
Adaptive Droop Control of VSC-MTDC System Based on Virtual Inertia
Abstract
:1. Introduction
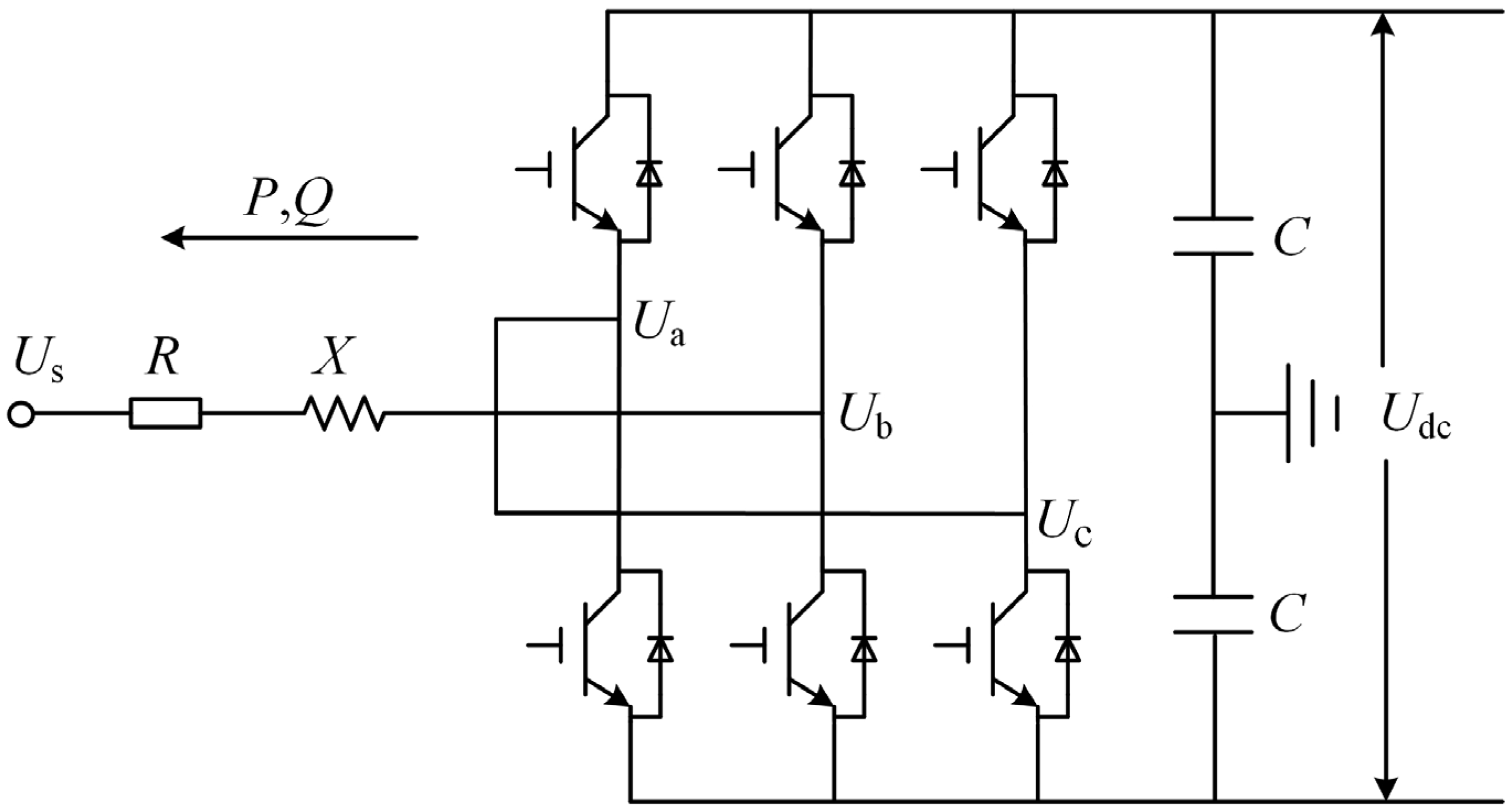
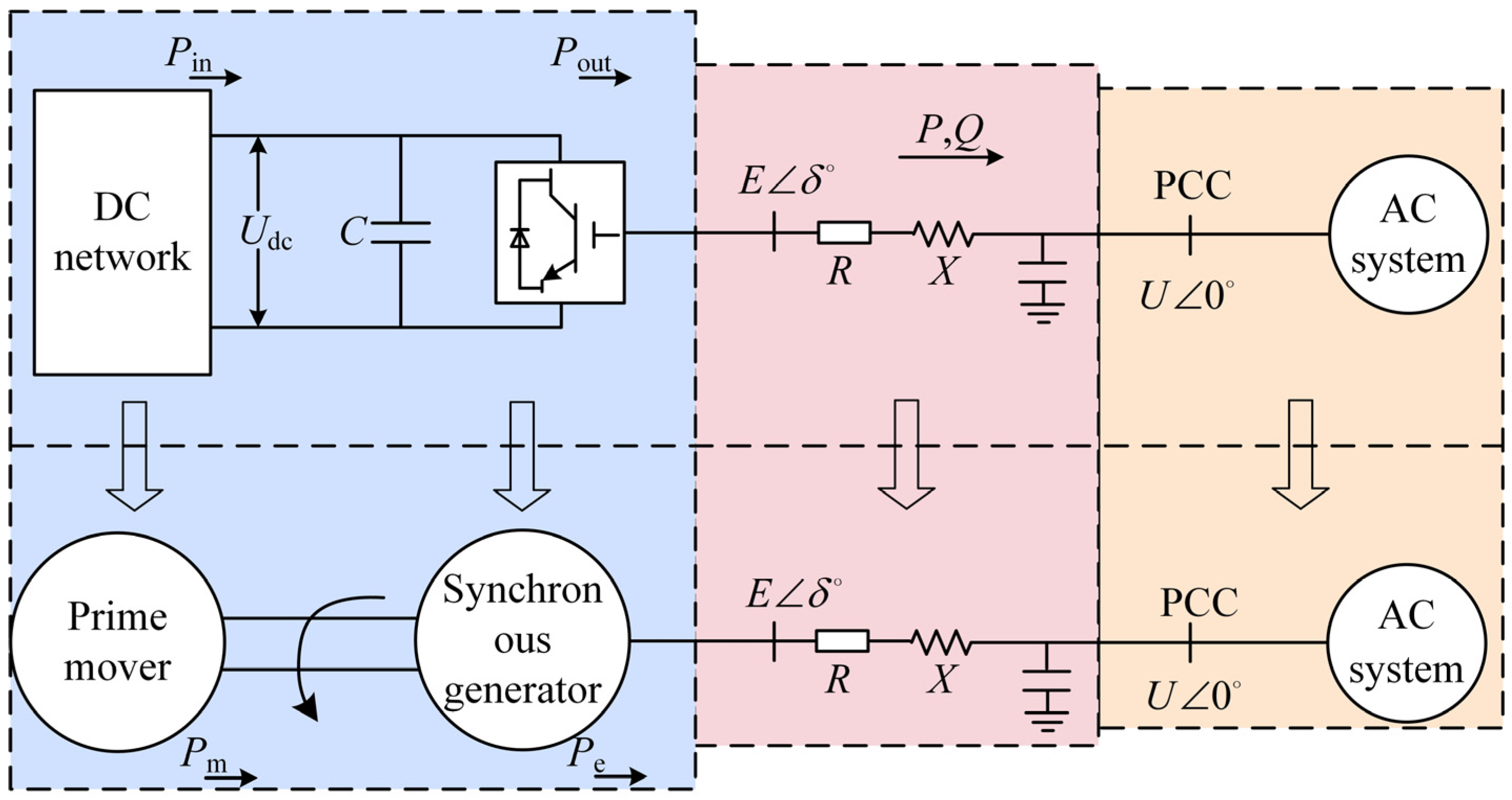
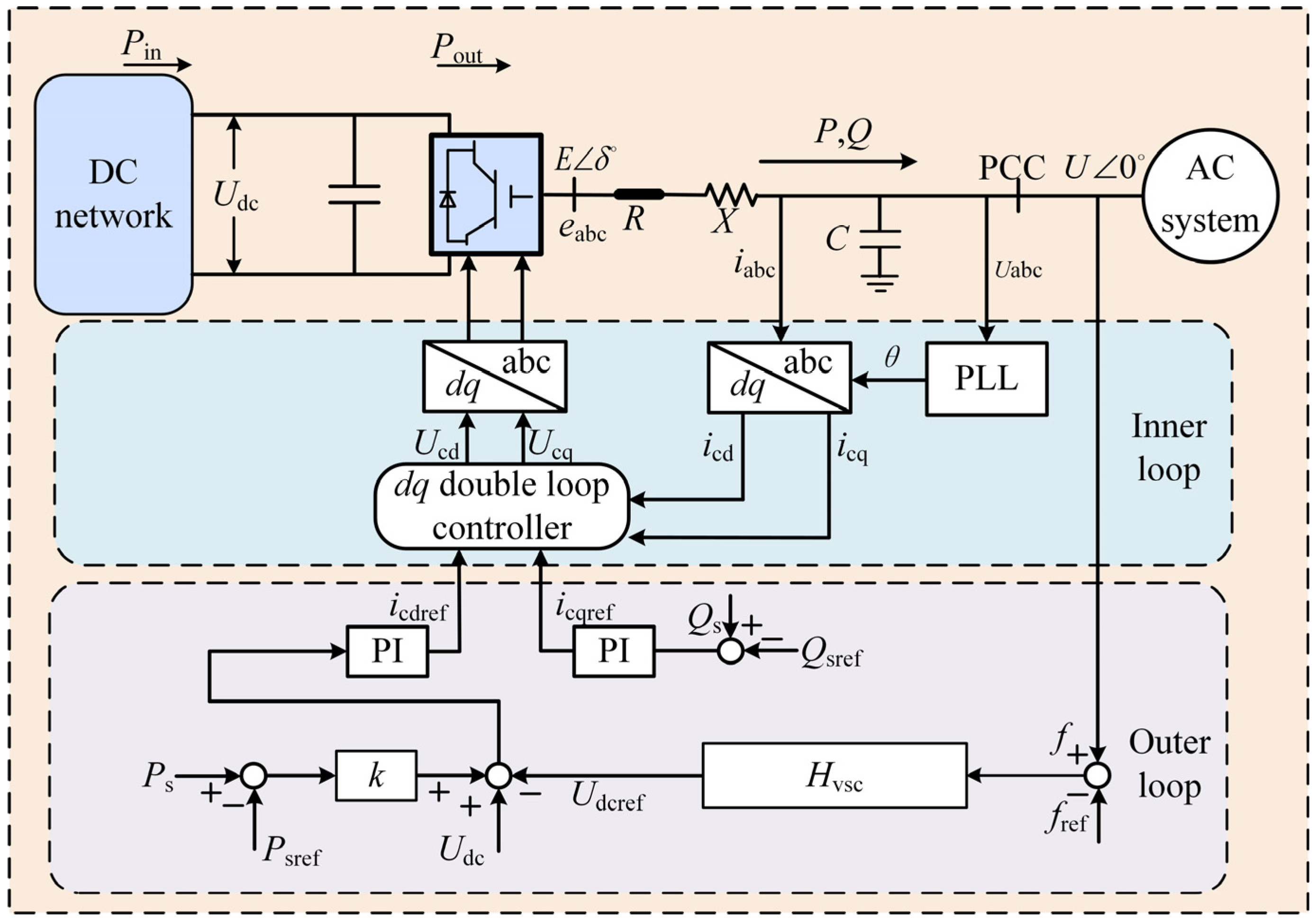
2. VSC-MTDC System Structure and Mathematical Model
3. Adaptive Droop Control Strategy Based on Virtual Inertia
3.1. Control of the Virtual Inertial Frequency
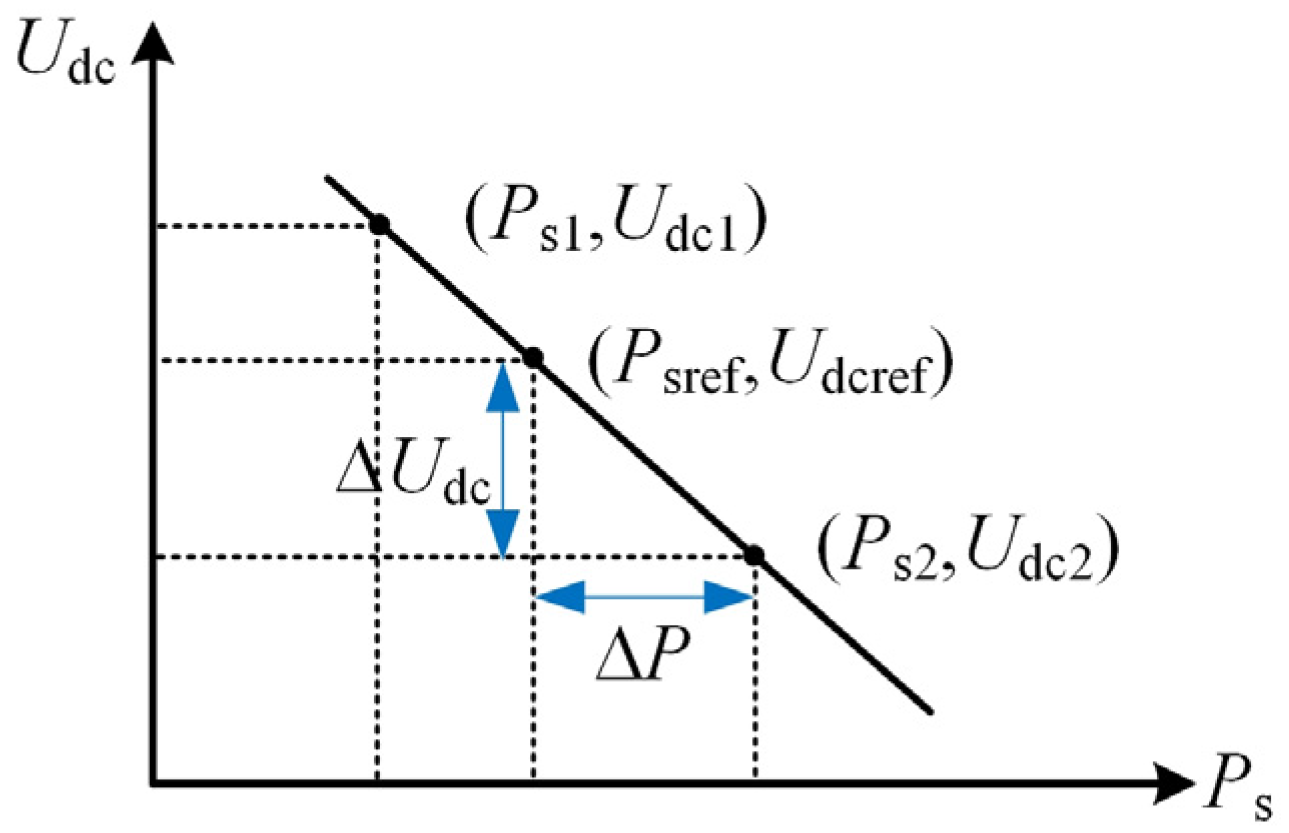
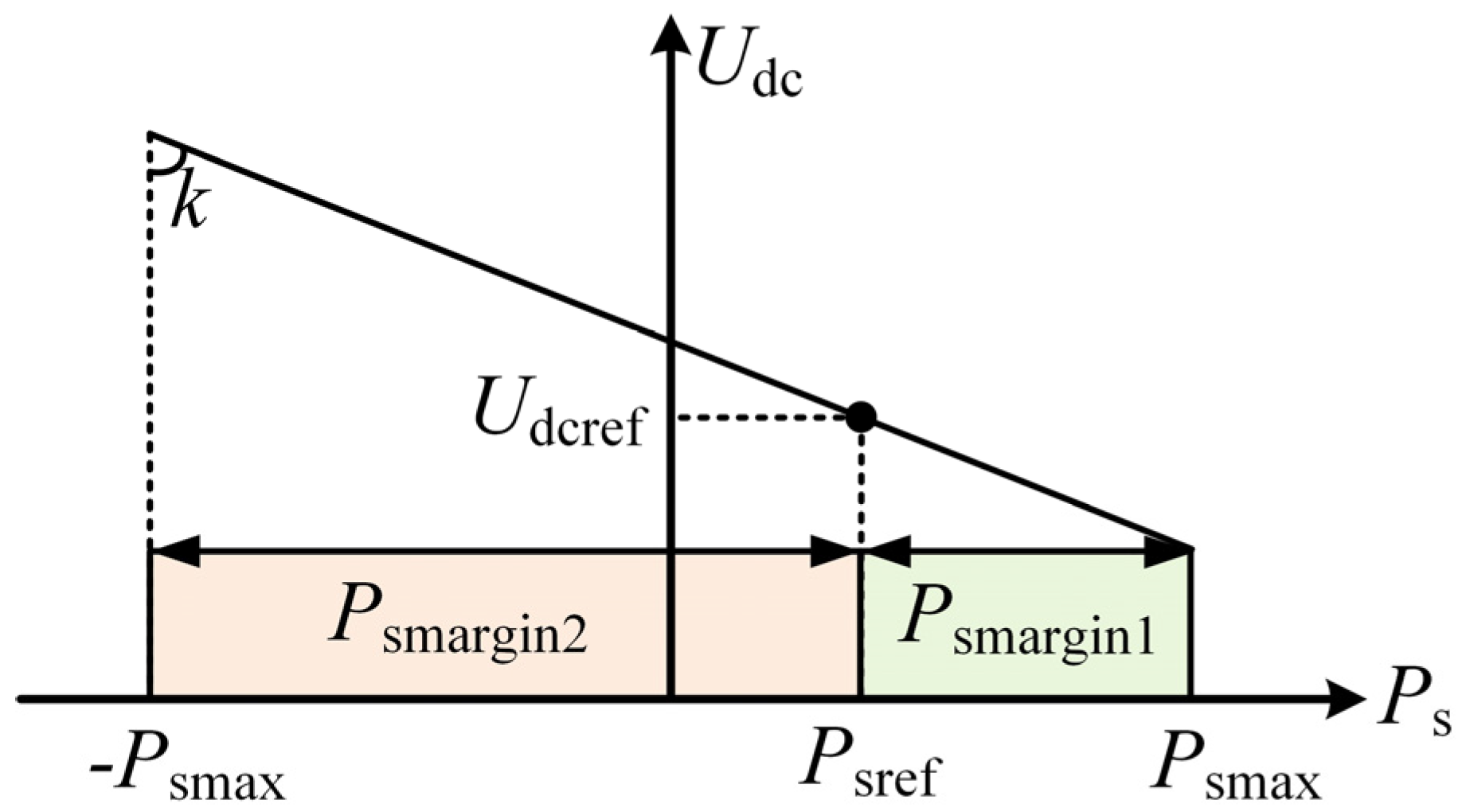
3.2. Analysis of Conventional DC Voltage Droop Control Characteristics
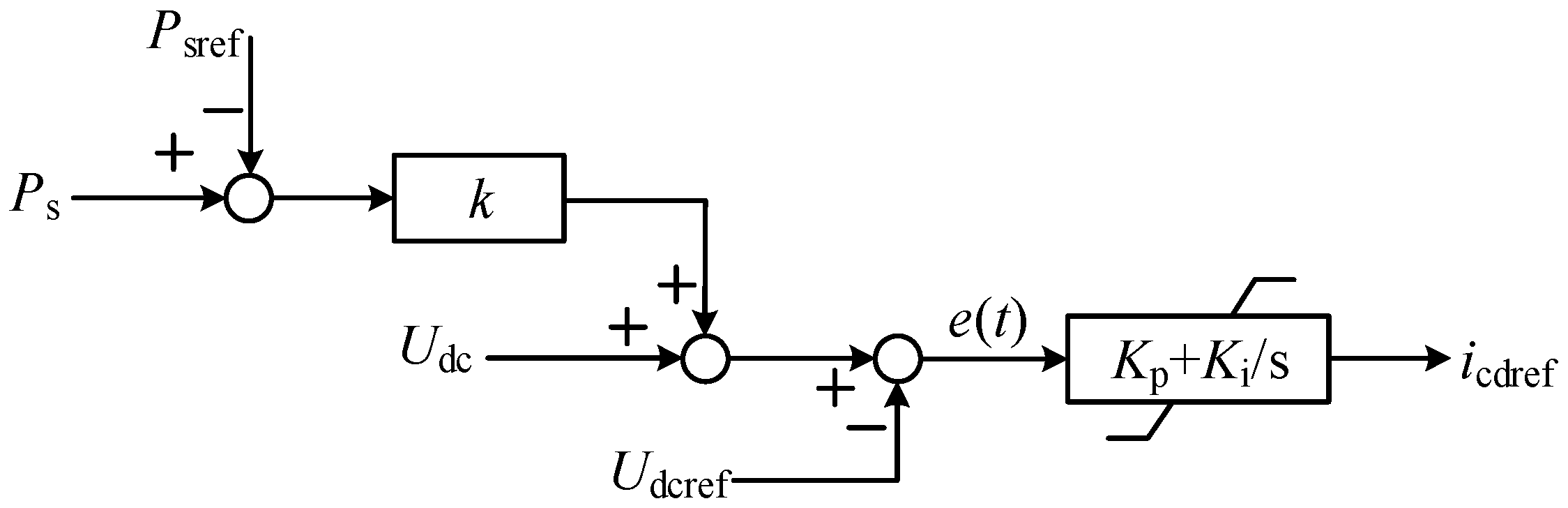
3.3. Adaptive Droop Control Strategy Considering Power Margin
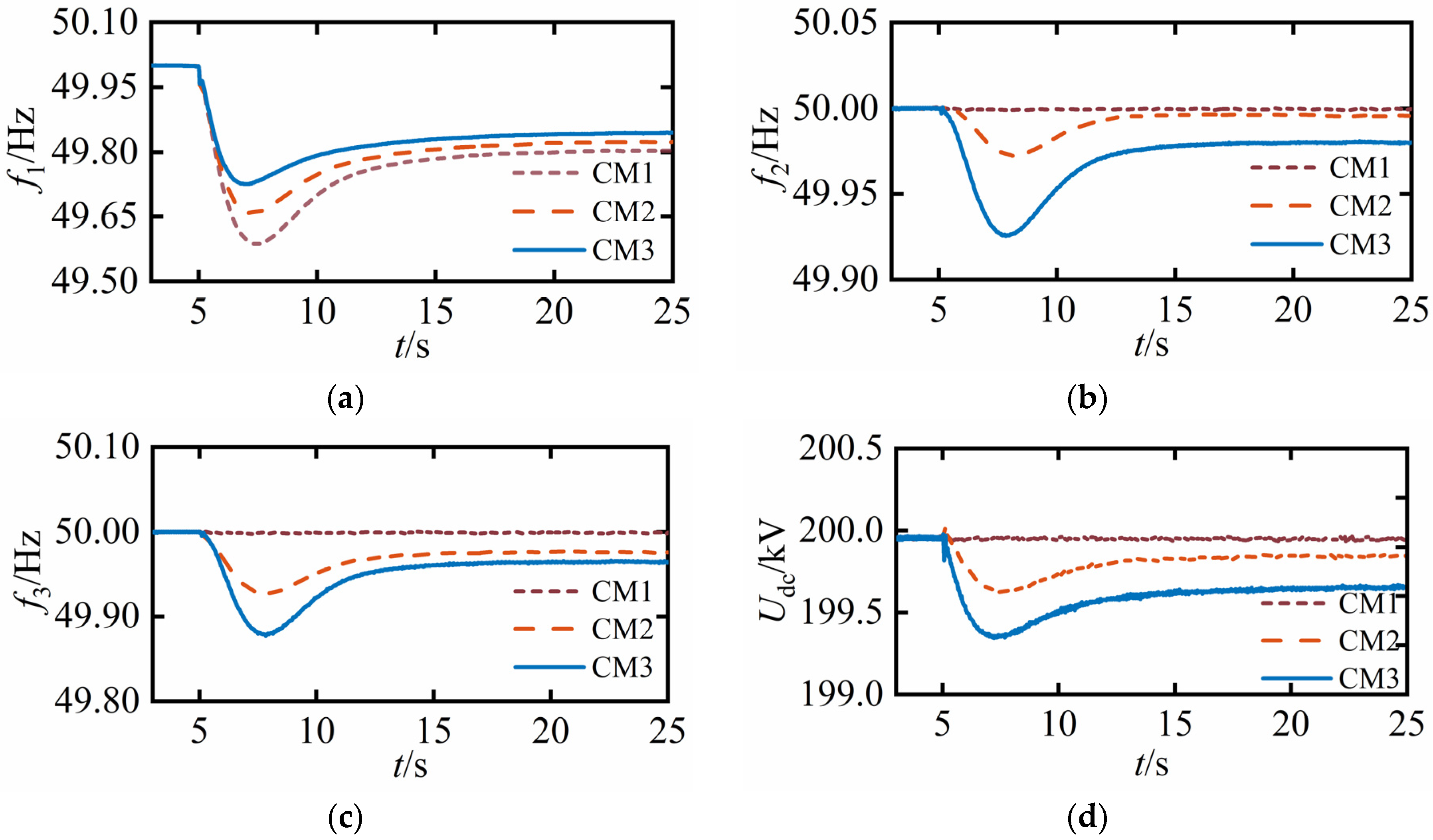
4. Simulation and Analysis
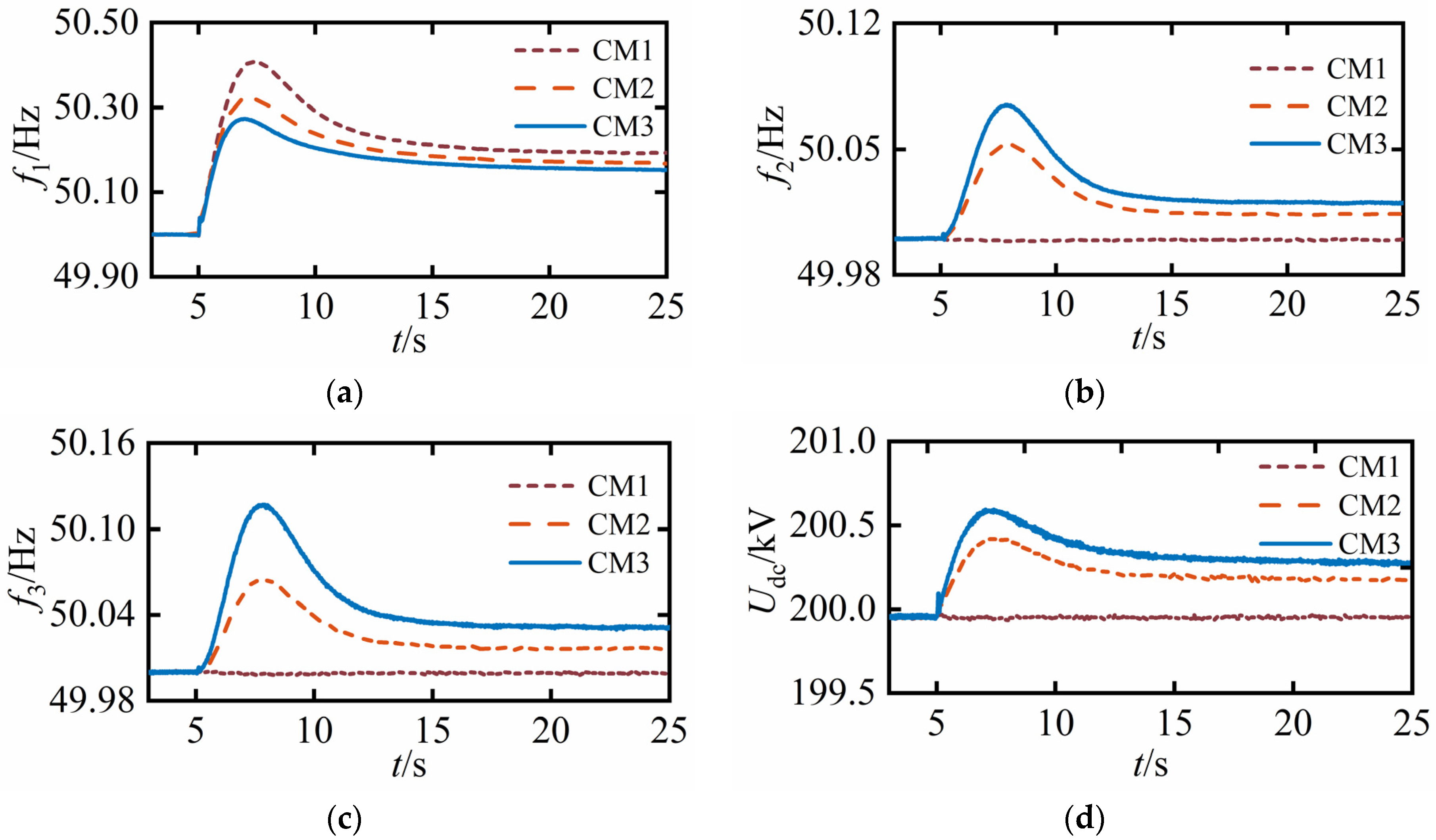
4.1. Sudden Increase of Power Grid Load
4.2. Sudden Decrease of Power Grid Load
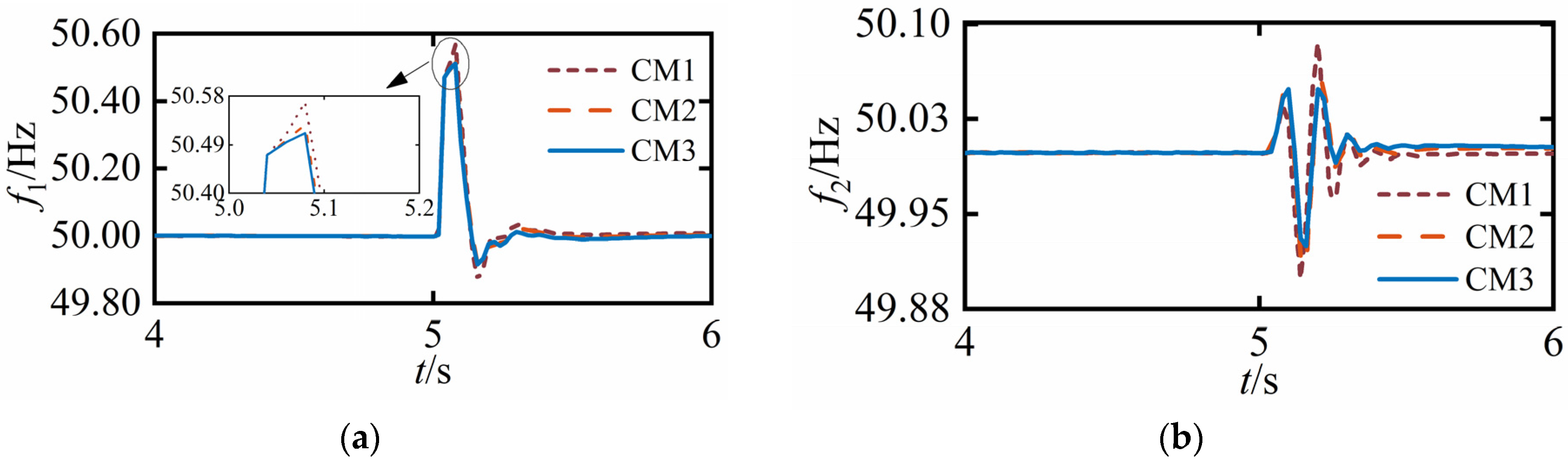
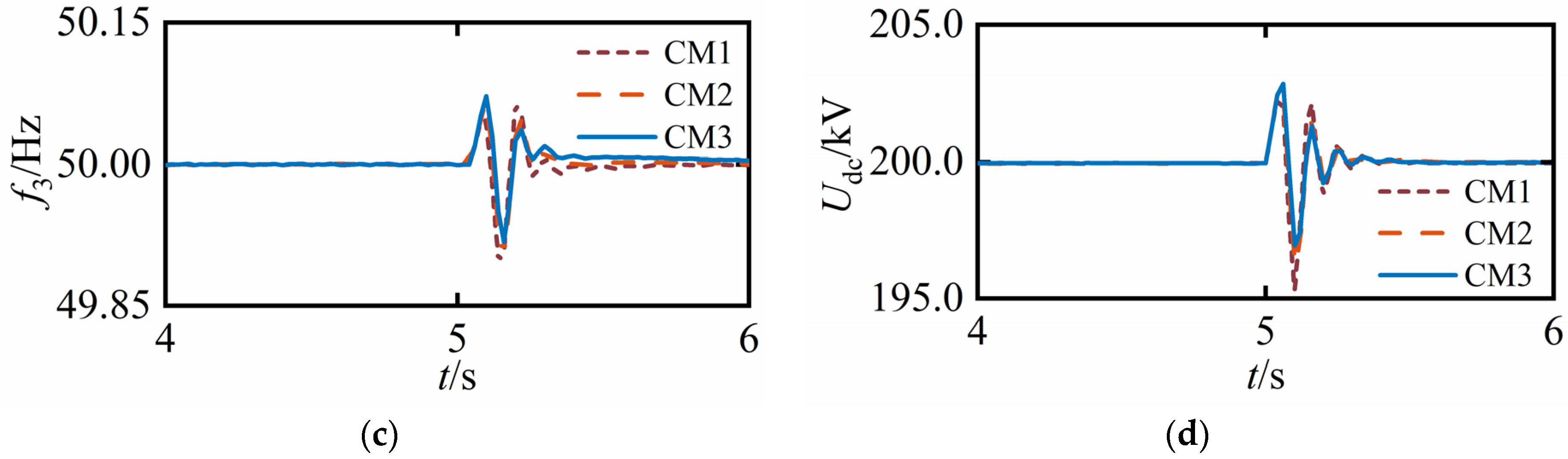
4.3. Single-Phase Short Circuit Fault in AC Power Grid
5. Conclusions
- (1)
- Coupling AC frequency and DC voltage through virtual inertia control stabilizes the frequency and improves the frequency response characteristics.
- (2)
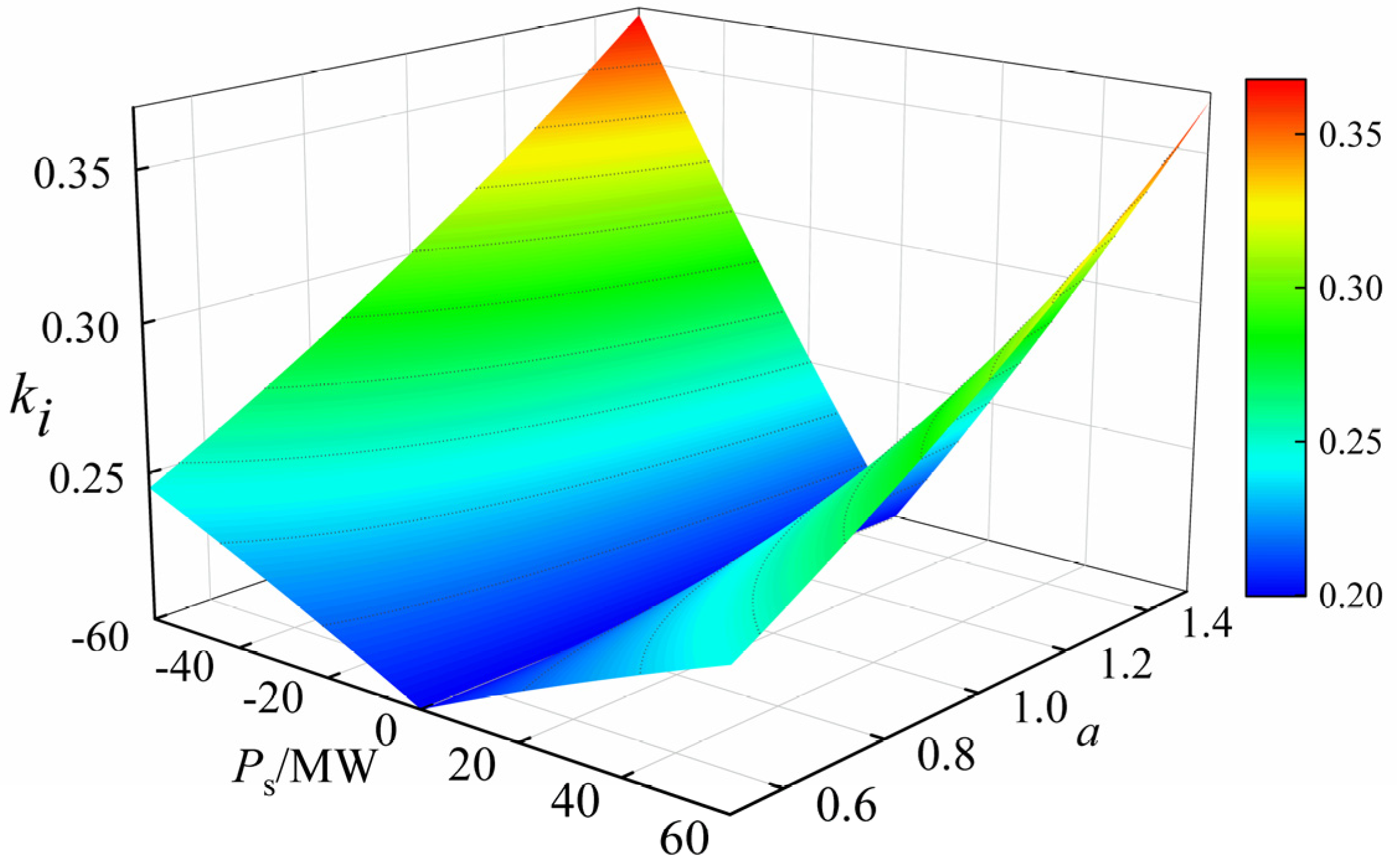
- To solve the problem of the virtual inertia coefficient being constrained by the DC voltage deviation, the inertia coefficient is adaptively modified according to the DC voltage deviation. If the DC voltage deviation is small, the inertia coefficient is increased to obtain a better frequency response; on the contrary, the inertia coefficient is reduced to prevent the DC voltage from crossing the limit.
- (3)
- By adjusting the droop coefficient dynamically through the power margin of the VSC station and by distributing the unbalanced power appropriately, the DC voltage deviation can be reduced when the DC system is involved in AC frequency regulation.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Alamri, B.; Hossain, M.A.; Asghar, M.J. Electric power network interconnection: A review on current status, future prospects and research direction. Electronics 2021, 10, 2179. [Google Scholar]
- Sun, P.; Wang, Y.; Khalid, M.; Gimenez, R.B.; Konstantinou, G. Steady-state power distribution in VSC-based MTDC systems and DC grids under mixed P/V and I/V droop control. Electr. Power Syst. Res. 2022, 214, 108798. [Google Scholar] [CrossRef]
- Radwan, A.A.A. Small-signal stability analysis of multi-terminal DC grids. Electronics 2019, 8, 130. [Google Scholar] [CrossRef]
- Liu, C.; Liu, H.; Jiang, S.; Zheng, L. A novel dynamic additional frequency control strategy for VSC-MTDC system. CSEE J. Power Energy Syst. 2023, 9, 645–658. [Google Scholar]
- Liu, Y.; Cui, H.; Liang, H.; He, J. Additional frequency adaptive droop control strategy considering DC voltage stability for VSC-MTDC system. Power Syst. Technol. 2020, 44, 2160–2168. [Google Scholar]
- Dolado, J.; Amenedo, J.L.R.; Arnaltes, S.; Garcia, J.E. Improving the inertial response of a grid-forming voltage source converter. Electronics 2022, 11, 2303. [Google Scholar] [CrossRef]
- Li, Z.; Wei, Z.; Zhan, R.; Li, Y.; Tang, Y.; Zhang, X. Frequency support control method for interconnected power systems using VSC-MTDC. IEEE Trans. Power Syst. 2021, 36, 2304–2313. [Google Scholar] [CrossRef]
- Zhu, R.; Li, X.; Ying, D. A frequency stability control strategy for interconnected VSC-MTDC transmission system. Power Syst. Technol. 2013, 38, 2729–2734. [Google Scholar]
- Liu, H.; Liu, C.; Jiang, S. Dynamic additional frequency control strategy for VSC-MTDC transmission system. Electr. Power Autom. Equip. 2022, 42, 164–170. [Google Scholar]
- Shadabi, H.; Kamwa, I. Dual Adaptive nonlinear droop control of VSC-MTDC system for improved transient stability and provision of primary frequency support. IEEE Access 2021, 9, 76806–76815. [Google Scholar] [CrossRef]
- Fang, J.; Li, H.; Tang, Y.; Blaabjerg, F. Distributed power system virtual inertia implemented by grid-connected power converters. IEEE Trans. Power Electron. 2018, 33, 8488–8499. [Google Scholar] [CrossRef]
- Zhu, J.; Booth, C.D.; Adam, G.P.; Roscoe, A.J.; Bright, C.G. Inertia emulation control strategy for VSC-HVDC transmission systems. IEEE Trans. Power Syst. 2013, 28, 1277–1287. [Google Scholar] [CrossRef]
- Liu, Y.; Hu, J.; Shi, J.; Yang, B. Adaptive integrated control strategy for MMC-MTDC transmission system considering dynamic frequency response and power sharing. Int. J. Electr. Power Energy Syst. 2023, 147, 108858. [Google Scholar] [CrossRef]
- Shen, Z.; Zhu, J.; Ge, L.; Bu, S.; Zhao, J.; Chung, C.; Li, X.; Wang, C. Variable-inertia emulation control scheme for VSC-HVDC transmission systems. IEEE Trans. Power Syst. 2022, 37, 629–639. [Google Scholar] [CrossRef]
- Ambia, M.N.; Meng, K.; Xiao, W.; Durra, A.A.; Dong, Z. Interactive grid synchronization based virtual synchronous generator control scheme on weak frid integration. IEEE Trans. Smart Grid 2022, 13, 4057–4071. [Google Scholar] [CrossRef]
- Yu, J.; Sun, W.; Yu, J.; Wang, Y. Virtual synchronous generator control of a grid connected inverter based on adaptive inertia. Power Syst. Prot. Control 2022, 50, 137–144. [Google Scholar]
- Ke, X.; Zhang, W.; Li, P.; Niu, S.; Sheng, S.; Yang, J. Fuzzy adaptive virtual inertia control for high wind power penetration system. Power Syst. Technol. 2020, 44, 2127–2136. [Google Scholar]
- Liu, Y.; Shi, J.; Liang, H.; Yang, B. Adaptive droop control strategy for VSC-MTDC system based on virtual inertial frequency regulation. Renew. Energy Resour. 2022, 40, 1081–1088. [Google Scholar]
- Zhu, R.; Li, X.; Wu, F. A novel droop control strategy taking into account the available headroom for VSC-MTDC system. J. Sichuan Univ. 2015, 47, 137–143. [Google Scholar]
- Mohammadi, F.; Nazri, G.A.; Saif, M. An improved droop based control strategy for MT-HVDC systems. Electronics 2020, 9, 87. [Google Scholar] [CrossRef]
- Meng, G.; Lu, Y.; Liu, H.; Ye, Y.; Sun, Y.; Tan, W. Adaptive droop coefficient and SOC equalization based primary frequency modulation control strategy of energy storage. Electronics 2021, 10, 2645. [Google Scholar] [CrossRef]
- Cheng, L.; Jin, G.; Wang, L.; Li, G.; Wang, Z.; Chen, J. Application scenarios and system design of medium-voltage DC distribution network. Autom. Electr. Power Syst. 2019, 43, 81–89. [Google Scholar]
- Peng, Q.; Liu, T.; Zhang, Y.; Li, B.; Tang, S. Adaptive droop control of VSC based DC grid considering power margin and system stability. Proc. Chin. Soc. Electr. Eng. 2018, 38, 3498–3506. [Google Scholar]
- Zeng, Q.; Li, X.; Zhang, L. Improved optimization droop control strategy taking into account the network loss and available headroom for VSC-MTDC system. High Volt. Eng. 2016, 42, 3117–3125. [Google Scholar]
- Zhang, X.; Shao, X.; Fu, Y.; Zhao, X.; Jiang, G. Transient voltage recovery control and stability criterion of VSC-based DC power grid. IEEE Trans. Power Syst. 2021, 36, 3496–3506. [Google Scholar] [CrossRef]
- Li, J.; Yang, M.; Li, J.; Xiao, Y.; Wang, J. Research on adaptive exponential droop control strategy for VSC-MTDC system. Electronics 2022, 11, 2788. [Google Scholar] [CrossRef]
- Li, B.; Li, Q.; Wang, Y.; Wen, W.; Li, B.; Xu, L. A novel method to determine droop coefficients of DC voltage control for VSC-MTDC system. IEEE Trans. Power Deliv. 2020, 35, 2196–2211. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Parameter Name | Parameter Value |
|---|---|---|
| 1 | VSC1/VSC2/VSC3 capacity/Svsc | 60/60/120 MW |
| 2 | System DC voltage/Udcref | 200 kV |
| 3 | System AC voltage/Uac | 110 kV |
| 4 | Number of DC capacitors/Nm | 2 |
| 5 | DC capacitance/C | 0.0015 F |
| 6 | Rated frequency on AC side/fref | 50 Hz |
| 7 | Initial droop coefficient/k1/k2/k3 | 0.2/0.2/0.1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, C.; Zhang, X.; He, P.; Zhen, Z.; Zhao, K. Adaptive Droop Control of VSC-MTDC System Based on Virtual Inertia. Electronics 2023, 12, 2324. https://doi.org/10.3390/electronics12102324
Li C, Zhang X, He P, Zhen Z, Zhao K. Adaptive Droop Control of VSC-MTDC System Based on Virtual Inertia. Electronics. 2023; 12(10):2324. https://doi.org/10.3390/electronics12102324
Chicago/Turabian StyleLi, Congshan, Xiaowei Zhang, Ping He, Zikai Zhen, and Kefeng Zhao. 2023. "Adaptive Droop Control of VSC-MTDC System Based on Virtual Inertia" Electronics 12, no. 10: 2324. https://doi.org/10.3390/electronics12102324