
Frequency Support Control of Multi-Terminal Direct Current System Integrated Offshore Wind Farms Considering Direct Current Side Stability

Abstract
:1. Introduction
2. Frequency Support Control of OWF-MTDC Systems
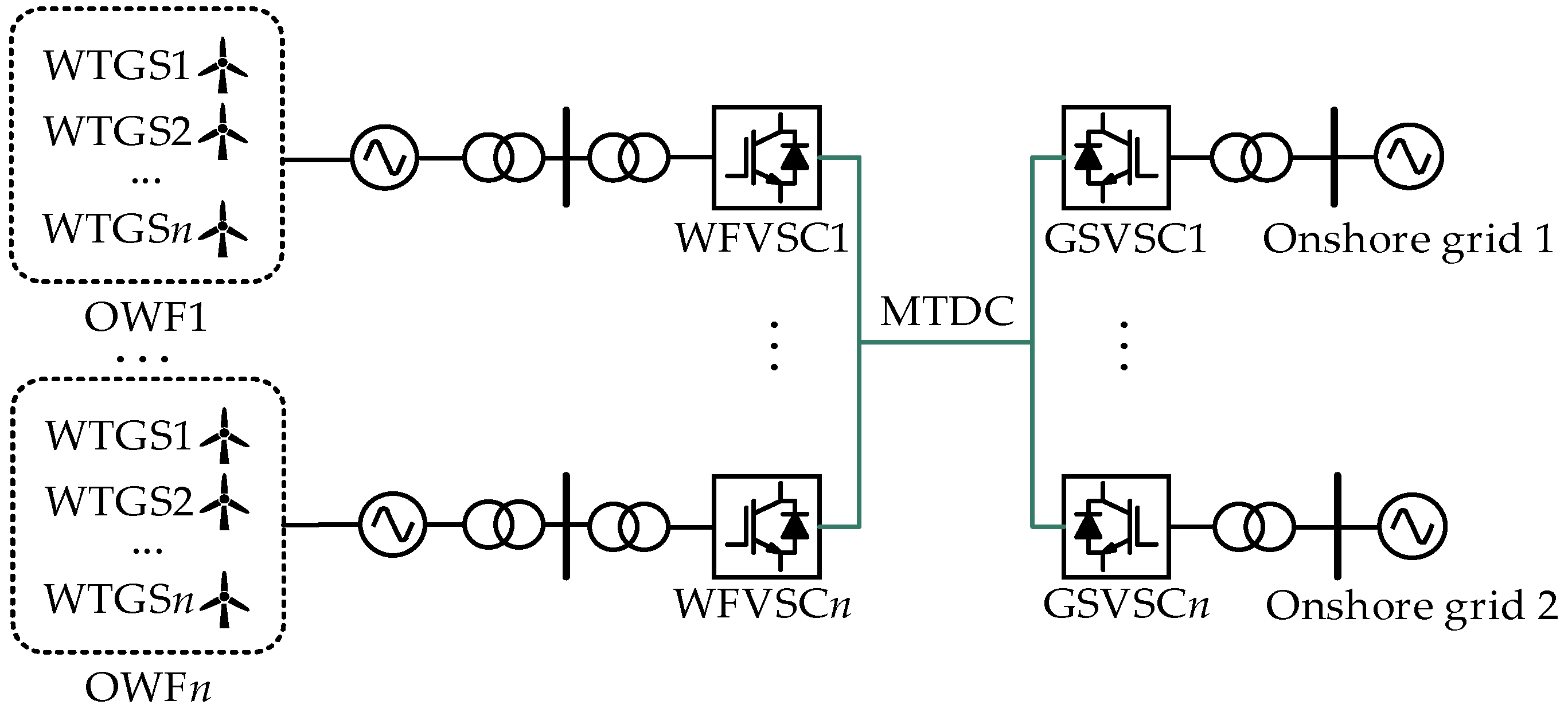
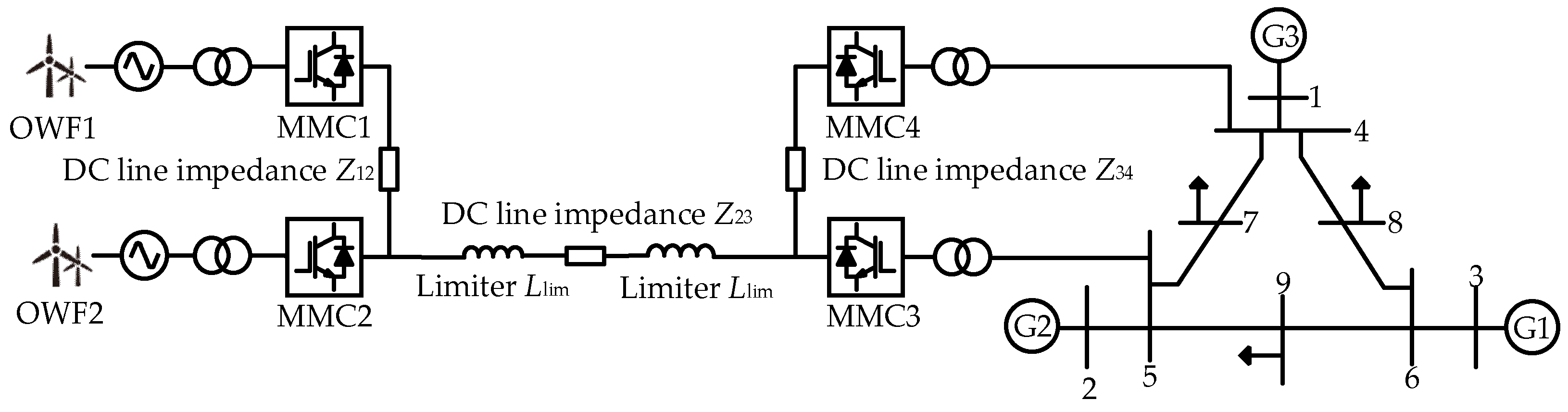
2.1. Configuration of OWF-MTDC System
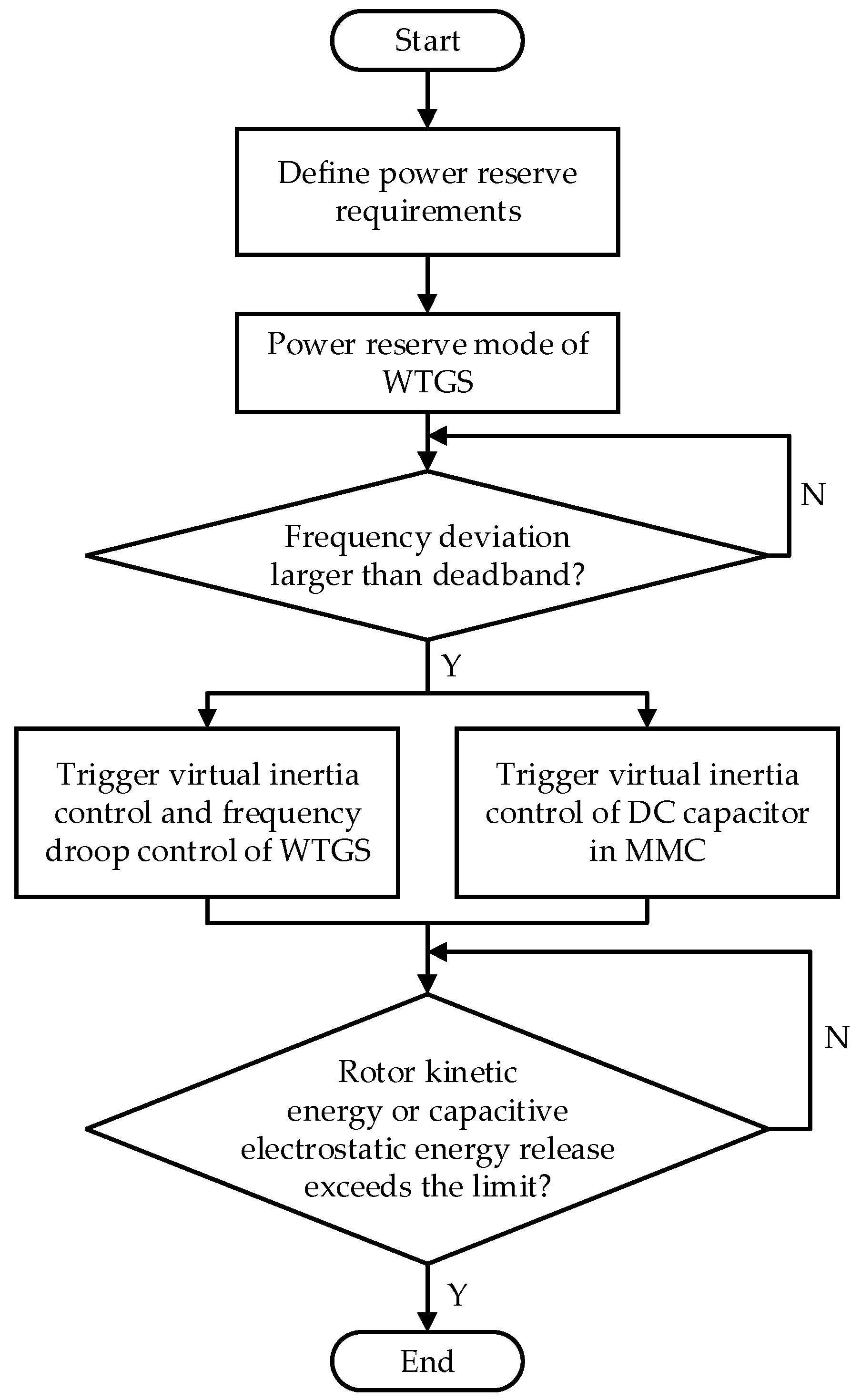
2.2. Power Reserve Control of WTGS
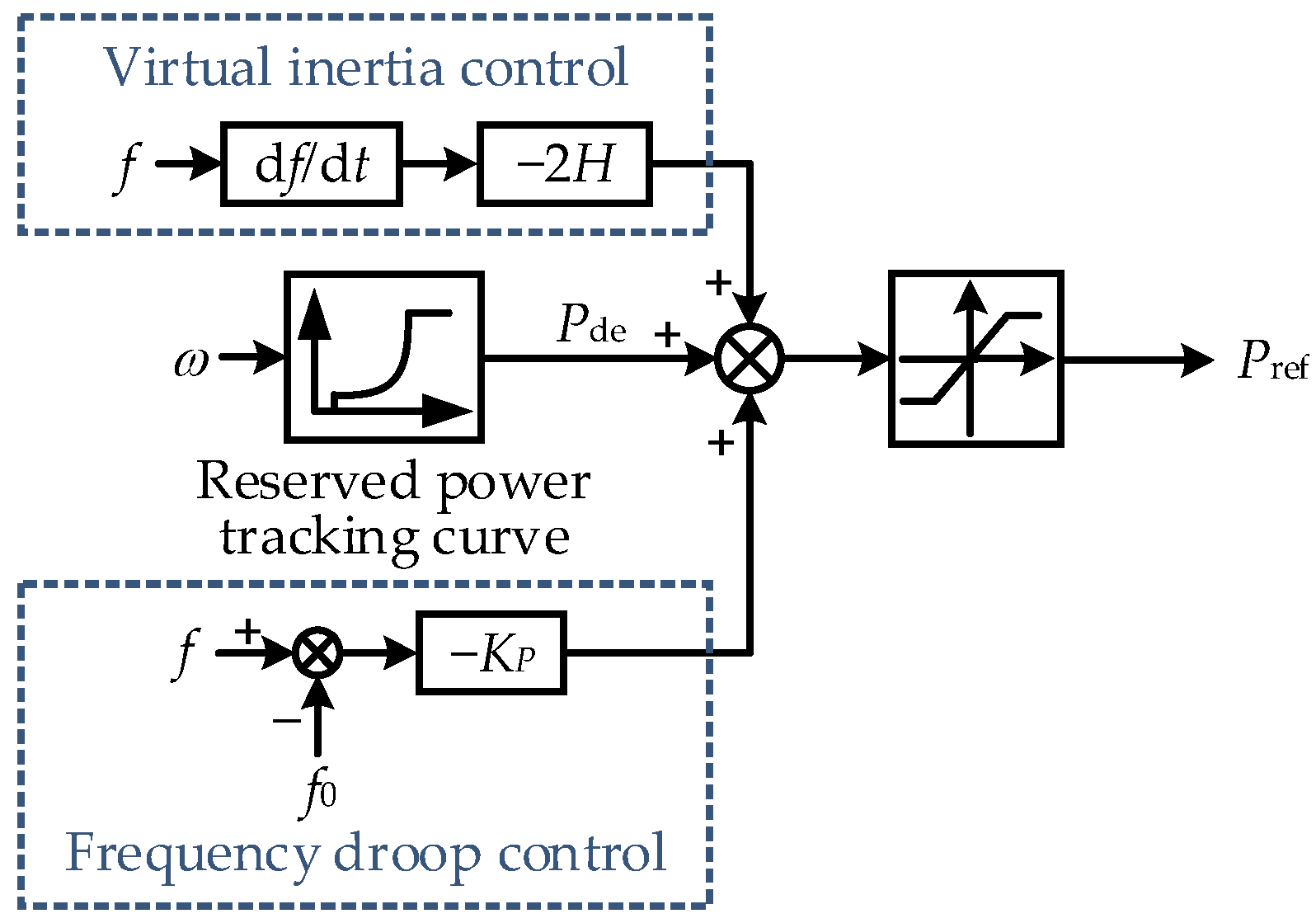
2.3. Frequency Support Control of WTGS
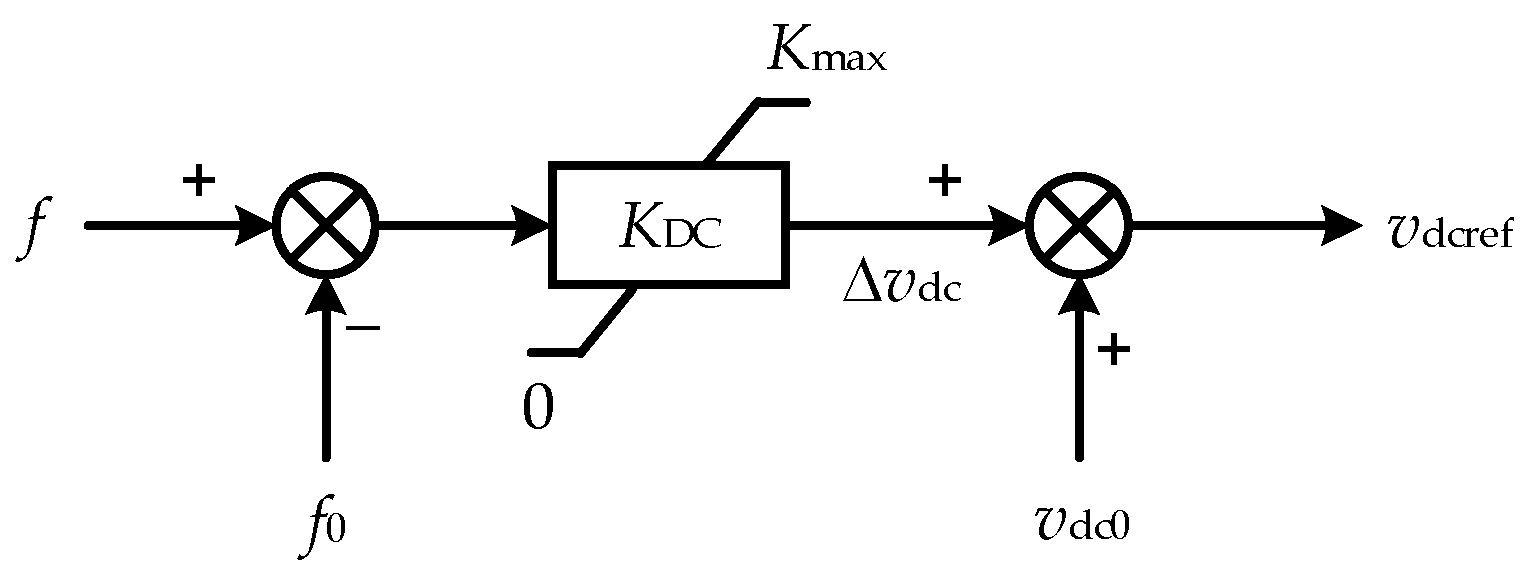
2.4. Virtual Inertia Control of DC Capacitor in MMC
3. DC Side Stability Analysis of MTDC System
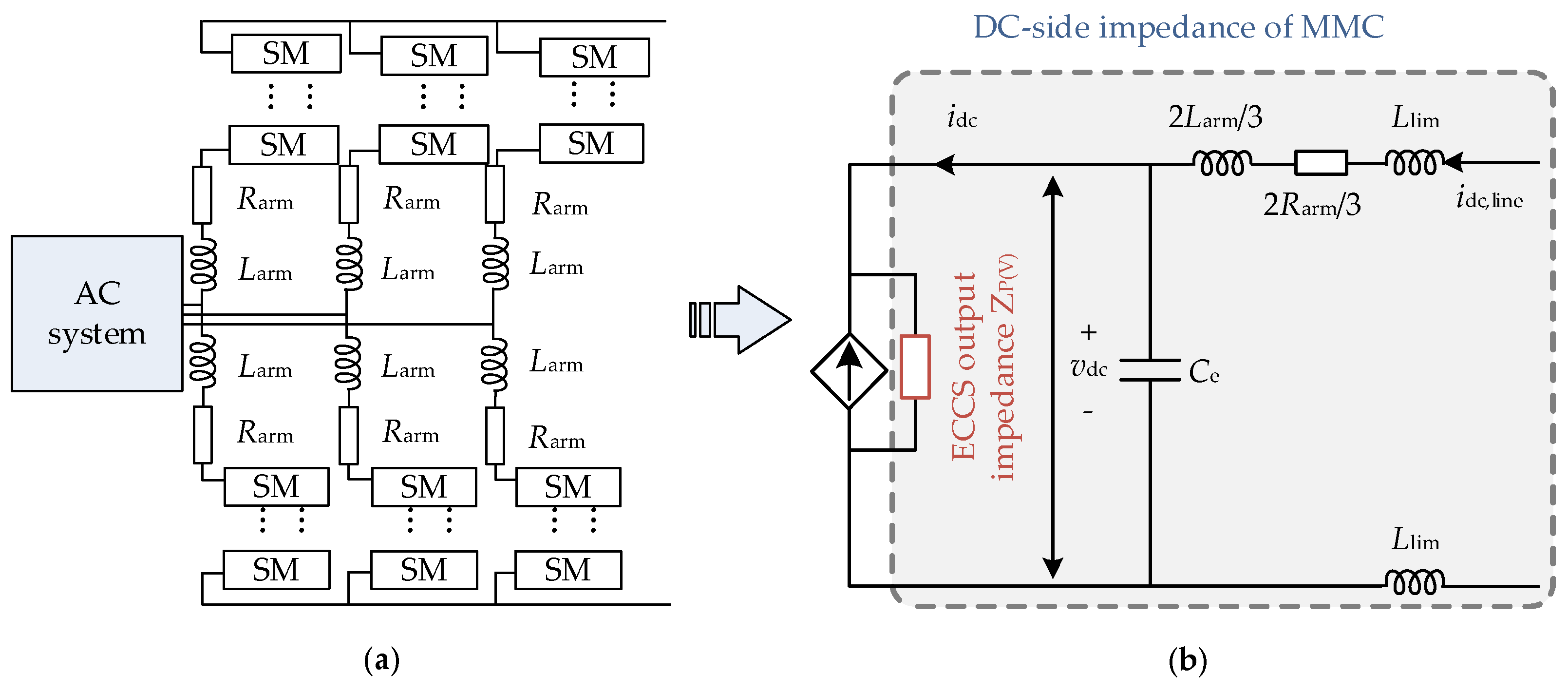
3.1. MMC-MTDC System Structure
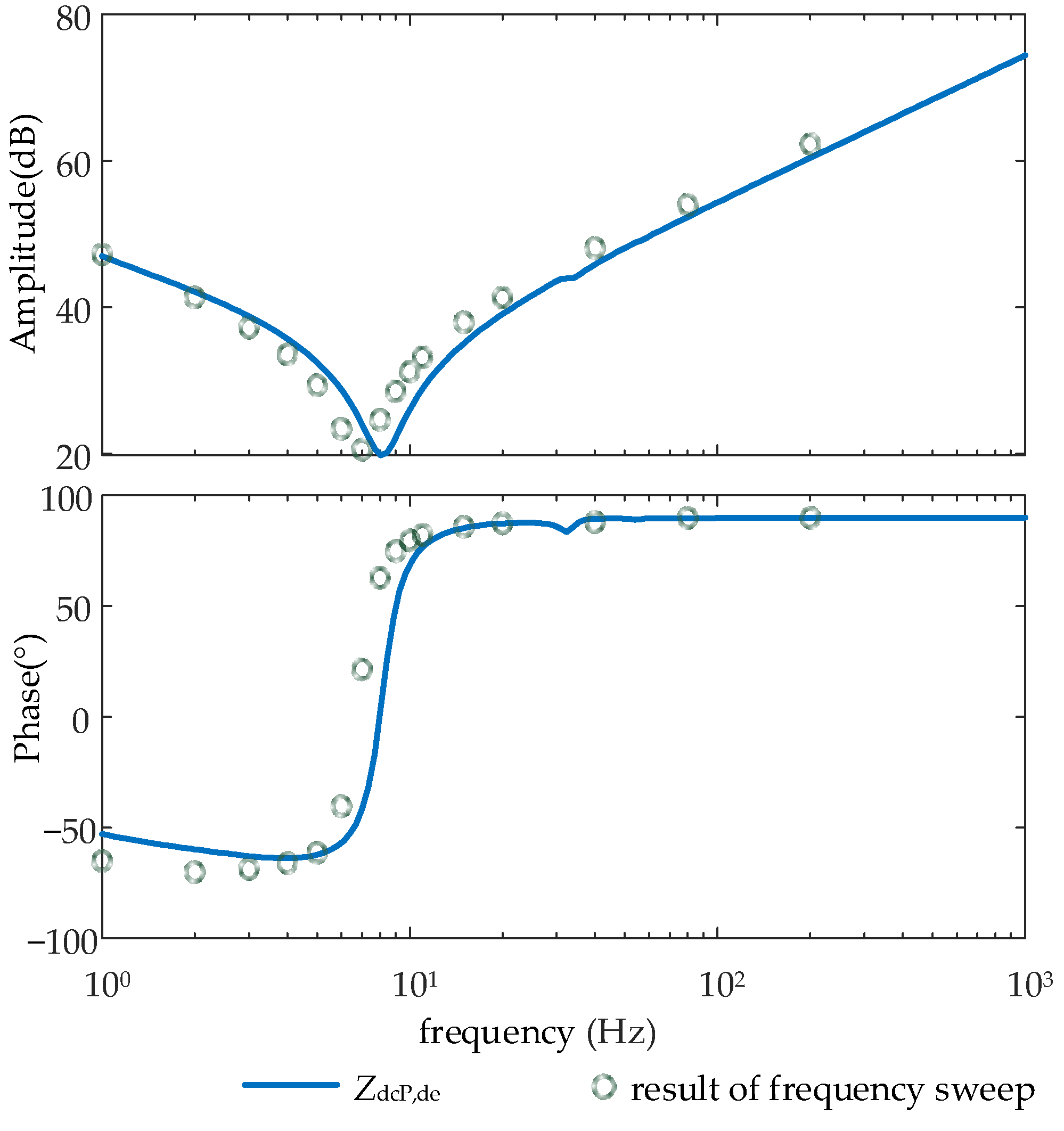
3.2. DC Side Impedance of MMC
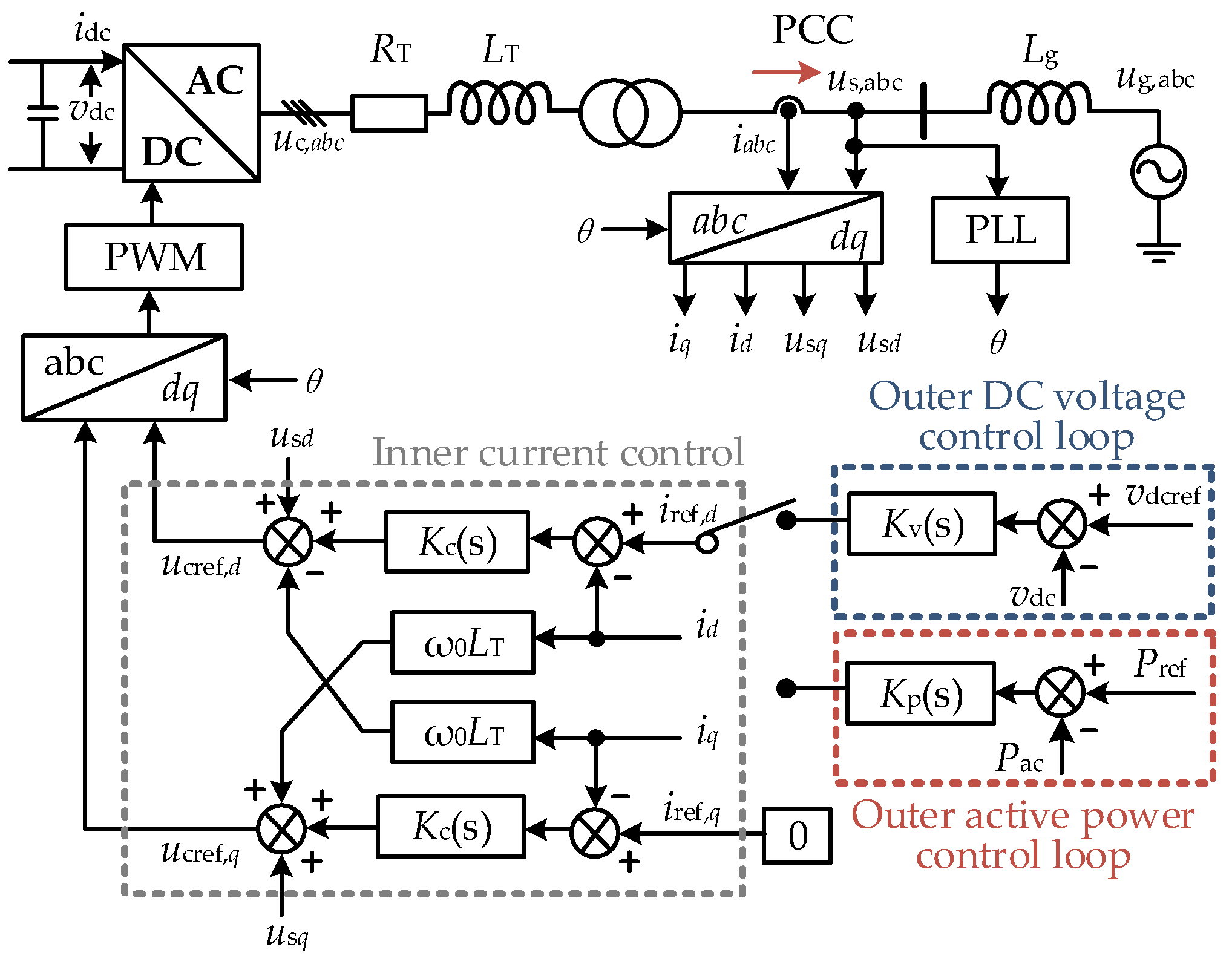
3.3. DC Side Impedance of MMC with Constant Power Control
3.4. DC Side Impedance of MMC with DC Voltage Control and Virtual Inertia Control
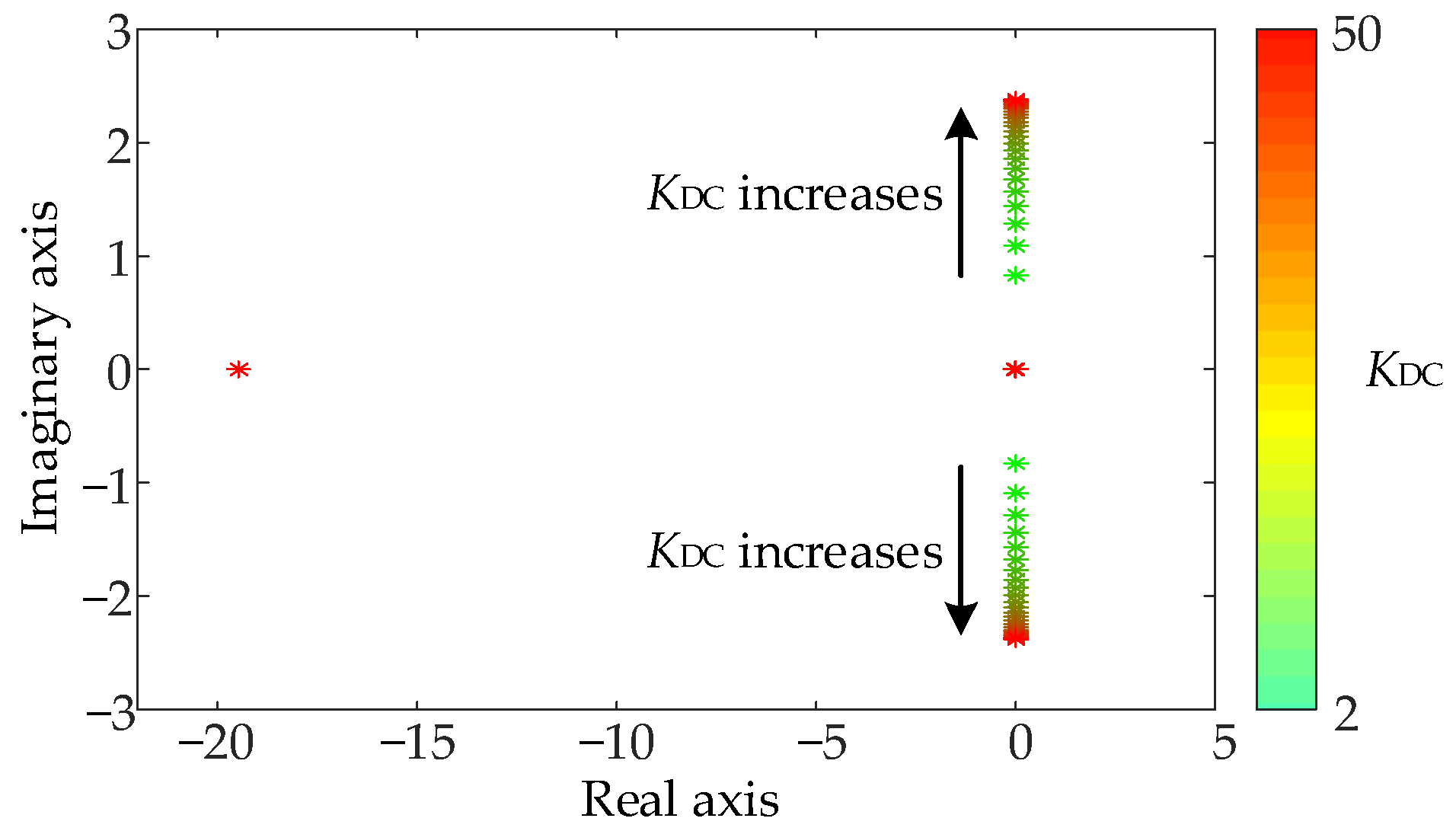
3.5. Impact of Frequency–Voltage Droop Coefficients on the Stability of MMC-MTDC System
4. Simulation Analysis
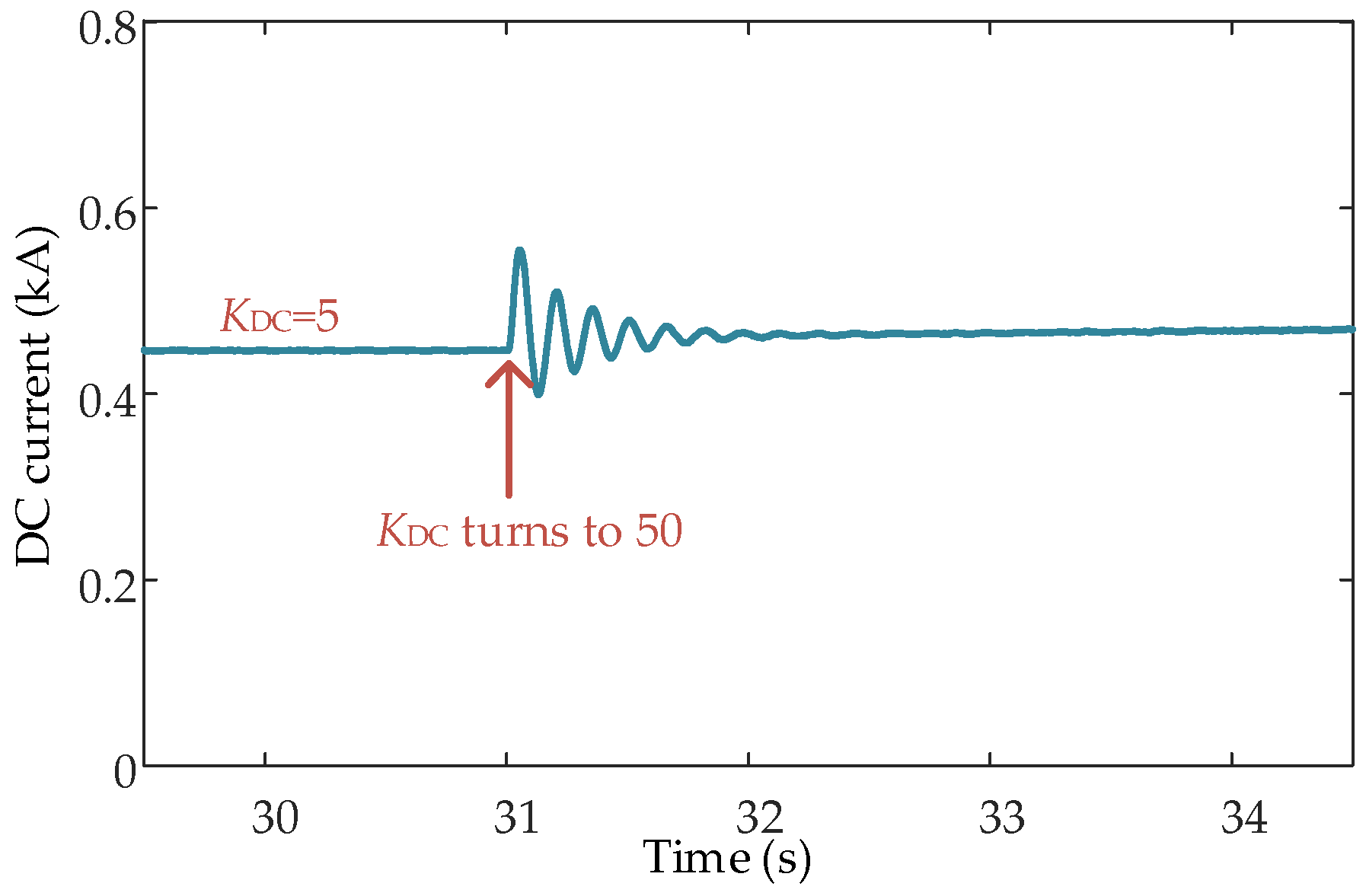
4.1. Verification of Impact of Droop Coefficient on MTDC System Stability
4.2. Validation of Frequency Support Effect of OWF-MTDC
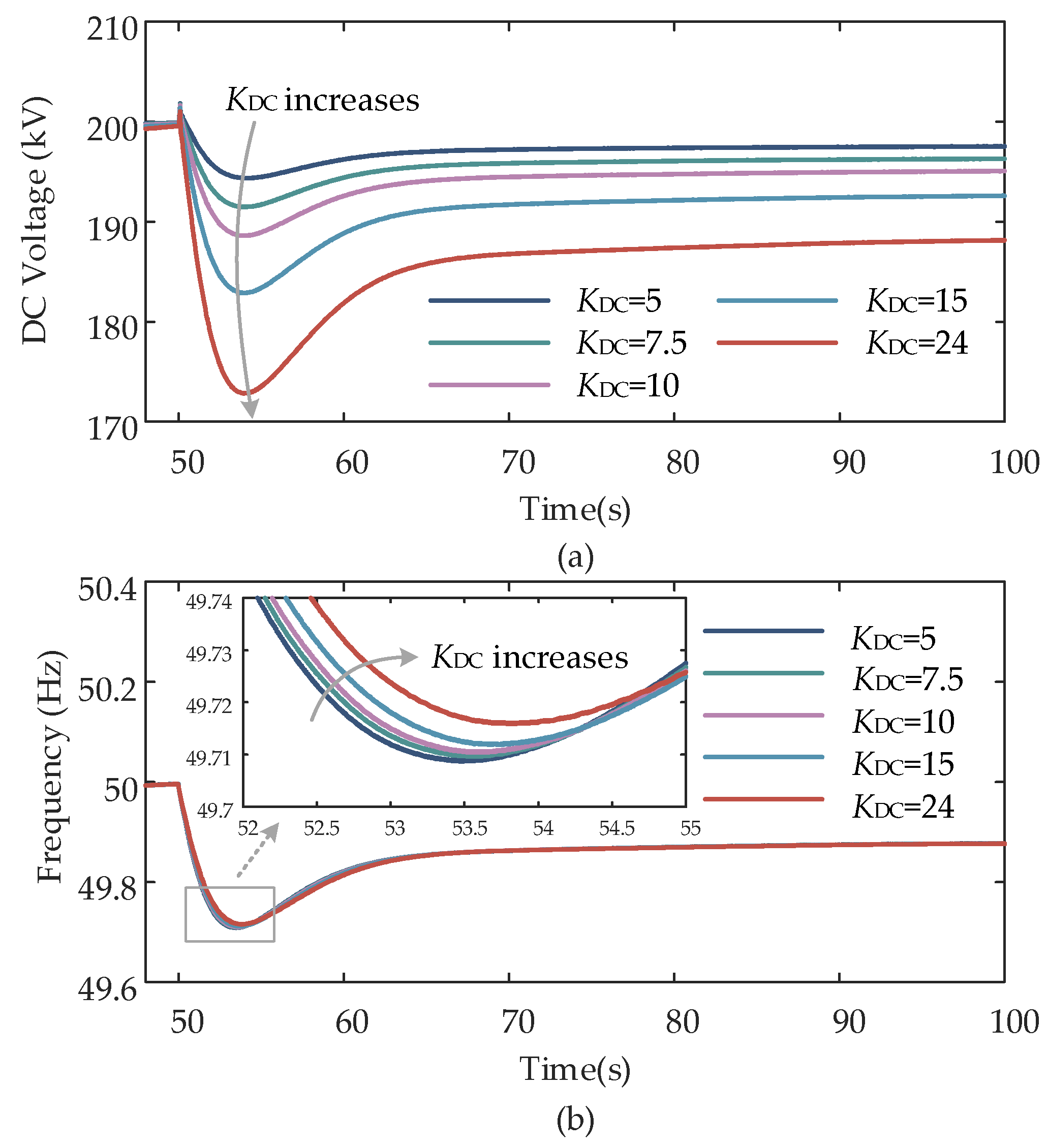
4.3. Simulation Results with Different Frequency–Voltage Droop Coefficients
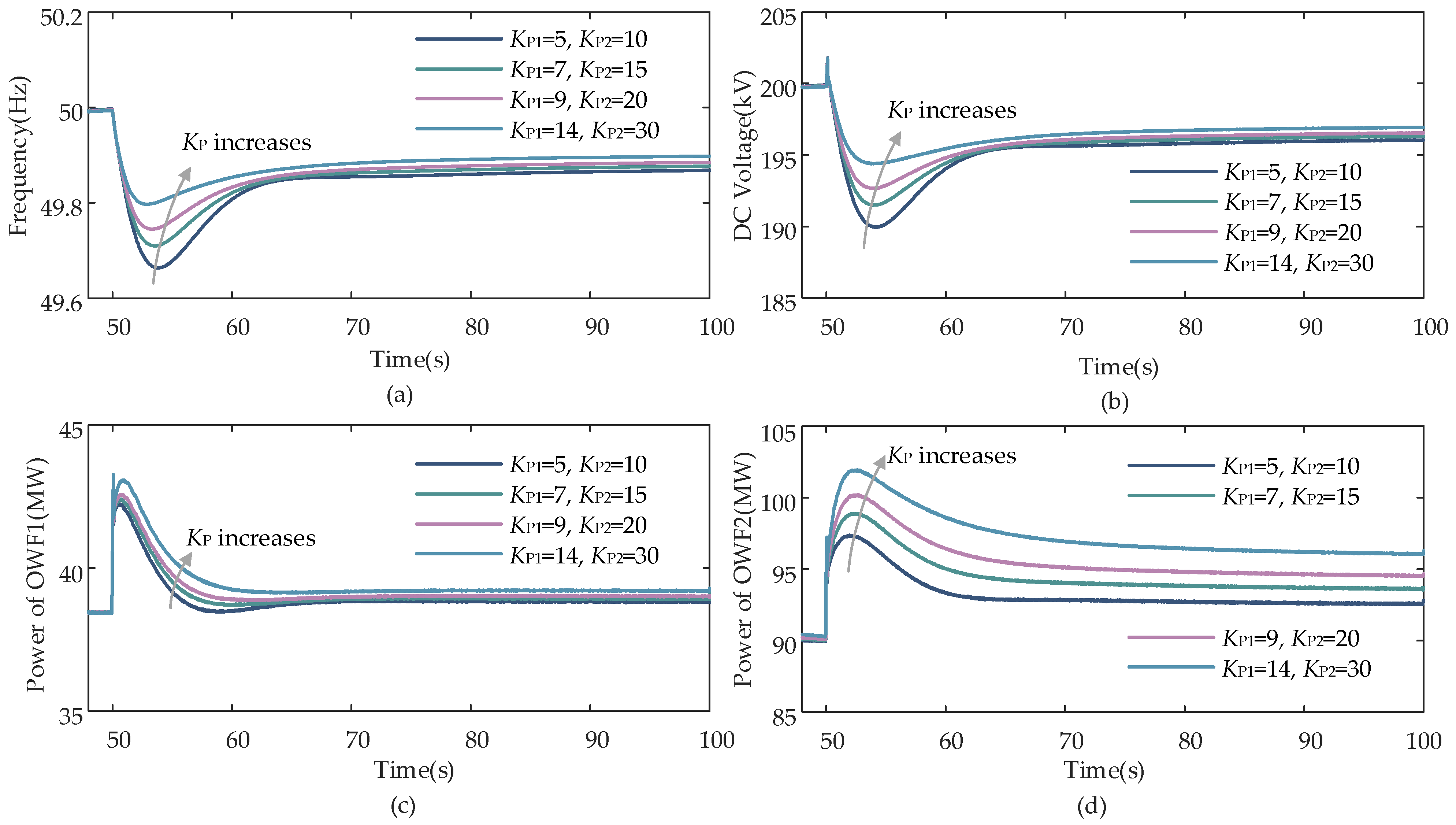
4.4. Simulation Results with Different Power Droop Coefficients
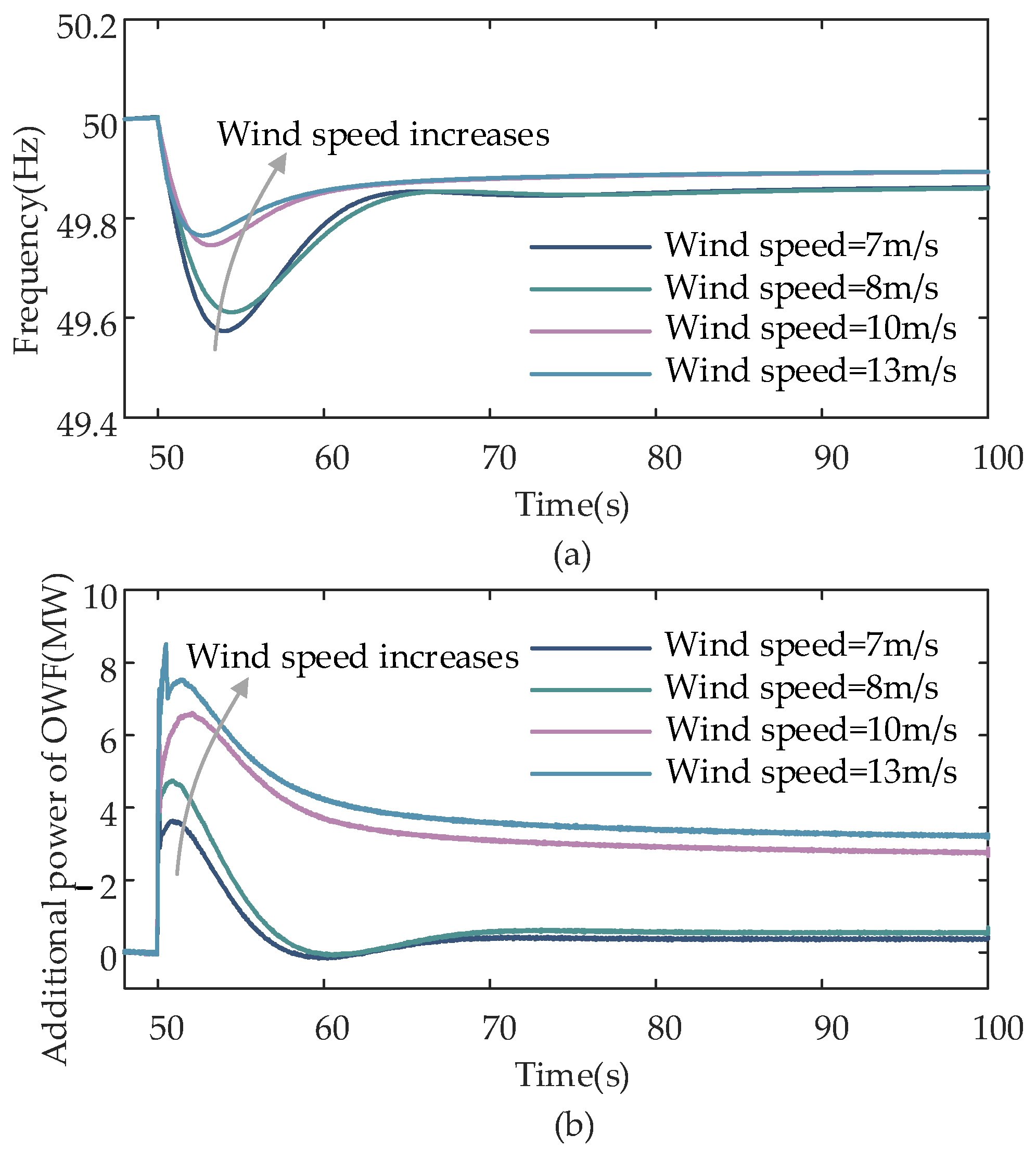
4.5. Simulation Results with Different Wind Speeds
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix B
References
- Wang, W.Y.; Li, Y.; Cao, Y.J.; Hager, U.; Rehtanz, C. Adaptive droop control of VSC-MTDC system for frequency support and power sharing. IEEE Trans. Power Syst. 2018, 33, 1264–1274. [Google Scholar] [CrossRef]
- Peng, Q.; Liu, T.Q.; Wang, S.L.; Qiu, Y.F.; Li, X.Y.; Li, B.H. Determination of droop control coefficient of multi-terminal VSC-HVDC with system stability consideration. IET Renew. Power Gener. 2018, 12, 1508–1515. [Google Scholar] [CrossRef]
- Sun, K.; Yao, W.; Fang, J.K.; Ai, X.M.; Wen, J.Y.; Cheng, S.J. Impedance modeling and stability analysis of grid-connected DFIG-based wind farm with a VSC-HVDC. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 8, 1375–1390. [Google Scholar] [CrossRef]
- Xiong, Y.X.; Yao, W.; Wen, J.F.; Lin, S.Q.; Ai, X.M.; Fang, J.K.; Wen, J.Y.; Cheng, S.J. Two-level combined control scheme of VSC-MTDC integrated offshore wind farms for onshore system frequency support. IEEE Trans. Power Syst. 2021, 36, 781–792. [Google Scholar] [CrossRef]
- Wang, Y.; Nguyen, T.L.; Xu, Y.; Li, Z.M.; Tran, Q.-T.; Caire, R. Cyber-physical design and implementation of distributed event-triggered secondary control in islanded microgrids. IEEE Trans. Ind. Appl. 2019, 55, 5631–5642. [Google Scholar] [CrossRef]
- Li, Y.S.; Zhang, H.G.; Liang, X.D.; Huang, B.N. Event-triggered-based distributed cooperative energy management for multienergy systems. IEEE Trans. Ind. Inform. 2019, 15, 2008–2022. [Google Scholar] [CrossRef]
- Guan, M.Y. Scheduled power control and autonomous energy control of grid-connected energy storage system (ESS) with virtual synchronous generator and primary frequency regulation capabilities. IEEE Trans. Power Syst. 2022, 37, 942–954. [Google Scholar] [CrossRef]
- Li, Z.; Wei, Z.A.; Zhan, R.P.; Li, Y.Z.; Tang, Y.; Zhang, X.-P. Frequency support control method for interconnected power systems using VSC-MTDC. IEEE Trans. Power Syst. 2021, 36, 2304–2313. [Google Scholar] [CrossRef]
- Xu, B.; Zhang, L.W.; Yao, Y.; Yu, X.D.; Yang, Y.X.; Li, D.D. Virtual inertia coordinated allocation method considering inertia demand and wind turbine inertia response capability. Energies 2021, 14, 5002. [Google Scholar] [CrossRef]
- Jiang, Q.; Zeng, X.Y.; Li, B.H.; Wang, S.L.; Liu, T.Q.; Chen, Z.; Wang, T.X.; Zhang, M. Time-sharing frequency coordinated control strategy for PMSG-based wind turbine. IEEE J. Emerg. Sel. Topics Circuits Syst. 2022, 12, 268–278. [Google Scholar] [CrossRef]
- Zeng, X.Y.; Liu, T.Q.; Wang, S.L.; Dong, Y.Q.; Li, B.H.; Chen, Z. Coordinated control of MMC-HVDC system with offshore wind farm for providing emulated inertia support. IET Renew. Power Gener. 2020, 14, 673–683. [Google Scholar] [CrossRef]
- Xiong, Y.X.; Yao, W.; Yao, Y.H.; Fang, J.K.; Ai, X.M.; Wen, J.Y.; Cheng, S.J. Distributed cooperative control of offshore wind farms integrated via MTDC system for fast frequency support. IEEE Trans. Ind. Electron. 2023, 70, 4693–4704. [Google Scholar] [CrossRef]
- Kheshti, M.; Lin, S.Y.; Zhao, X.W.; Ding, L.; Yin, M.H.; Terzija, V. Gaussian distribution-based inertial control of wind turbine generators for fast frequency response in low inertia systems. IEEE Trans. Sustain. Energy 2022, 13, 1641–1653. [Google Scholar] [CrossRef]
- Tu, G.G.; Li, Y.J.; Xiang, J. Coordinated rotor speed and pitch angle control of wind turbines for accurate and efficient frequency response. IEEE Trans. Power Syst. 2022, 37, 3566–3576. [Google Scholar] [CrossRef]
- Wang, X.; He, Y.G.; Gao, D.W.; Wang, Z.Y.; Muljadi, E. Cooperative output regulation of large-scale wind turbines for power reserve control. IEEE Trans. Energy Convers. 2023, 38, 1166–1177. [Google Scholar] [CrossRef]
- Ge, X.L.; Zhu, X.H.; Fu, Y.; Xu, Y.S.; Huang, L.L. Optimization of reserve with different time scales for wind-thermal power optimal scheduling considering dynamic deloading of wind turbines. IEEE Trans. Sustain. Energy 2022, 13, 2041–2050. [Google Scholar] [CrossRef]
- Peng, Q.; Jiang, Q.; Yang, Y.H.; Liu, T.Q.; Wang, H.; Blaabjerg, F. On the stability of power electronics-dominated systems: Challenges and potential solutions. IEEE Trans. Ind. Appl. 2019, 55, 7657–7670. [Google Scholar] [CrossRef]
- Kou, P.; Liang, D.L.; Wu, Z.H.; Ze, Q.J.; Gao, L. Frequency support from a DC-grid offshore wind farm connected through an HVDC link: A communication-free approach. IEEE Trans. Energy Convers. 2018, 33, 1297–1310. [Google Scholar] [CrossRef]
- Peng, Q.; Fang, J.Y.; Yang, Y.H.; Liu, T.Q.; Blaabjerg, F. Maximum virtual inertia from DC-link capacitors considering system stability at voltage control timescale. IEEE J. Emerg. Sel. Topics Circuits Syst. 2021, 11, 79–89. [Google Scholar] [CrossRef]
- Xu, Z.G.; Li, B.B.; Han, L.J.; Hu, J.L.; Wang, S.B.; Zhang, S.G.; Xu, D.G. A complete HSS-based impedance model of MMC considering grid impedance coupling. IEEE Trans. Power Electron. 2020, 35, 12929–12948. [Google Scholar] [CrossRef]
- Hu, J.B.; Zhu, J.H.; Wan, M. Modeling and analysis of modular multilevel converter in DC voltage control timescale. IEEE Trans. Ind. Electron. 2019, 66, 6449–6459. [Google Scholar] [CrossRef]
- Lyu, J.; Zhang, X.; Cai, X.; Molinas, M. Harmonic state-space based small-signal impedance modeling of a modular multilevel converter with consideration of internal harmonic dynamics. IEEE Trans. Power Electron. 2019, 34, 2134–2148. [Google Scholar] [CrossRef] [Green Version]
- Lyu, J.; Zhang, X.; Huang, J.J.; Zhang, J.W.; Cai, X. Comparison of harmonic linearization and harmonic state space methods for impedance modeling of modular multilevel converter. In Proceedings of the 2018 International Power Electronics Conference (IPEC), Niigata, Japan, 20–24 May 2018; pp. 1004–1009. [Google Scholar]
- Li, C.; Cao, Y.J.; Yang, Y.Q.; Wang, L.; Blaabjerg, F.; Dragicevic, T. Impedance-based method for DC stability of VSC-HVDC system with VSG control. Int. J. Electr. Power Energy Syst. 2021, 130, 106975. [Google Scholar] [CrossRef]
- Agbemuko, A.J.; Domínguez-García, J.L.; Prieto-Araujo, E.; Gomis-Bellmunt, O. Impedance modelling and parametric sensitivity of a VSC-HVDC system: New insights on resonances and interactions. Energies 2018, 11, 845. [Google Scholar] [CrossRef] [Green Version]
- Amin, M.; Molinas, M.; Lyu, J.; Cai, X. Impact of power flow direction on the stability of VSC-HVDC seen from the impedance nyquist plot. IEEE Trans. Power Electron. 2017, 32, 8204–8217. [Google Scholar] [CrossRef]
- Paul, S.; Rather, Z.H. A novel approach for optimal cabling and determination of suitable topology of MTDC connected offshore wind farm cluster. Electr. Power Syst. Res. 2022, 208, 107877. [Google Scholar] [CrossRef]
- Li, Y.J.; Xu, Z.; Zhang, J.L.; Yang, H.M.; Wong, K.P. Variable utilization-level scheme for load-sharing control of wind farm. IEEE Trans. Energy Convers. 2018, 33, 856–868. [Google Scholar] [CrossRef]
- Dreidy, M.; Mokhlis, H.; Mekhilef, S. Inertia response and frequency control techniques for renewable energy sources: A review. Renew. Sust. Energ. Rev. 2017, 69, 144–155. [Google Scholar] [CrossRef]
- Huang, H.; Ju, P.; Jin, Y.; Yuan, X.; Qin, C.; Pan, X.; Zang, X. Generic system frequency response model for power grids with different generations. IEEE Access 2020, 8, 14314–14321. [Google Scholar] [CrossRef]
- Zhu, J.B.; Hu, J.B.; Huang, W.; Wang, C.S.; Zhang, X.; Bu, S.Q.; Li, Q.; Urdal, H.; Booth, C.D. Synthetic inertia control strategy for doubly fed induction generator wind turbine generators using lithium-ion supercapacitors. IEEE Trans. Energy Convers. 2018, 33, 773–783. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Transformer load loss | 0.006 pu |
| Transformer leakage reactance | 0.18 pu |
| Number of submodules N | 200 |
| Submodule capacitance Csub | 15 mF |
| Line equivalent resistance R12 | 0.25 Ω |
| Line equivalent inductance L12 | 2.5 mH |
| Line equivalent resistance R23 | 0.5 Ω |
| Line equivalent inductance L23 | 5 mH |
| Line equivalent resistance R34 | 0.4 Ω |
| Line equivalent inductance L34 | 4 mH |
| Current limiting inductor Llim | 0.2 H |
| Arm resistance Rarm | 0.15 Ω |
| Arm inductance Larm | 30 mH |
| Parameter | Value |
|---|---|
| Frequency droop coefficient KDC | 0.18 pu |
| PI transfer function of power outer loop Kp(s) | 200 |
| PI transfer function of current inner loop Kc(s) | 15 mF |
| PI transfer function of voltage outer loop Kv(s) | 0.25 Ω |
| Rated DC voltage vdc0 | 2.5 mH |
| Parameter | Value |
|---|---|
| Rated power SWT | 2 MW |
| Number of WTGSs in a single OWF | 50 |
| Rated frequency fN | 50 Hz |
| Terminal voltage | 0.69 kV |
| Rated rotor speed ω | 1.2 pu |
| Power reserve coefficient d% | 10% |
| Wind speed of OWF1 | 8 m/s |
| Wind speed of OWF2 | 13 m/s |
| Virtual inertia of OWF1 H1 | 5 s |
| Virtual inertia of OWF2 H2 | 7 s |
| Power droop coefficient of OWF1 KP1 | 7 |
| Power droop coefficient of OWF2 KP2 | 15 |
| Parameter | Value |
|---|---|
| Rated power of G1 SG1 | 72 MW |
| Rated power of G2 SG2 | 163 MW |
| Rated power of G3 SG3 | 85 MW |
| Inertia time constant of G1 HG1 | 8 s |
| Inertia time constant of G2 HG2 | 6.4 s |
| Inertia time constant of G3 HG3 | 3.01 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, H.; Li, Q.; Li, Q. Frequency Support Control of Multi-Terminal Direct Current System Integrated Offshore Wind Farms Considering Direct Current Side Stability. Electronics 2023, 12, 3029. https://doi.org/10.3390/electronics12143029
Han H, Li Q, Li Q. Frequency Support Control of Multi-Terminal Direct Current System Integrated Offshore Wind Farms Considering Direct Current Side Stability. Electronics. 2023; 12(14):3029. https://doi.org/10.3390/electronics12143029
Chicago/Turabian StyleHan, Huachun, Qun Li, and Qiang Li. 2023. "Frequency Support Control of Multi-Terminal Direct Current System Integrated Offshore Wind Farms Considering Direct Current Side Stability" Electronics 12, no. 14: 3029. https://doi.org/10.3390/electronics12143029