1. Introduction
A way to achieve miniaturization and low power consumption in an electronics system is to use monolithic integration technology and flexible printed circuit board (PCB) technology. PCB is the carrier for the electrical interconnection of electronic components, the quality of which plays a significant role in sensors, magnetorquers, gyroscopes of microsystems and nano satellites. Thus, PCB defect detection is crucial for ensuring the safety performance and survival time of electronic systems. Their manufacturing process produces cosmetic and functional defects [
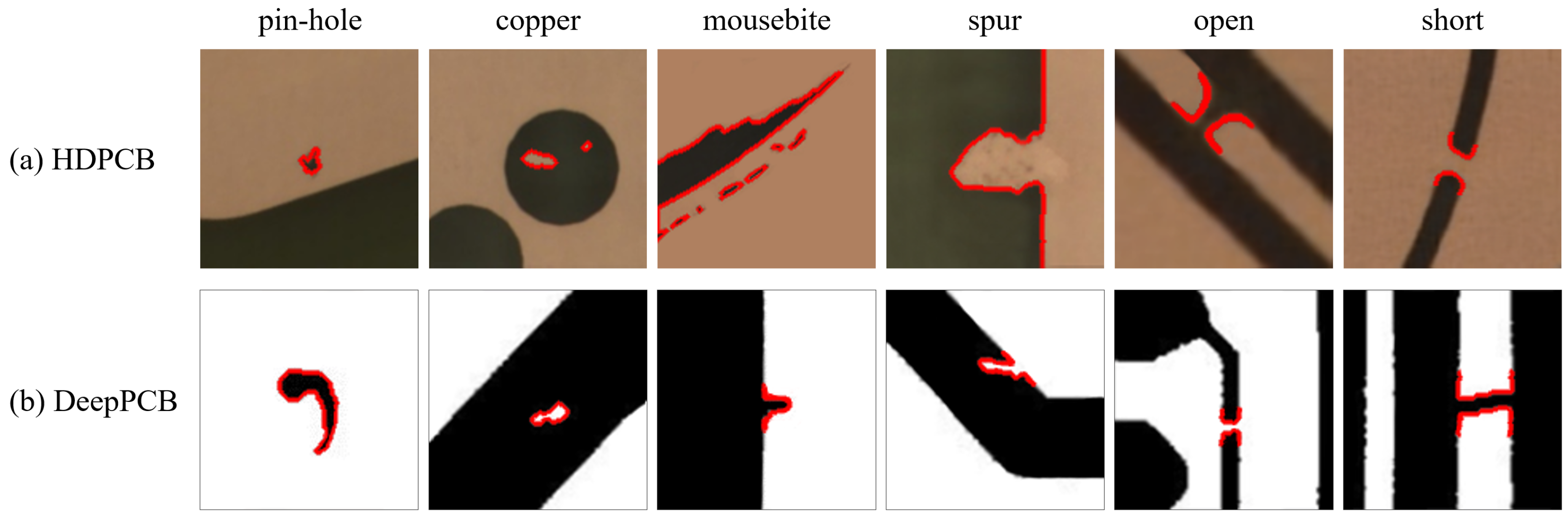
1]. The latter may pose serious effects on the circuit’s performance. Thus, it is of significance to detect those defects for ensuring the reliability and safety of electronic products. The six major functional PCB defects, including pin-hole, copper, mousebite, spur, open circuit and short circuit, are presented in our HDPCB dataset as well as on the DeepPCB dataset [
2], as shown in
Figure 1. The red lines sketch the edge of defects, which are also the detection results of this work. Among the conventional PCB inspection methods, manual inspection is inefficient and prone to false detection, while contact-based electrical testing [
3] may cause damage to the PCB. Thus, these methods have been replaced by non-contact automatic optical inspection (AOI) methods, which are based on images and use image processing algorithms to detect defects. We observe that functional defects can be regarded as shape or contour differences between the actual and the ideal circuit structure in images, resulting from the increase or decrease of copper material on PCB. Therefore, this work mainly aims at solving the defect localization problem using important image edge information.
Image-based methods can be mainly divided into two categories: non-reference methods and reference methods [
1]. The latter can achieve more accurate defect detection but have strict requirements for image alignment. Non-reference methods, represented by deep learning methods [
2,
4,
5,
6,
7], use algorithms such as the classic object detection [
8,
9,
10] to directly detect defects by training a predictive model to learn the data distribution with a large number of positive or negative data. However, it faces challenges such as the few-shot problem, small object detection and poor interpretability, resulting from the diversity of defects and their unknown and subjective characteristics. Once the standard of defect changes, it needs to train the model again to adjust to the new conditions. Conversely, reference methods can achieve more accurate detection results with more prior information. They compare the test image with a template image to find differences and identify defects. The template image can be either a real defect-free image or a CAD design image. However, the effect of reference methods is highly dependent on image alignment. Thereby, strict image alignment is needed for high defect-detection accuracy.
The existing image-alignment methods can be generally categorized into pixel-based, frequency domain-based and feature-based. Among them, feature-based methods are more mature and widely used. They usually use Scale-Invariant Feature Transform (SIFT) [
11], Speeded-Up Robust Features (SURF) [
12], Oriented FAST and Rotated BRIEF (ORB) [
13] to extract corner points, followed by feature matching and transform estimation. In this work, we use SURF for image alignment because it achieves higher accuracy than ORB while solving the drawbacks of high computational complexity and time consumption of SIFT. SURF finds the feature points by Hessian matrix polarization, then describes the feature points by Haar wavelet, calculates the main direction of the feature points and generates the feature description. It provides excellent performance, ensuring the accuracy of PCB defect detection later.
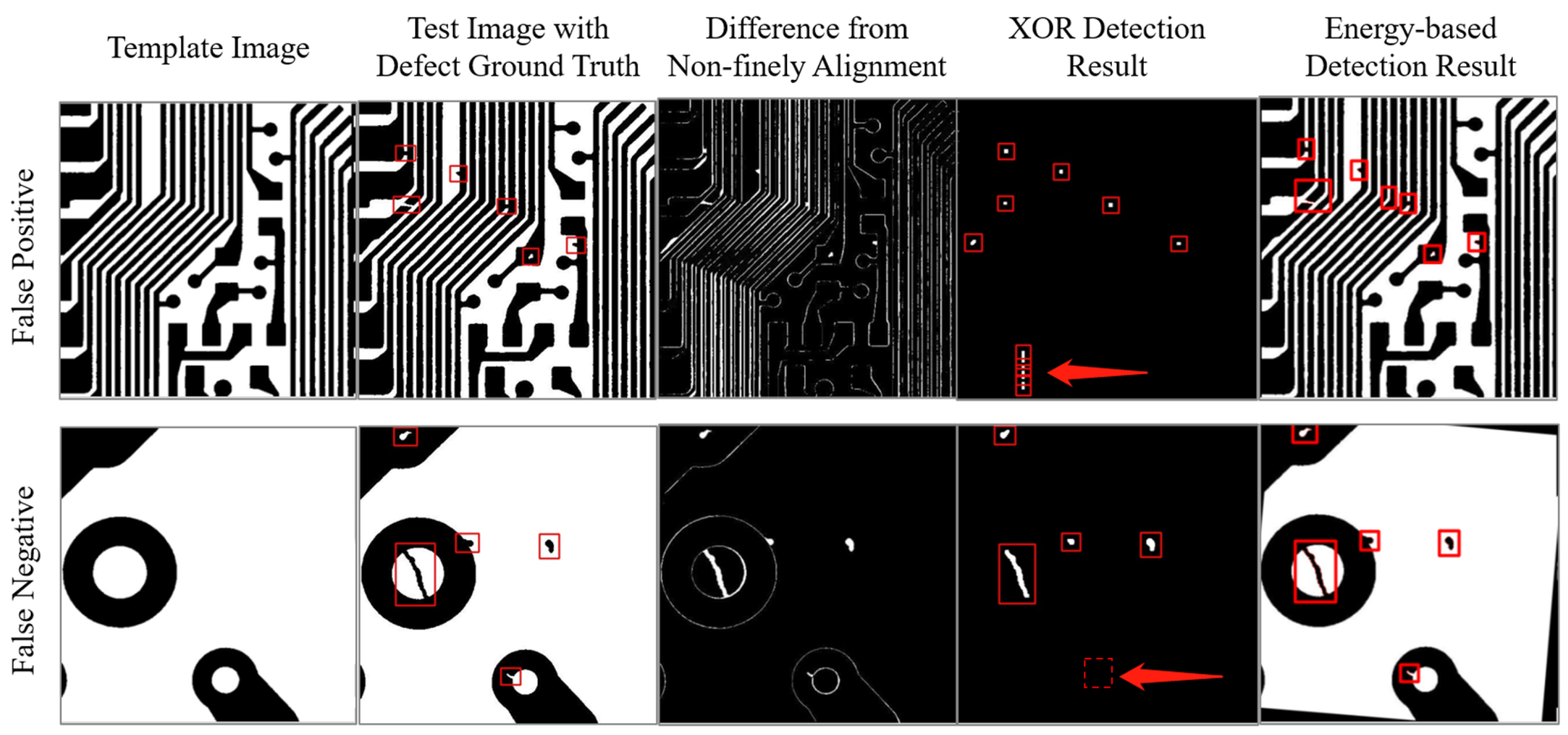
The existing reference-based defect-detection methods cannot address our high-resolution defect image problem well. Conventional defect-detection methods generally find the shape differences between the test image and the template image to locate PCB defects through image subtraction or exclusive OR (XOR) method. However, these methods rely on strict image alignment, making them vulnerable to the following conditions and having poor robustness: (1) images that are not strictly aligned, (2) subtle production deviations and (3) edge spurs caused by image segmentation. We found that the functional defects can all be represented as image contour anomalies.
Through observation and analysis, we found that PCB images have salient edge features. More importantly, functional defects can be viewed as contour anomalies, as presented in
Figure 1. Specifically, they are reflected as either deviation in existing contours or contour increase or decrease. Therefore, studying how to use edge information effectively is not only more beneficial for detecting defects, but may also be able to solve the problems caused by edge spurs. However, there are few edge-guided defect-detection methods. An existing method compared the distance sequences of the edges through barycenter calculation and circular correlation to located defects, but the barycenter could easily be influenced by the defect contours, which decrease the detection accuracy.
To leverage the valuable information of the edge, we propose to find an energy expression method to represent the energy of each pixel in the image for similarity measurement between template and test edges. The energy distribution, which we call Energy Map, is obtained from the template edge and then viewed as a standard to measure the error between the test edge and the template edge. It assigns an energy value to any point, where the energy is lowest at the edge and increases as further away from the edge. Thereby, when given any point of the test image, we can obtain its energy value relative to the template image to measure the similarity between the images. The higher the energy value of a point, the higher the anomaly score, and the higher the possibility of being judged as a defect. In this way, with the Energy Map, we can subtly achieve defect detection by measuring the anomaly energy values.
In this study, we propose an edge-guided energy-based high-precision PCB defect-detection method. Firstly, we propose an edge-guided energy transformation module (EET) to calculate the Energy Map of the template image. Secondly, we introduce SURF to align the test image and then sample edge points of the aligned test image. Thirdly, Energy Map is used to assign energy values to the aligned edge points through coordinate corresponding. In this way, the task is transformed into a point cloud energy measurement problem. In this way, we can use the inconsistency between the images, i.e., the energy anomaly region, for defect detection. Finally, we propose an edge-guided energy-based defect-detection module (EEDD) for defect localization. Specifically, the energy-based defect-detection method consists of the basic defect localization method, contour flood fill method and sliding-window contour flood fill method for defect contour refinement.
The proposed energy-based method addresses the challenges above well with the following advantages: the energy-based defect-detection method (1) addresses the problem of diversity and unknown numbers of defects without prior training, which relies on a large amount of annotated data, and in particular, excels in detecting tiny defects thanks to the pixel-by-pixel comparing and (2) is highly interpretable, enabling flexible adjustment of defect criteria according to different production needs, solving the problem of subjectivity in the definition of defects. In this way, it is more resistant to edge spurs and non-finely aligned images.
The main contributions are as follows:
We propose a novel edge-guided energy-based defect-detection framework, which introduces the Energy Map through energy transformation, and then transforms the functional defect-detection problem into a pixel-by-pixel edge point energy anomaly measurement problem;
We propose a novel edge-guided energy-based sliding-window contour flood fill method for robust defect contour refinement;
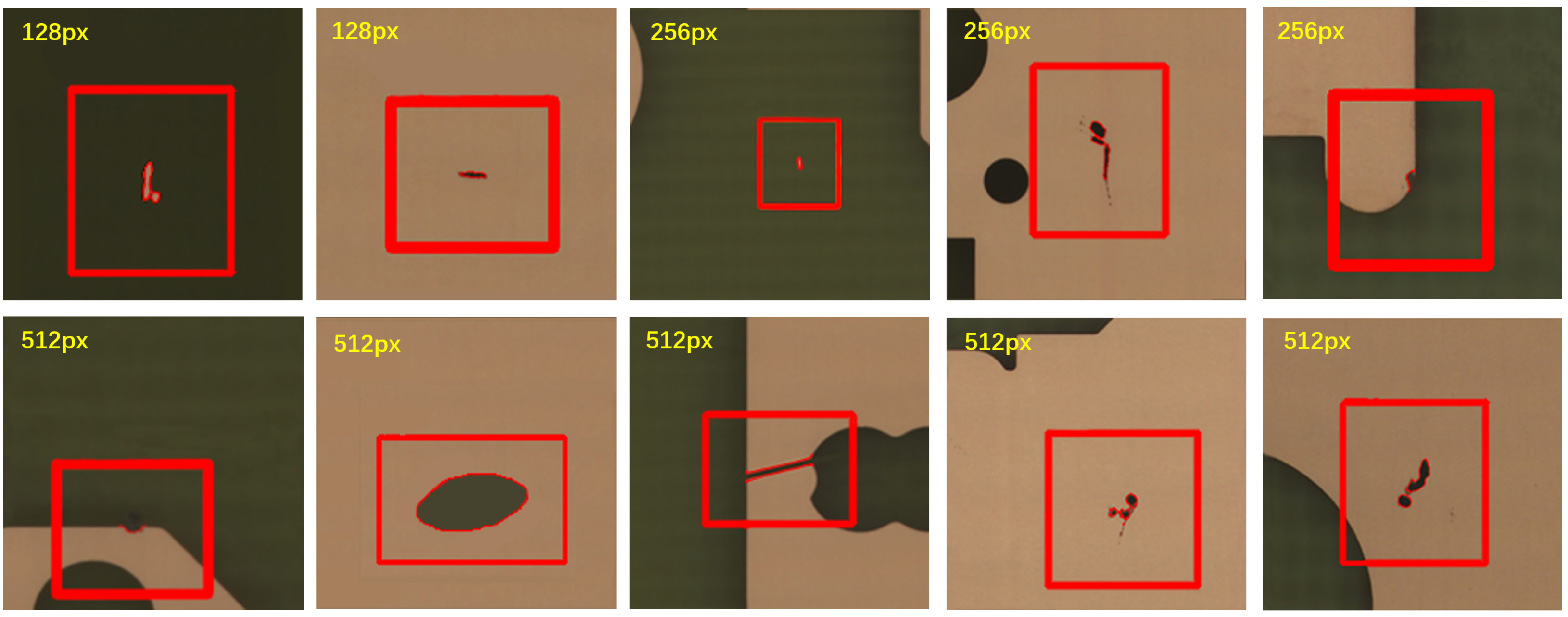
We made augmented synthetic DeepPCB-A datasets through geometric transformation which may cause non-finely aligned interferences for defect detection and realistic high-resolution HDPCB datasets containing multi-scale defects, and experiments verified the effectiveness and robustness of our method.
2. Related Work
Edge-guided Defect Detection. Conventional PCB detection methods are usually more interpretable in comparison to deep learning algorithms. They start by analyzing the causes and forms of defects theoretically, which can better meet the challenge of subjectivity in defect definition. At the feature-extraction level, conventional methods can be divided into three categories: texture-based, color-based and shape-based methods, which are more widely used since PCB images have distinct structural features. These methods commonly use algorithms such as morphological methods, edge detection [
14], Hough transform [
15] and Fourier shape descriptors to describe the boundary characteristics of objects. Most existing PCB defect-detection methods achieve defect localization through subtraction or XOR operations [
1,
16] to find out the shape differences between two images. By analyzing PCB functional defects, we found that they can be further regarded as anomalies of the edge. Unfortunately, we found that there is little research on edge-based defect detection. A method proposed to locate defects by finding the differences between the barycenter-edge points distance sequences of the template and test image using the circular correlation theorem. However, it [
1,
16] relies too heavily on the centroid calculation which can be easily influenced by defect contour points, leading to defect-detection errors and poor anti-interference ability.
Our proposed defect-detection algorithm based on edge-guided template Energy Map. In this way, we avoid the impact of defect contour points on the centroid calculation that leads to transmission errors, thus improving the accuracy and robustness and outperforming conventional methods.
Energy-based Measurement. In this paper, energy is a description of the image similarity, specifically, the error between edges. Distance is one of the effective evaluation metrics to express energy, with which we can easily achieve defect detection through energy measurement. The common distances includes Euclidean distance, Manhattan distance, Chamfer distance, Mahalanobis distance, cosine similarity, etc. Euclidean distance is the most common distance. It measures the straight-line distance between two points in space, which is simple and intuitive. Manhattan distance, also known as city block distance, is the distance between two points along the shortest path of a lattice-like network and is more applicable to path-planning problems. Chamfer distance calculates the distance from each point to its nearest neighbor, accumulates and averages these distances to measure the overall shape difference between two point clouds, which is widely used in point cloud matching, 3D reconstruction tasks. Mahalanobis distance is based on the covariance matrix, which considers the correlation between features and is more suitable for measuring the difference between high-dimensional data. Cosine similarity is used to measure the similarity between vectors by calculating the cosine of the angle between two vectors to measure the similarity between them and is suitable for similarity comparison of high-dimensional data.
In this paper, we focus on the distance between edge points of images. Therefore, Euclidean distance is more applicable to the case. Based on this, we introduce an Euclidean distance transform method, which uses the edge information of the template image to obtain the ideal energy distribution map of all points, thus avoiding the repeated distance calculation when detecting multiple defect images corresponding to the same template and greatly improving the efficiency of industrial detection.
3. Methods
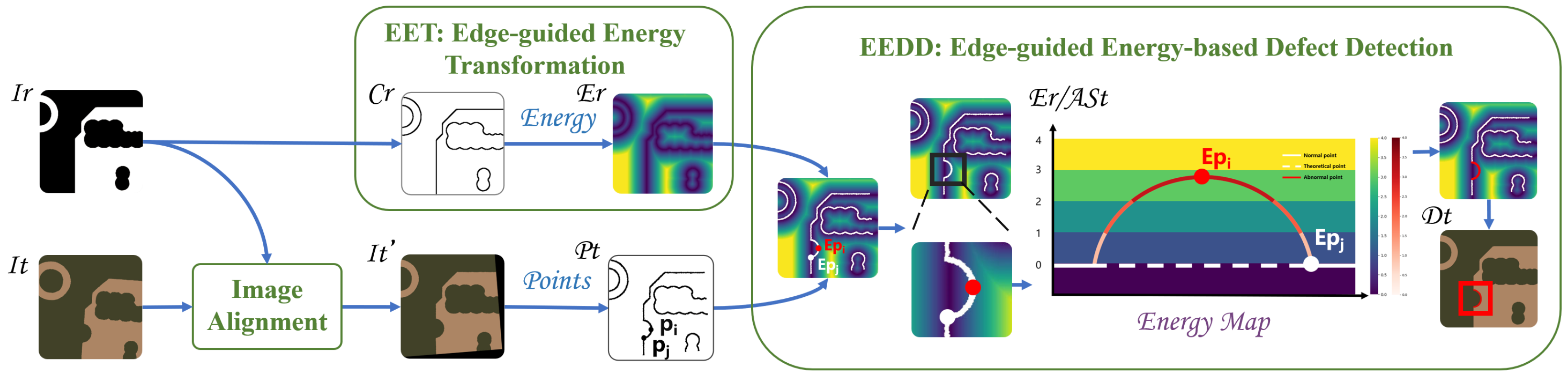
We propose an edge-guided energy-based PCB defect-detection method and the overview is shown in
Figure 2. The process begins with the input of the test image
and a reference template CAD image
. Then, the aligned test image
is obtained through the Image Alignment module. Furthermore, segmentation and edge detection are used to obtain the test contour image and template contour images
.
is then used to calculate the Energy Map
in the Energy Transformation module. Meanwhile, the test edge point cloud
is sampled from the test contour image, and then each point can obtain an energy value from the template Energy Map through coordinate correspondence. Then, in the Energy-based Defect Detection module, the energy value of the target edge point is thresholded for defining anomalies. At this time, the energy value of the template Energy Map
can be viewed as the anomaly score of the target edge point
, which can be used to compare the contour difference pixel by pixel to obtain the defect-localization result of test image
.
This paper proposes a novel edge-guided energy-based PCB defect-detection method, encompassing three modules: Edge-guided Energy Transformation (in
Section 3.1), Image Alignment and Edge-guided Energy-based Defect Detection (in
Section 3.2). In the Image Alignment module, we use SURF since its better alignment performance in both accuracy and operation speed in the defect-detection task. The overview is shown in
Figure 2.
3.1. Edge-Guided Energy Transformation
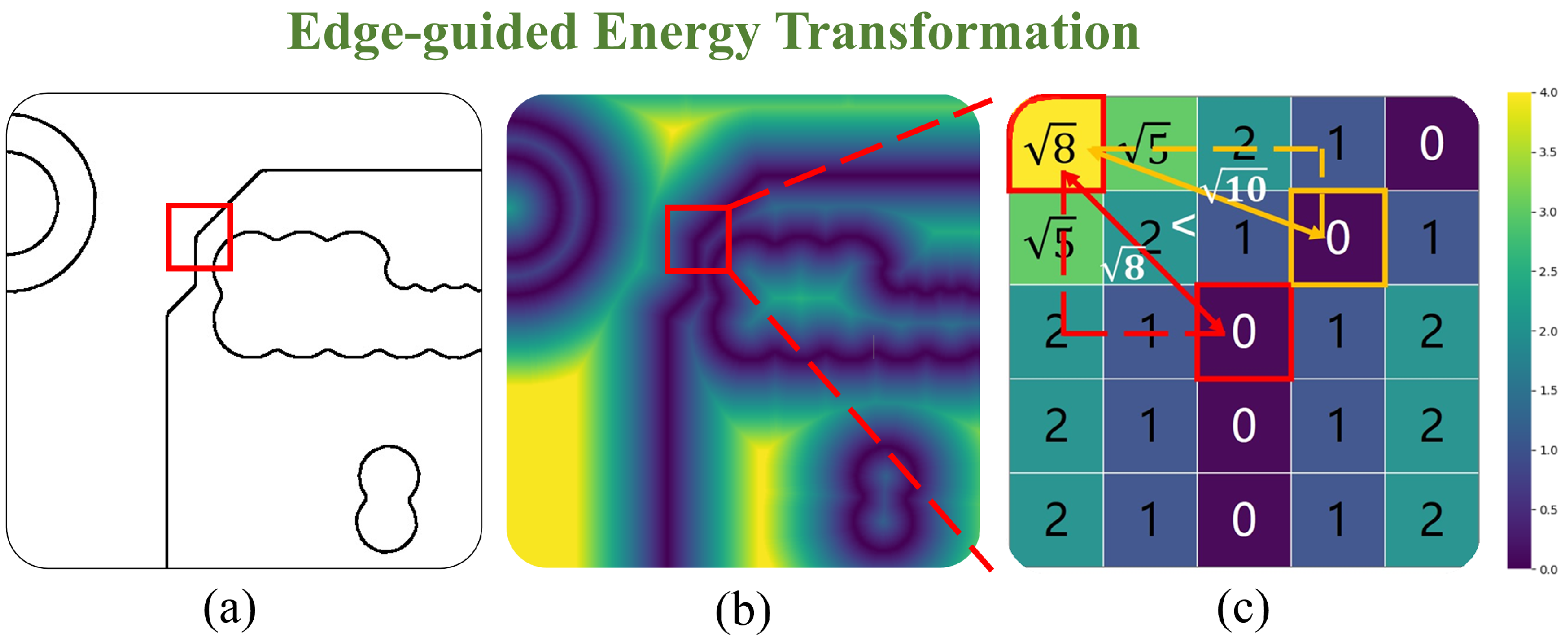
We propose an edge-guided energy transformation method (EET) to represent the energy distribution of points. Then, when given any point of the test image, we can obtain its energy value in the template image through coordinate position to measure the similarity.
We first extract the contours of the input images by semantic segmentation and edge detection [
14], to distinguish all pixels into edge points and flat points. In particular, we found that using Euclidean distance transformation (EDT) [
17], we can achieve the energy transformation subtly and quickly. The distance between any point and the nearest edge point in the template image is calculated through EDT, which we call Energy Map. In this map, any pixel is assigned an energy value. It is noteworthy that distance transformation is one way to represent the Energy Map, which can also be realized using other metrics or transformations. We define the edge points as
e and the remaining flat points as
p. Given the coordinate of any point, we can quickly and easily obtain the corresponding energy value with the Energy Map. The selection of the nearest edge point and the principle of calculating the energy value are shown in
Figure 3. The energy at the edge is zero, as visualized darkest in the image. With increasing distance from the edge, the energy gradually increases and becomes brighter.
Here, we use the Euclidean distance transformation method to calculate the energy value of the arbitrary point. First, we review the one-dimensional distance conversion method. Let
be a one-dimensional grid and
be the grid sampling function. We define the one-dimensional distance transformation of
f as
. In this work, the Euclidean distance is utilized as the metric between edge points
e and flat points
p, denoted as
. The distance transformation aims to find the nearest edge point for any flat point, assigning the flat one an energy value, which is represented by a function
, and then we calculate the distance
from the flat point
p to the corresponding nearest edge point
e. The Euclidean distance transformation of
f is calculated as Equation (
1).
In this paper, we use two-dimensional distance between a flat
point to the nearest edge point
to express the its energy. Then we calculate the two-dimensional distance transform for our edge images under the squared Euclidean distance by Equation (
2).
Since the distance relationship between the two dimensions
x and
y is independent of an image. Therefore, we can obtain the distance transform of the two-dimensional distance transform by first calculating the one-dimensional distance transform of each column of the grid
by Equation (
1) and then calculating the one-dimensional distance transform of each row based on that. In this way, Equation (
2) can be rewritten as Equation (
3).
where
is a one-dimensional distance transform of
f restricted to the column indexed by
x. Thus, the Energy Map, i.e., the distance distribution map, can be obtained by calculating Equation (
4).
here, the Energy Map
E of the template image is derived, which is a significant reference for subsequent defect-detection tasks.
3.2. Edge-Guided Energy-Based Defect Detection
A segment consisting of all adjacent defective points in a contour is called a defective segment
. We first propose a novel edge-guided energy-based defect localization method to find out the fragments
by defining an adjustable threshold in
Section 3.2.1. All the energy values of points in the
exceed the threshold. We do this to solve the problem resulting from the images not being finely aligned. However, it results in a new problem that the defect fragments
may be not the incomplete defect contour. Therefore, we further propose a novel edge-guided energy-based contour flood fill method that enables us to obtain
through
according to the continuity of edge defects in
Section 3.2.2.
3.2.1. Edge-Guided Energy-Based Defect Localization
We found that the functional defects, such as pinhole, copper, mousebite, spur, open circuit, short circuit and other deviations, have distinct edge features, which can be regarded as differences between the target and template contour. To take advantage of this characteristic, this paper proposes an edge-guided energy-based defect-detection method (EEDD) based on the energy-based alignment result. The method transforms functional defects localization into a point cloud energy anomaly measuring problem by energy thresholding.
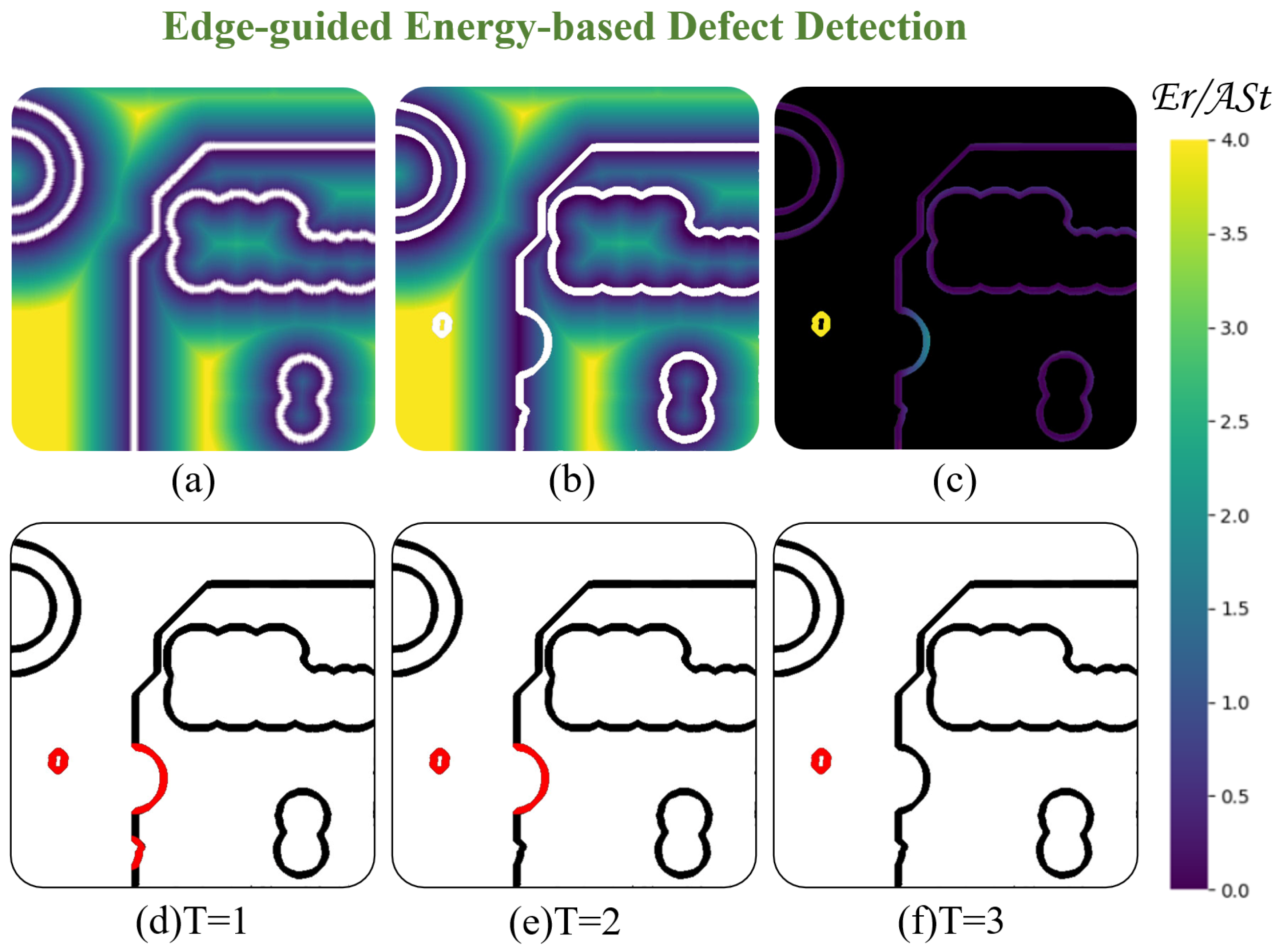
The innovation of our algorithm is using the energy measuring method to replace the conventional subtraction and exclusive OR (XOR) detection method. The core concept is depicted in
Figure 4. We propose to further localize the defects based on the energy values of the transformed point cloud obtained from the energy-based alignment outcome, where most energy values have been decreased to zero. By defining a threshold value to confirm whether a point belongs to a defect, the energy value in the template Energy Map
can be considered to be the anomaly score of the target contour point
. The higher the energy value of a point, the higher the abnormal score, and the higher the possibility of being judged as a defect. If the anomaly score exceeds a certain value or falls within a specific range according to a specific standard, the pixel can be considered one point of a defect. The proposed method is highly interpretable, as shown in
Figure 4. By adjusting the energy threshold
T, it is easy and flexible to fine-tune and adjust different industrial standards and production requirements. Setting threshold value enables our approach to overcome issues such as image misalignment or edge spur resulting from the production process or image pre-processing, and finally achieve higher accuracy and stronger robustness.
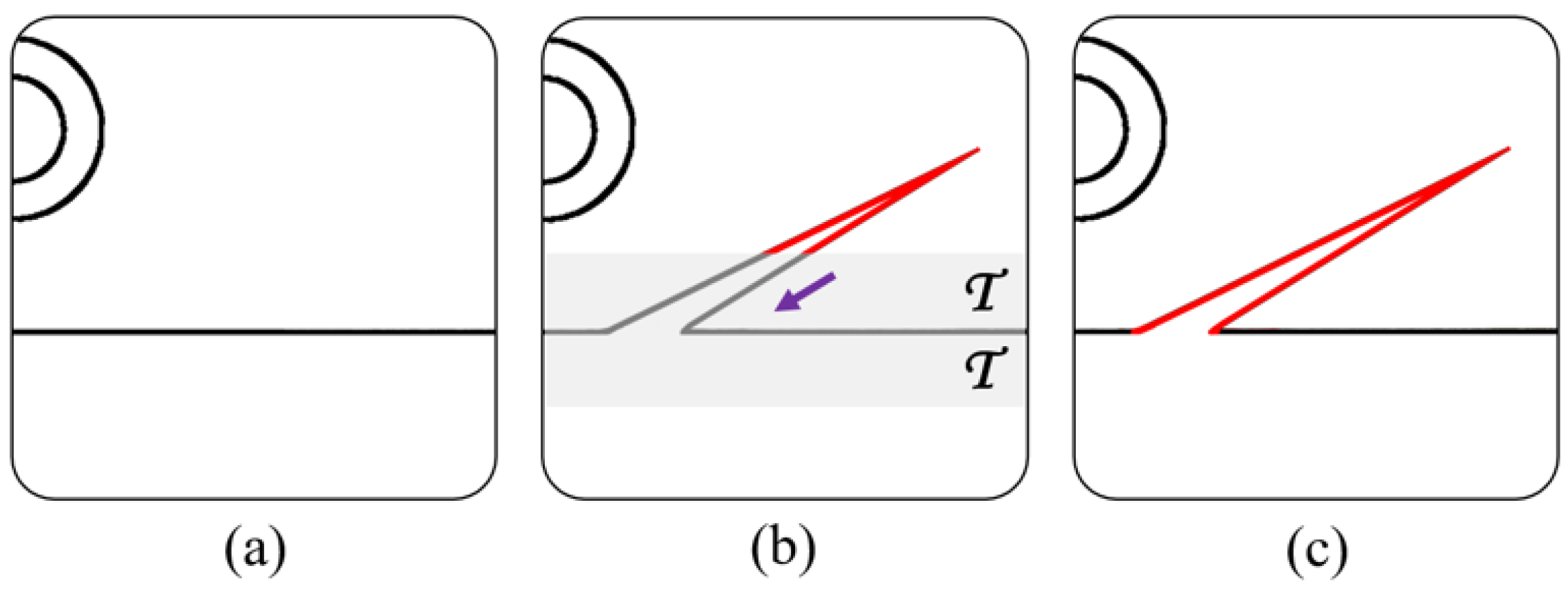
3.2.2. Edge-Guided Energy-Based Contour Flood Fill Method for Defect Refinement
We obtain a subset of the complete defect contour points, the energy values of which are greater than a threshold T by the energy-based defect localization method in
Section 3.2.1, as shown in
Figure 5b.
The principle of the proposed edge flood fill method is as follows. The point with the highest energy on the defect fragment
is taken as the starting point, i.e., the seed point, and then backtrack along the contour to both ends. During the backtracking process, the energy value of the flooding point, i.e., the growing point, is expected to decrease gradually until it no longer decreases. At that point, we obtain the complete defect fragment
, as shown in
Figure 5c. Our proposed one-dimensional flooding method is expressed by Equation (
5).
where
denotes the probability of the current contour point
n that is included in the defect fragment. When the energy value of the current contour point
is less than that of the previous contour point
, it indicates that the current point
n is a defect point, i.e., the probability is 1. When the energy of the current contour point
is equal to the energy of the previous contour point
, it means that the current point is not a defect point, i.e., the probability is 0.
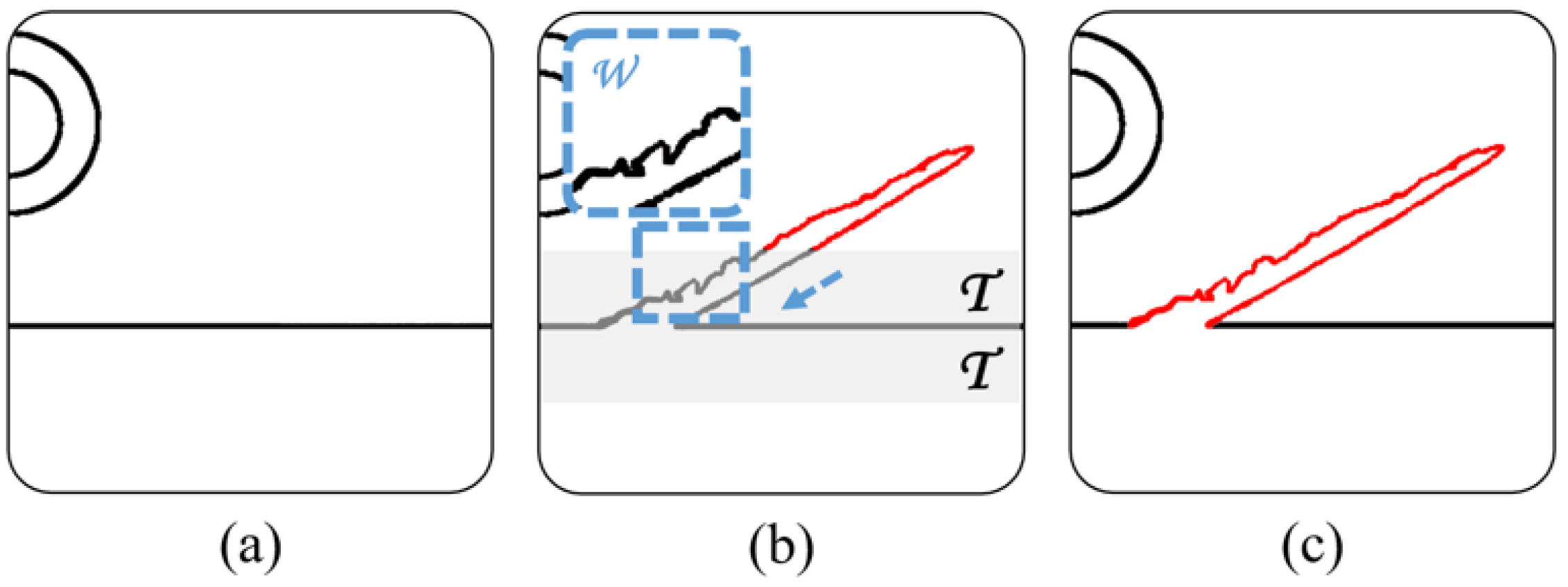
However, in practice, defects are often irregular. The overall change trend of energy during defect contour retracing is decreasing, but the energy between consecutive points is not strictly monotonically varying; it may fall and rise at times. Therefore, we propose the concept of a sliding window, as shown in
Figure 6b. If the overall trend is decreasing within a window, the flooding operation is continued until it tends to be stable. Then finally we obtain the complete defect contour, as shown in
Figure 6c.
If the energy of the current point
in the flooding process is lower than the energy value of a point
that occurs before a step length
s along the traceback path, we could consider the energy trend is still decreased. In this way, the current point is considered a defective point, i.e., its probability
of being judged as defective is 1, which can be expressed as Equation (
6).

 ,
, 








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}