Figure 1.
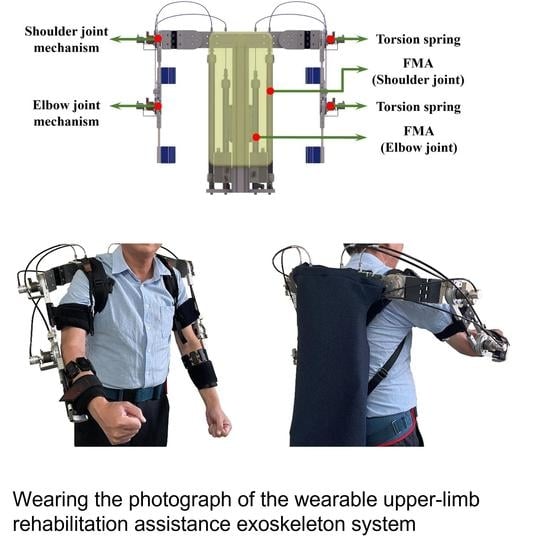
Computer-aided mechanical design of a wearable upper-limb rehabilitation assistance exoskeleton system (WURAES).
Figure 1.
Computer-aided mechanical design of a wearable upper-limb rehabilitation assistance exoskeleton system (WURAES).
Figure 2.
Photograph of the designed WURAES.
Figure 2.
Photograph of the designed WURAES.
Figure 3.
Joint structure diagram of the torsion spring module.
Figure 3.
Joint structure diagram of the torsion spring module.
Figure 4.
Layout and item specifications of the designed unilateral WURAES.
Figure 4.
Layout and item specifications of the designed unilateral WURAES.
Figure 5.
Coordinate system diagram of the designed WURAES.
Figure 5.
Coordinate system diagram of the designed WURAES.
Figure 6.
The verification process of forward and inverse kinematics.
Figure 6.
The verification process of forward and inverse kinematics.
Figure 7.
Results of kinematic validation.
Figure 7.
Results of kinematic validation.
Figure 8.
Unilateral arm of the designed WURAES.
Figure 8.
Unilateral arm of the designed WURAES.
Figure 9.
Dynamic model of the shoulder joint of the designed WURAES.
Figure 9.
Dynamic model of the shoulder joint of the designed WURAES.
Figure 10.
Dynamic model of the elbow joint of the designed WURAES.
Figure 10.
Dynamic model of the elbow joint of the designed WURAES.
Figure 11.
Principle of the proposed proxy-based output feedback sliding mode control (POFSC) for the shoulder and elbow joints.
Figure 11.
Principle of the proposed proxy-based output feedback sliding mode control (POFSC) for the shoulder and elbow joints.
Figure 12.
A control block diagram of the proposed POFSC.
Figure 12.
A control block diagram of the proposed POFSC.
Figure 13.
Results of fifth-order path-tracking positioning for shoulder joint flexion angles of 30° and 45°. (a) System response, (b) tracking error, and (c) control voltage.
Figure 13.
Results of fifth-order path-tracking positioning for shoulder joint flexion angles of 30° and 45°. (a) System response, (b) tracking error, and (c) control voltage.
Figure 14.
Results of fifth-order path-tracking for elbow joint flexion angles of 60° and 75°. (a) System response, (b) tracking error, and (c) control voltage.
Figure 14.
Results of fifth-order path-tracking for elbow joint flexion angles of 60° and 75°. (a) System response, (b) tracking error, and (c) control voltage.
Figure 15.
Comparison of fifth-order path-tracking between the POFSC and PID for the shoulder joint flexion angle of 30°. (a) System response, (b) tracking error, and (c) control voltage.
Figure 15.
Comparison of fifth-order path-tracking between the POFSC and PID for the shoulder joint flexion angle of 30°. (a) System response, (b) tracking error, and (c) control voltage.
Figure 16.
Comparison of fifth-order path-tracking between the POFSC and PID for the shoulder joint flexion angle of 45°. (a) System response, (b) tracking error, and (c) control voltage.
Figure 16.
Comparison of fifth-order path-tracking between the POFSC and PID for the shoulder joint flexion angle of 45°. (a) System response, (b) tracking error, and (c) control voltage.
Figure 17.
Comparison of fifth-order path-tracking between the POFSC and PID for the elbow joint flexion angle of 60°. (a) System response, (b) tracking error, and (c) control voltage.
Figure 17.
Comparison of fifth-order path-tracking between the POFSC and PID for the elbow joint flexion angle of 60°. (a) System response, (b) tracking error, and (c) control voltage.
Figure 18.
Comparison of fifth-order path-tracking between the POFSC and PID for the elbow joint flexion angle of 75°. (a) System response, (b) tracking error, and (c) control voltage.
Figure 18.
Comparison of fifth-order path-tracking between the POFSC and PID for the elbow joint flexion angle of 75°. (a) System response, (b) tracking error, and (c) control voltage.
Figure 19.
Safety test and comparison of the POFSC and PID in the shoulder joint of WURAES. (a) System response, (b) tracking error, and (c) control voltage.
Figure 19.
Safety test and comparison of the POFSC and PID in the shoulder joint of WURAES. (a) System response, (b) tracking error, and (c) control voltage.
Figure 20.
Basic gesture settings for general users.
Figure 20.
Basic gesture settings for general users.
Figure 21.
Gesture settings for the target angle, which was selected in accordance with the user’s needs.
Figure 21.
Gesture settings for the target angle, which was selected in accordance with the user’s needs.
Figure 22.
Gesture 1 (fist) maintained for 10 s. The EMG signal and RMS graph of the eight sensors in the sEMG bracelet.
Figure 22.
Gesture 1 (fist) maintained for 10 s. The EMG signal and RMS graph of the eight sensors in the sEMG bracelet.
Figure 23.
Gesture 2 (spread) maintained for 10 s. The EMG signal and RMS graph of the eight sensors in the sEMG bracelet.
Figure 23.
Gesture 2 (spread) maintained for 10 s. The EMG signal and RMS graph of the eight sensors in the sEMG bracelet.
Figure 24.
Gesture 3 (wave-in) maintained for 10 s. The EMG signal and RMS graph of the eight sensors in the sEMG bracelet.
Figure 24.
Gesture 3 (wave-in) maintained for 10 s. The EMG signal and RMS graph of the eight sensors in the sEMG bracelet.
Figure 25.
Gesture 4 (wave-out) maintained for 10 s. The EMG signal and RMS graph of the eight sensors in the sEMG bracelet.
Figure 25.
Gesture 4 (wave-out) maintained for 10 s. The EMG signal and RMS graph of the eight sensors in the sEMG bracelet.
Figure 26.
Gesture 5 (double-tap) performed six double taps in 10 s. The EMG signal and RMS graph of the eight sensors in the sEMG bracelet.
Figure 26.
Gesture 5 (double-tap) performed six double taps in 10 s. The EMG signal and RMS graph of the eight sensors in the sEMG bracelet.
Figure 27.
sEMG bracelet worn on the forearm to detect motion intention.
Figure 27.
sEMG bracelet worn on the forearm to detect motion intention.
Figure 28.
Basic action experiment for elbow lifting.
Figure 28.
Basic action experiment for elbow lifting.
Figure 29.
Basic action experiment for shoulder lifting.
Figure 29.
Basic action experiment for shoulder lifting.
Figure 30.
Basic action experiment for shoulder dropping.
Figure 30.
Basic action experiment for shoulder dropping.
Figure 31.
Basic action experiment for elbow dropping.
Figure 31.
Basic action experiment for elbow dropping.
Figure 32.
Desired action experiment with a shoulder flexion angle of 45° and an elbow flexion angle of 60°.
Figure 32.
Desired action experiment with a shoulder flexion angle of 45° and an elbow flexion angle of 60°.
Figure 33.
Desired action experiment with a shoulder flexion angle of 25° and an elbow flexion angle of 80°.
Figure 33.
Desired action experiment with a shoulder flexion angle of 25° and an elbow flexion angle of 80°.
Figure 34.
Desired action experiment with a shoulder flexion angle of 5° and an elbow flexion angle of 5°.
Figure 34.
Desired action experiment with a shoulder flexion angle of 5° and an elbow flexion angle of 5°.
Table 1.
Denavit–Hartenberg coordinate parameters of the designed WURAES.
Table 1.
Denavit–Hartenberg coordinate parameters of the designed WURAES.
| | | | |
|---|
| 1 | | 0 | | 0 |
| 2 | 0 | | | 0 |
| 3 | | 0 | 0 | -90 |
| 4 | | | | 90 |
| 5 | | 0 | | 0 |
| 6 | 0 | 0 | | 0 |
Table 2.
Parameters used in the system model.
Table 2.
Parameters used in the system model.
| Parameter |
|---|
| Contraction force of the fluidic muscle actuator (FMA) |
| Initial pressure |
| Pressure change |
| Adjustment factor obtained after comparing the actual braided fiber length with the ideal fiber length (the smaller the fiber braiding angle or the more turns the fiber wraps around the rubber tube, the closer the parameter is to 1) |
| Volume ratio of the actual cylinder to an ideal cylinder (when the FMA is inflated, if the diameter of the middle part is closer to the diameter at the end, the parameter value is closer to 1, which indicates that the effect of end restriction is weaker) |
| PMA length shrinkage rate |
| Initial diameter of the FMA |
| Initial fiber weaving angle |
| Actual fiber weaving angle |
| Number of turns of the fiber winding |
| Elastic force generated by the rubber cylinder being stretched |
| Elastic force of the rubber cylinder due to its enlarged longitudinal circumference |
| Sum of the static friction between the braided fibers inside the FMA and between the rubber tube and the braided fiber layer (the static friction is affected by many factors and cannot be determined through calculations) |
| Elastic modulus of the rubber material |
| Wall thickness of the rubber tube |
| Diameter of the rubber tube after inflation and loading |
| Initial diameter of the rubber tube |
| Length of the actual FMA |
| Minimum unloaded length of the FMA after inflation |
Table 3.
Parameters of the proposed POFSC in fifth-order path-tracking positioning control for the shoulder joint.
Table 3.
Parameters of the proposed POFSC in fifth-order path-tracking positioning control for the shoulder joint.
| POFSC |
| | | | | | | |
| 5 | 40 | 80 | 1600 | 270 | 0.45 | 12 | 5000 | 1000 |
Table 4.
Error in path-tracking positioning control for the shoulder joint.
Table 4.
Error in path-tracking positioning control for the shoulder joint.
| Position (°) | Maximum Absolute Error (°) | Root-Mean-Square Deviation (°) |
|---|
| 30° | 0.93 | 0.30 |
| 45° | 1.28 | 0.41 |
Table 5.
Parameters of the proposed POFSC in fifth-order path-tracking positioning control for the elbow joint.
Table 5.
Parameters of the proposed POFSC in fifth-order path-tracking positioning control for the elbow joint.
| POFSC |
| | | | | | | |
| 5 | 42.5 | 85 | 2400 | 900 | 1.05 | 12 | 5000 | 1000 |
Table 6.
Error in path-tracking control for the elbow joint.
Table 6.
Error in path-tracking control for the elbow joint.
| Position (°) | Maximum Absolute Error (°) | Root-Mean-Square Deviation (°) |
|---|
| 60° | 1.34 | 0.52 |
| 75° | 0.89 | 0.44 |
Table 7.
The controller parameters of the PID experiment.
Table 7.
The controller parameters of the PID experiment.
| PID |
|---|
| | |
| 0.03 | 0.5 | 0.005 |
Table 8.
Error comparison using the POFSC and PID for the shoulder joint (30°).
Table 8.
Error comparison using the POFSC and PID for the shoulder joint (30°).
| Control Method | Maximum Absolute Error (°) | Root-Mean-Square Deviation (°) |
|---|
| POFSC | 0.94 | 0.30 |
| PID | 2.53 | 0.67 |
Table 9.
Error comparison using the POFSC and PID for the shoulder joint (45°).
Table 9.
Error comparison using the POFSC and PID for the shoulder joint (45°).
| Control Method | Maximum Absolute Error (°) | Root-Mean-Square Deviation (°) |
|---|
| POFSC | 1.29 | 0.41 |
| PID | 5.22 | 1.84 |
Table 10.
Error comparison using the POFSC and PID for the elbow joint (60°).
Table 10.
Error comparison using the POFSC and PID for the elbow joint (60°).
| Control Method | Maximum Absolute Error (°) | Root-Mean-Square Deviation (°) |
|---|
| POFSC | 1.35 | 0.52 |
| PID | 3.42 | 1.49 |
Table 11.
Error comparison using the POFSC and PID for the elbow joint (75°).
Table 11.
Error comparison using the POFSC and PID for the elbow joint (75°).
| Control Method | Maximum Absolute Error (°) | Root-Mean-Square Deviation (°) |
|---|
| POFSC | 0.88 | 0.44 |
| PID | 4.23 | 1.92 |






































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}