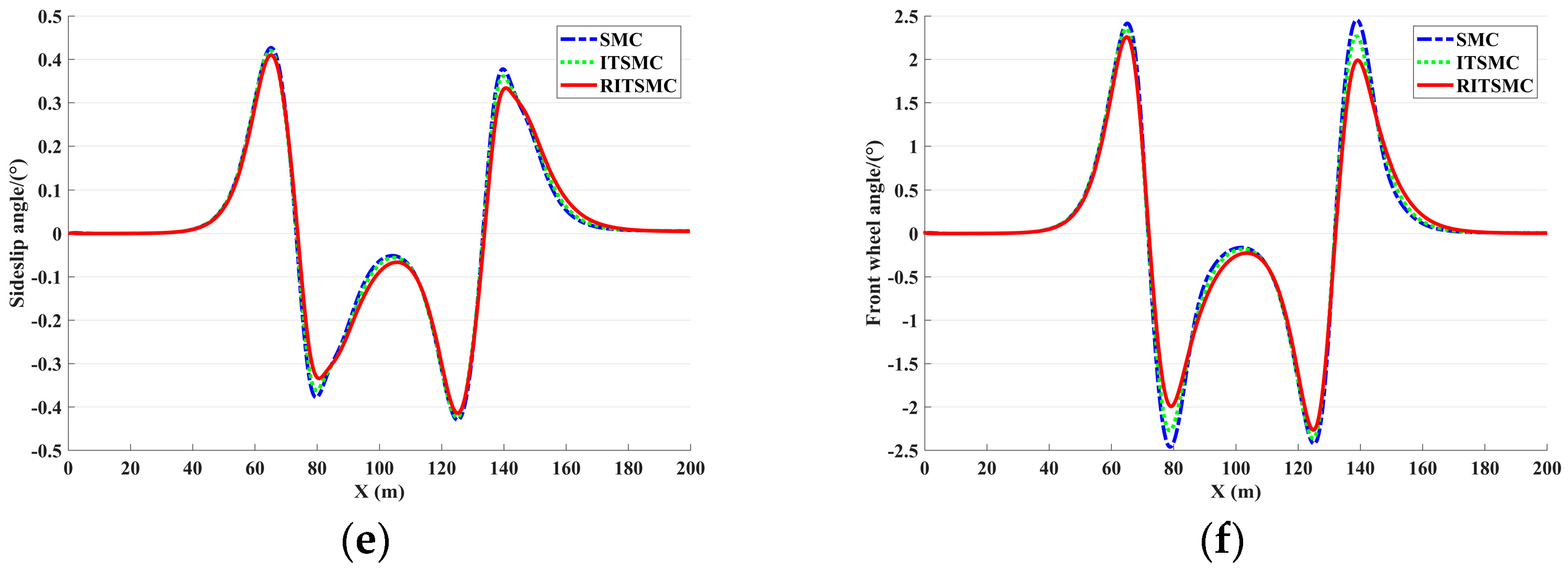
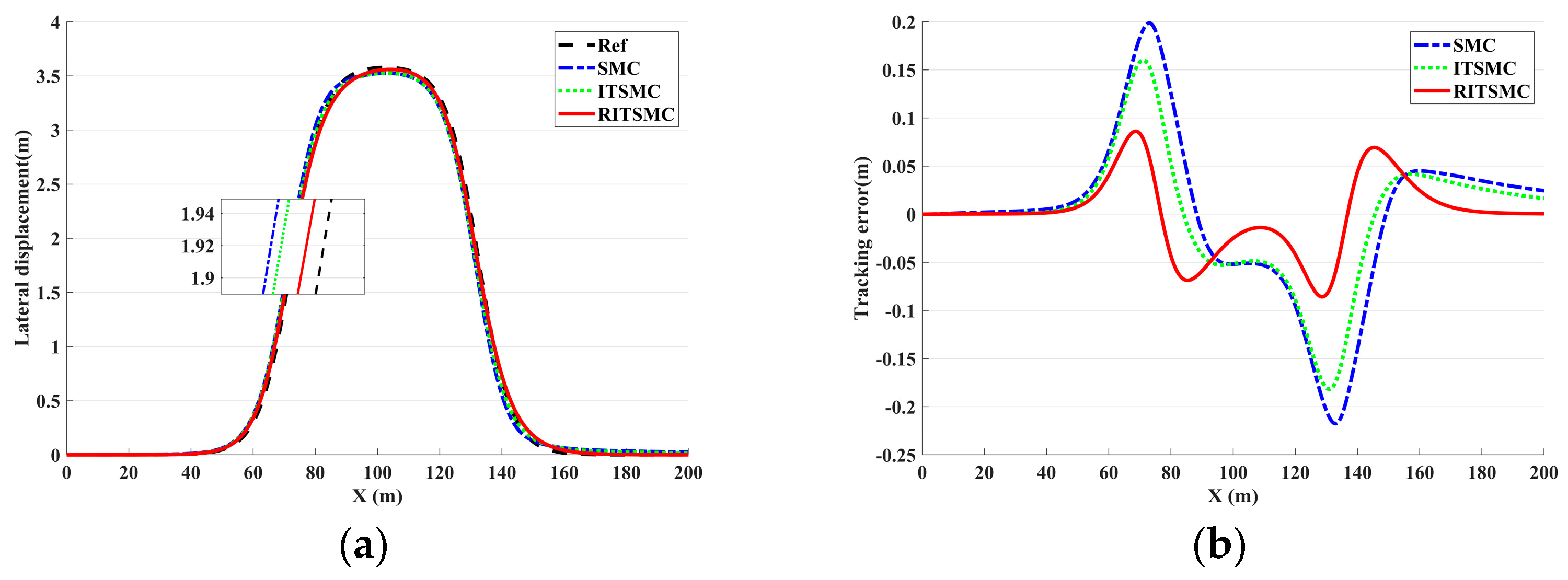
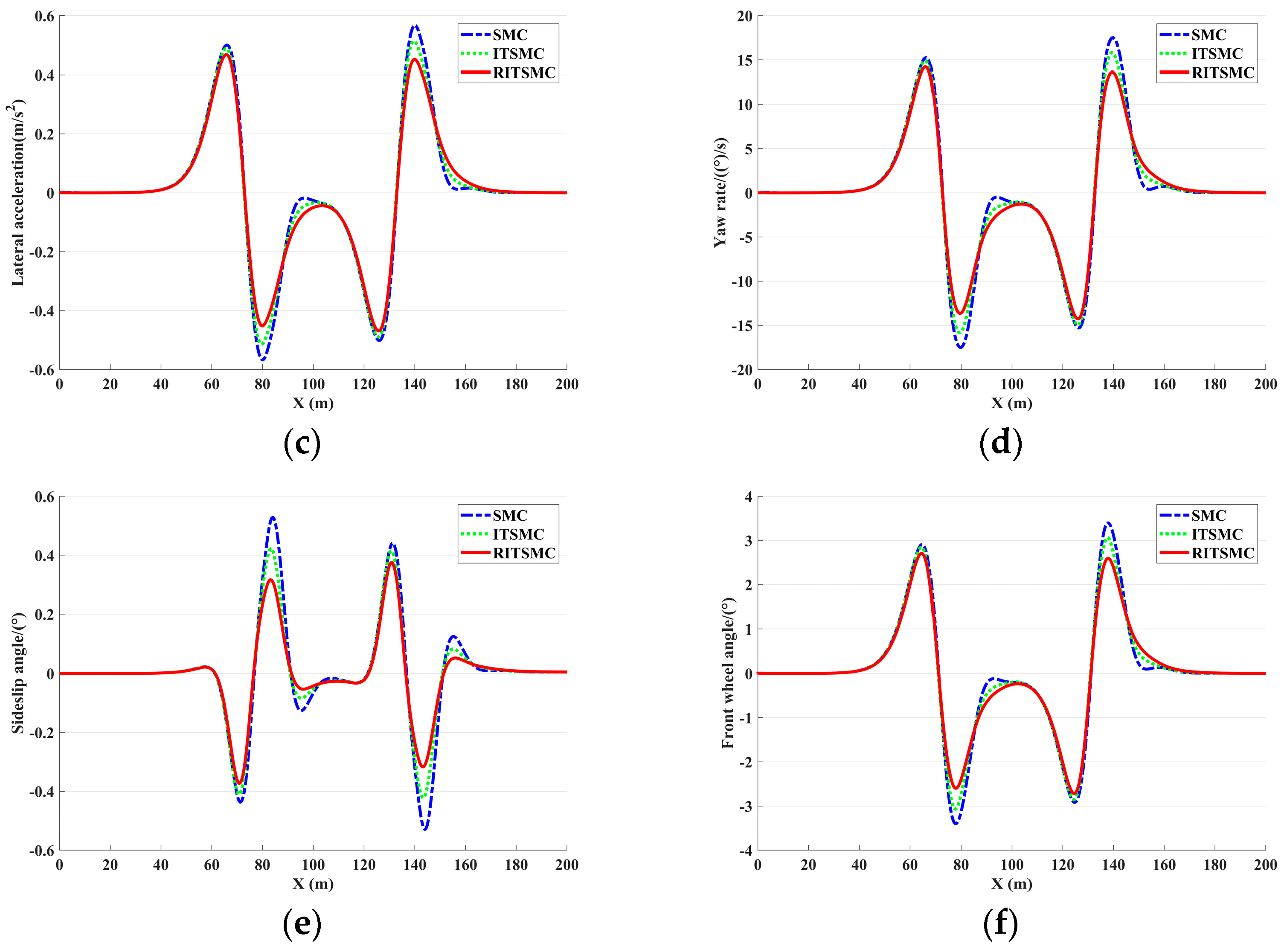
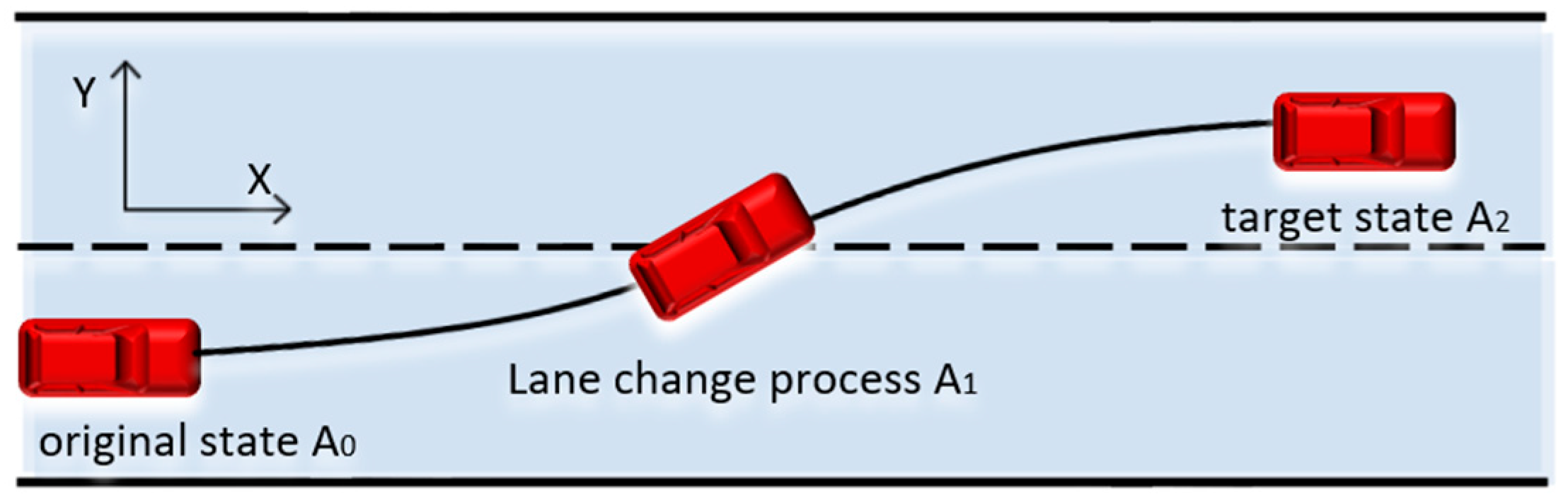
4.2. Single Lane Change: Comparison and Analysis of Controller Effects
4.2.1. Test Condition 1: Low-Speed Wet Slippery Road Surface
4.2.2. Test Condition 2: Low-Speed Dry Asphalt Pavement
4.2.3. Test Condition 3: High-Speed Dry Asphalt Pavement
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Dong, L.; Sun, D.; Han, G.; Li, X.; Hu, Q.; Shu, L. Velocity-Free Localization of Autonomous Driverless Vehicles in Underground Intelligent Mines. IEEE Trans. Veh. Technol. 2020, 69, 9292–9303. [Google Scholar] [CrossRef]
- Li, Y.; Feng, H.; Peng, Z.; Zhou, L.; Wan, J. Diversity-aware unmanned vehicle team arrangement in mobile crowdsourcing. EURASIP J. Wirel. Commun. Netw. 2022, 2022, 56. [Google Scholar] [CrossRef]
- Karmakar, G.; Chowdhury, A.; Das, R.; Kamruzzaman, J.; Islam, S. Assessing Trust Level of a Driverless Car Using Deep Learning. IEEE Trans. Intell. Transp. Syst. 2021, 22, 4457–4466. [Google Scholar] [CrossRef]
- Dong, H.; Xi, J. Model Predictive Longitudinal Motion Control for the Unmanned Ground Vehicle with a Trajectory Tracking Model. IEEE Trans. Veh. Technol. 2021, 71, 1397–1410. [Google Scholar] [CrossRef]
- Song, X.; Shao, Y.; Qu, Z. A Vehicle Trajectory Tracking Method with a Time-Varying Model Based on the Model Predictive Control. IEEE Access 2019, 8, 16573–16583. [Google Scholar] [CrossRef]
- Lu, S. Path Tracking Control Algorithm for Unmanned Vehicles based on Improved RRT Algorithm. In Proceedings of the IEEE 2nd International Conference on Electronic Technology, Communication and Information (ICETCI’22), Changchun, China, 27–29 May 2022; pp. 1201–1204. [Google Scholar]
- Yang, C.; Liu, J. Trajectory Tracking Control of Intelligent Driving Vehicles Based on MPC and Fuzzy PID. Math. Probl. Eng. 2023, 2023, 2464254. [Google Scholar] [CrossRef]
- Liu, M.; Zhao, F.; Yin, J.; Niu, J.; Liu, Y. Reinforcement-Tracking: An Effective Trajectory Tracking and Navigation Method for Autonomous Urban Driving. IEEE Trans. Intell. Transp. Syst. 2021, 23, 6991–7007. [Google Scholar] [CrossRef]
- Zuo, Z.; Yang, X.; Li, Z.; Wang, Y.; Han, Q.; Wang, L.; Luo, X. MPC-Based Cooperative Control Strategy of Path Planning and Trajectory Tracking for Intelligent Vehicles. IEEE Trans. Intell. Veh. 2020, 6, 513–522. [Google Scholar] [CrossRef]
- Nie, Y.; Hua, Y.; Zhang, M.; Zhang, X. Intelligent Vehicle Trajectory Tracking Control Based on VFF-RLS Road Friction Coefficient Estimation. Electron 2022, 11, 3119. [Google Scholar] [CrossRef]
- Huang, C.; Huang, H.; Zhang, J.; Hang, P.; Hu, Z.; Lv, C. Human-Machine Cooperative Trajectory Planning and Tracking for Safe Automated Driving. IEEE Trans. Intell. Transp. Syst. 2021, 23, 12050–12063. [Google Scholar] [CrossRef]
- Nie, Y.; Zhang, M.; Zhang, X. Trajectory Tracking Control of Intelligent Electric Vehicles Based on the Adaptive Spiral Sliding Mode. Appl. Sci. 2021, 11, 11739. [Google Scholar] [CrossRef]
- Wang, H.; Liu, B. Path Planning and Path Tracking for Collision Avoidance of Autonomous Ground Vehicles. IEEE Syst. J. 2021, 16, 3658–3667. [Google Scholar] [CrossRef]
- Huang, Y.; Chen, Y. Vehicle Lateral Stability Control Based on Shiftable Stability Regions and Dynamic Margins. IEEE Trans. Veh. Technol. 2020, 69, 14727–14738. [Google Scholar] [CrossRef]
- Cheng, S.; Li, L.; Guo, H.Q.; Chen, Z.G.; Song, P. Longitudinal Collision Avoidance and Lateral Stability Adaptive Control System Based on MPC of Autonomous Vehicles. IEEE Trans. Intell. Transp. Syst. 2019, 21, 2376–2385. [Google Scholar] [CrossRef]
- He, X.; Liu, Y.; Lv, C.; Ji, X.; Liu, Y. Emergency steering control of autonomous vehicle for collision avoidance and stabilisation. Veh. Syst. Dyn. 2019, 57, 1163–1187. [Google Scholar] [CrossRef]
- Zhang, Z.; Guo, Y.; Gong, D.; Liu, J. Global Integral Sliding-Mode Control with Improved Nonlinear Extended State Observer for Rotary Tracking of a Hydraulic Roofbolter. IEEE ASME Trans. Mechatron. 2022, 28, 483–494. [Google Scholar] [CrossRef]
- Liu, Y.; Yuan, L.; Chen, H.; Wang, P.; Xu, A. Design of single neuron super-twisting sliding mode controller for permanent magnet synchronous servo motor. Front. Energy Res. 2023, 11, 34. [Google Scholar]
- Truong, T.N.; Vo, A.T.; Kang, H.J. A Backstepping Global Fast Terminal Sliding Mode Control for Trajectory Tracking Control of Industrial Robotic Manipulators. IEEE Access 2021, 9, 31921–31931. [Google Scholar] [CrossRef]
- Liu, Y.; Yan, W.; Zhang, T.; Yu, C.; Tu, H. Trajectory Tracking for a Dual-Arm Free-Floating Space Robot with a Class of General Nonsingular Predefined-Time Terminal Sliding Mode. IEEE Trans. Syst. Man Cybern. Syst. 2021, 52, 3273–3286. [Google Scholar] [CrossRef]
- Hu, Y.; Wang, H.; He, S.; Zheng, J.; Ping, Z.; Shao, K.; Cao, Z.; Man, Z. Adaptive Tracking Control of an Electronic Throttle Valve Based on Recursive Terminal Sliding Mode. IEEE Trans. Veh. Technol. 2020, 70, 251–262. [Google Scholar] [CrossRef]
- Mofid, O.; Mobayen, S. Adaptive sliding mode control for finite-time stability of quad-rotor UAVs with parametric uncertainties. ISA Trans. 2018, 72, 1–14. [Google Scholar] [CrossRef] [PubMed]
- Ghadiri, H.; Montazeri, A. Adaptive Integral Terminal Sliding Mode Control for the Nonlinear Active Vehicle Suspension System under External Disturbances and Uncertainties. IFAC PapersOnLine 2022, 55, 2665–2670. [Google Scholar] [CrossRef]
- Bei, S.; Hu, H.; Li, B.; Tian, J.; Tang, H.; Quan, Z.; Zhu, Y. Research on the Trajectory Tracking of Adaptive Second-Order Sliding Mode Control Based on Super-Twisting. World Electr. Veh. J. 2022, 13, 141. [Google Scholar] [CrossRef]
- Ji, X.; He, X.; Lv, C.; Liu, Y.; Wu, J. Adaptive-neural-network-based robust lateral motion control for autonomous vehicle at driving limits. Control Eng. Pract. 2018, 76, 41–53. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Parameters |
|---|---|
| , | Lateral force of the left and right tires of the front axle of the vehicle |
| , | Lateral force of the left and right rear axle tires of the vehicle |
| Vehicle sideslip angle | |
| Vehicle yaw angle speed | |
| Total vehicle mass | |
| Yaw moment of inertia | |
| Transverse and longitudinal speed of vehicle | |
| , | The distance between the center of gravity of the vehicle and the front and rear axles |
| Lateral error | |
| Heading error | |
| Mapping error | |
| Front wheel angle | |
| Constant projection distance | |
| The distance traveled by the vehicle along the reference path | |
| , | Vehicle heading angle and reference path heading angle |
| Transverse and longitudinal acceleration of the vehicle | |
| Path curvature | |
| Front and rear axle lateral stiffness of vehicle | |
| Vehicle rear axle side deflection angle |
| Symbol | Value | Parameters |
|---|---|---|
| 1.015 | Distance from the front axis to the center of mass | |
| 1.895 | Distance from the rear axis to the center of mass | |
| 2.3 | Pre-sighting distance | |
| 1416 | Vehicle quality | |
| 1536.7 | Rotational inertia | |
| −112,600 | Front axle steering stiffness | |
| −89,500 | Rear axle steering stiffness |
| Parameter | Value |
|---|---|
| 0.01 | |
| 25 | |
| 20 | |
| 0.01 | |
| 10 | |
| 10 | |
| 4 | |
| 0.01 | |
| 1 | |
| 3 | |
| 5 | |
| 0.01 | |
| 2 | |
| 0.01 |
| Vehicle Speed/Road Grip /(km/h) | SMC/m | ITSMC/m | RITSMC/m | Opt1 | Opt2 |
|---|---|---|---|---|---|
| 0.21 | 0.18 | 0.09 | 57.1% | 50% | |
| 0.22 | 0.19 | 0.098 | 55.5% | 48.4% | |
| 0.25 | 0.185 | 0.08 | 68% | 56.8% |
| Vehicle Speed/Road Grip /(km/h) | SMC/m | ITSMC/m | RITSMC/m | Opt1 | Opt2 |
|---|---|---|---|---|---|
| 0.0795 | 0.059 | 0.022 | 72.3% | 62.7% | |
| 0.078 | 0.058 | 0.02 | 74.4% | 65.5% | |
| 0.09 | 0.061 | 0.028 | 68.9% | 54% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, B.; Pei, W.; Zhang, Q. Trajectory Tracking Control of Autonomous Vehicles Based on an Improved Sliding Mode Control Scheme. Electronics 2023, 12, 2748. https://doi.org/10.3390/electronics12122748
Ma B, Pei W, Zhang Q. Trajectory Tracking Control of Autonomous Vehicles Based on an Improved Sliding Mode Control Scheme. Electronics. 2023; 12(12):2748. https://doi.org/10.3390/electronics12122748
Chicago/Turabian StyleMa, Baosen, Wenhui Pei, and Qi Zhang. 2023. "Trajectory Tracking Control of Autonomous Vehicles Based on an Improved Sliding Mode Control Scheme" Electronics 12, no. 12: 2748. https://doi.org/10.3390/electronics12122748