
Research on Sun-Oriented Spin-Stabilized Attitude Control of Micro/Nano Satellite Using Only Magnetic Control


Abstract
:1. Introduction
2. Problem Formulation
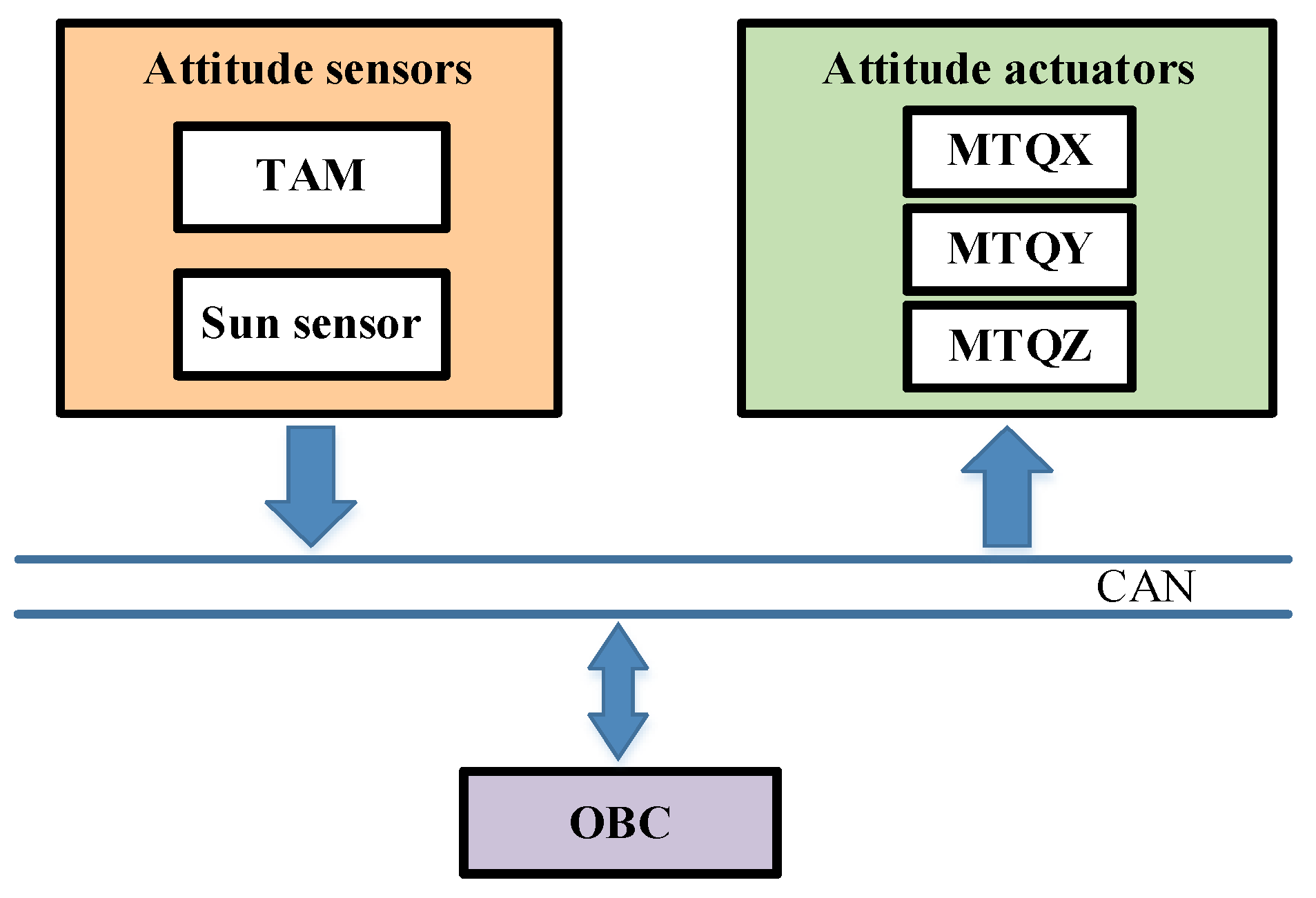
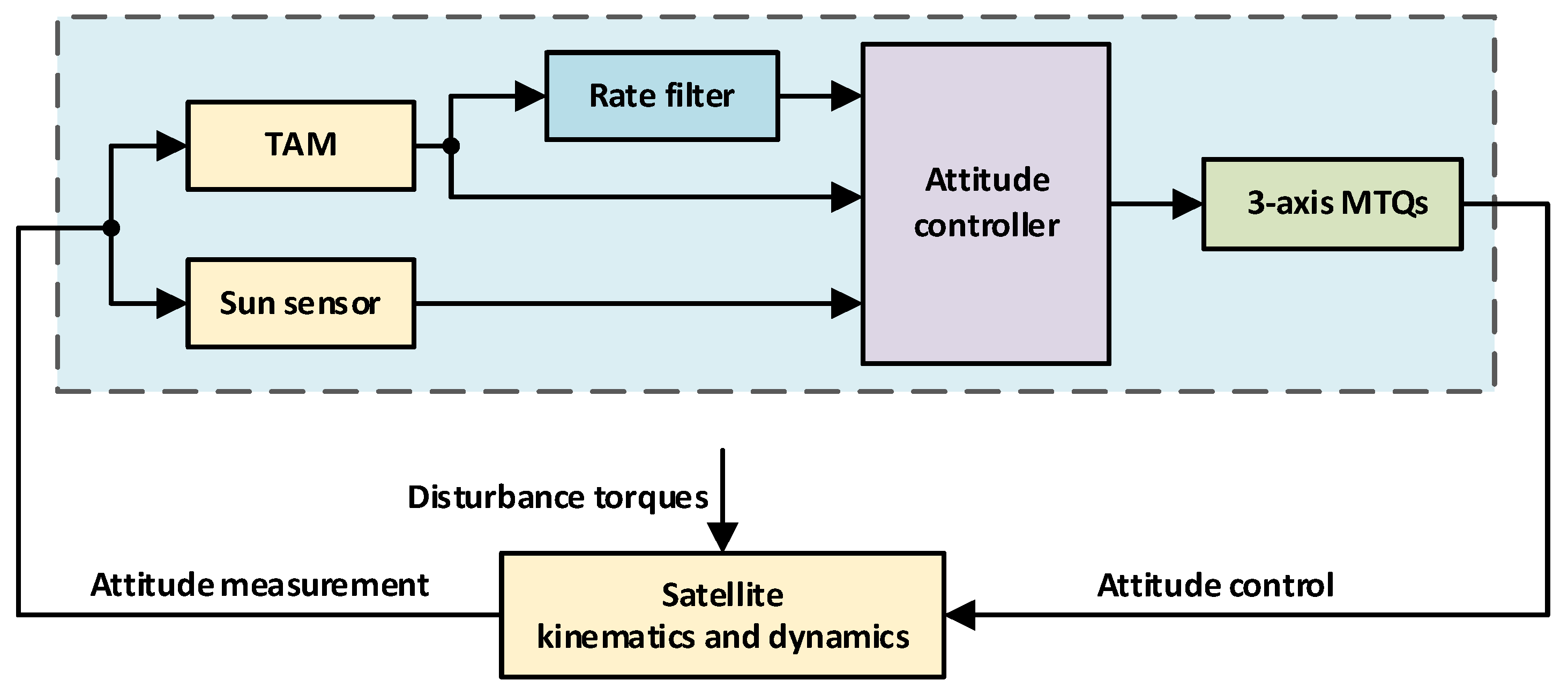
2.1. System Overview
2.2. Kinematics and Dynamics Models
2.3. Control Objective
3. Control Algorithm Design
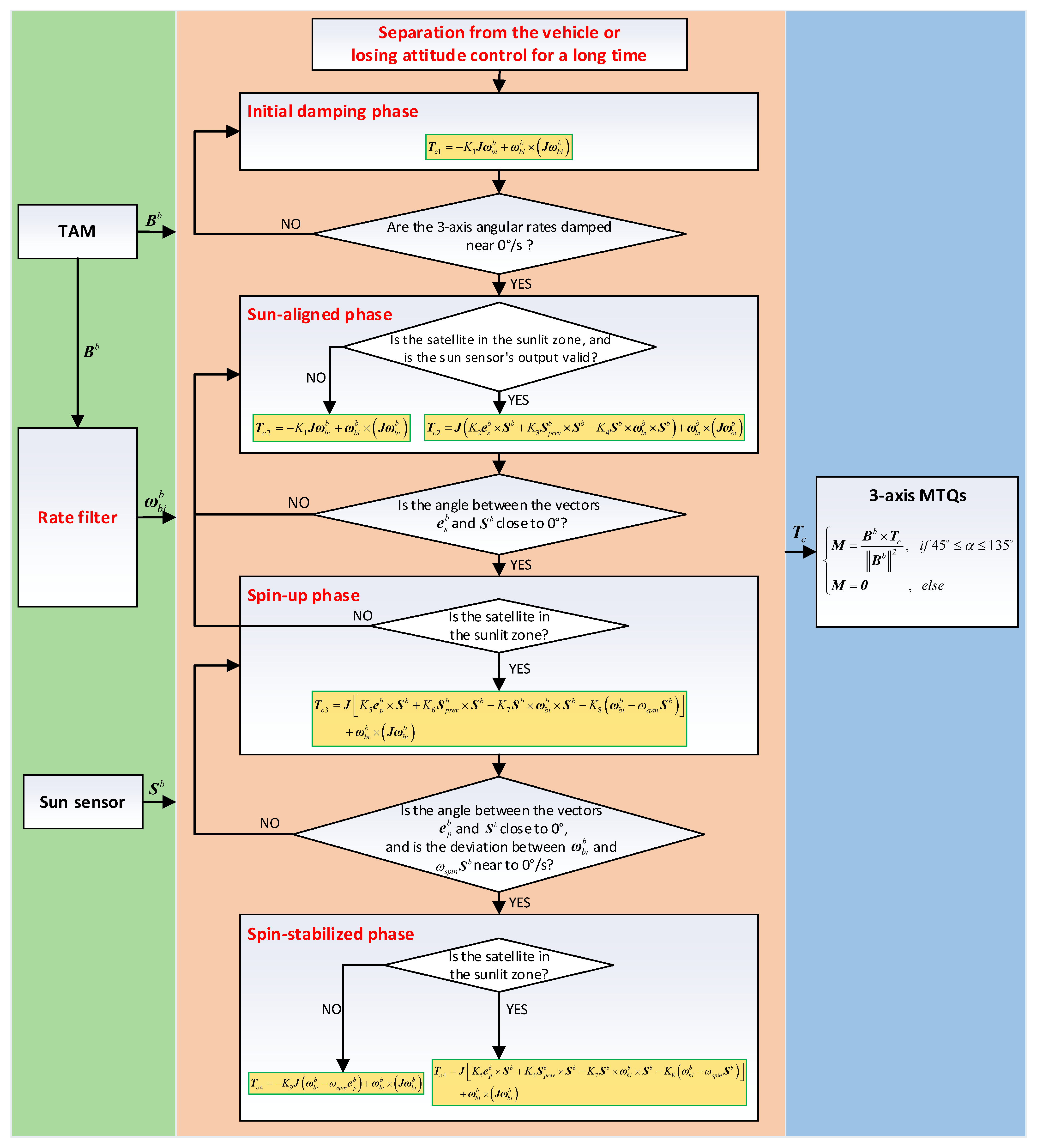
3.1. Sun-Oriented Spin-Stabilized Attitude Control
3.2. Rate Filter Design
3.3. Attitude Controller Design
3.3.1. Initial Damping Phase
3.3.2. Sun-Aligned Phase
3.3.3. Spin-Up Phase
3.3.4. Spin-Stabilized Phase
3.4. Control Command Generation
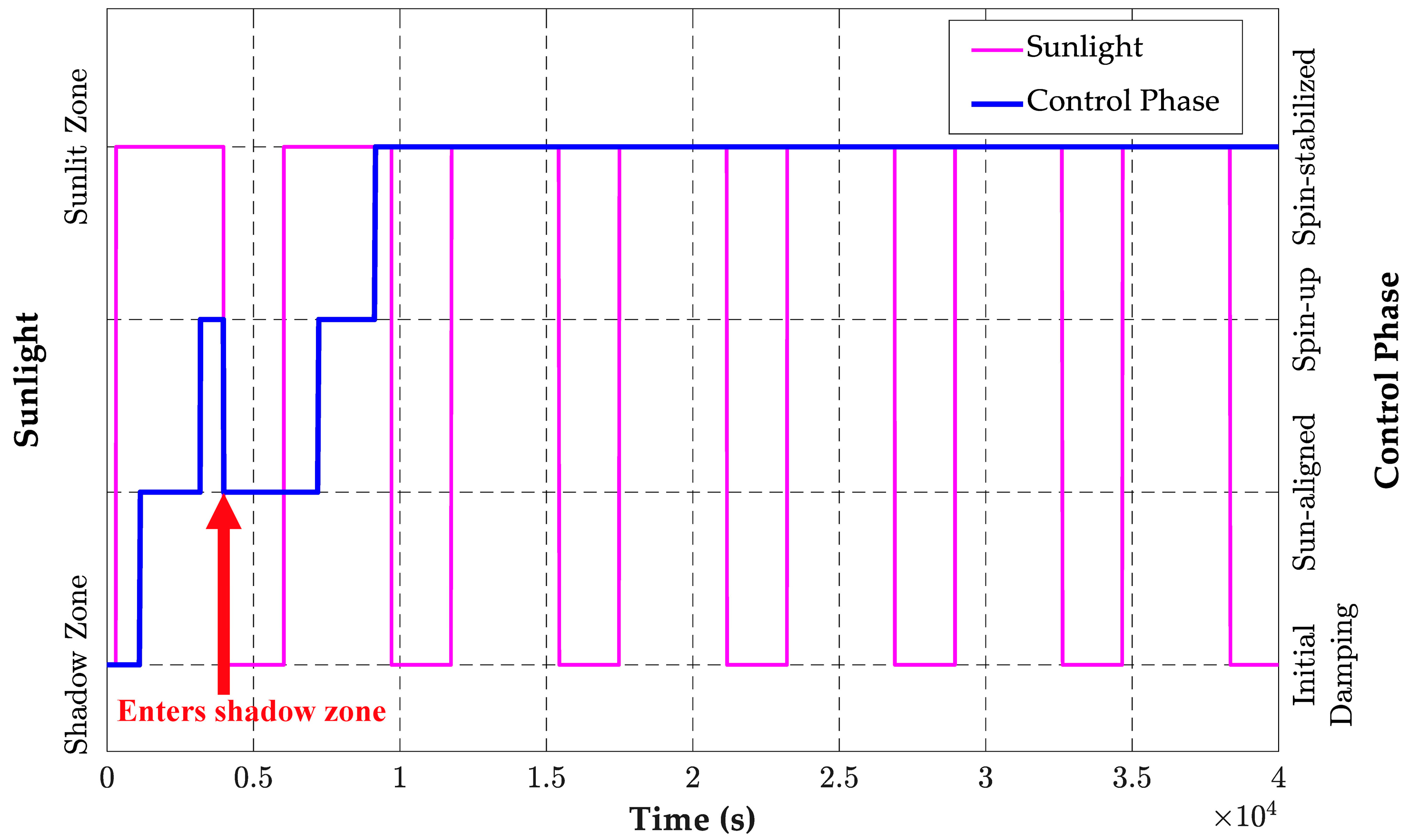
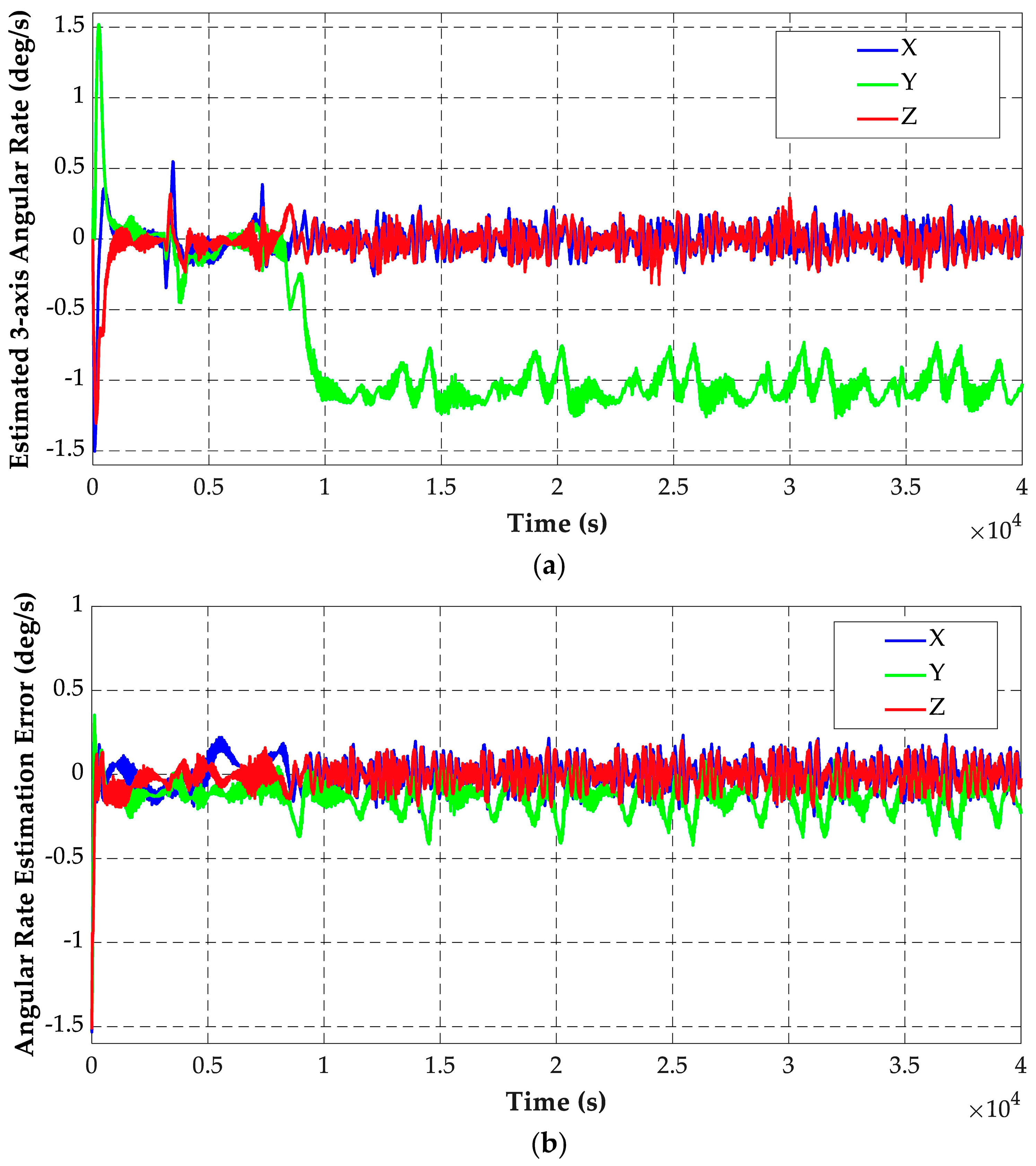
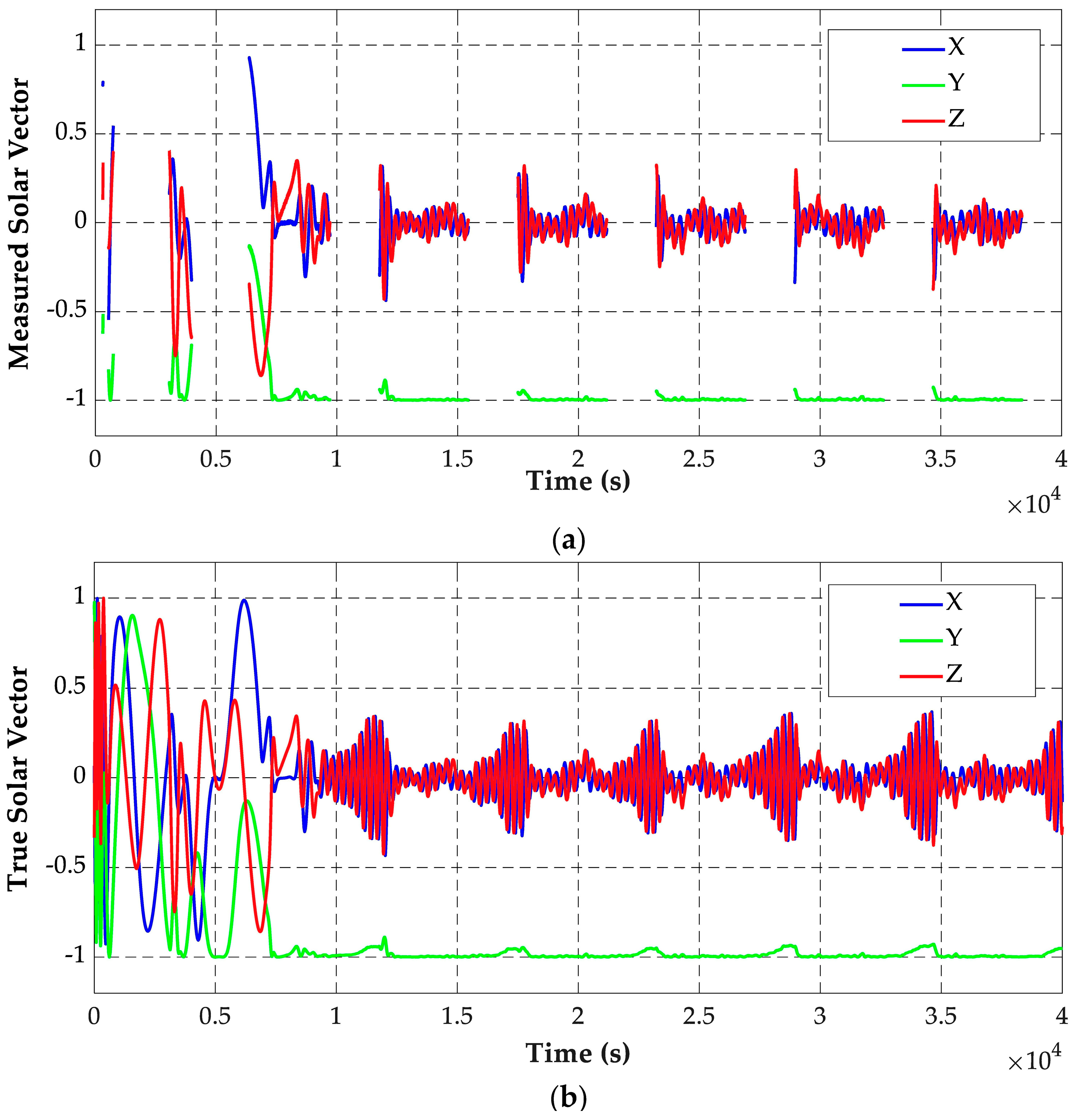
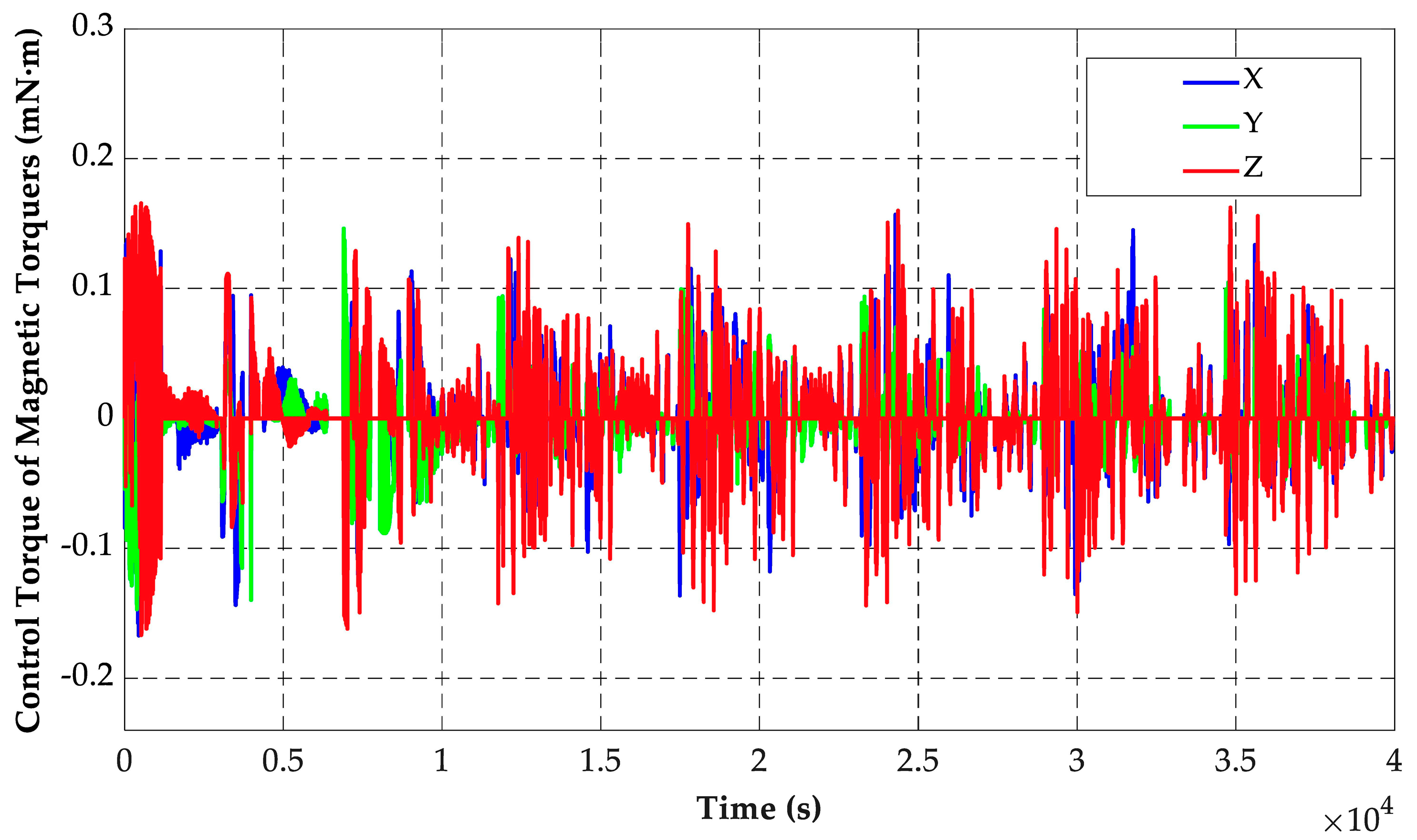
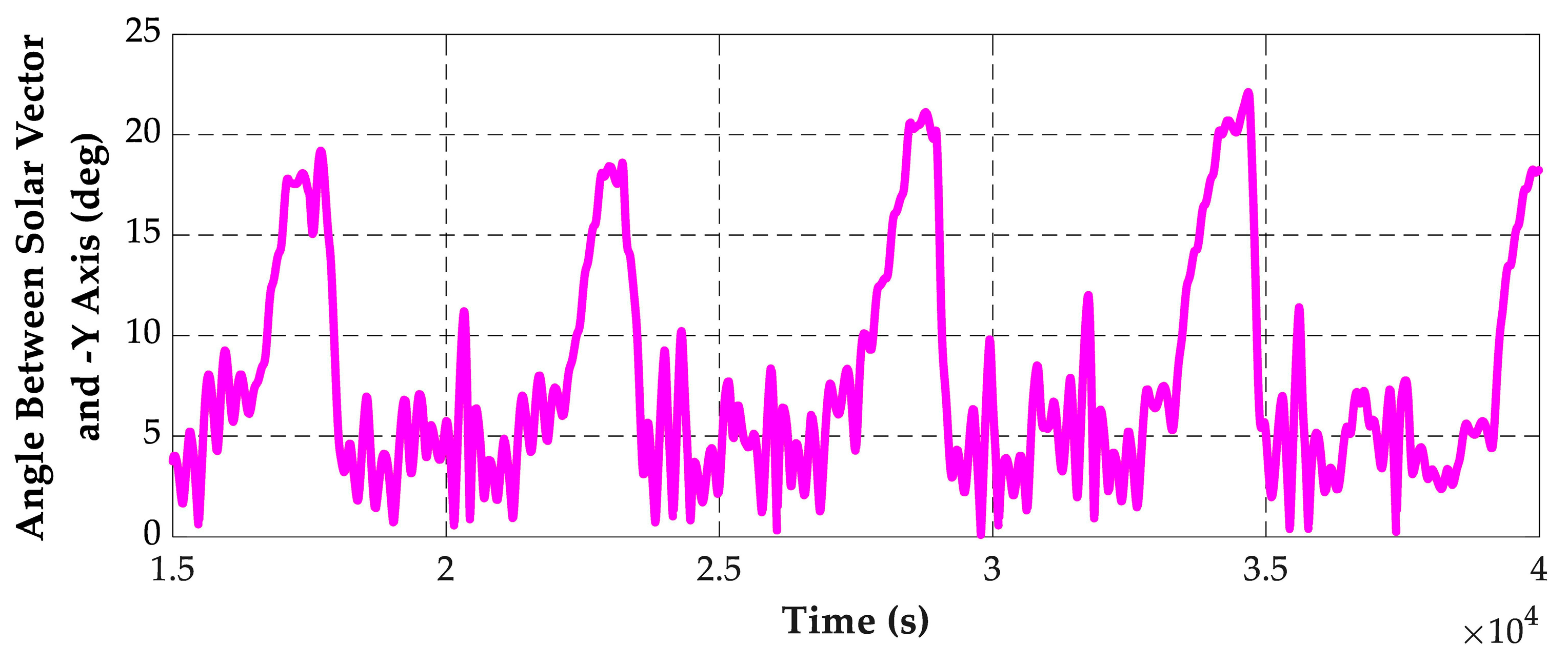
4. Numerical Simulation





5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- World’s Largest Database of Nanosatellites, almost 3500 Nanosats and CubeSats. Available online: https://www.nanosats.eu (accessed on 1 August 2022).
- Li, J.; Wang, Q.; Zhang, S.; Zhao, Z. Analysis on development trends of foreign country’s micro/nano satellites in earth observation. Spacecr. Eng. 2020, 29, 126–132. [Google Scholar]
- Man, X. Analysis on the development situation of China’s micro/nano satellite industry. Satell. Appl. 2019, 2, 34–38. [Google Scholar]
- Ma, J. A Design of Micro/Nano Satellite Simulator. Master’s Thesis, Jilin University, Jilin, China, 2021. [Google Scholar]
- Nakasuka, S.; Miyata, K.; Tsuruda, Y.; Aoyanagi, Y.; Matsumoto, T. Discussions on Attitude Determination and Control System for Micro/Nano/Pico-Satellites Considering Survivability Based on Hodoyoshi-3 and 4 Experiences. Acta Astronaut. 2018, 145, 515–527. [Google Scholar] [CrossRef]
- Feruglio, L.; Corpino, S. Neural Networks to Increase the Autonomy of Interplanetary Nanosatellite Missions. Robot. Auton. Syst. 2017, 93, 52–60. [Google Scholar] [CrossRef]
- Hu, X.; Zhao, Y.; Chen, X.; Lattarulo, V. Conceptual Moon Imaging Micro/Nano-Satellite Design Optimization under Uncertainty. Acta Astronaut. 2018, 148, 22–31. [Google Scholar] [CrossRef]
- Li, Z.; Li, J.; Schmit, T.J.; Wang, P.; Lim, A.; Li, J.; Nagle, F.W.; Bai, W.; Otkin, J.A.; Atlas, R.; et al. The Alternative of CubeSat-Based Advanced Infrared and Microwave Sounders for High Impact Weather Forecasting. Atmos. Ocean. Sci. Lett. 2019, 12, 80–90. [Google Scholar] [CrossRef]
- Bouwmeester, J.; Guo, J. Survey of Worldwide Pico- and Nanosatellite Missions, Distributions and Subsystem Technology. Acta Astronaut. 2010, 67, 854–862. [Google Scholar] [CrossRef]
- Lu, Z. Status and Trends of the Small Satellite and Micro/nano Satellites. J. Ordnance Equip. Eng. 2018, 39, 1–7. [Google Scholar]
- Shi, R.; Li, X.; Deng, K. Development situation of micro/nano satellite and its application in optical reconnaissance. Aerosp. Electron. Warf. 2016, 32, 8–13. [Google Scholar]
- Nakasuka, S.; Sako, N.; Sahara, H.; Nakamura, Y.; Eishima, T.; Komatsu, M. Evolution from Education to Practical Use in University of Tokyo’s Nano-Satellite Activities. Acta Astronaut. 2010, 66, 1099–1105. [Google Scholar] [CrossRef]
- Yamada, K.; Nagano, H. Development of a Heat Storage Panel for Micro/Nano-Satellites and Demonstration in Orbit. Appl. Therm. Eng. 2015, 91, 894–900. [Google Scholar] [CrossRef]
- Birkhold, E.; Leiss, F.; Stopfkuchen, K. An Active Magnetic Attitude Control System for a Spinning Sun Oriented Satellite. In Proceedings of the 3rd IFAC Symposium on Automatic Control in Space, Friedrichshafen, Germany, 2–6 March 1970. [Google Scholar]
- Falbel, G.; Puig-Suari, J.; Peczalski, A. Sun Oriented and Powered, 3 Axis and Spin Stabilized CubeSats. In Proceedings of the Aerospace Conference, Big Sky, MT, USA, 9–16 March 2002. [Google Scholar]
- Luo, J. Study on Attitude Control of Solar Sail Spacecraft. Master’s Thesis, Harbin Institute of Technology, Harbin, China, 2007. [Google Scholar]
- Ousaloo, H.S.; Badpa, A. Magnetic Attitude Control System for Spin Stabilized Satellite. In Proceedings of the 20th Iranian Conference on Electrical Engineering (ICEE 2012), Tehran, Iran, 15–17 May 2012. [Google Scholar]
- Nakanishi, H.; Takagi, R.; Oda, M. Dynamics Analysis of Weathercock like Passive Sun-Oriented Control Using Solar Pressure. Trans. JPN. Soc. Aeronaut. Space Sci. Aerosp. Technol. JPN. 2019, 17, 483–490. [Google Scholar] [CrossRef]
- Xia, X.; Guo, C.; Chen, H.; Xu, W.; Zhang, K.; Zhou, S. A Spinning Sun Oriented Method Based on Pure Magnetic Control. China Patent 109649693, 21 January 2019. [Google Scholar]
- Xia, X.; Zhang, K.; Guo, C.; Chen, H.; Zhou, S.; Xu, W. An Improved Spinning Sun Oriented Method Based on Pure Magnetic Control Using Geomagnetic Field Measurement Data. China Patent 109677638, 30 January 2019. [Google Scholar]
- Liu, S.; Guo, C.; Gao, H.; Wang, J. A Kind of Attitude Control Method of the Satellite on the Morning–Dusk Sun Synchronization Orbit for Sun Acquisition. Aerosp. Control. 2020, 38, 14–18. [Google Scholar]
- Zanardi, M.C.; Celestino, C.C.; Borderes Motta, G.; França, E.M.; Garcia, R.V. Analysis of Analytical Attitude Propagators for Spin-Stabilized Satellites. Comput. Appl. Math. 2018, 37, 96–109. [Google Scholar] [CrossRef]
- Mikhail, Y.O. Interplanetary Small-Satellite Missions: Ballistic Problems and Their Solutions. Gyroscopy Navig. 2021, 12, 281–293. [Google Scholar]
- Stefano, C. Design of fuel-saving lunar captures using finite thrust and gravity-braking. Acta Astronaut. 2021, 181, 190–200. [Google Scholar]
- Natasha, B.; Andrew, D.C.; Kathleen, C.H.; David, C.F. Trajectory design for a cislunar CubeSat leveraging dynamical systems techniques: The Lunar Ice Cube mission. Acta Astronaut. 2018, 144, 283–296. [Google Scholar]
- Chris, P.C.; Olivier, B.A.H.; Jim, H. Advanced Microsatellite Mission deep space applications and constraints. Acta Astronaut. 2006, 59, 817–822. [Google Scholar]
- Zhang, R. Satellite Orbit Attitude Dynamics and Control, 1st ed.; Beihang University Press: Beijing, China, 1998; pp. 150–176. [Google Scholar]
- Tortora, P.; Oshman, Y.; Santoni, F. Spacecraft Angular Rate Estimation from Magnetometer Data Only Using an Analytic Predictor. J. Guid. Control. Dyn. 2004, 27, 365–373. [Google Scholar] [CrossRef]
- Shi, S.; Yuan, B.; Zhao, K.; You, Z.; Zhang, G. Fault-Tolerant Attitude Determination and Control System Design of Nanosatellite 2. J. Aerosp. Eng. 2018, 31, 04018087. [Google Scholar] [CrossRef]
- Fu, M.; Deng, Z.; Yan, L. Kalman Filter Theory and Its Application in Navigation System, 2nd ed.; Science Press: Beijing, China, 2010; pp. 160–170. [Google Scholar]
- Titterton, D.H.; Weston, J.L. Strapdown Inertial Navigation Technology, 2nd ed.; Institution of Electrical Engineers: London, UK, 2004; pp. 17–58. [Google Scholar]
- Liu, S.; Zhang, R.; Xie, X.; Zuo, L. A new controlling method for velocity damping and sun acquisition of satellite with only sun vector. Autom. Panor. 2011, S2, 118–121. [Google Scholar]
- Khalil, H.K. Nonlinear Systems, 3rd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2001; pp. 111–181. [Google Scholar]
- Alken, P.; Thébault, E.; Beggan, C.D.; Amit, H.; Aubert, J.; Baerenzung, J.; Bondar, T.N.; Brown, W.J.; Califf, S.; Chambodut, A.; et al. International Geomagnetic Reference Field: The thirteenth generation. Earth Planets Space 2021, 73, 1–25. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Site | Parameter | Value |
|---|---|---|
| Orbit parameters | Type of orbit | Sun-synchronous orbit |
| Altitude | 545 km | |
| Local time of the descending node | 10:30 | |
| Eccentricity | 0 | |
| On-board orbit propagation model | SGP4 | |
| Satellite parameters | Inertia moment | [1.37 1.69 2.05] kg·m2 |
| Distance between pressure center and centroid | 0.034 m | |
| Remanence | 0.02 A·m2 | |
| Surface reflection coefficient | 0.600 | |
| Solar panel installation direction | [0 −1 0] | |
| Attitude sensors | 3-axis magnetometer: Constant offset Random noise (3σ) | 0.1 uT 0.4 uT |
| Sun sensor: Optical axis direction Field of view Accuracy | [0.3536 −0.8660 −0.3536] 90° × 110° 0.2° | |
| Attitude actuators | Maximum magnetic torque of 3-axis magnetic torquers | [2.52 3.21 2.52] A·m2 |
| Environmental torques | Gravity gradient torque | 1.81 × 10−6 N·m |
| Aerodynamic torque | 4.92 × 10−7 N·m | |
| Solar radiation torque | 1.58 × 10−7 N·m | |
| Geomagnetic torque | 7.89 × 10−7 N·m | |
| Geomagnetic field model | Accuracy | 8-order IGRF [34] |
| Orbit injection parameters | Separation angular rate | [−1.5 −1.5 −1.5]°/s |
| Inertial attitude | [160 20 60]° |
| Control Coefficient | Value |
|---|---|
| K1, K9 | 0.01 |
| K2, K5 | 0.0005 |
| K3, K6 | 0.001 |
| K4, K7 | 0.02 |
| K8 | 0.006 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yuan, B.; Yang, D.; Meng, Z. Research on Sun-Oriented Spin-Stabilized Attitude Control of Micro/Nano Satellite Using Only Magnetic Control. Electronics 2023, 12, 362. https://doi.org/10.3390/electronics12020362
Yuan B, Yang D, Meng Z. Research on Sun-Oriented Spin-Stabilized Attitude Control of Micro/Nano Satellite Using Only Magnetic Control. Electronics. 2023; 12(2):362. https://doi.org/10.3390/electronics12020362
Chicago/Turabian StyleYuan, Binwen, Deng Yang, and Ziyang Meng. 2023. "Research on Sun-Oriented Spin-Stabilized Attitude Control of Micro/Nano Satellite Using Only Magnetic Control" Electronics 12, no. 2: 362. https://doi.org/10.3390/electronics12020362