
Design and Implementation of a Hierarchical Digital Twin for Power Systems Using Real-Time Simulation
 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Motivation
1.2. Digital Twin Overview and Applications
1.3. Concept of Hierarchical Digital Twins to Improve Simulation Quality
- Extension of measurement data regarding dynamic behavior;
- Continuous online adaption of model parameters with observer algorithms;
- Hardware-in-the-Loop coupled with real-time simulation to provide an online emulation of the physical system;
- Digital snapshots of grid situations for commissioning and operation;
- Vendor-agnostic real-time simulation system for Digital Twin setup.
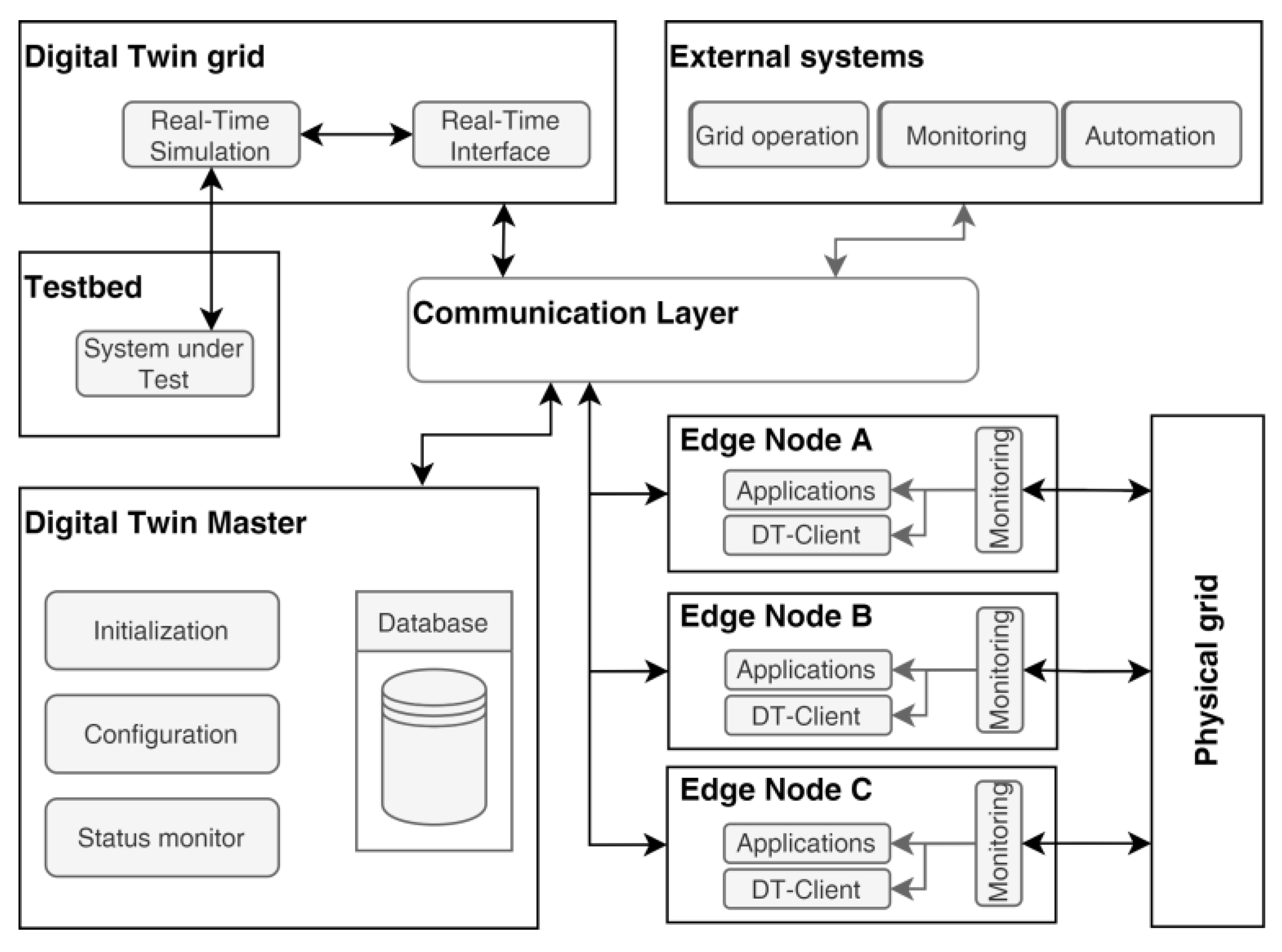
2. Setup and Applications of Hierarchical Digital Twins
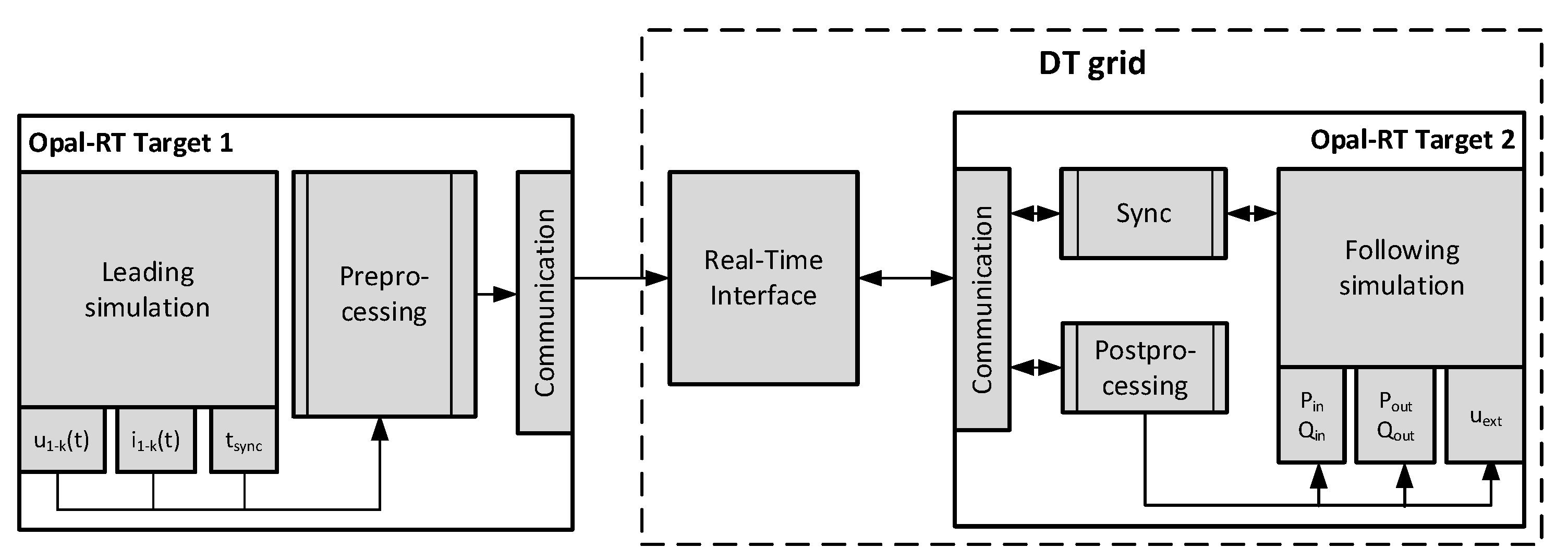
2.1. System Setup and Communication Links
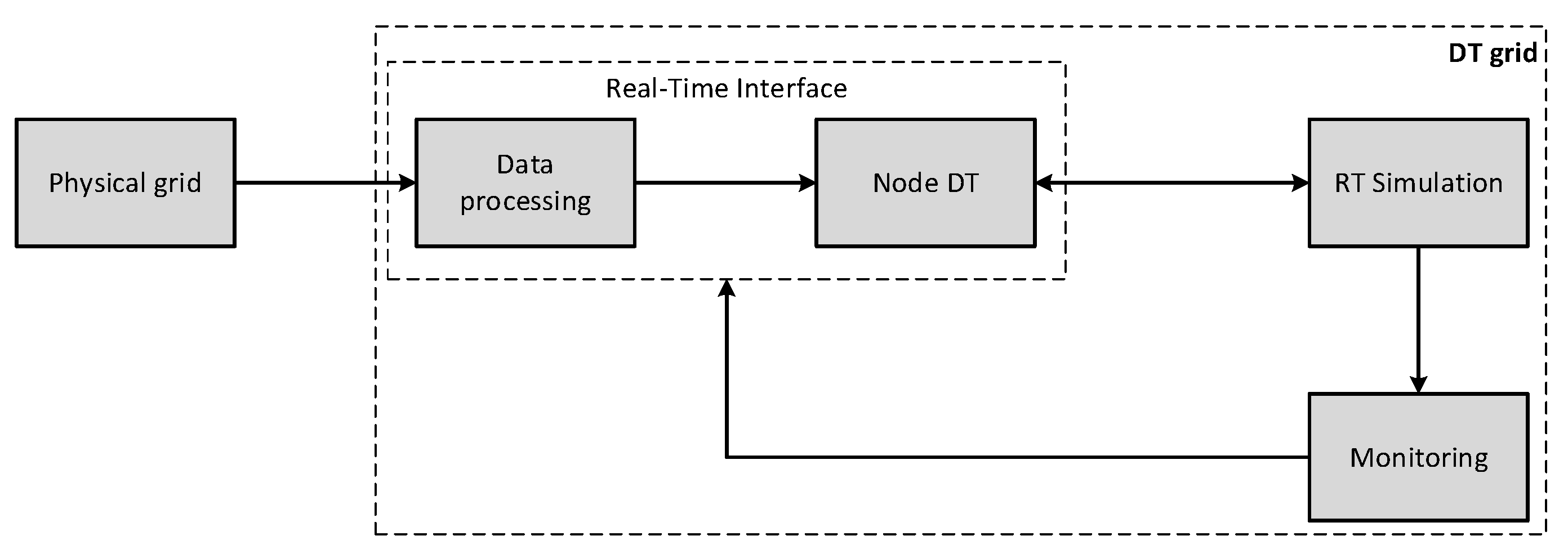
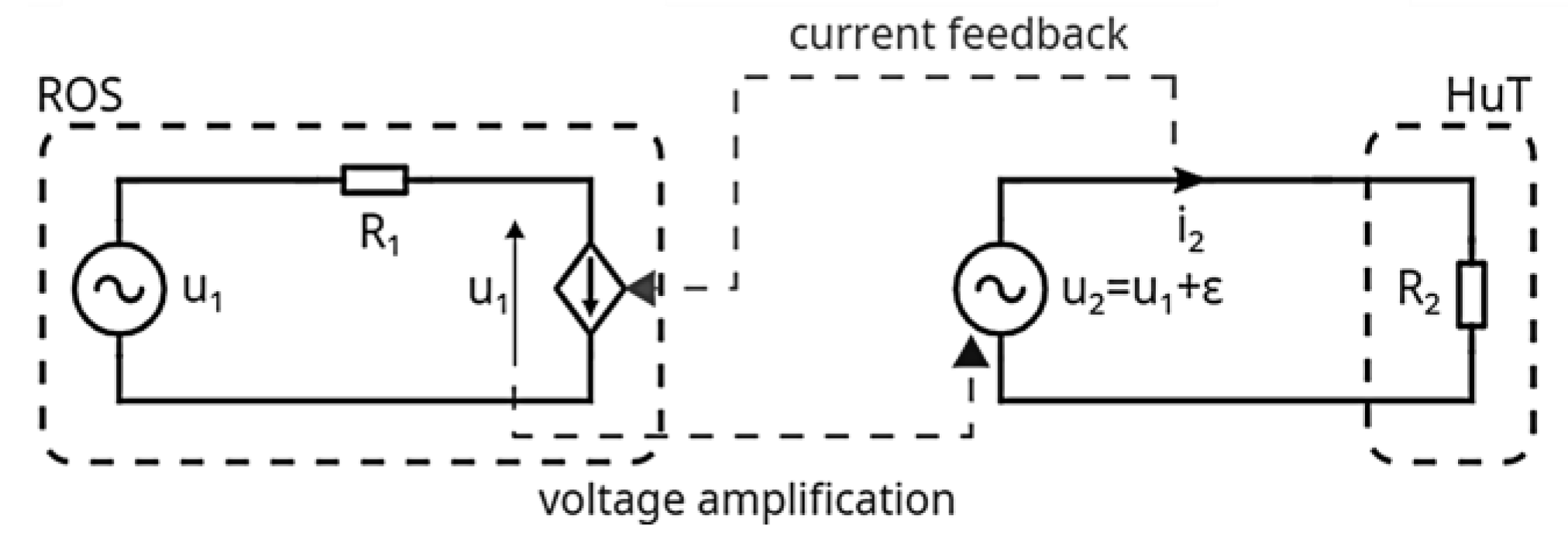
2.2. Real-Time Interface and HiL-Coupled Real-Time Simulation
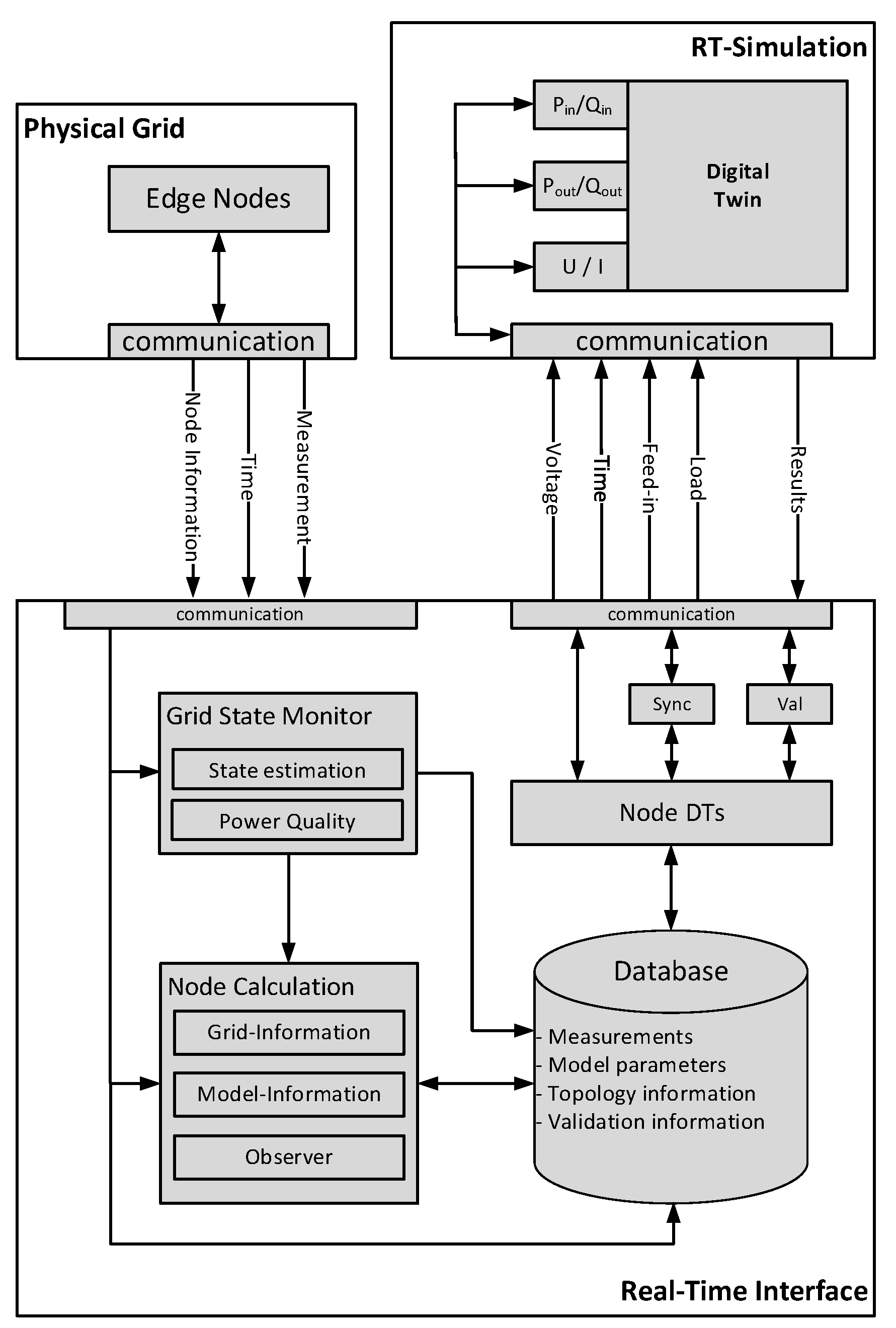
3. Implementation of Key Components of the Real-Time Interface
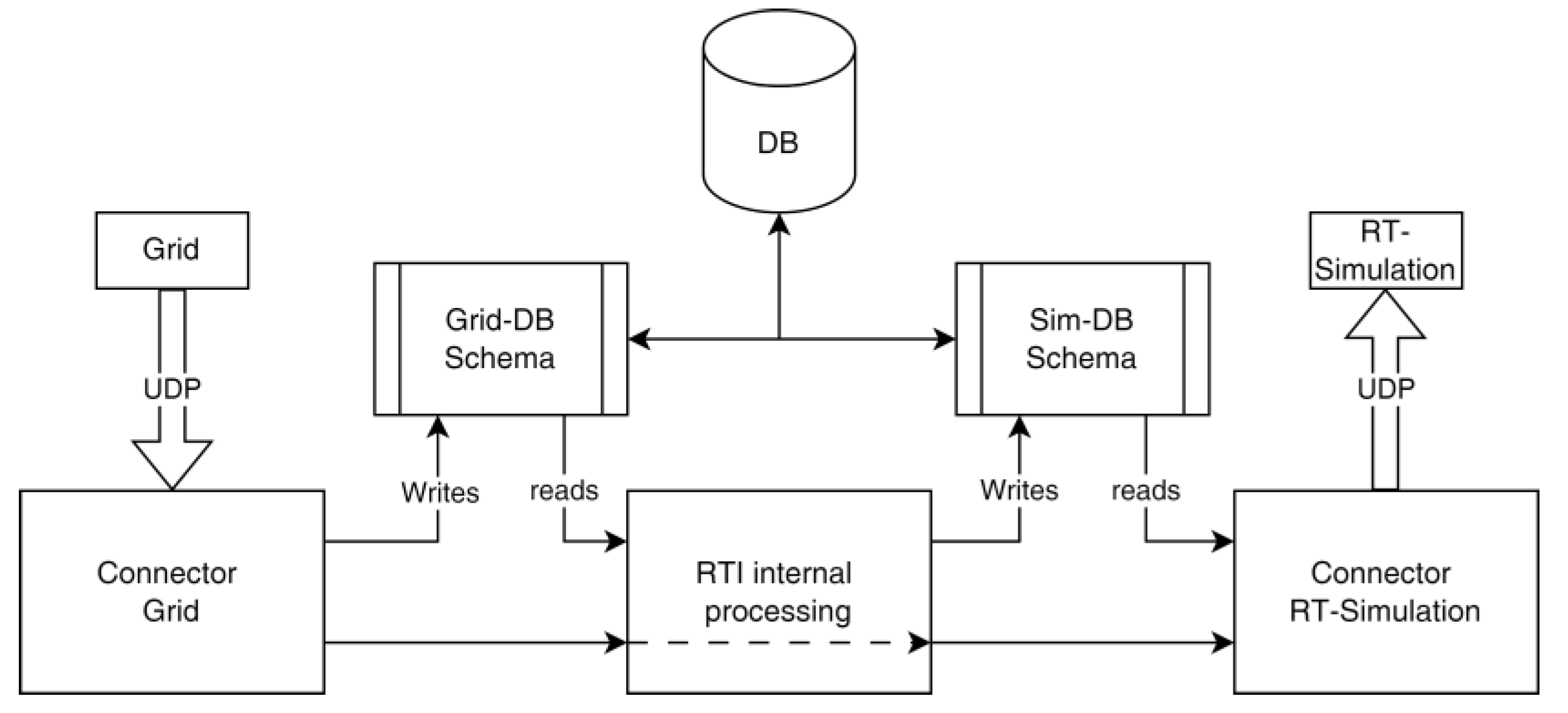
3.1. Communication and Signal Exchange
3.2. Observer-Based Modeling of Grid Nodes
- (1)
- UKF is initialized as follows:
- (2)
- Time update equations are the following:
- (a)
- Computing of sigma points
- (b)
- Obtain priori state estimate and error covariance
- (3)
- Measurement update equations are the following:where is the expected value of .
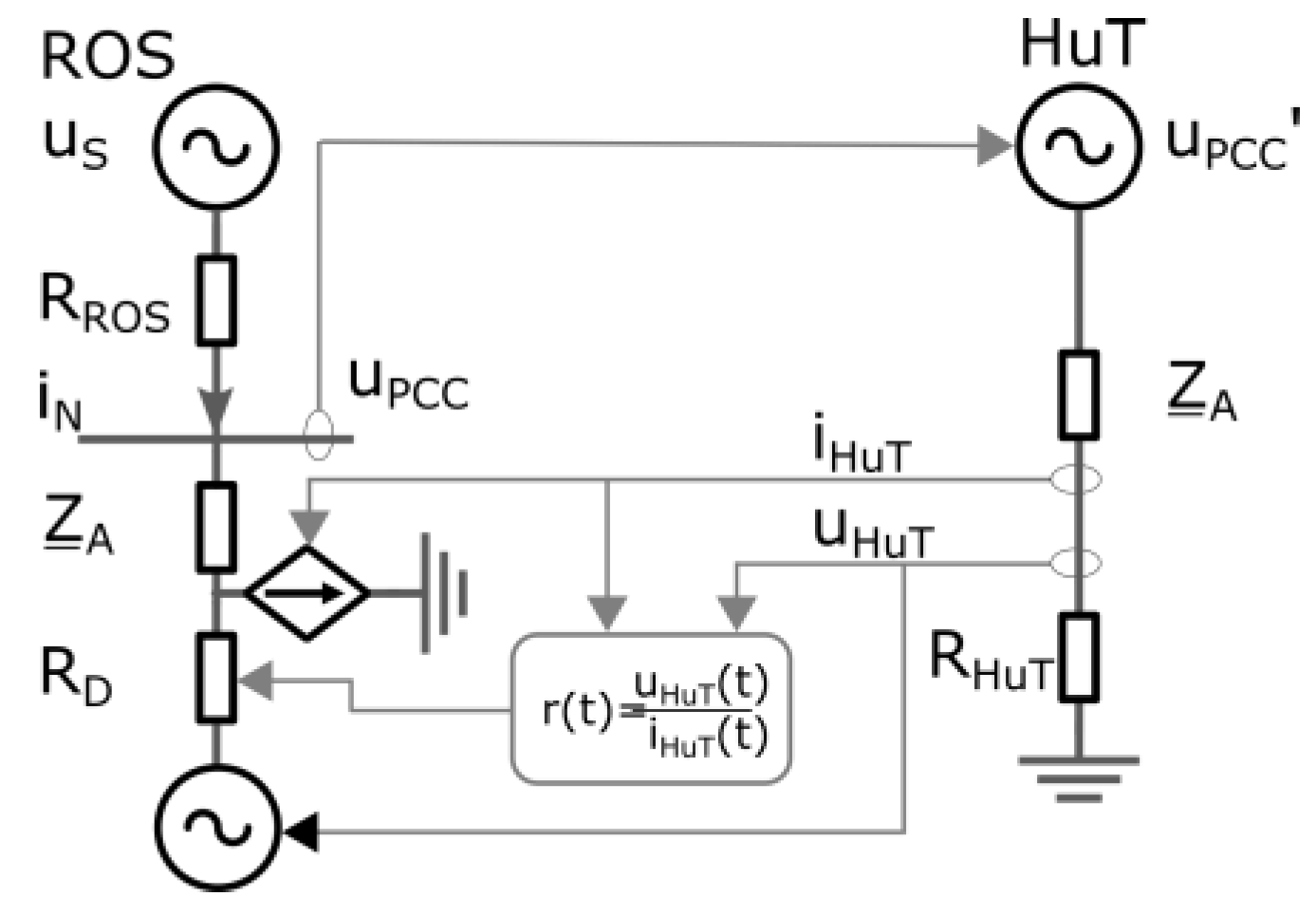
3.3. Hardware-in-the-Loop Real-Time Simulation Configuration
4. RTI Implementation into a Laboratory Test Bench
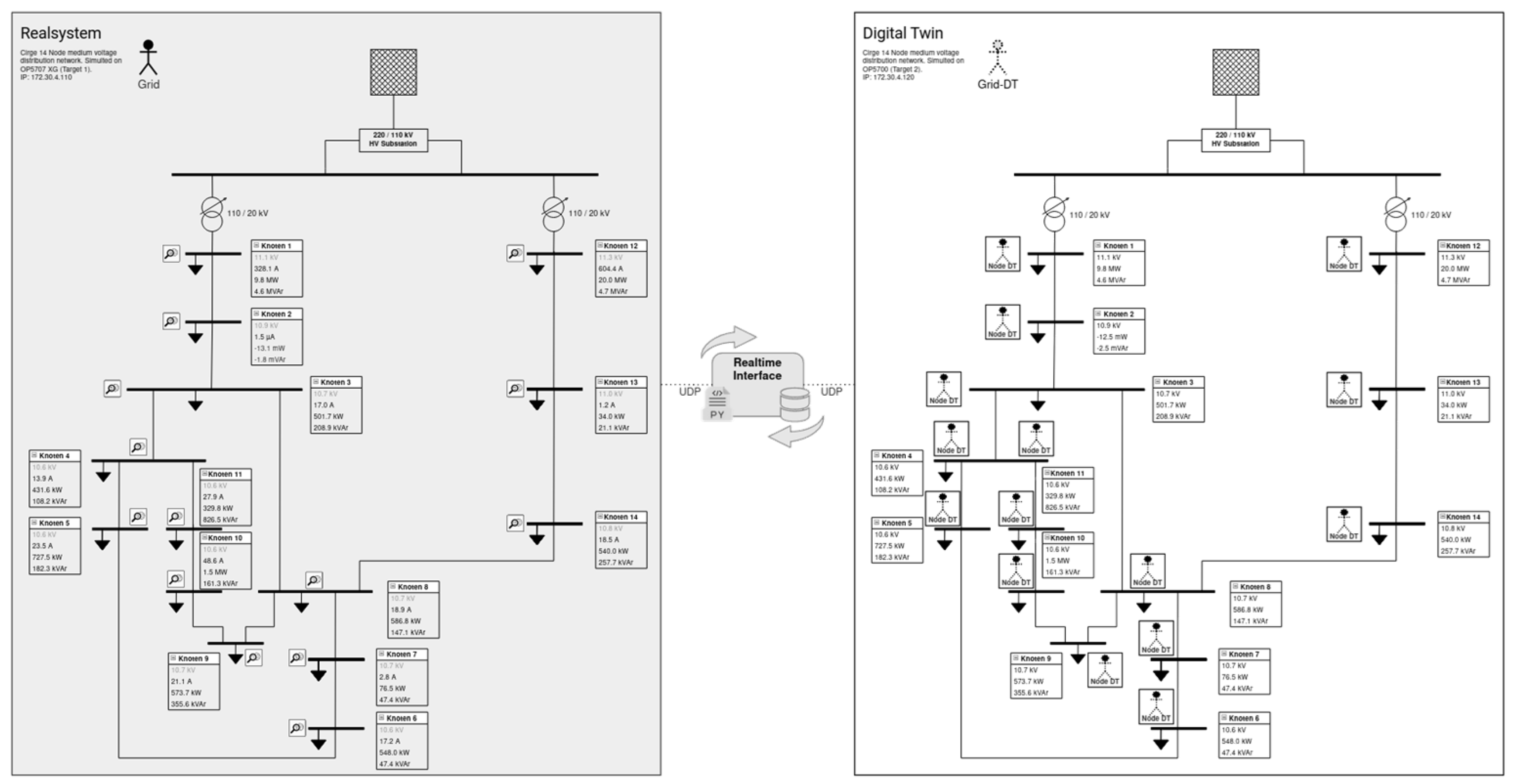
4.1. Simulation Setup
4.2. Grid Scenario and Focus of Investigations
5. Results in Laboratory Setup
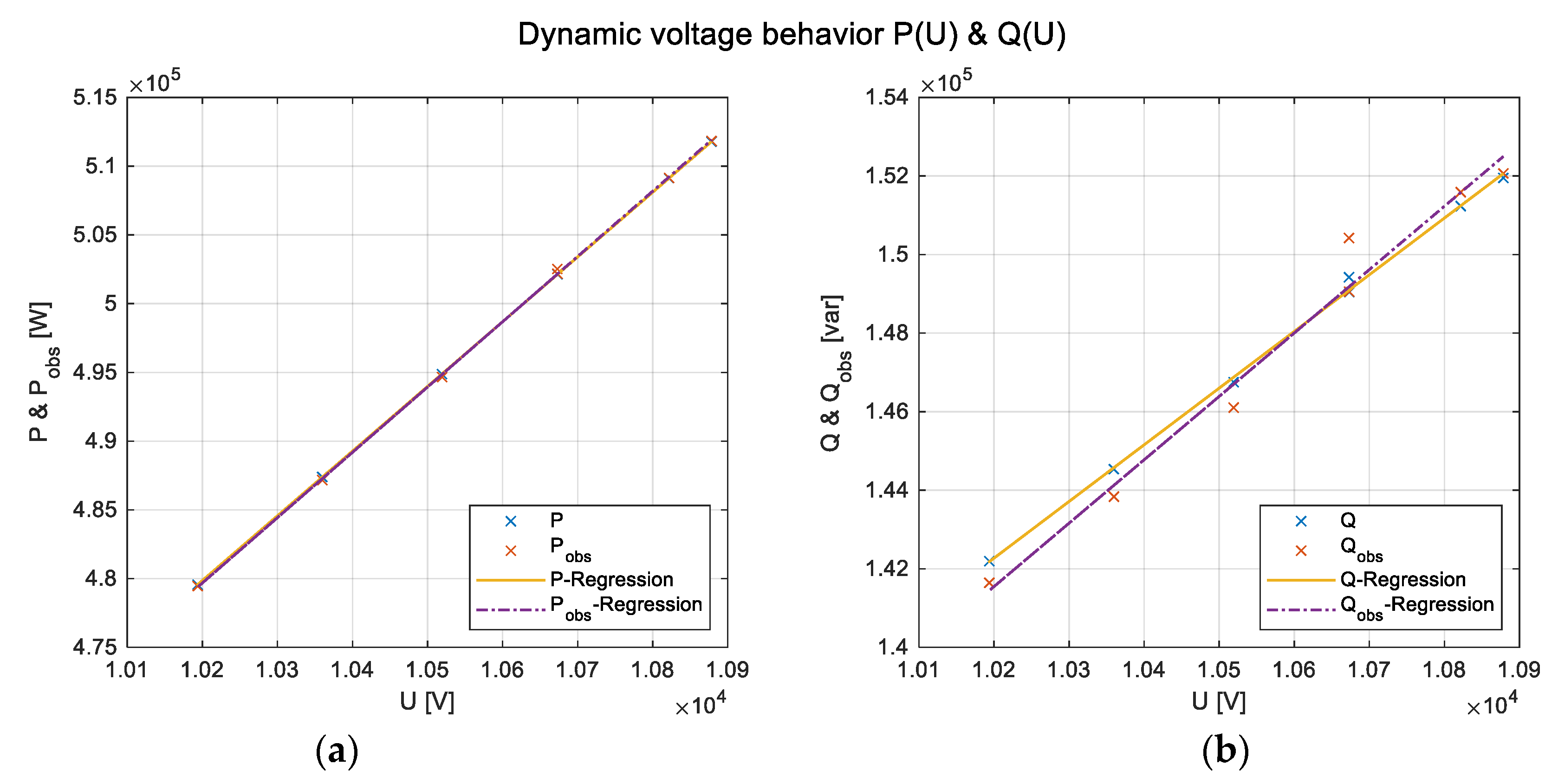
5.1. Results of the DT Grid: Steady-State Conditions
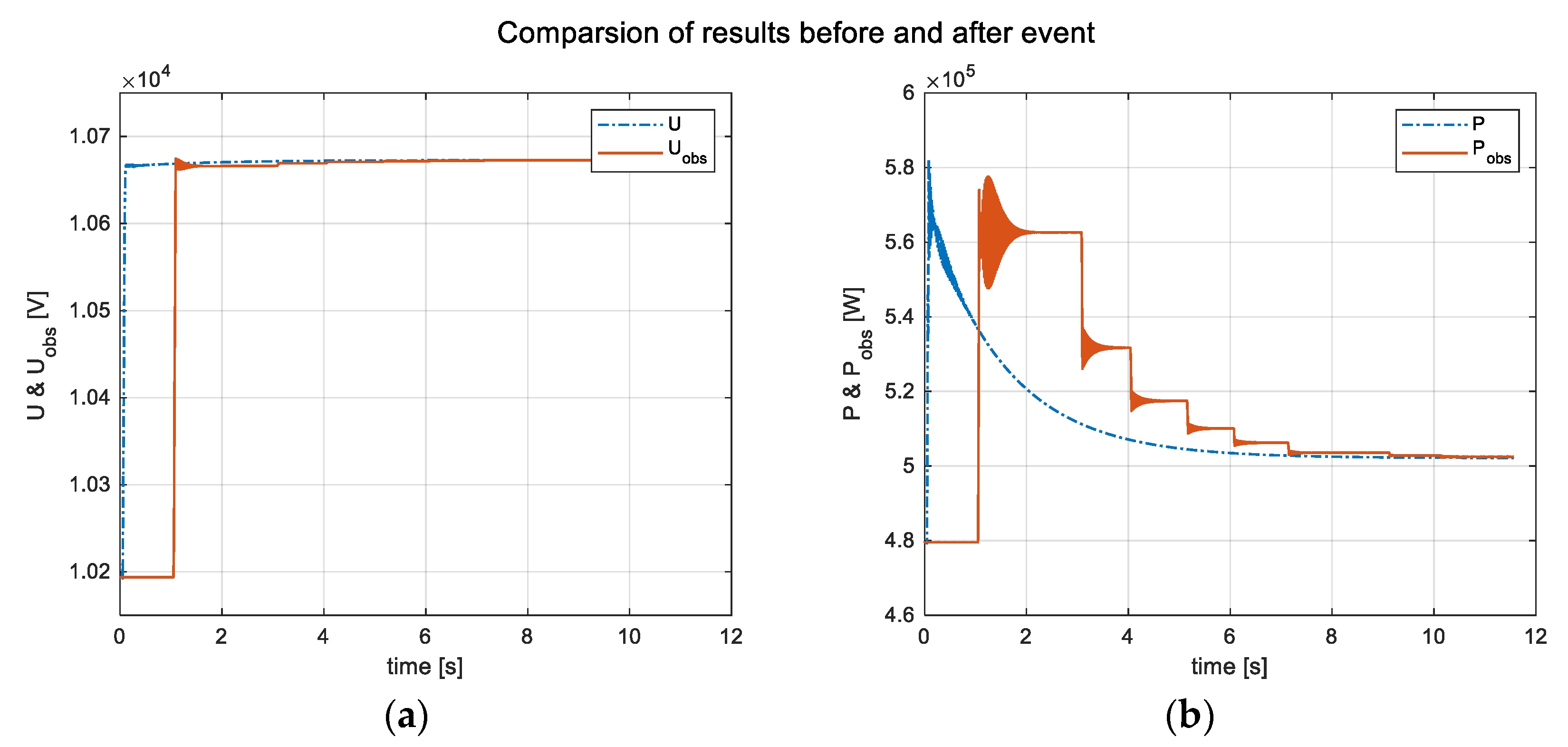
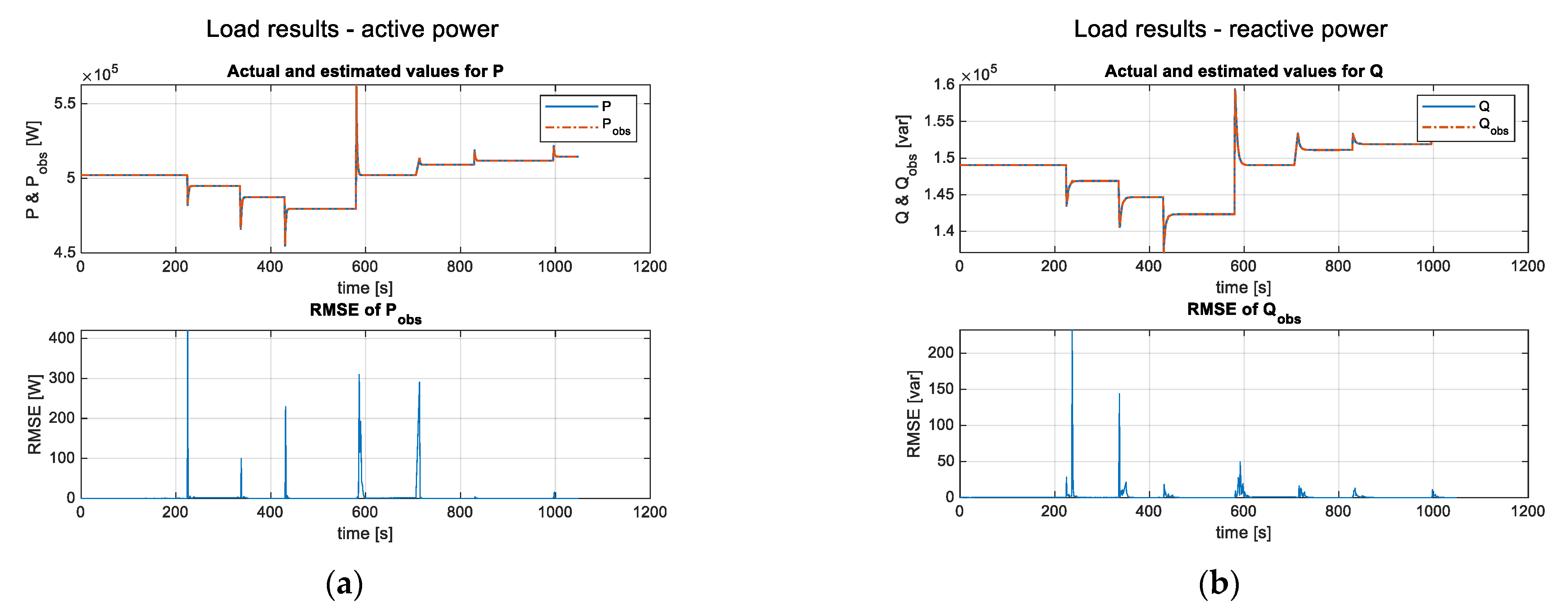
5.2. Results of the DT Grid: Dynamic Behavior
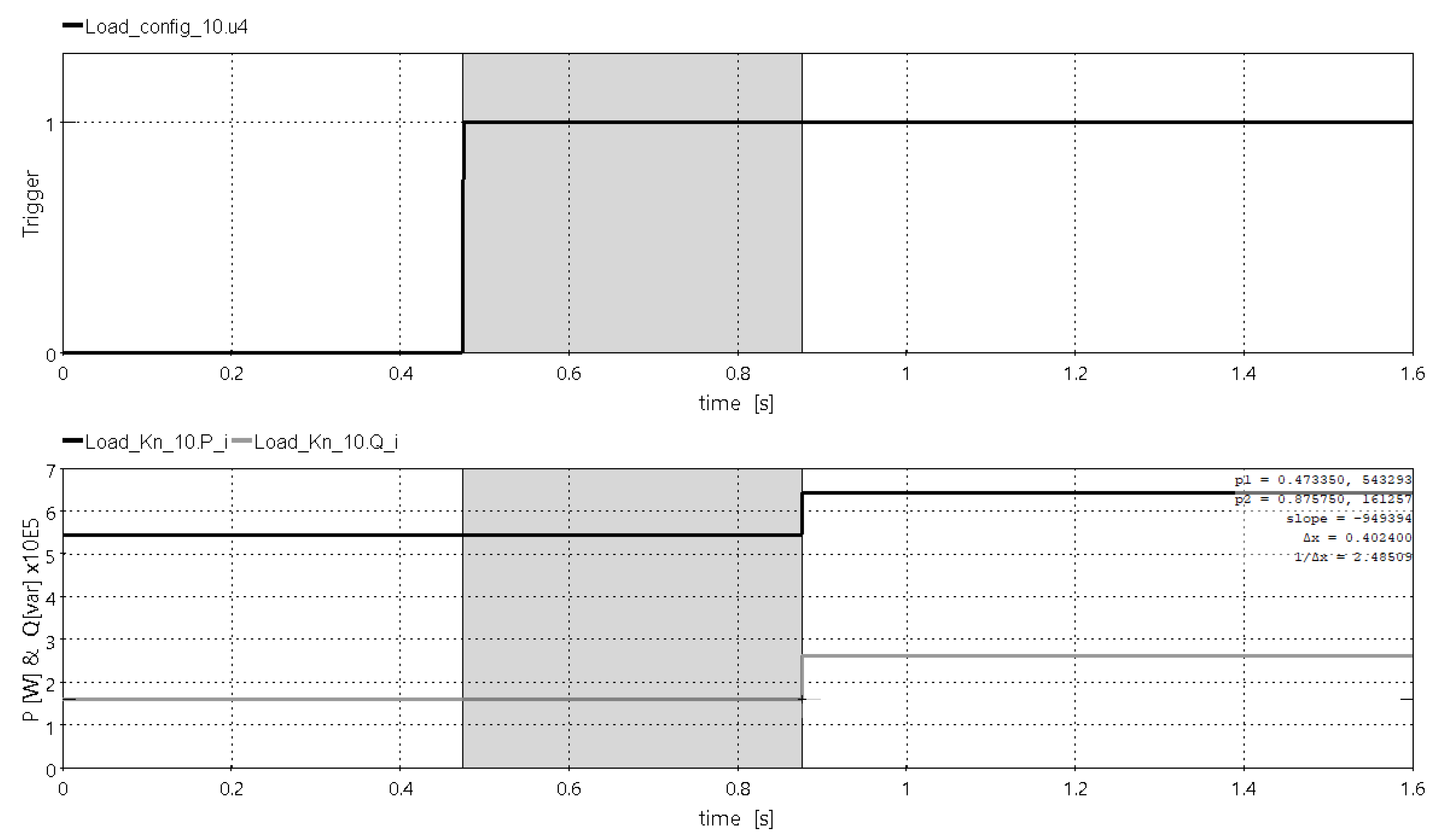
5.3. Time Delays for Communication and Processing Grid Information
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Tuttokmagi, O.; Kaygusuz, A. Smart Grids and Industry 4.0. In Proceedings of the 2018 International Conference on Artificial Intelligence and Data Processing (IDAP), Malatya, Turkey, 28–30 September 2018; pp. 1–6. [Google Scholar]
- IEC 61850:2022; Communication Networks and Systems for Power Utility Automation-ALL PARTS. IEC: London, UK, 2022.
- IEC 60870-5-104:2006+AMD1:2016; Telecontrol Equipment and Systems—Part 5-104: Transmission Protocols—Network Access for IEC 60870-5-101 Using Standardtransport Profiles. IEC: London, UK, 2016.
- Rösch, D.; Kummerow, A.; Ruhe, S.; Schäfer, K.; Monsalve, C.; Nicolai, S. IT-Sicherheit in digitalen Stationen: Cyber-physische Systemmodellierung, -bewertung und -analyse. Automatisierungstechnik 2020, 68, 720–737. [Google Scholar] [CrossRef]
- Rinaldi, S.; Ferrari, P.; Ali, N.M.; Gringoli, F. IEC 61850 for micro grid automation over heterogeneous network: Requirements and real case deployment. In Proceedings of the 2015 IEEE 13th International Conference on Industrial Informatics (INDIN), Cambridge, UK, 22–24 July 2015; pp. 923–930. [Google Scholar]
- Uluski, R.W. The role of Advanced Distribution Automation in the Smart Grid. In Proceedings of the IEEE PES General Meeting, Minneapolis, MN, USA, 25–29 July 2010; pp. 1–5. [Google Scholar]
- Dileep, G. A survey on smart grid technologies and applications. Renew. Energy 2020, 146, 2589–2625. [Google Scholar] [CrossRef]
- Ratnam, K.S.; Palanisamy, K.; Yang, G. Future low-inertia power systems: Requirements, issues, and solutions—A review. Renew. Sustain. Energy Rev. 2020, 124, 109773. [Google Scholar] [CrossRef]
- Ferrari, M.; Orendorff, M.; Smith, T.; Buckner, M.A. Open-Code, Real-Time Emulation Testbed OF Grid-Connected Type-3 Wind Turbine System with Hardware Validation. In Proceedings of the 2019 IEEE Applied Power Electronics Conference and Exposition (APEC), Anaheim, CA, USA, 17–21 March 2019; pp. 66–70. [Google Scholar]
- Hashimoto, J.; Ustun, T.S.; Suzuki, M.; Sugahara, S.; Hasegawa, M.; Otani, K. Advanced Grid Integration Test Platform for Increased Distributed Renewable Energy Penetration in Smart Grids. IEEE Access 2021, 9, 34040–34053. [Google Scholar] [CrossRef]
- Wagle, R.; Tricarico, G.; Sharma, P.; Sharma, C.; Rueda, J.L.; Gonzalez-Lonzatt, F. Cyber-Physical Co-Simulation Testbed for Real-Time Reactive Power Control in Smart Distribution Network. In Proceedings of the 2022 IEEE PES Innovative Smart Grid Technologies—Asia (ISGT Asia), Singapore, 1–5 November 2022; pp. 11–15. [Google Scholar]
- Onile, A.E.; Machlev, R.; Petlenkov, E.; Levron, Y.; Belikov, J. Uses of the digital twins concept for energy services, intelligent recommendation systems, and demand side management: A review. Energy Rep. 2021, 7, 997–1015. [Google Scholar] [CrossRef]
- Rasheed, A.; San, O.; Kvamsdal, T. Digital Twin: Values, Challenges and Enablers From a Modeling Perspective. IEEE Access 2020, 8, 21980–22012. [Google Scholar] [CrossRef]
- Jacoby, M.; Usländer, T. Digital Twin and Internet of Things—Current Standards Landscape. Appl. Sci. 2020, 10, 6519. [Google Scholar] [CrossRef]
- Arrano-Vargas, F.; Konstantinou, G. Modular Design and Real-Time Simulators Toward Power System Digital Twins Implementation. IEEE Trans. Ind. Inf. 2023, 19, 52–61. [Google Scholar] [CrossRef]
- Cioara, T.; Anghel, I.; Antal, M.; Antal, C.; Arcas, G.I.; Croce, V. An Overview of Digital Twins Application in Smart Energy Grids. In Proceedings of the 2022 IEEE 18th International Conference on Intelligent Computer Communication and Processing (ICCP), Cluj-Napoca, Romania, 22–24 September 2022; pp. 25–30. [Google Scholar]
- Bazmohammadi, N.; Madary, A.; Vasquez, J.C.; Mohammadi, H.B.; Khan, B.; Wu, Y.; Guerrero, J.M. Microgrid Digital Twins: Concepts, Applications, and Future Trends. IEEE Access 2022, 10, 2284–2302. [Google Scholar] [CrossRef]
- Brosinsky, C.; Westermann, D.; Krebs, R. Recent and prospective developments in power system control centers: Adapting the digital twin technology for application in power system control centers. In Proceedings of the 2018 IEEE International Energy Conference (ENERGYCON), Limassol, Cyprus, 3–7 June 2018; pp. 1–6. [Google Scholar]
- Ruhe, S.; Nicolai, S.; Bretschneider, P.; Westermann, D. Real-Time Approach of Grid-Parallel Simulation for Automated Distribution Grids. In Proceedings of the 2022 57th International Universities Power Engineering Conference (UPEC), Istanbul, Turkey, 30 August–2 September 2022; pp. 1–6. [Google Scholar]
- Monsalve, C.; Alramlawi, M.; Ruhe, S.; Schaefer, K.; Nicolai, S.; Bretschneider, P. A Novel Framework Architecture for Distributed Digital Twins in Power Systems. In Proceedings of the ETG Congress 2021, Online, 18–19 March 2021; pp. 1–6. [Google Scholar]
- Yang, Y.; Chen, Z.; Yan, J.; Xiong, Z.; Zhang, J.; Yuan, H.; Tu, Y.; Zhang, T. State Evaluation of Power Transformer Based on Digital Twin. In Proceedings of the 2019 IEEE International Conference on Service Operations and Logistics, and Informatics (SOLI), Zhengzhou, China, 6–8 November 2019; pp. 230–235. [Google Scholar]
- Kuber, S.; Sharma, M.; Bonetti, A.; Harispuru, C.; Soroush, A. Virtual Testing of Protection Systems using Digital Twin Technology. In Proceedings of the 2022 75th Annual Conference for Protective Relay Engineers (CPRE), College Station, TX, USA, 25–28 May 2022; pp. 1–8. [Google Scholar]
- Sleiti, A.K.; Kapat, J.S.; Vesely, L. Digital twin in energy industry: Proposed robust digital twin for power plant and other complex capital-intensive large engineering systems. Energy Rep. 2022, 8, 3704–3726. [Google Scholar] [CrossRef]
- Brosinsky, C.; Krebs, R.; Westermann, D. Embedded Digital Twins in future energy management systems: Paving the way for automated grid control. Automatisierungstechnik 2020, 68, 750–764. [Google Scholar] [CrossRef]
- Thomas, M.S.; McDonald, J.D. Power System SCADA and Smart Grids; CRC Press: Boca Raton, FL, USA, 2015. [Google Scholar]
- Huang, Y.-F.; Werner, S.; Huang, J.; Kashyap, N.; Gupta, V. State Estimation in Electric Power Grids: Meeting New Challenges Presented by the Requirements of the Future Grid. IEEE Signal Process. Mag. 2012, 29, 33–43. [Google Scholar] [CrossRef] [Green Version]
- Yang, C.-W.; Dubinin, V.; Vyatkin, V. Automatic Generation of Control Flow from Requirements for Distributed Smart Grid Automation Control. IEEE Trans. Ind. Inf. 2020, 16, 403–413. [Google Scholar] [CrossRef]
- Gungor, V.C.; Sahin, D.; Kocak, T.; Ergut, S.; Buccella, C.; Cecati, C.; Hancke, G.P. A Survey on Smart Grid Potential Applications and Communication Requirements. IEEE Trans. Ind. Inf. 2013, 9, 28–42. [Google Scholar] [CrossRef] [Green Version]
- Ruhe, S.; Nicolai, S.; Jiang, T.; Cai, H.; El Sayed, N.; Geithner, T.; Frueh, N.; Ulbig, A.; Schoenfeld, B.; Prinz, S. Approach of a DT based automatic grid operation for distribution grids. In Proceedings of the ETG Congress 2021, Online, 18–19 March 2021; pp. 1–6. [Google Scholar]
- Faruque, M.O.; Strasser, T.; Lauss, G.; Jalili-Marandi, V.; Forsyth, P.; Dufour, C.; Dinavahi, V.; Monti, A.; Kotsampopoulos, P.; Martinez, J.A.; et al. Real-Time Simulation Technologies for Power Systems Design, Testing, and Analysis. IEEE Power Energy Technol. Syst. J. 2015, 2, 63–73. [Google Scholar] [CrossRef]
- Guillaud, X.; Faruque, M.O.; Teninge, A.; Hariri, A.H.; Vanfretti, L.; Paolone, M.; Dinavahi, V.; Mitra, P.; Lauss, G.; Dufour, C.; et al. Applications of Real-Time Simulation Technologies in Power and Energy Systems. IEEE Power Energy Technol. Syst. J. 2015, 2, 103–115. [Google Scholar] [CrossRef] [Green Version]
- Madhuri, D.; Reddy, P.C. Performance comparison of TCP, UDP and SCTP in a wired network. In Proceedings of the 2016 International Conference on Communication and Electronics Systems (ICCES), Coimbatore, India, 21–22 October 2016; pp. 1–6. [Google Scholar]
- Pasiopoulou, I.D.; Kontis, E.O.; Papadopoulos, T.; Papagiannis, G.K. Effect of load modeling on power system stability studies. Electr. Power Syst. Res. 2022, 207, 107846. [Google Scholar] [CrossRef]
- Arif, A.; Wang, Z.; Wang, J.; Mather, B.; Bashualdo, H.; Zhao, D. Load Modeling—A Review. IEEE Trans. Smart Grid 2018, 9, 5986–5999. [Google Scholar] [CrossRef]
- Karlsson, D.; Hill, D.J. Modelling and identification of nonlinear dynamic loads in power systems. IEEE Trans. Power Syst. 1994, 9, 157–166. [Google Scholar] [CrossRef] [Green Version]
- Wan, E.A.; van der Merwe, R. The unscented Kalman filter for nonlinear estimation. In Proceedings of the IEEE 2000 Adaptive Systems for Signal Processing, Communications, and Control Symposium (Cat. No.00EX373), Lake Louise, AB, Canada, 4 October 2000; pp. 153–158. [Google Scholar]
- Rouhani, A.; Abur, A. Real-Time Dynamic Parameter Estimation for an Exponential Dynamic Load Model. IEEE Trans. Smart Grid 2016, 7, 1530–1536. [Google Scholar] [CrossRef]
- Edrington, C.S.; Steurer, M.; Langston, J.; El-Mezyani, T.; Schoder, K. Role of Power Hardware in the Loop in Modeling and Simulation for Experimentation in Power and Energy Systems. Proc. IEEE 2015, 103, 2401–2409. [Google Scholar] [CrossRef]
- Resch, S.; Friedrich, J.; Wagner, T.; Mehlmann, G.; Luther, M. Stability Analysis of Power Hardware-in-the-Loop Simulations for Grid Applications. Electronics 2022, 11, 7. [Google Scholar] [CrossRef]
- Lentijo, S.; D’Arco, S.; Monti, A. Comparing the Dynamic Performances of Power Hardware-in-the-Loop Interfaces. IEEE Trans. Ind. Electron. 2010, 57, 1195–1207. [Google Scholar] [CrossRef]
- Brandl, R. Operational Range of Several Interface Algorithms for Different Power Hardware-in-the-Loop Setups. Energies 2017, 10, 1946. [Google Scholar] [CrossRef] [Green Version]
- Hatakeyama, T.; Riccobono, A.; Monti, A. Stability and accuracy analysis of power hardware in the loop system with different interface algorithms. In Proceedings of the 2016 IEEE 17th Workshop on Control and Modeling for Power Electronics (COMPEL), Trondheim, Norway, 27–30 June 2016; pp. 1–8. [Google Scholar]
- Ruhe, S.; Fechner, M.; Nicolai, S.; Bretschneider, P. Simulation of Coupled Components within Power-Hardware-in-the-Loop (PHiL) Test Bench. In Proceedings of the 2020 55th International Universities Power Engineering Conference (UPEC), Torino, Italy, 1–4 September 2020; pp. 1–6. [Google Scholar]
- Rudion, K.; Orths, A.; Styczynski, A.; Strunz, K. Design of benchmark of medium voltage distribution network for investigation of DG integration. In Proceedings of the 2006 IEEE Power Engineering Society General Meeting, Montreal, QC, Canada, 18–22 June 2006; p. 6. [Google Scholar]












Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ruhe, S.; Schaefer, K.; Branz, S.; Nicolai, S.; Bretschneider, P.; Westermann, D. Design and Implementation of a Hierarchical Digital Twin for Power Systems Using Real-Time Simulation. Electronics 2023, 12, 2747. https://doi.org/10.3390/electronics12122747
Ruhe S, Schaefer K, Branz S, Nicolai S, Bretschneider P, Westermann D. Design and Implementation of a Hierarchical Digital Twin for Power Systems Using Real-Time Simulation. Electronics. 2023; 12(12):2747. https://doi.org/10.3390/electronics12122747
Chicago/Turabian StyleRuhe, Stephan, Kevin Schaefer, Stefan Branz, Steffen Nicolai, Peter Bretschneider, and Dirk Westermann. 2023. "Design and Implementation of a Hierarchical Digital Twin for Power Systems Using Real-Time Simulation" Electronics 12, no. 12: 2747. https://doi.org/10.3390/electronics12122747