
Finite-Time Neural Network Fault-Tolerant Control for Robotic Manipulators under Multiple Constraints

Abstract
:1. Introduction
- Compared to the results in [1,10,31,33,36], this study considered actuators with multiple constraints. The hyperbolic tangent function and asymmetric dead-zone function were introduced to describe the input characteristics of the system. The entire design process was based on the backstepping scheme in which the DSC and Nussbaum functions are utilized to optimize the design process.
- Based on [11], a finite-time filter was applied to optimize the design process and achieve fast convergence of the system error.
2. Problem Formulation
3. Control Design
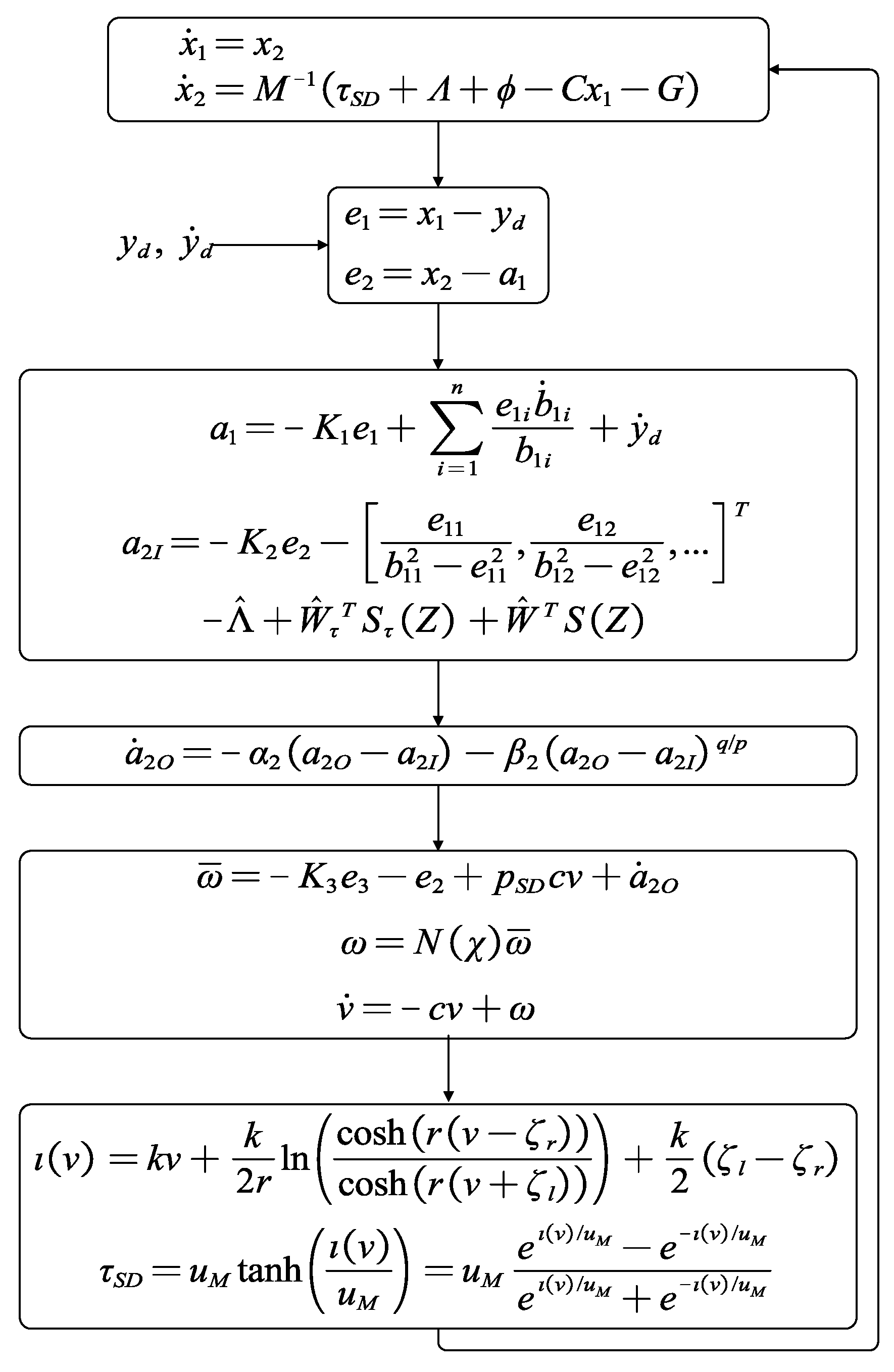
Adaptive Neural Dynamic Surface Controller Design
4. Simulations
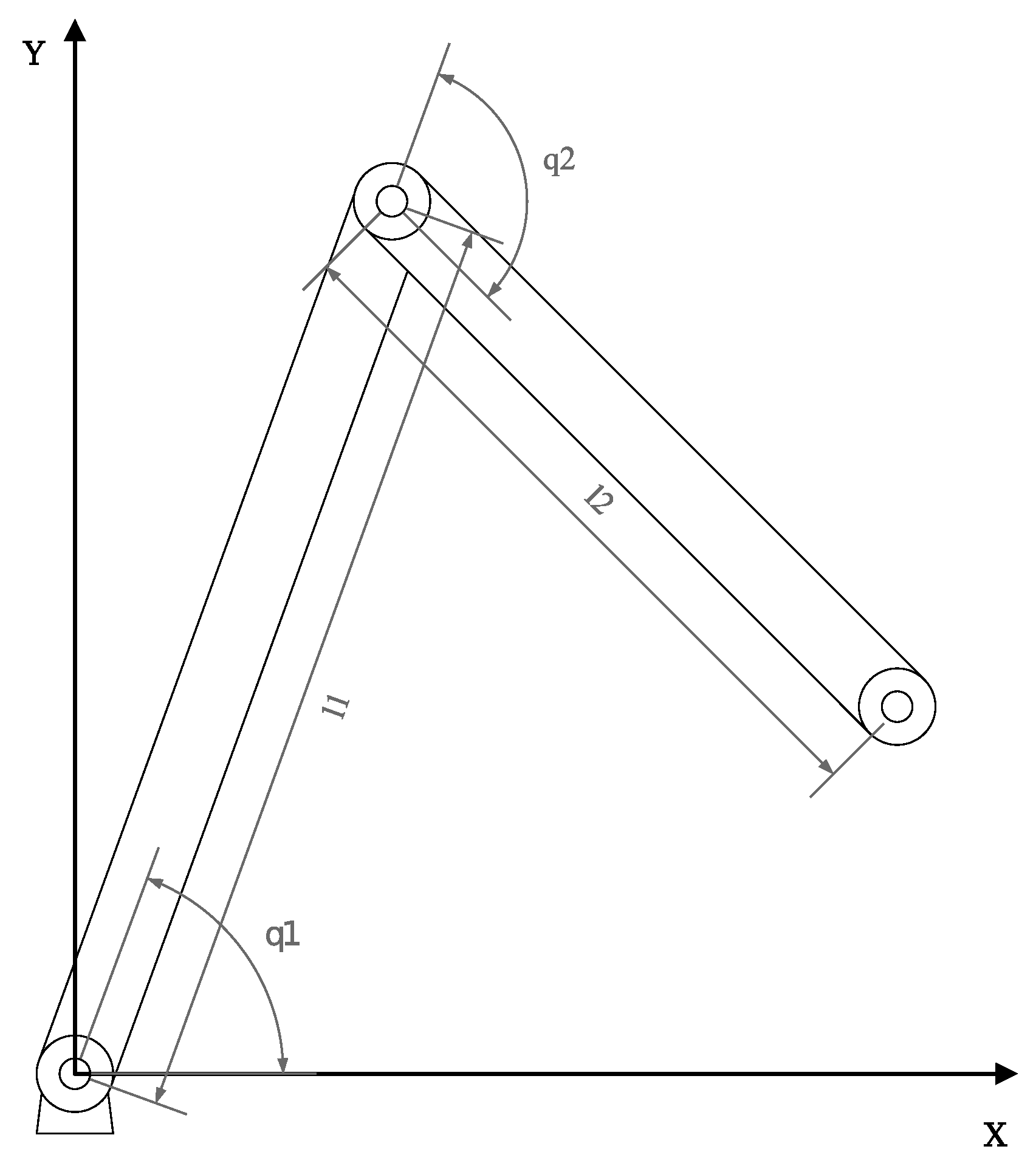
4.1. Robotic System Establishment
4.2. Model-Based Control
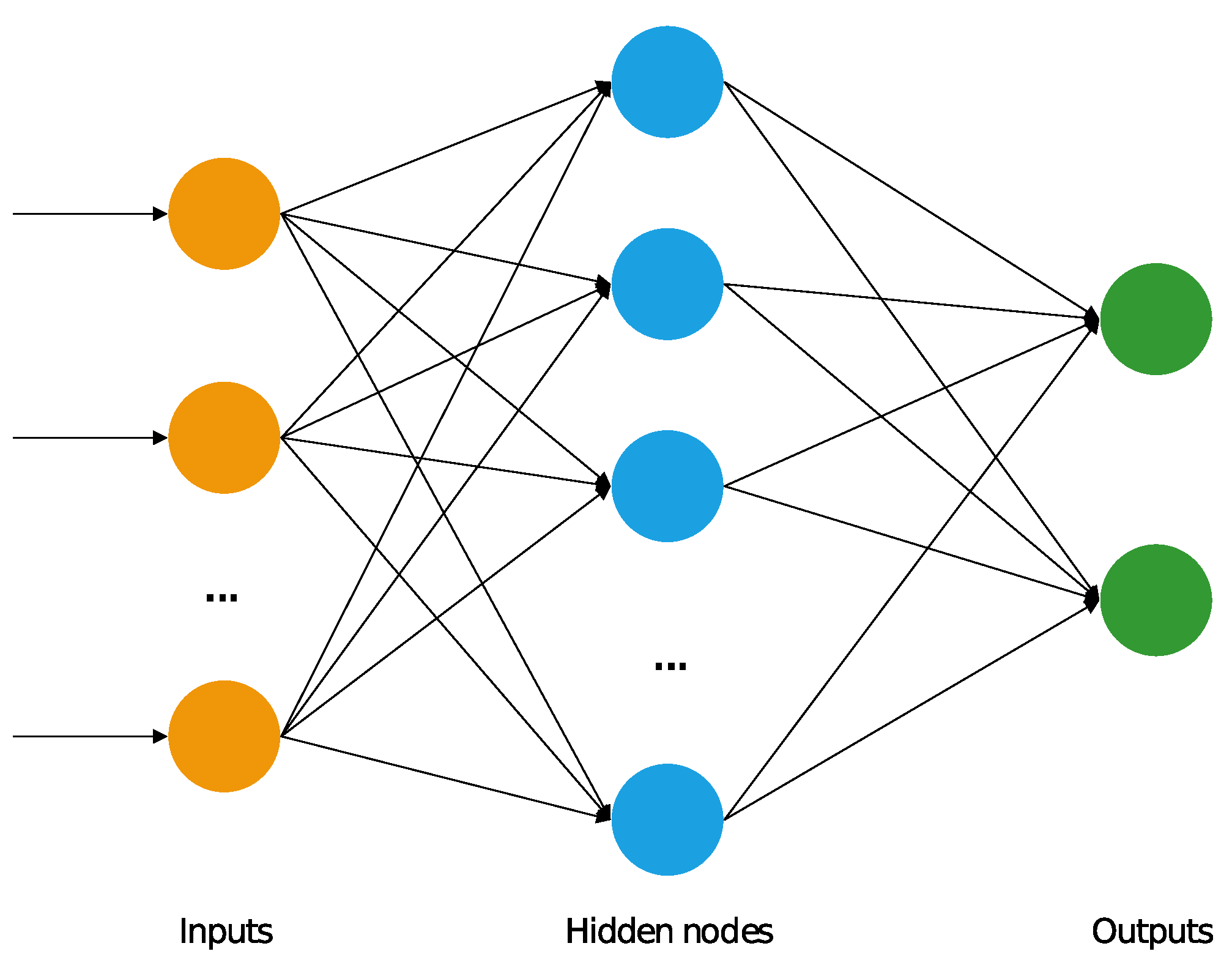
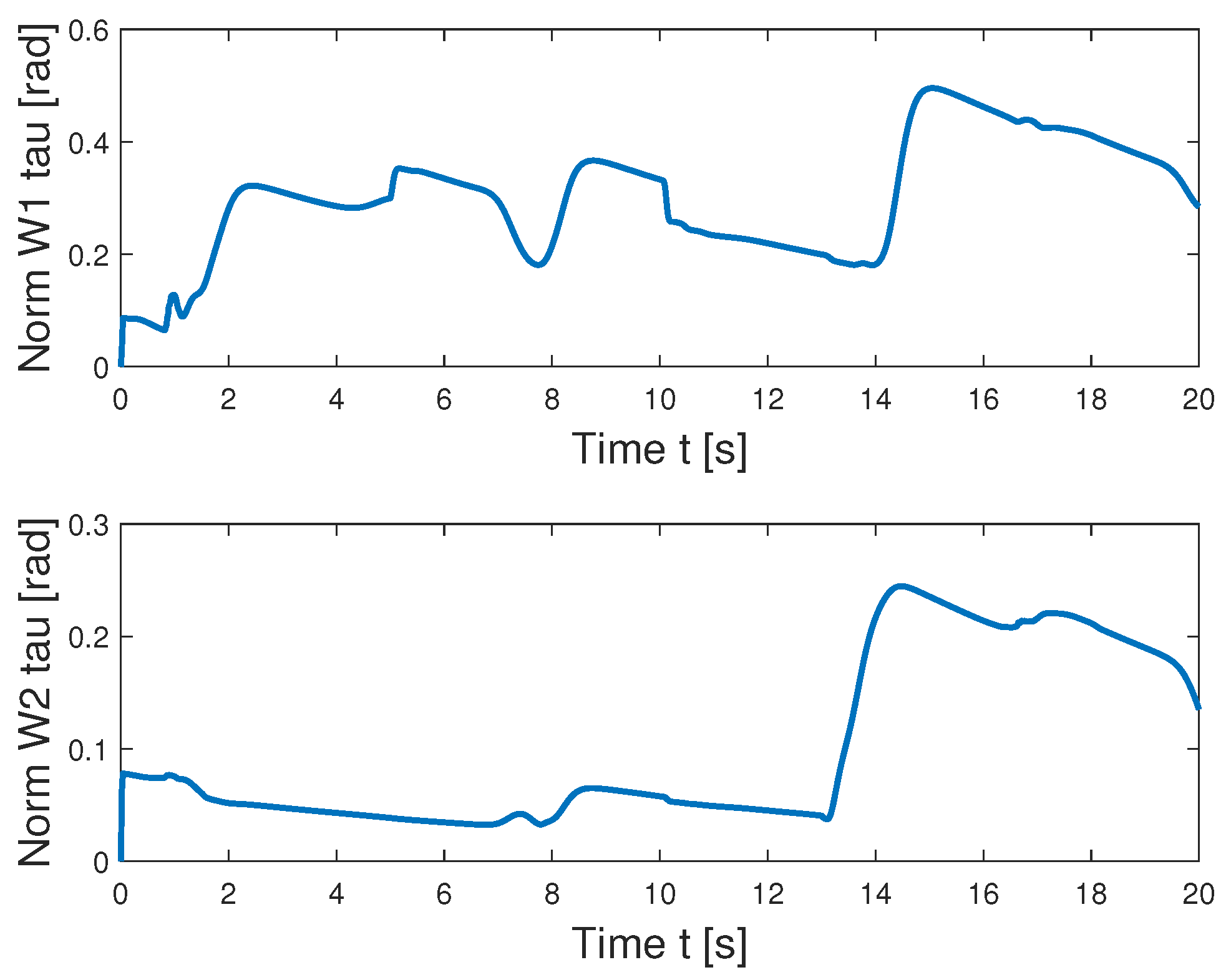
4.3. Adaptive Neural Network Control
4.4. PD Control
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, T.; Ge, S. Adaptive dynamic surface control of nonlinear systems with unknown dead zone in pure feedback form. Automatica 2008, 44, 1895–1903. [Google Scholar] [CrossRef]
- Wang, L.; Shi, Q.; Liu, J.; Zhang, D. Backstepping control of flexible joint manipulator based on hyperbolic tangent function with control input and rate constraints. Asian J. Control 2020, 22, 1268–1279. [Google Scholar] [CrossRef]
- Wei, H.; Amoateng, D.O.; Yang, C.; Gong, D. Adaptive neural network control of a robotic manipulator with unknown backlash-like hysteresis. IET Control Theory Appl. 2017, 11, 567–575. [Google Scholar]
- Yang, C.; Huang, D.; He, W.; Cheng, L. Neural Control of Robot Manipulators with Trajectory Tracking Constraints and Input Saturation. IEEE Trans. Neural Netw. Learn. Syst. 2021, 32, 4231–4242. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Z.; He, X.; Ren, Z.; Wen, G. Boundary Adaptive Robust Control of a Flexible Riser System with Input Nonlinearities. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 1971–1980. [Google Scholar] [CrossRef]
- Zhao, Z.; Zhang, J.; Liu, Z.; Mu, C.; Hong, K.-S. Adaptive Neural Network Control of an Uncertain 2-DOF Helicopter with Unknown Backlash-like Hysteresis and Output Constraints. IEEE Trans. Neural Netw. Learn. Syst. 2022. [Google Scholar] [CrossRef] [PubMed]
- Tao, G.; Kokotovic, P. Adaptive control of plants with unknown dead-zones. IEEE Trans. Autom. Control 1994, 39, 59–68. [Google Scholar]
- Zhou, J.; Wen, C.; Zhang, Y. Adaptive Output Control of Nonlinear Systems with Uncertain Dead-Zone Nonlinearity. IEEE Trans. Autom. Control 2006, 51, 504–511. [Google Scholar] [CrossRef]
- Shi, Z. Global Asymptotic Tracking for Gear Transmission Servo Systems with Differentiable Backlash Nonlinearity. In Proceedings of the 2014 Seventh International Symposium on Computational Intelligence and Design, Hangzhou, China, 13–14 December 2014; Volume 2, pp. 253–257. [Google Scholar] [CrossRef]
- Jin, C.; Cai, M.; Xu, Z. Dual-Motor Synchronization Control Design Based on Adaptive Neural Networks Considering Full-State Constraints and Partial Asymmetric Dead-Zone. Sensors 2021, 21, 4261. [Google Scholar] [CrossRef]
- Shi, X.; Lim, C.C.; Shi, P.; Xu, S. Adaptive Neural Dynamic Surface Control for Nonstrict-Feedback Systems with Output Dead Zone. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 5200–5213. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lu, K.; Liu, Z.; Lai, G.; Zhang, Y.; Chen, C.L.P. Adaptive Fuzzy Tracking Control of Uncertain Nonlinear Systems Subject to Actuator Dead Zone with Piecewise Time-Varying Parameters. IEEE Trans. Fuzzy Syst. 2019, 27, 1493–1505. [Google Scholar] [CrossRef]
- Liu, Z.; Wang, F.; Zhang, Y.; Chen, X.; Chen, C.L.P. Adaptive Tracking Control for A Class of Nonlinear Systems with a Fuzzy Dead-Zone Input. IEEE Trans. Fuzzy Syst. 2015, 23, 193–204. [Google Scholar] [CrossRef]
- Hua, C.; Wang, Q.; Guan, X. Adaptive Tracking Controller Design of Nonlinear Systems with Time Delays and Unknown Dead-Zone Input. IEEE Trans. Autom. Control 2008, 53, 1753–1759. [Google Scholar] [CrossRef]
- Yao, D.; Dou, C.; Zhao, N.; Zhang, T. Finite-time consensus control for a class of multi-agent systems with dead-zone input. J. Frankl. Inst. 2021, 358, 3512–3529. [Google Scholar] [CrossRef]
- Zhao, Z.; Ren, Y.; Mu, C.; Zou, T.; Hong, K.S. Adaptive Neural-Network-Based Fault-Tolerant Control for a Flexible String with Composite Disturbance Observer and Input Constraints. IEEE Trans. Cybern. 2021, 1–11. [Google Scholar] [CrossRef]
- Zhao, Z.; Liu, Z.; He, W.; Hong, K.S.; Li, H.X. Boundary adaptive fault-tolerant control for a flexible Timoshenko arm with backlash-like hysteresis. Automatica 2021, 130, 109690. [Google Scholar] [CrossRef]
- Chen, S.; Zhao, Z.; Zhu, D.; Zhang, C.; Li, H.X. Adaptive Robust Control for a Spatial Flexible Timoshenko Manipulator Subject to Input Dead-Zone. IEEE Trans. Syst. Man Cybern. Syst. 2022, 52, 1395–1404. [Google Scholar] [CrossRef]
- Ma, H.J.; Yang, G.H. Adaptive output control of uncertain nonlinear systems with non-symmetric dead-zone input. Automatica 2010, 46, 413–420. [Google Scholar] [CrossRef]
- Chen, Y.; Liu, Z.; Chen, C.; Zhang, Y. Adaptive fuzzy control of switched nonlinear systems with uncertain dead-zone: A mode-dependent fuzzy dead-zone model. Neurocomputing 2021, 432, 133–144. [Google Scholar] [CrossRef]
- He, W.; Ouyang, Y.; Hong, J. Vibration Control of a Flexible Robotic Manipulator in the Presence of Input Deadzone. IEEE Trans. Ind. Inform. 2017, 13, 48–59. [Google Scholar] [CrossRef]
- Yang, C.; Peng, G.; Cheng, L.; Na, J.; Li, Z. Force Sensorless Admittance Control for Teleoperation of Uncertain Robot Manipulator Using Neural Networks. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 3282–3292. [Google Scholar] [CrossRef]
- He, W.; Kong, L.; Dong, Y.; Yu, Y.; Yang, C.; Sun, C. Fuzzy Tracking Control for a Class of Uncertain MIMO Nonlinear Systems with State Constraints. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 543–554. [Google Scholar] [CrossRef]
- Kong, L.; Wei, H.; Yang, C.; Li, G.; Zhang, Z. Adaptive Fuzzy Control for a Marine Vessel with Time-varying Constraints. IET Control Theory Appl. 2018, 12, 1448–1455. [Google Scholar] [CrossRef]
- Yang, C.; Chen, C.; Wang, N.; Ju, Z.; Fu, J.; Wang, M. Biologically Inspired Motion Modeling and Neural Control for Robot Learning From Demonstrations. IEEE Trans. Cogn. Dev. Syst. 2019, 11, 281–291. [Google Scholar] [CrossRef] [Green Version]
- He, W.; Chen, Y.; Yin, Z. Adaptive Neural Network Control of an Uncertain Robot with Full-State Constraints. IEEE Trans. Cybern. 2016, 46, 620–629. [Google Scholar] [CrossRef]
- He, W.; Huang, H.; Ge, S.S. Adaptive Neural Network Control of a Robotic Manipulator with Time-Varying Output Constraints. IEEE Trans. Cybern. 2017, 47, 3136–3147. [Google Scholar] [CrossRef]
- He, W.; Yin, Z.; Sun, C. Adaptive Neural Network Control of a Marine Vessel with Constraints Using the Asymmetric Barrier Lyapunov Function. IEEE Trans. Cybern. 2017, 47, 1641–1651. [Google Scholar] [CrossRef]
- Mao, Z.; Yan, X.G.; Jiang, B.; Chen, M. Adaptive Fault-Tolerant Sliding-Mode Control for High-Speed Trains with Actuator Faults and Uncertainties. IEEE Trans. Intell. Transp. Syst. 2020, 21, 2449–2460. [Google Scholar] [CrossRef] [Green Version]
- Li, L.; Liu, J. Neural-network-based adaptive fault-tolerant vibration control of single-link flexible manipulator. Trans. Inst. Meas. Control 2020, 42, 430–438. [Google Scholar] [CrossRef]
- Zhang, S.; Yang, P.; Kong, L.; Li, G.; He, W. A Single Parameter-Based Adaptive Approach to Robotic Manipulators with Finite Time Convergence and Actuator Fault. IEEE Access 2020, 8, 15123–15131. [Google Scholar] [CrossRef]
- Wang, J.; Liu, Z.; Chen, C.L.P.; Zhang, Y. Fuzzy Adaptive Compensation Control of Uncertain Stochastic Nonlinear Systems with Actuator Failures and Input Hysteresis. IEEE Trans. Cybern. 2019, 49, 2–13. [Google Scholar] [CrossRef] [PubMed]
- Zhang, S.; Yang, P.; Kong, L.; Chen, W.; Fu, Q.; Peng, K. Neural Networks-Based Fault Tolerant Control of a Robot via Fast Terminal Sliding Mode. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 4091–4101. [Google Scholar] [CrossRef]
- Liu, L.; Liu, Y.J.; Tong, S. Neural Networks-Based Adaptive Finite-Time Fault-Tolerant Control for a Class of Strict-Feedback Switched Nonlinear Systems. IEEE Trans. Cybern. 2019, 49, 2536–2545. [Google Scholar] [CrossRef] [PubMed]
- Ren, Y.; Zhu, P.; Zhao, Z.; Yang, J.; Zou, T. Adaptive Fault-Tolerant Boundary Control for a Flexible String with Unknown Dead Zone and Actuator Fault. IEEE Trans. Cybern. 2021, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Hu, Q.; Shao, X.; Guo, L. Adaptive Fault-Tolerant Attitude Tracking Control of Spacecraft with Prescribed Performance. IEEE/ASME Trans. Mechatron. 2018, 23, 331–341. [Google Scholar] [CrossRef]
- Wang, H.; Liu, P.X.; Zhao, X.; Liu, X. Adaptive Fuzzy Finite-Time Control of Nonlinear Systems with Actuator Faults. IEEE Trans. Cybern. 2020, 50, 1786–1797. [Google Scholar] [CrossRef]
- Liu, L.; Wang, Z.; Zhang, H. Adaptive NN fault-tolerant control for discrete-time systems in triangular forms with actuator fault. Neurocomputing 2015, 152, 209–221. [Google Scholar] [CrossRef]
- Van, M.; Ge, S.S.; Ren, H. Finite Time Fault Tolerant Control for Robot Manipulators Using Time Delay Estimation and Continuous Nonsingular Fast Terminal Sliding Mode Control. IEEE Trans. Cybern. 2017, 47, 1681–1693. [Google Scholar] [CrossRef]
- Zhang, D.; Li, J.; Lu, B.; Ding, S.X.; Wang, Z.; Zhao, C. Satisfactory fault tolerant control with soft-constraint for discrete time-varying systems: Numerical recursive approach. J. Frankl. Inst. 2017, 354, 1109–1137. [Google Scholar] [CrossRef]
- Liu, Y.; Jin, Z.; Ming, P.U. A Finite-Time Back-Stepping Dynamic Surface Control. J. Beijing Univ. Posts Telecommun. 2019, 42, 74–80. [Google Scholar]
- Yu, X.; Man, Z. Fast terminal sliding-mode control design for nonlinear dynamical systems. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 2002, 49, 261–264. [Google Scholar] [CrossRef]
- Van, M. An Enhanced Robust Fault Tolerant Control Based on an Adaptive Fuzzy PID-Nonsingular Fast Terminal Sliding Mode Control for Uncertain Nonlinear Systems. IEEE/ASME Trans. Mechatron. 2018, 23, 1362–1371. [Google Scholar] [CrossRef] [Green Version]
- Van, M.; Kang, H.J. Robust fault-tolerant control for uncertain robot manipulators based on adaptive quasi-continuous high-order sliding mode and neural network. Arch. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2015, 229, 1425–1446. [Google Scholar] [CrossRef]
- Wen, C.; Zhou, J.; Liu, Z.; Su, H. Robust Adaptive Control of Uncertain Nonlinear Systems in the Presence of Input Saturation and External Disturbance. IEEE Trans. Autom. Control 2011, 56, 1672–1678. [Google Scholar] [CrossRef]
- He, W.; Ge, S.S.; Li, Y.; Chew, E.; Ng, Y.S. Neural Network Control of a Rehabilitation Robot by State and Output Feedback. J. Intell. Robot. Syst. 2015, 80, 15–31. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Description | Value |
|---|---|---|
| Mass of link 1 | 2.00 kg | |
| Mass of link 2 | 0.85 kg | |
| Length of link 1 | 0.35 m | |
| Length of link 2 | 0.31 m | |
| Moment of inertia of link 1 | kgm2 | |
| Moment of inertia of link 2 | kgm2 |
| Parameter | [rad] | [rad] |
|---|---|---|
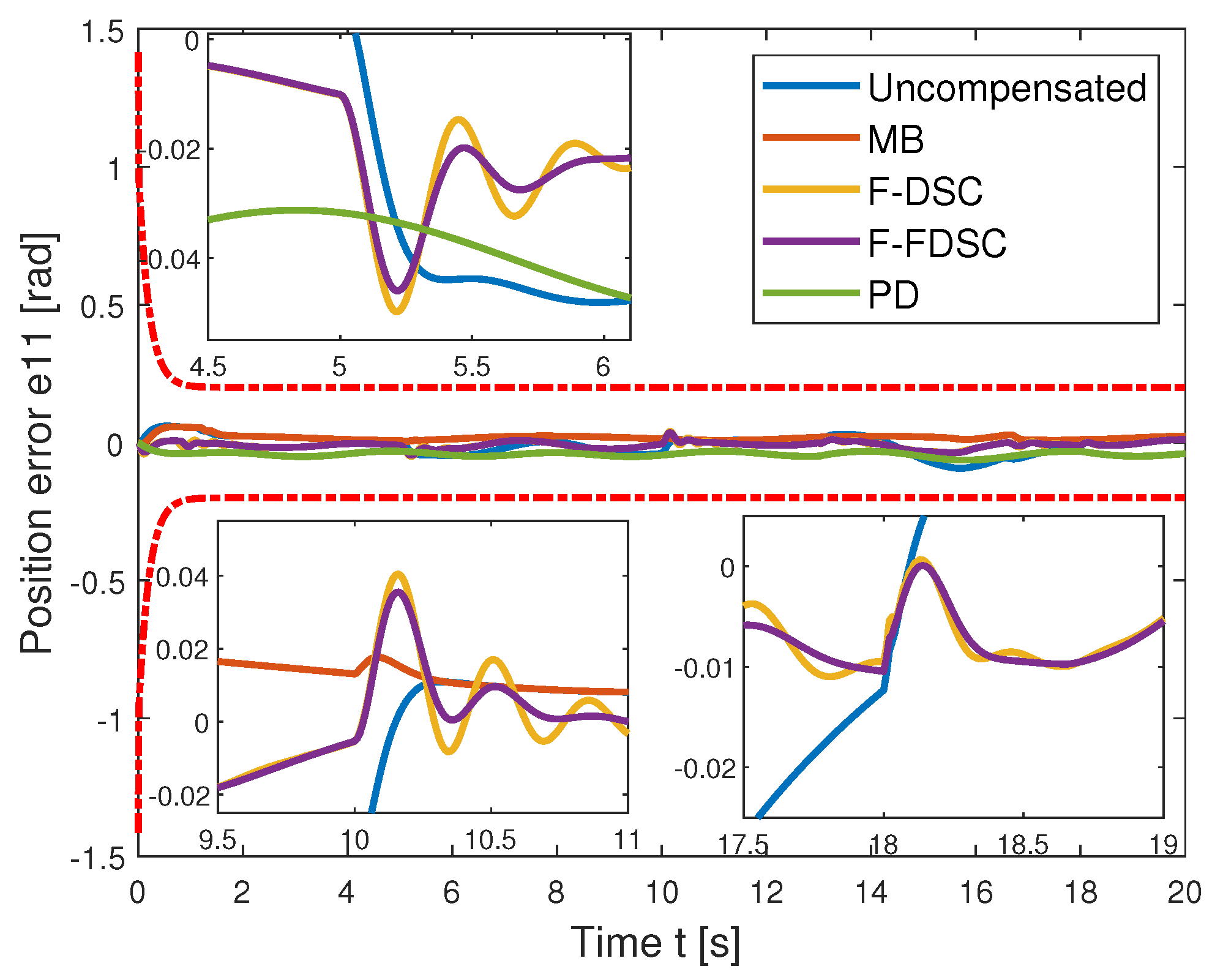
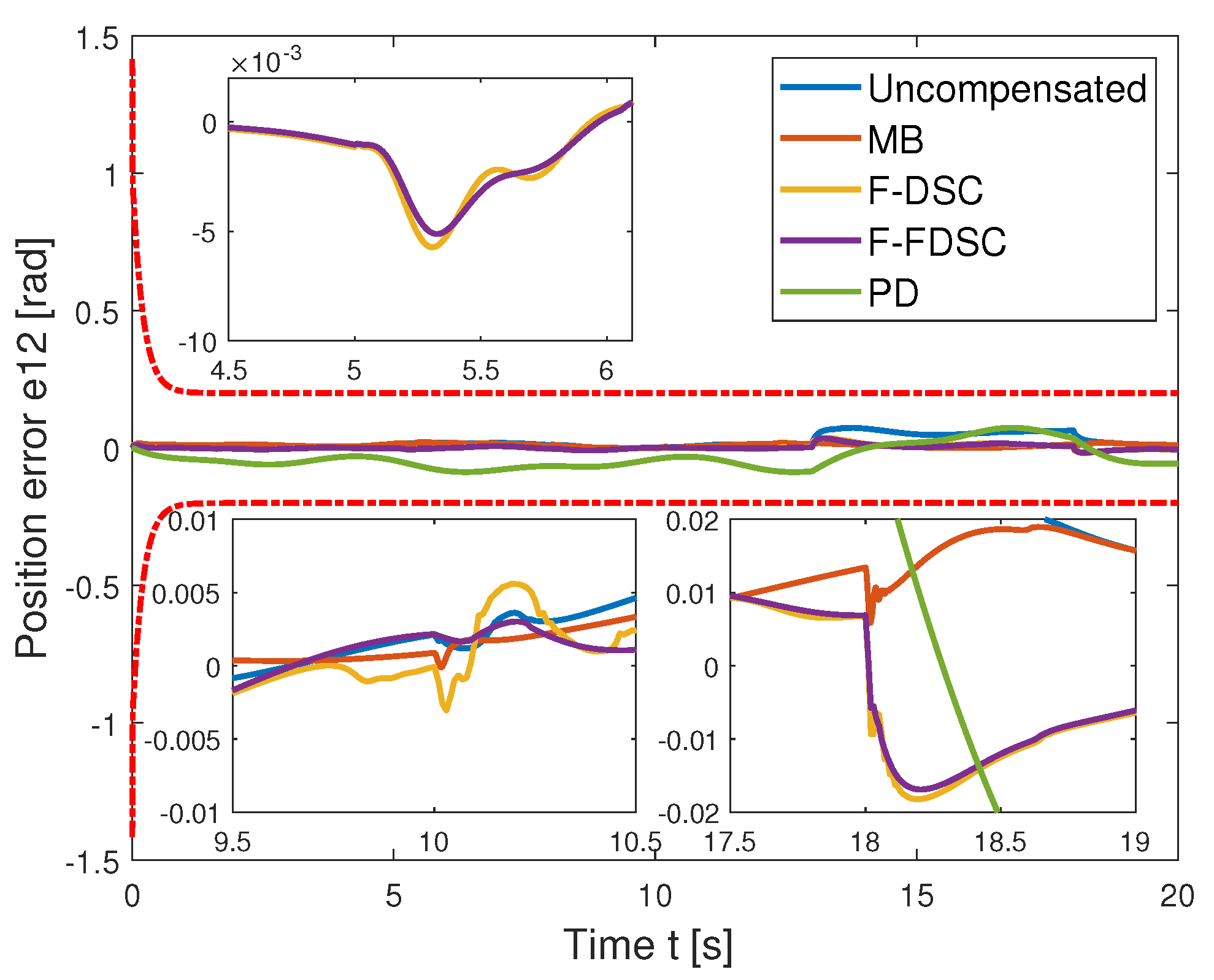
| Uncompensated | 0.0936 | 0.0738 |
| MB | 0.0282 | 0.0245 |
| F-DSC | 0.0498 | 0.0366 |
| F-FDSC | 0.0460 | 0.0360 |
| PD | 0.0635 | 0.0872 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Z.; Peng, L.; Zhang, J.; Wang, X. Finite-Time Neural Network Fault-Tolerant Control for Robotic Manipulators under Multiple Constraints. Electronics 2022, 11, 1343. https://doi.org/10.3390/electronics11091343
Zhang Z, Peng L, Zhang J, Wang X. Finite-Time Neural Network Fault-Tolerant Control for Robotic Manipulators under Multiple Constraints. Electronics. 2022; 11(9):1343. https://doi.org/10.3390/electronics11091343
Chicago/Turabian StyleZhang, Zhao, Lingxi Peng, Jianing Zhang, and Xiaowei Wang. 2022. "Finite-Time Neural Network Fault-Tolerant Control for Robotic Manipulators under Multiple Constraints" Electronics 11, no. 9: 1343. https://doi.org/10.3390/electronics11091343