
Identification of Indoor Radio Environment Properties from Channel Impulse Response with Machine Learning Models
 , , , and
, , , and
Abstract
:1. Introduction
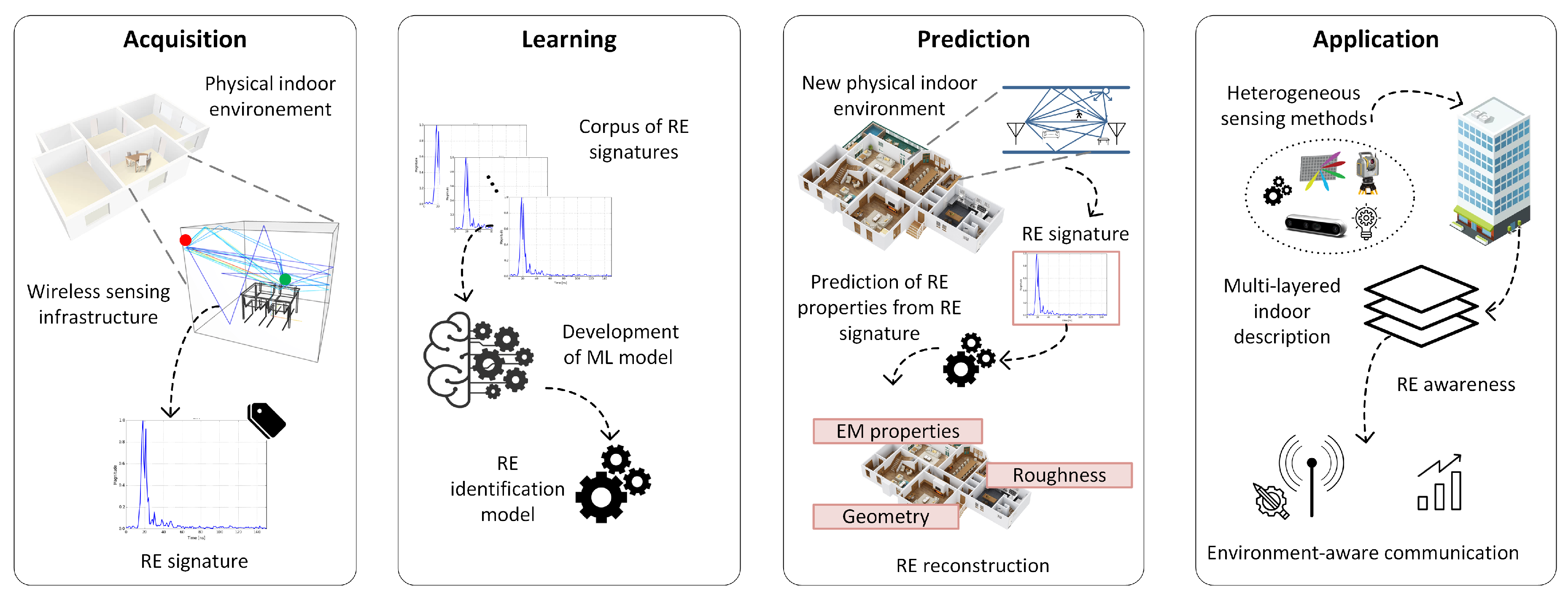
- An extended data-driven methodology for identification of the properties of all surfaces in an indoor propagation environment based on CIR;
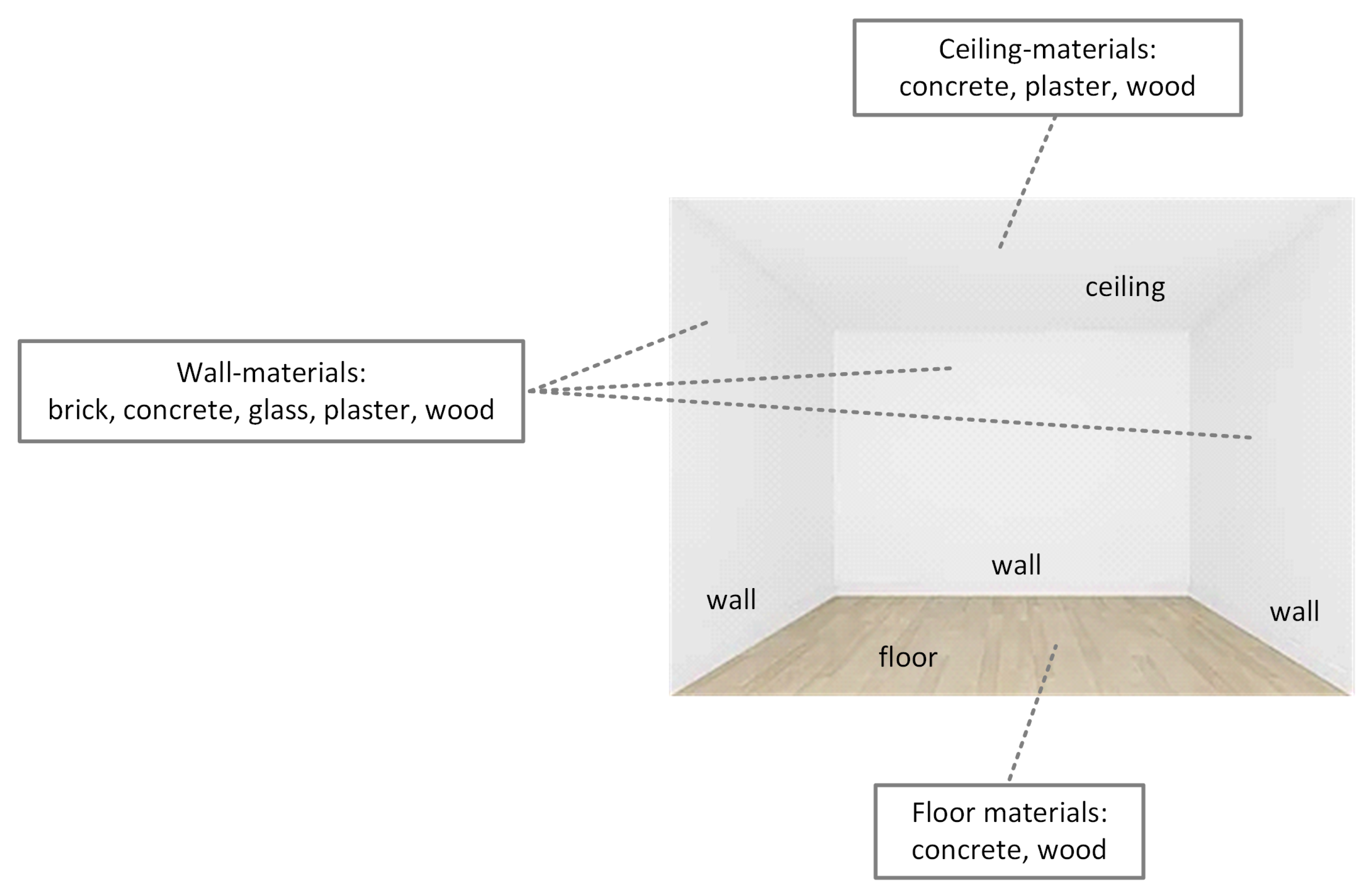
- Validation of the proposed methodology for identification of all the materials used for the surfaces in the room;
- Evaluation of the identification performance of the models in three scenarios and analysis of the impact of the radio nodes’ locations and room sizes considered in the training phase on the model’s applicability;
- Open access data set containing indoor radio propagation data from a large number of rooms annotated with the location of the radio node, the room’s geometry, and the surfaces’ materials.
2. Related Work
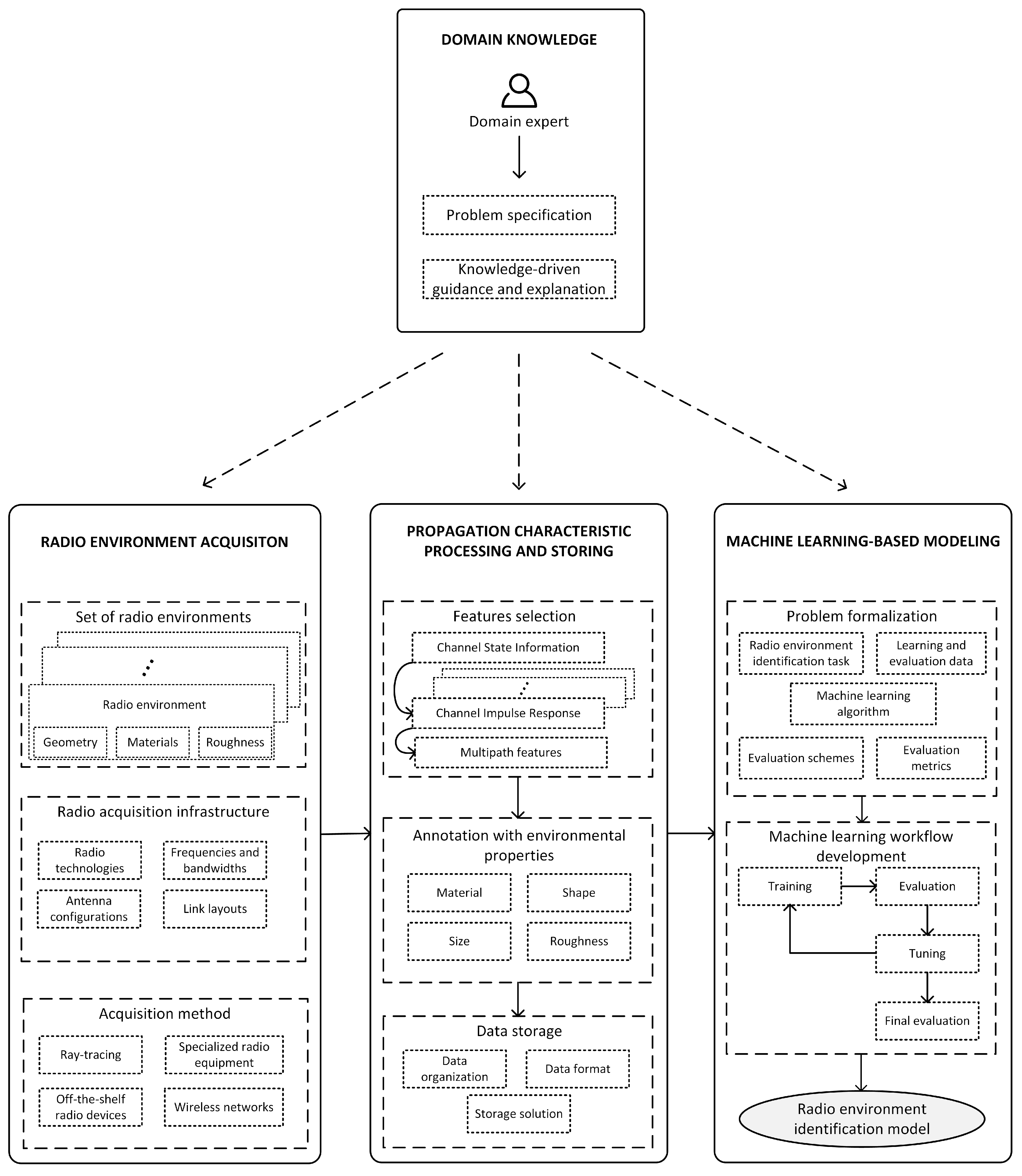
3. Intelligent Indoor Environment Characterization
3.1. Concept
3.2. Data-Driven Methodology
4. Methodology Evaluation Procedure
4.1. Learning Task Formalization
- input space , consisting of tuples of continuous values, where is the input description of the sample i and D is the size of the tuple, i.e., the number of input attributes;
- label space , which is a set of possible discrete labels, where and ;
- training set , where is a multi-labeled training sample and is the number of samples in the training set;
- a quality criterion q, which rewards models with good predictive performance and low complexity.
4.2. Learning Approach
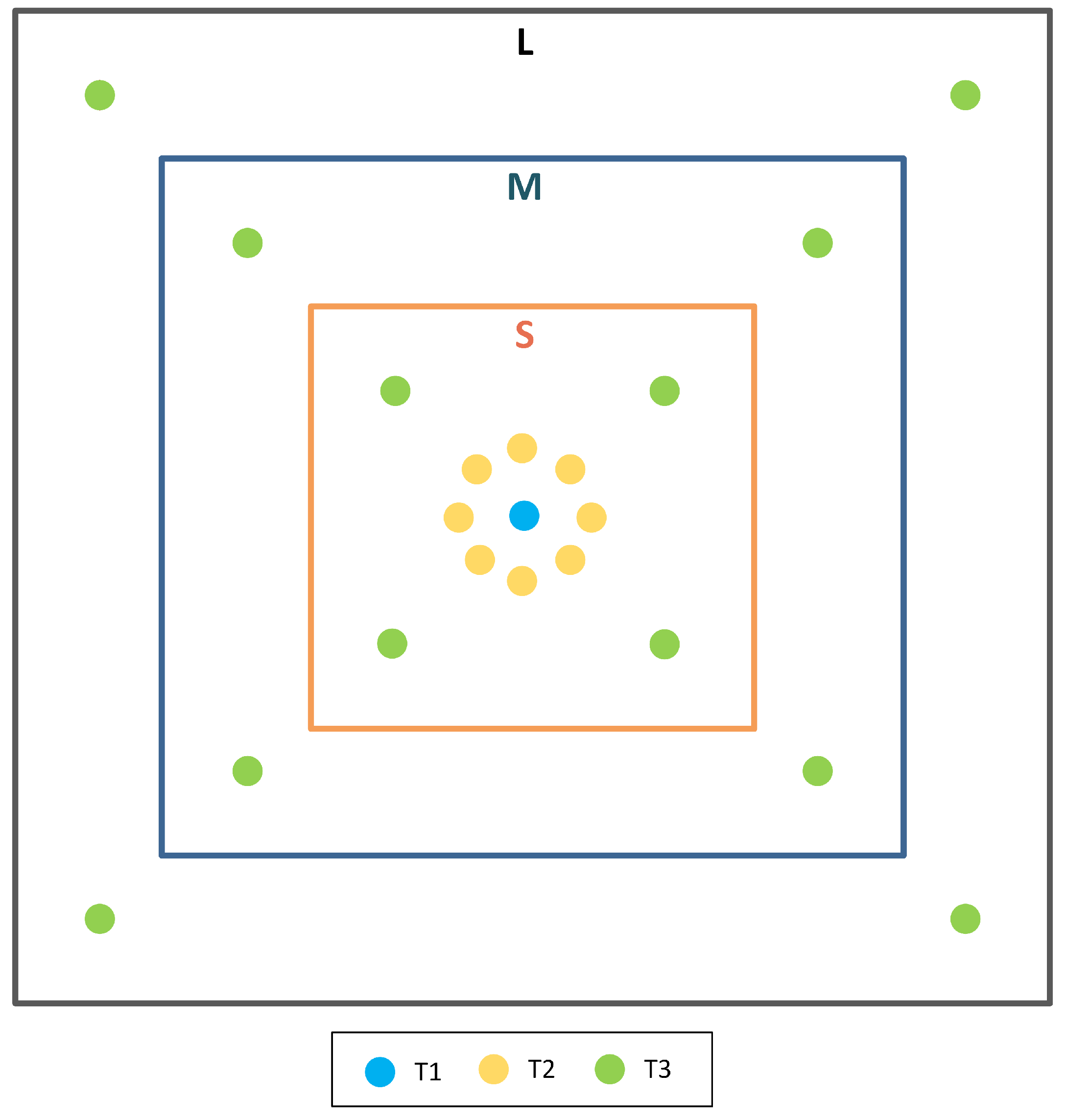
4.3. CIR Acquisition
- Center (T1): a single radio node in the center of the room;
- Circle (T2): eight radio nodes spaced rad apart on a circle with radius 0.5 m;
- Corners (T3): four radio nodes located 0.375 m from the walls, near the corners of the room.
4.4. Evaluation Scenarios
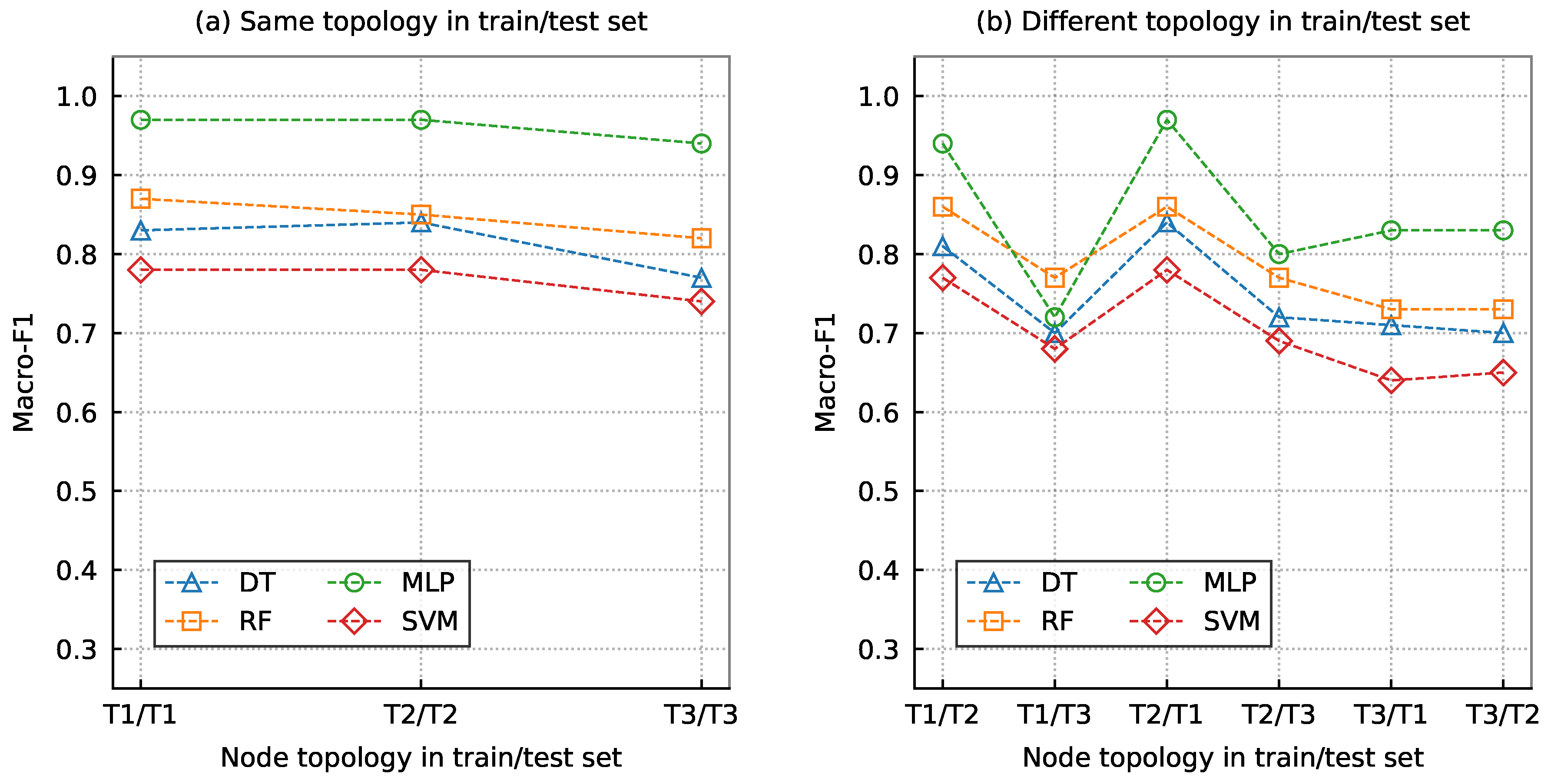
- Scenario Init: Represents the case where the models are applied to CIR data from rooms with sizes considered in the training procedure. The same and different locations of the fixed nodes are used to estimate the CIRs for training and testing;
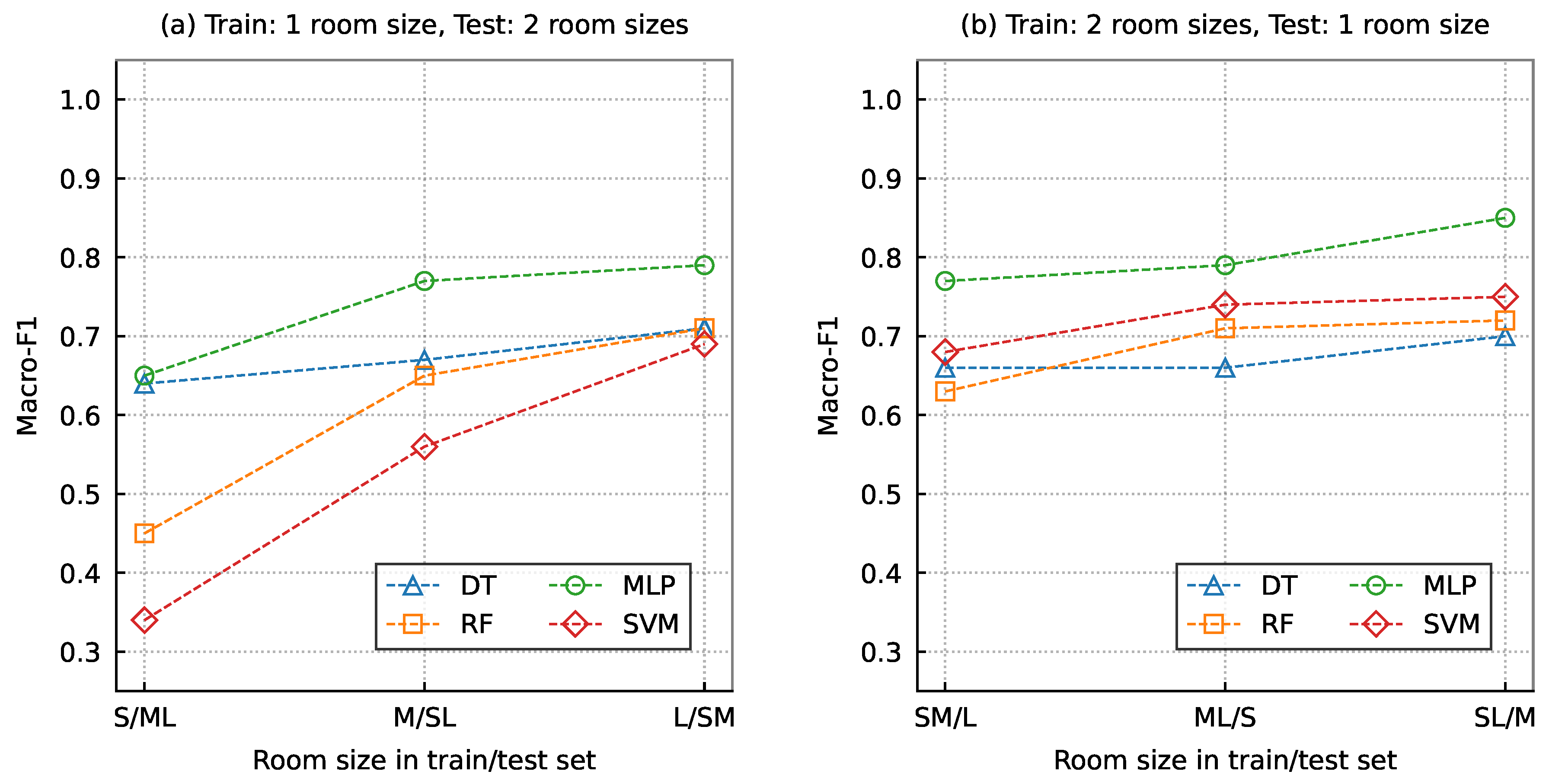
- Scenario Diff-RS: Represents the case where the models are applied to CIR data from rooms with sizes that were not considered in the training procedure. The same locations of the fixed nodes that were used for estimating the CIRs for training are used for testing;
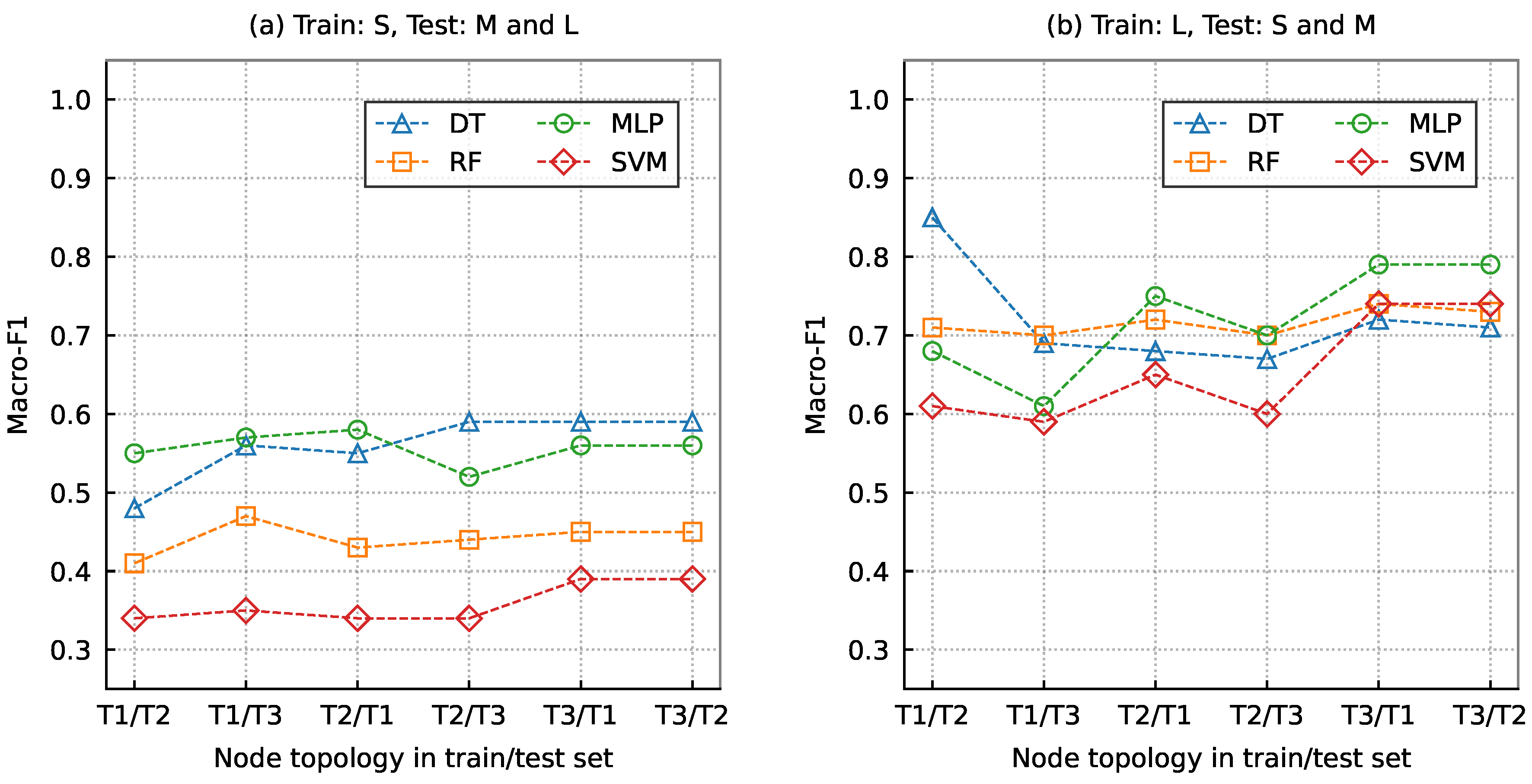
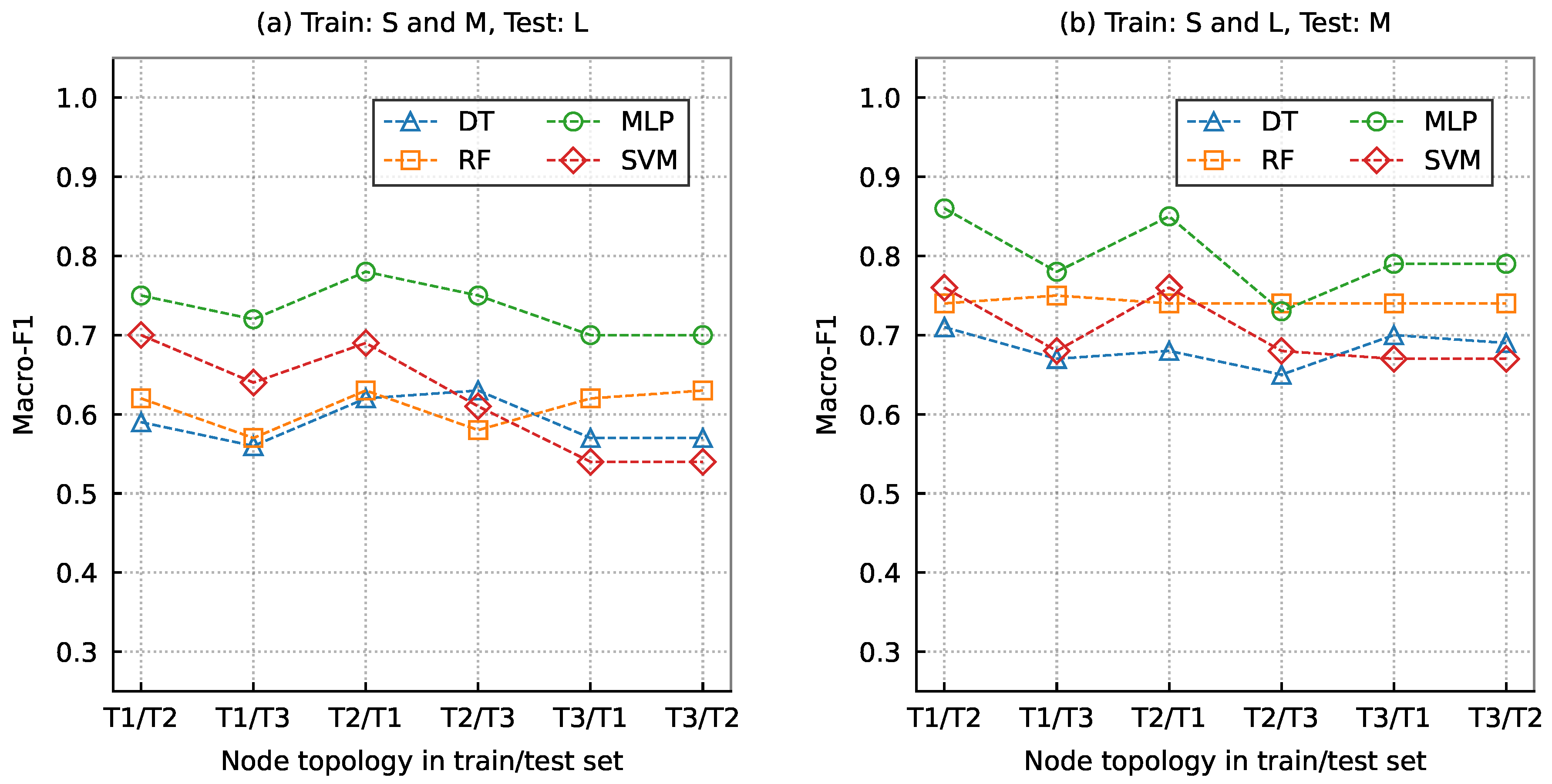
- Scenario Diff-RS-Lyt: Represents the case where the models are applied to CIR data from different radio links in rooms with sizes that were not considered in the training procedure. Different locations of the fixed nodes are used for estimating the CIRs for training and testing.
5. Results and Discussion
6. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
- The following abbreviations are used in this manuscript:
All Center+Circle+Corners All/All Train: Center+Circle+Corners, test: Center+Circle+Corners CIR Channel impulse response CSV Comma-separated-values DT Decision tree FN False negatives FP False positives L Large LoS Line-of-sight L/SM Train: large, test: small+medium L1-test Links with a fixed node in topology Center for testing L1-train Links with a fixed node in topology Center for training L2-test Links with a fixed node in topology Circle for testing L2-train Links with a fixed node in topology Circle for training L3-test Links with fixed nodes in topology Corners for testing L3-train Links with fixed nodes in topology Corners for training M Medium M/SL Train: medium, test: small+large ML Medium+large ML/S Train: medium+large, test: small MLC Multi-label classification MLP Multilayer perceptron MPC Multipath component NLoS Non-line-of-sight RF Random forest RGB Red–green–blue S Small S/ML Train: small, test: medium+large SL Small+large SL/M Train: small+large, test: medium SLAM Simultaneous localization and mapping SM Small+medium SM/L Train: small+medium, test: large SML/SML Train: small+medium+large, test: small+medium+large SVM Support vector machine T1 Fixed-node topology Center T1/T1 Train: Center, test: Center T1/T2 Train: Center, test: Circle T1/T3 Train: Center, test: Corners T2 Fixed-node topology Circle T2/T1 Train: Circle, test: Center T2/T2 Train: Circle, test: Circle T2/T3 Train: Circle, test: Corners T3 Fixed-node topology Corners T3/T1 Train: Corners, test: Center T3/T2 Train: Corners, test: Circle T3/T3 Train: Corners, test: Corners TN True negatives TP True positives UWB Ultra-wideband
References
- Saad, W.; Bennis, M.; Chen, M. A Vision of 6G Wireless Systems: Applications, Trends, Technologies, and Open Research Problems. IEEE Netw. 2020, 34, 134–142. [Google Scholar] [CrossRef] [Green Version]
- Zeng, Y.; Xu, X. Toward Environment-Aware 6G Communications via Channel Knowledge Map. IEEE Wirel. Commun. 2021, 28, 84–91. [Google Scholar] [CrossRef]
- Deren, L.; Wenbo, Y.; Zhenfeng, S. Smart city based on digital twins. Comput. Urban Sci. 2021, 1, 1–11. [Google Scholar] [CrossRef]
- Jiang, W.; Han, B.; Habibi, M.A.; Schotten, H.D. The Road Towards 6G: A Comprehensive Survey. IEEE Open J. Commun. Soc. 2021, 2, 334–366. [Google Scholar] [CrossRef]
- El-Sheimy, N.; Li, Y. Indoor navigation: State of the art and future trends. Satell. Navig. 2021, 2, 1–23. [Google Scholar] [CrossRef]
- Gu, F.; Hu, X.; Ramezani, M.; Acharya, D.; Khoshelham, K.; Valaee, S.; Shang, J. Indoor Localization Improved by Spatial Context—A Survey. ACM Comput. Surv. 2019, 52, 1–35. [Google Scholar] [CrossRef] [Green Version]
- Tseng, P.Y.; Lin, J.J.; Chan, Y.C.; Chen, A.Y. Real-time indoor localization with visual SLAM for in-building emergency response. Autom. Constr. 2022, 140, 104319. [Google Scholar] [CrossRef]
- Vijayan, D.; Rose, A.L.; Arvindan, S.; Revathy, J.; Amuthadevi, C. Automation systems in smart buildings: A review. J. Ambient. Intell. Humaniz. Comput. 2020, 1–13. [Google Scholar] [CrossRef]
- Pintore, G.; Mura, C.; Ganovelli, F.; Fuentes-Perez, L.; Pajarola, R.; Gobbetti, E. State-of-the-art in Automatic 3D Reconstruction of Structured Indoor Environments. Comput. Graph. Forum 2020, 39, 667–699. [Google Scholar] [CrossRef]
- Huang, C.; He, R.; Ai, B.; Molisch, A.F.; Lau, B.K.; Haneda, K.; Liu, B.; Wang, C.X.; Yang, M.; Oestges, C.; et al. Artificial Intelligence Enabled Radio Propagation for Communications—Part II: Scenario Identification and Channel Modeling. IEEE Trans. Antennas Propag. 2022, 70, 3955–3969. [Google Scholar] [CrossRef]
- Sun, Y.; Peng, M.; Zhou, Y.; Huang, Y.; Mao, S. Application of Machine Learning in Wireless Networks: Key Techniques and Open Issues. IEEE Commun. Surv. Tutor. 2019, 21, 3072–3108. [Google Scholar] [CrossRef] [Green Version]
- Liu, F.; Cui, Y.; Masouros, C.; Xu, J.; Han, T.X.; Eldar, Y.C.; Buzzi, S. Integrated Sensing and Communications: Toward Dual-Functional Wireless Networks for 6G and Beyond. IEEE J. Sel. Areas Commun. 2022, 40, 1728–1767. [Google Scholar] [CrossRef]
- Nie, G.; Zhang, J.; Zhang, Y.; Yu, L.; Zhang, Z.; Sun, Y.; Tian, L.; Wang, Q.; Xia, L. A predictive 6G network with environment sensing enhancement: From radio wave propagation perspective. China Commun. 2022, 19, 105–122. [Google Scholar] [CrossRef]
- Zhang, J.; Liu, L.; Fan, Y.; Zhuang, L.; Zhou, T.; Piao, Z. Wireless Channel Propagation Scenarios Identification: A Perspective of Machine Learning. IEEE Access 2020, 8, 47797–47806. [Google Scholar] [CrossRef]
- Seretis, A.; Sarris, C.D. An Overview of Machine Learning Techniques for Radiowave Propagation Modeling. IEEE Trans. Antennas Propag. 2022, 70, 3970–3985. [Google Scholar] [CrossRef]
- Sarker, I.H. Machine learning: Algorithms, real-world applications and research directions. SN Comput. Sci. 2021, 2, 160. [Google Scholar] [CrossRef] [PubMed]
- Gündüz, D.; de Kerret, P.; Sidiropoulos, N.D.; Gesbert, D.; Murthy, C.R.; van der Schaar, M. Machine Learning in the Air. IEEE J. Sel. Areas Commun. 2019, 37, 2184–2199. [Google Scholar] [CrossRef] [Green Version]
- Hrovat, A.; Guam, K.; Kocevska, T.; Javornik, T. 3D Indoor Environment Charactirazation based on Radio Scanning: Initial Idea and Methodolgy. In Proceedings of the 2019 23rd International Conference on Applied Electromagnetics and Communications (ICECOM2019), Dubrovnik, Croatia, 30 September–2 October 2019; pp. 1–6. [Google Scholar]
- Kocevska, T.; Javornik, T.; Švigelj, A.; Hrovat, A. Framework for the Machine Learning Based Wireless Sensing of the Electromagnetic Properties of Indoor Materials. Electronics 2021, 10, 2843. [Google Scholar] [CrossRef]
- Kocevska, T.; Javornik, T.; Švigelj, A.; Guan, K.; Rashkovska, A.; Hrovat, A. Comparison of Machine Learning Models for Predicting Indoor Materials from Channel Impulse Response. In Proceedings of the 2022 International Conference on Software, Telecommunications and Computer Networks (SoftCOM2022), Split, Croatia, 22–24 September 2022; pp. 1–6. [Google Scholar]
- AlHajri, M.I.; Ali, N.T.; Shubair, R.M. A Machine Learning Approach for the Classification of Indoor Environments Using RF Signatures. In Proceedings of the 2018 IEEE Global Conference on Signal and Information Processing (GlobalSIP2018), Anaheim, CA, USA, 26–29 November 2018; pp. 1060–1062. [Google Scholar]
- AlHajri, M.I.; Ali, N.T.; Shubair, R.M. Classification of Indoor Environments for IoT Applications: A Machine Learning Approach. IEEE Antennas Wirel. Propag. Lett. 2018, 17, 2164–2168. [Google Scholar] [CrossRef]
- Kaatze, U. Measuring the dielectric properties of materials. Ninety-year development from low-frequency techniques to broadband spectroscopy and high-frequency imaging. Meas. Sci. Technol. 2012, 24, 012005. [Google Scholar] [CrossRef]
- Landron, O.; Feuerstein, M.; Rappaport, T. In situ microwave reflection coefficient measurements for smooth and rough exterior wall surfaces. In Proceedings of the IEEE 43rd Vehicular Technology Conference, Secaucus, NJ, USA, 18–20 May 1993; pp. 77–80. [Google Scholar]
- Ahmadi-Shokouh, J.; Noghanian, S.; Keshavarz, H. Reflection Coefficient Measurement for North American House Flooring at 57–64 GHz. IEEE Antennas Wirel. Propag. Lett. 2011, 10, 1321–1324. [Google Scholar] [CrossRef]
- Lu, J.; Steinbach, D.; Cabrol, P.; Pietraski, P.; Pragada, R.V. Propagation characterization of an office building in the 60 GHz band. In Proceedings of the The 8th European Conference on Antennas and Propagation (EuCAP2014), The Hague, The Netherlands, 6–11 April 2014; pp. 809–813. [Google Scholar]
- Virk, U.T.; Nguyen, S.L.H.; Haneda, K.; Wagen, J.F. On-Site Permittivity Estimation at 60 GHz Through Reflecting Surface Identification in the Point Cloud. IEEE Trans. Antennas Propag. 2018, 66, 3599–3609. [Google Scholar] [CrossRef] [Green Version]
- Long, Y.; Zeng, Y.; Xu, X.; Huang, Y. Environment-Aware Wireless Localization Enabled by Channel Knowledge Map. In Proceedings of the GLOBECOM 2022—2022 IEEE Global Communications Conference, Rio de Janeiro, Brazil, 4–8 December 2022; pp. 5354–5359. [Google Scholar]
- Li, K.; Li, P.; Zeng, Y.; Xu, J. Channel Knowledge Map for Environment-Aware Communications: EM Algorithm for Map Construction. In Proceedings of the 2022 IEEE Wireless Communications and Networking Conference (WCNC), Austin, TX, USA, 10–13 April 2022; pp. 1659–1664. [Google Scholar]
- Wu, D.; Zeng, Y.; Jin, S.; Zhang, R. Environment-Aware and Training-Free Beam Alignment for mmWave Massive MIMO via Channel Knowledge Map. In Proceedings of the 2021 IEEE International Conference on Communications Workshops (ICC Workshops), Montreal, QC, Canada, 14–23 June 2021; pp. 1–7. [Google Scholar]
- Liu, M.; Fang, S.; Dong, H.; Xu, C. Review of digital twin about concepts, technologies, and industrial applications. J. Manuf. Syst. 2021, 58, 346–361. [Google Scholar] [CrossRef]
- Mylonas, G.; Kalogeras, A.; Kalogeras, G.; Anagnostopoulos, C.; Alexakos, C.; Muñoz, L. Digital Twins From Smart Manufacturing to Smart Cities: A Survey. IEEE Access 2021, 9, 143222–143249. [Google Scholar] [CrossRef]
- Dembski, F.; Wössner, U.; Letzgus, M.; Ruddat, M.; Yamu, C. Urban Digital Twins for Smart Cities and Citizens: The Case Study of Herrenberg, Germany. Sustainability 2020, 12, 2307. [Google Scholar] [CrossRef] [Green Version]
- Zlatanova, S.; Sithole, G.; Nakagawa, M.; Zhu, Q. Problems In Indoor Mapping and Modelling. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, XL-4/W4, 63–68. [Google Scholar] [CrossRef] [Green Version]
- Chen, J.; Clarke, K.C. Indoor cartography. Cartogr. Geogr. Inf. Sci. 2020, 47, 95–109. [Google Scholar] [CrossRef]
- Nossum, A.S. Developing a framework for describing and comparing indoor maps. Cartogr. J. 2013, 50, 218–224. [Google Scholar] [CrossRef]
- Hong, S.; Jung, J.; Kim, S.; Cho, H.; Lee, J.; Heo, J. Semi-automated approach to indoor mapping for 3D as-built building information modeling. Comput. Environ. Urban Syst. 2015, 51, 34–46. [Google Scholar] [CrossRef]
- Lehtola, V.V.; Kaartinen, H.; Nüchter, A.; Kaijaluoto, R.; Kukko, A.; Litkey, P.; Honkavaara, E.; Rosnell, T.; Vaaja, M.T.; Virtanen, J.P.; et al. Comparison of the selected state-of-the-art 3D indoor scanning and point cloud generation methods. Remote Sens. 2017, 9, 796. [Google Scholar] [CrossRef] [Green Version]
- Thomson, C.; Boehm, J. Automatic geometry generation from point clouds for BIM. Remote Sens. 2015, 7, 11753–11775. [Google Scholar] [CrossRef] [Green Version]
- Hübner, P.; Weinmann, M.; Wursthorn, S.; Hinz, S. Automatic voxel-based 3D indoor reconstruction and room partitioning from triangle meshes. ISPRS J. Photogramm. Remote Sens. 2021, 181, 254–278. [Google Scholar] [CrossRef]
- Li, M.; Nan, L. Feature-preserving 3D mesh simplification for urban buildings. ISPRS J. Photogramm. Remote Sens. 2021, 173, 135–150. [Google Scholar] [CrossRef]
- Wang, K.; Lin, Y.A.; Weissmann, B.; Savva, M.; Chang, A.X.; Ritchie, D. Planit: Planning and instantiating indoor scenes with relation graph and spatial prior networks. ACM Trans. Graph. (TOG) 2019, 38, 1–15. [Google Scholar] [CrossRef]
- Kang, Z.; Yang, J.; Yang, Z.; Cheng, S. A review of techniques for 3D reconstruction of indoor environments. ISPRS Int. J. Geo-Inf. 2020, 9, 330. [Google Scholar] [CrossRef]
- Filipenko, M.; Afanasyev, I. Comparison of various SLAM systems for mobile robot in an indoor environment. In Proceedings of the 2018 International Conference on Intelligent Systems (IS), Funchal, Portugal, 25–27 September 2018; pp. 400–407. [Google Scholar]
- Cadena, C.; Carlone, L.; Carrillo, H.; Latif, Y.; Scaramuzza, D.; Neira, J.; Reid, I.; Leonard, J.J. Past, Present, and Future of Simultaneous Localization and Mapping: Toward the Robust-Perception Age. IEEE Trans. Robot. 2016, 32, 1309–1332. [Google Scholar] [CrossRef] [Green Version]
- Khoshelham, K.; Zlatanova, S. Sensors for indoor mapping and navigation. Sensors 2016, 16, 655. [Google Scholar] [CrossRef] [Green Version]
- Masiero, A.; Fissore, F.; Guarnieri, A.; Pirotti, F.; Visintini, D.; Vettore, A. Performance evaluation of two indoor mapping systems: Low-cost UWB-aided photogrammetry and backpack laser scanning. Appl. Sci. 2018, 8, 416. [Google Scholar] [CrossRef] [Green Version]
- Cui, Y.; Li, Q.; Yang, B.; Xiao, W.; Chen, C.; Dong, Z. Automatic 3-D reconstruction of indoor environment with mobile laser scanning point clouds. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 3117–3130. [Google Scholar] [CrossRef] [Green Version]
- Kolhatkar, C.; Wagle, K. Review of SLAM Algorithms for Indoor Mobile Robot with LIDAR and RGB-D Camera Technology. In Proceedings of the Innovations in Electrical and Electronic Engineering; Favorskaya, M.N., Mekhilef, S., Pandey, R.K., Singh, N., Eds.; Springer: Singapore, 2021; pp. 397–409. [Google Scholar]
- Guidi, F.; Guerra, A.; Dardari, D. Personal Mobile Radars with Millimeter-Wave Massive Arrays for Indoor Mapping. IEEE Trans. Mob. Comput. 2016, 15, 1471–1484. [Google Scholar] [CrossRef]
- Guerra, A.; Guidi, F.; Clemente, A.; D’Errico, R.; Dussopt, L.; Dardari, D. Application of transmitarray antennas for indoor mapping at millimeter-waves. In Proceedings of the 2015 European Conference on Networks and Communications (EuCNC2015), Paris, France, 29 June–2 July 2015; pp. 77–81. [Google Scholar]
- Dogru, S.; Marques, L. Grid Based Indoor Mapping Using Radar. In Proceedings of the 2019 Third IEEE International Conference on Robotic Computing (IRC2019), Naples, Italy, 25–27 February 2019; pp. 451–452. [Google Scholar]
- Chen, W.; Shang, G.; Ji, A.; Zhou, C.; Wang, X.; Xu, C.; Li, Z.; Hu, K. An overview on visual SLAM: From tradition to semantic. Remote Sens. 2022, 14, 3010. [Google Scholar] [CrossRef]
- Li, Y.; Li, W.; Tang, S.; Darwish, W.; Hu, Y.; Chen, W. Automatic Indoor as-Built Building Information Models Generation by Using Low-Cost RGB-D Sensors. Sensors 2020, 20, 293. [Google Scholar] [CrossRef] [Green Version]
- Keitaanniemi, A.; Virtanen, J.P.; Rönnholm, P.; Kukko, A.; Rantanen, T.; Vaaja, M. The Combined Use of SLAM Laser Scanning and TLS for the 3D Indoor Mapping. Buildings 2021, 11, 386. [Google Scholar] [CrossRef]
- Raj, T.; Hashim, F.H.; Huddin, A.B.; Ibrahim, M.F.; Hussain, A. A Survey on LiDAR Scanning Mechanisms. Electronics 2020, 9, 741. [Google Scholar] [CrossRef]
- De Geyter, S.; Vermandere, J.; De Winter, H.; Bassier, M.; Vergauwen, M. Point Cloud Validation: On the Impact of Laser Scanning Technologies on the Semantic Segmentation for BIM Modeling and Evaluation. Remote Sens. 2022, 14, 582. [Google Scholar] [CrossRef]
- Otero, R.; Laguela, S.; Garrido, I.; Arias, P. Mobile indoor mapping technologies: A review. Autom. Constr. 2020, 120, 103399. [Google Scholar] [CrossRef]
- Wang, X.; Kong, L.; Kong, F.; Qiu, F.; Xia, M.; Arnon, S.; Chen, G. Millimeter Wave Communication: A Comprehensive Survey. IEEE Commun. Surv. Tutor. 2018, 20, 1616–1653. [Google Scholar] [CrossRef]
- Chaccour, C.; Soorki, M.N.; Saad, W.; Bennis, M.; Popovski, P.; Debbah, M. Seven Defining Features of Terahertz (THz) Wireless Systems: A Fellowship of Communication and Sensing. IEEE Commun. Surv. Tutor. 2022, 24, 967–993. [Google Scholar] [CrossRef]
- Guerra, A.; Guidi, F.; Dardari, D.; Clemente, A.; D’Errico, R. A Millimeter-Wave Indoor Backscattering Channel Model for Environment Mapping. IEEE Trans. Antennas Propag. 2017, 65, 4935–4940. [Google Scholar] [CrossRef]
- Barneto, C.B.; Riihonen, T.; Turunen, M.; Koivisto, M.; Talvitie, J.; Valkama, M. Radio-based Sensing and Indoor Mapping with Millimeter-Wave 5G NR Signals. In Proceedings of the 2020 International Conference on Localization and GNSS (ICL-GNSS), Tampere, Finland, 2–4 June 2020; pp. 1–5. [Google Scholar]
- Amjad, B.; Ahmed, Q.Z.; Lazaridis, P.I.; Hafeez, M.; Khan, F.A.; Zaharis, Z.D. Radio SLAM: A Review on Radio-Based Simultaneous Localization and Mapping. IEEE Access 2023, 11, 9260–9278. [Google Scholar] [CrossRef]
- Baquero Barneto, C.; Rastorgueva-Foi, E.; Keskin, M.F.; Riihonen, T.; Turunen, M.; Talvitie, J.; Wymeersch, H.; Valkama, M. Millimeter-Wave Mobile Sensing and Environment Mapping: Models, Algorithms and Validation. IEEE Trans. Veh. Technol. 2022, 71, 3900–3916. [Google Scholar] [CrossRef]
- Lotti, M.; Pasolini, G.; Guerra, A.; Guidi, F.; D’Errico, R.; Dardari, D. Radio SLAM for 6G Systems at THz Frequencies: Design and Experimental Validation. arXiv 2022, arXiv:eess.SP/2212.12388. [Google Scholar] [CrossRef]
- Lotti, M.; Pasolini, G.; Guerra, A.; Guidi, F.; Caillet, M.; D’Errico, R.; Dardari, D. Radio Simultaneous Localization and Mapping in the Terahertz Band. In Proceedings of the WSA 2021; 25th International ITG Workshop on Smart Antennas, French Riviera, France, 10–12 November 2021; pp. 1–6. [Google Scholar]
- Xu, X.; Zhang, L.; Yang, J.; Cao, C.; Wang, W.; Ran, Y.; Tan, Z.; Luo, M. A review of multi-sensor fusion slam systems based on 3D LIDAR. Remote Sens. 2022, 14, 2835. [Google Scholar] [CrossRef]
- Zhou, H.; Yao, Z.; Zhang, Z.; Liu, P.; Lu, M. An Online Multi-Robot SLAM System Based on Lidar/UWB Fusion. IEEE Sens. J. 2022, 22, 2530–2542. [Google Scholar] [CrossRef]
- Paul, B.; Chiriyath, A.R.; Bliss, D.W. Survey of RF Communications and Sensing Convergence Research. IEEE Access 2017, 5, 252–270. [Google Scholar] [CrossRef]
- Zhang, J.A.; Liu, F.; Masouros, C.; Heath, R.W.; Feng, Z.; Zheng, L.; Petropulu, A. An Overview of Signal Processing Techniques for Joint Communication and Radar Sensing. IEEE J. Sel. Top. Signal Process. 2021, 15, 1295–1315. [Google Scholar] [CrossRef]
- Zhang, J.A.; Rahman, M.L.; Wu, K.; Huang, X.; Guo, Y.J.; Chen, S.; Yuan, J. Enabling Joint Communication and Radar Sensing in Mobile Networks—A Survey. IEEE Commun. Surv. Tutor. 2022, 24, 306–345. [Google Scholar] [CrossRef]
- Rahman, M.L.; Zhang, J.A.; Huang, X.; Guo, Y.J.; Heath, R.W. Framework for a Perceptive Mobile Network Using Joint Communication and Radar Sensing. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 1926–1941. [Google Scholar] [CrossRef] [Green Version]
- Fang, X.; Feng, W.; Chen, Y.; Ge, N.; Zhang, Y. Joint Communication and Sensing Toward 6G: Models and Potential of Using MIMO. IEEE Internet Things J. 2023, 10, 4093–4116. [Google Scholar] [CrossRef]
- Wild, T.; Braun, V.; Viswanathan, H. Joint Design of Communication and Sensing for Beyond 5G and 6G Systems. IEEE Access 2021, 9, 30845–30857. [Google Scholar] [CrossRef]
- Barneto, C.B.; Liyanaarachchi, S.D.; Heino, M.; Riihonen, T.; Valkama, M. Full Duplex Radio/Radar Technology: The Enabler for Advanced Joint Communication and Sensing. IEEE Wirel. Commun. 2021, 28, 82–88. [Google Scholar] [CrossRef]
- Wymeersch, H.; Shrestha, D.; de Lima, C.M.; Yajnanarayana, V.; Richerzhagen, B.; Keskin, M.F.; Schindhelm, K.; Ramirez, A.; Wolfgang, A.; de Guzman, M.F.; et al. Integration of Communication and Sensing in 6G: A Joint Industrial and Academic Perspective. In Proceedings of the 2021 IEEE 32nd Annual International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), Helsinki, Finland, 13–16 September 2021; pp. 1–7. [Google Scholar]
- Liu, A.; Huang, Z.; Li, M.; Wan, Y.; Li, W.; Han, T.X.; Liu, C.; Du, R.; Tan, D.K.P.; Lu, J.; et al. A Survey on Fundamental Limits of Integrated Sensing and Communication. IEEE Commun. Surv. Tutor. 2022, 24, 994–1034. [Google Scholar] [CrossRef]
- Eldar, Y.C.; Goldsmith, A.; Gündüz, D.; Poor, H.V. (Eds.) Machine Learning and Wireless Communications, 1st ed.; Cambridge University Press: Cambridge, UK, 2022. [Google Scholar]
- Huang, C.; He, R.; Ai, B.; Molisch, A.F.; Lau, B.K.; Haneda, K.; Liu, B.; Wang, C.X.; Yang, M.; Oestges, C.; et al. Artificial Intelligence Enabled Radio Propagation for Communications—Part I: Channel Characterization and Antenna-Channel Optimization. IEEE Trans. Antennas Propag. 2022, 70, 3939–3954. [Google Scholar] [CrossRef]
- Huang, J.; Wang, C.X.; Bai, L.; Sun, J.; Yang, Y.; Li, J.; Tirkkonen, O.; Zhou, M.T. A Big Data Enabled Channel Model for 5G Wireless Communication Systems. IEEE Trans. Big Data 2020, 6, 211–222. [Google Scholar] [CrossRef] [Green Version]
- Tabaa, M.; Diou, C.; El Aroussi, M.; Chouri, B.; Dandache, A. LOS and NLOS identification based on UWB stable distribution. In Proceedings of the 2013 25th International Conference on Microelectronics (ICM), Beirut, Lebanon, 15–18 December 2013; pp. 1–4. [Google Scholar]
- Chen, Z.; AlHajri, M.I.; Wu, M.; Ali, N.T.; Shubair, R.M. A Novel Real-Time Deep Learning Approach for Indoor Localization Based on RF Environment Identification. IEEE Sens. Lett. 2020, 4, 1–4. [Google Scholar] [CrossRef]
- Herrera, F.; Charte, F.; Rivera, A.J.; del Jesus, M.J. Multilabel Classification: Problem Analysis, Metrics and Techniques; Springer: Cham, Switzerland, 2016. [Google Scholar]
- Madjarov, G.; Kocev, D.; Gjorgjevikj, D.; Džeroski, S. An extensive experimental comparison of methods for multi-label learning. Pattern Recognit. 2012, 45, 3084–3104. [Google Scholar] [CrossRef]
- Breiman, L.; Friedman, J.; Stone, C.; Olshen, R. Classification and Regression Trees, 1st ed.; Taylor & Francis Group: Bocca Raton, FL, USA, 1984. [Google Scholar]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Vapnik, V.; Guyon, I.; Hastie, T. Support vector machines. Mach. Learn. 1995, 20, 273–297. [Google Scholar]
- Gallant, S.I. Perceptron-based learning algorithms. IEEE Trans. Neural Netw. 1990, 1, 179–191. [Google Scholar] [CrossRef]
- Rokach, L.; Maimon, O. Top-down induction of decision trees classifiers—A survey. IEEE Trans. Syst. Man Cybern. Part C (Appl. Rev.) 2005, 35, 476–487. [Google Scholar] [CrossRef] [Green Version]
- Bramer, M.A. Principles of Data Mining, 3rd ed.; Undergraduate Topics in Computer Science; Springer: London, UK, 2007. [Google Scholar]
- Berthold, M.; Hand, D.J. Intelligent Data Analysis; Springer: Berlin/Heidelberg, Germany, 2003; Volume 2. [Google Scholar]
- Svozil, D.; Kvasnicka, V.; Pospichal, J. Introduction to multi-layer feed-forward neural networks. Chemom. Intell. Lab. Syst. 1997, 39, 43–62. [Google Scholar] [CrossRef]
- Sharma, S.; Sharma, S.; Athaiya, A. Activation functions in neural networks. Int. J. Eng. Appl. Sci. Technol. 2017, 4, 310–316. [Google Scholar] [CrossRef]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-learn: Machine Learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Buitinck, L.; Louppe, G.; Blondel, M.; Pedregosa, F.; Mueller, A.; Grisel, O.; Niculae, V.; Prettenhofer, P.; Gramfort, A.; Grobler, J.; et al. API design for machine learning software: Experiences from the scikit-learn project. arXiv 2013, arXiv:1309.0238. [Google Scholar]
- Géron, A. Hands-On Machine Learning with Scikit-Learn and Tensorflow: Concepts. Tools, and Techniques to Build Intelligent Systems; O’Reilly Media: Sebastopol, CA, USA, 2017. [Google Scholar]
- McKown, J.; Hamilton, R. Ray tracing as a design tool for radio networks. IEEE Netw. 1991, 5, 27–30. [Google Scholar] [CrossRef]
- IEEE. Standard IEEE 802.15.4-2011; Standard for Local and Metropolitan Area Networks–Part 15.4: Low-Rate Wireless Personal Area Networks (LR-WPANs). IEEE: Washington, DC, USA, 2011.
- Molisch, A.F. Wireless Communications, 2nd ed.; Wiley IEEE: Chichester, UK, 2011. [Google Scholar]
- Saunders, S.R.; Aragón-Zavala, A. Antennas and Propagation for Wireless Communication Systems; John Wiley & Sons: Chichester, UK, 2007. [Google Scholar]
- Kocevska, T.; Hrovat, A.; Javornik, T. Indoor UWB CIR Data Set for Material Prediction. 2023. Available online: https://doi.org/10.5281/zenodo.7840706 (accessed on 12 May 2023). [CrossRef]
- Sector of International Telecommunication Union (ITU-R). Effects of Building Materials and Structures on Radiowave Propagation above about 100 MHz; ITU-R Recommendation P.2040-2; International Telecommunication Union: Geneva, Switzerland, 2021. [Google Scholar]
- Wireless In Site Propagation Software v. 3.3.3. Available online: https://www.remcom.com/wireless-insite-em-propagation-software (accessed on 15 March 2023).
- Medeđović, P.; Veletić, M.; Blagojević, Ž. Wireless insite software verification via analysis and comparison of simulation and measurement results. In Proceedings of the 2012 Proceedings of the 35th International Convention MIPRO, Opatija, Croatia, 21–25 May 2012; pp. 776–781. [Google Scholar]
- Gündüzalp, E.; Yildirim, G.; Tatar, Y. Radio Propagation Prediction Using SBR in a Tunnel with Narrow Cross-Section and Obstacles. In Proceedings of the 2019 International Conference on Applied Automation and Industrial Diagnostics (ICAAID2019), Elazig, Turkey, 25–27 September 2019; Volume 1, pp. 1–6. [Google Scholar]
- Forman, G.; Scholz, M. Apples-to-Apples in Cross-Validation Studies: Pitfalls in Classifier Performance Measurement. SIGKDD Explor. Newsl. 2010, 12, 49–57. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Hyper-Parameters and Their Values |
|---|---|
| DT | max_depth = [2, 5, 10], min_samples_leaf = [25, 50, 75], criterion = [‘gini’, ‘entropy’] |
| RF | max_depth = [2, 5, 10], min_samples_leaf = [25, 50, 75], n_estimators = [50, 100, 200, 300] |
| MLP | hidden_layer_sizes = [(25), (22, 11), (32, 8), (16, 8)], activation = [‘logistic’, ‘tanh’, ‘relu’], solver = [‘sgd’, ‘adam’], learning_rate = [‘constant’, ‘adaptive’], max_iter = [4000, 5000, 6000] |
| SVM | kernel = [‘linear’, ‘rbf’], C = [0.01, 0.1, 1, 10, 100], max_iter = [1000, 2000] |
| Number of Links | |||
|---|---|---|---|
| Fixed-Node Topology | S Room | M Room | L Room |
| T1 | 9 | 25 | 49 |
| T2 | 72 | 200 | 392 |
| T3 | 36 | 100 | 196 |
| Scenario | Room Sizes in Train/Test Set | Node Topology in Train/Test Set |
|---|---|---|
| Init | SML/SML | (a): T1/T1, T2/T2, or T3/T3 |
| (b): T1/T2, T1/T3, T2/T1, T2/T3, T3/T1, or T3/T2 | ||
| Diff-RS | (a): S/ML, M/SL, or L/SM | All/All * |
| (b): SM/L, ML/S, or SL/M | ||
| Diff-RS-Lyt | (a): S/ML or L/SM | T1/T2, T1/T3, T2/T1, T2/T3, T3/T1, or T3/T2 |
| (b): SM/L or SL/M |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kocevska, T.; Javornik, T.; Švigelj, A.; Rashkovska, A.; Hrovat, A. Identification of Indoor Radio Environment Properties from Channel Impulse Response with Machine Learning Models. Electronics 2023, 12, 2746. https://doi.org/10.3390/electronics12122746
Kocevska T, Javornik T, Švigelj A, Rashkovska A, Hrovat A. Identification of Indoor Radio Environment Properties from Channel Impulse Response with Machine Learning Models. Electronics. 2023; 12(12):2746. https://doi.org/10.3390/electronics12122746
Chicago/Turabian StyleKocevska, Teodora, Tomaž Javornik, Aleš Švigelj, Aleksandra Rashkovska, and Andrej Hrovat. 2023. "Identification of Indoor Radio Environment Properties from Channel Impulse Response with Machine Learning Models" Electronics 12, no. 12: 2746. https://doi.org/10.3390/electronics12122746