
Super-Twisting Sliding Mode Control for Differential Steering Systems in Vehicular Yaw Tracking Motion



Abstract
:1. Introduction
- Modelling of vehicle and tyre dynamics;
- Showcasing the advantages of the STA compared to SMC.
Literature Review
2. Vehicle Model
2.1. Tyre Forces
2.1.1. Lateral Tyre Forces
2.1.2. Longitudinal Tyre Forces
2.1.3. Nominal Cornering Stiffness
2.2. Electric Motor
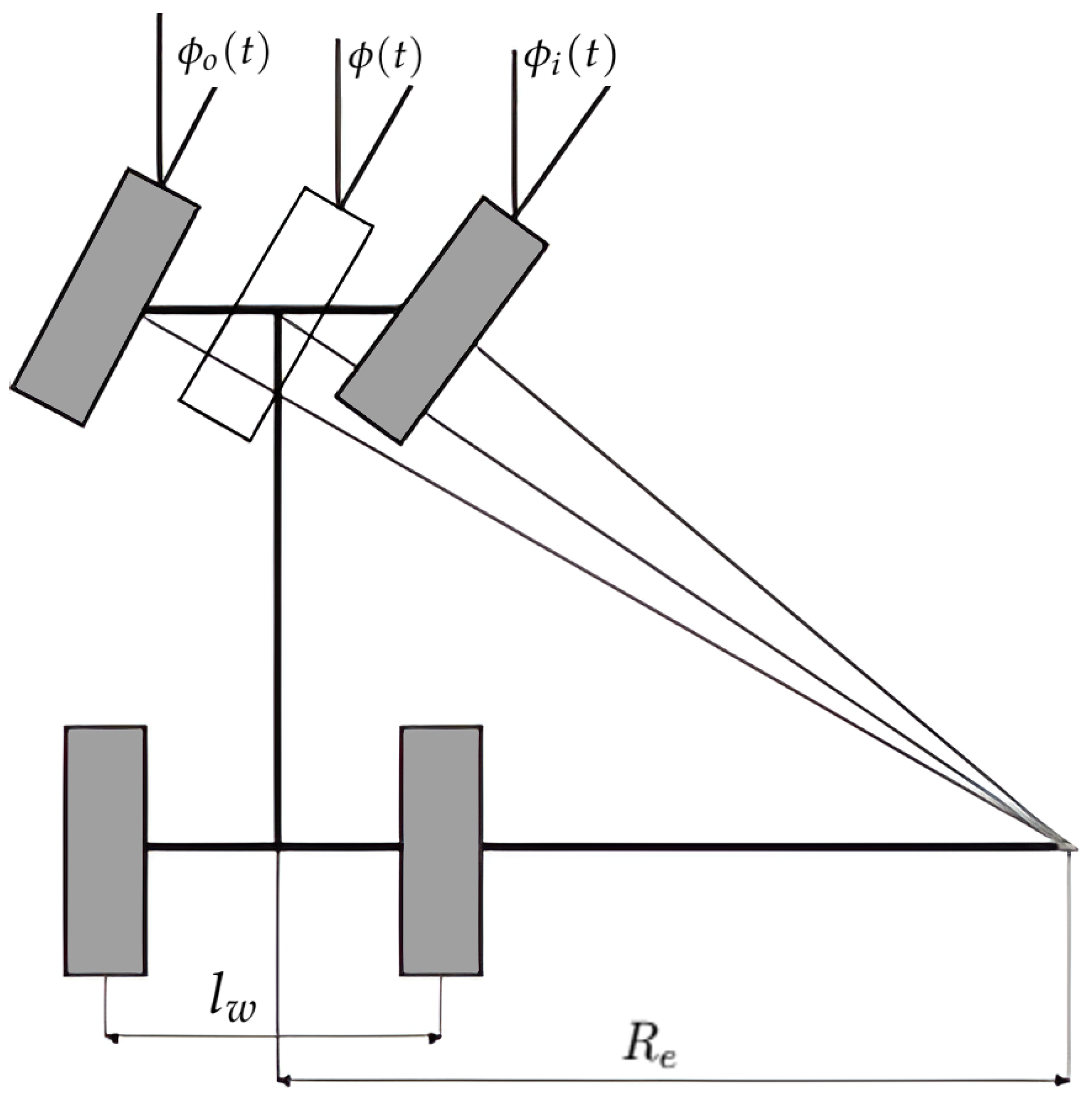
2.3. Ackermann Steering
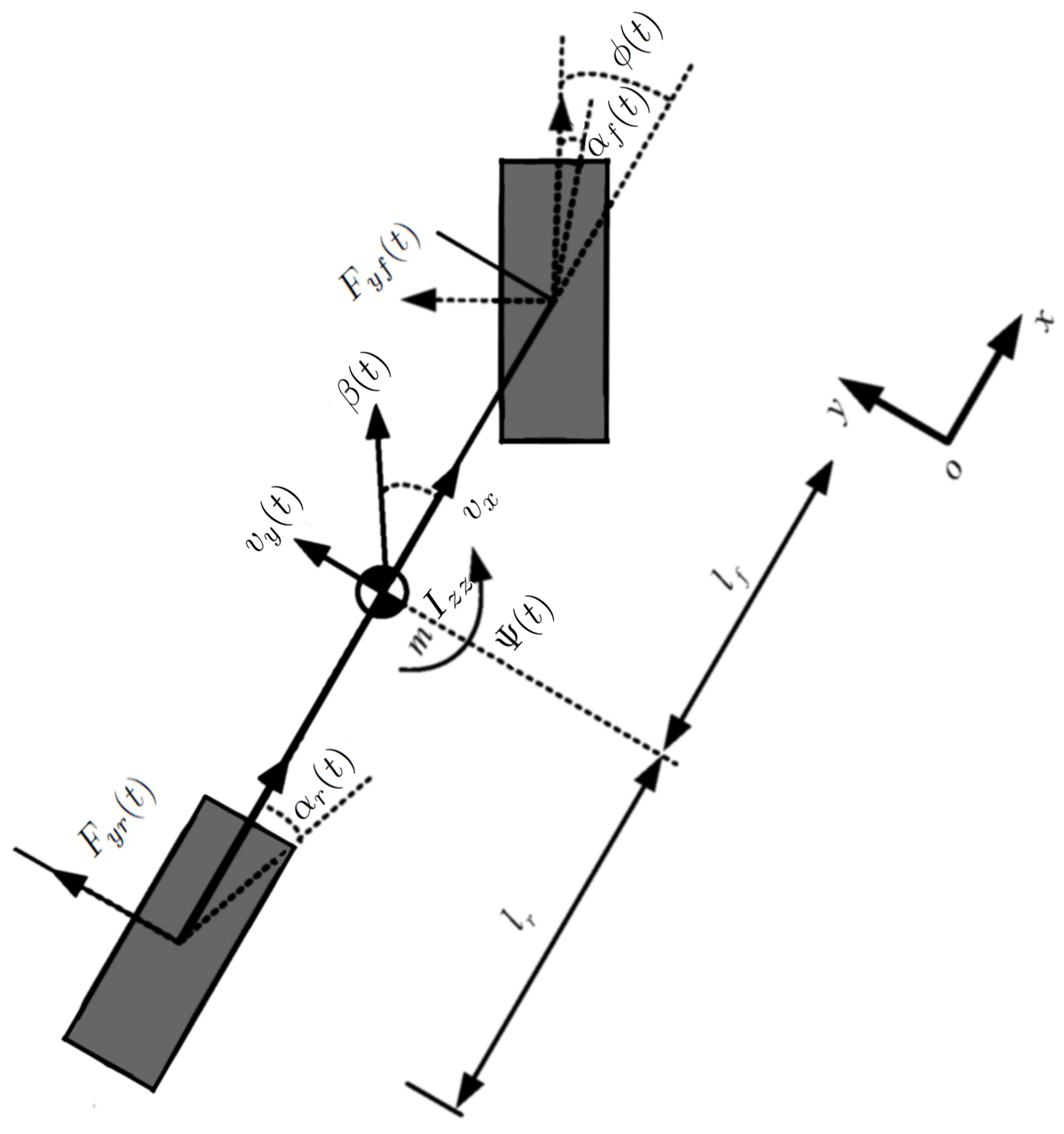
2.4. Single-Track Model
2.5. Self-Steering Gradient
- under-steering;
- neutral;
- oversteering.
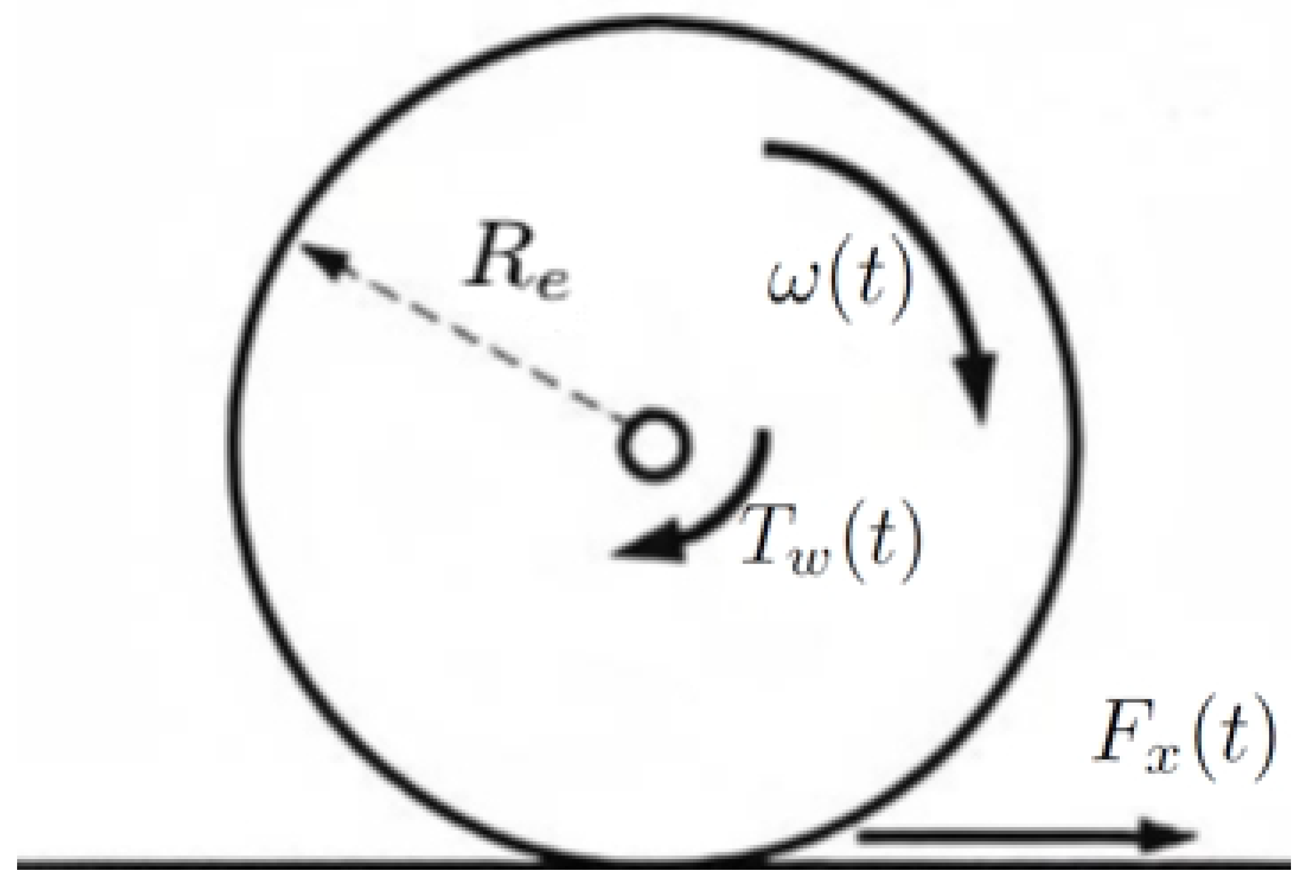
2.6. Wheel Rational Dynamics
Correction Momentum and Torque
3. Sliding Mode Control
4. Analysis and Discussion of the Results
4.1. Simulation of an Uncontrolled and Undisturbed System
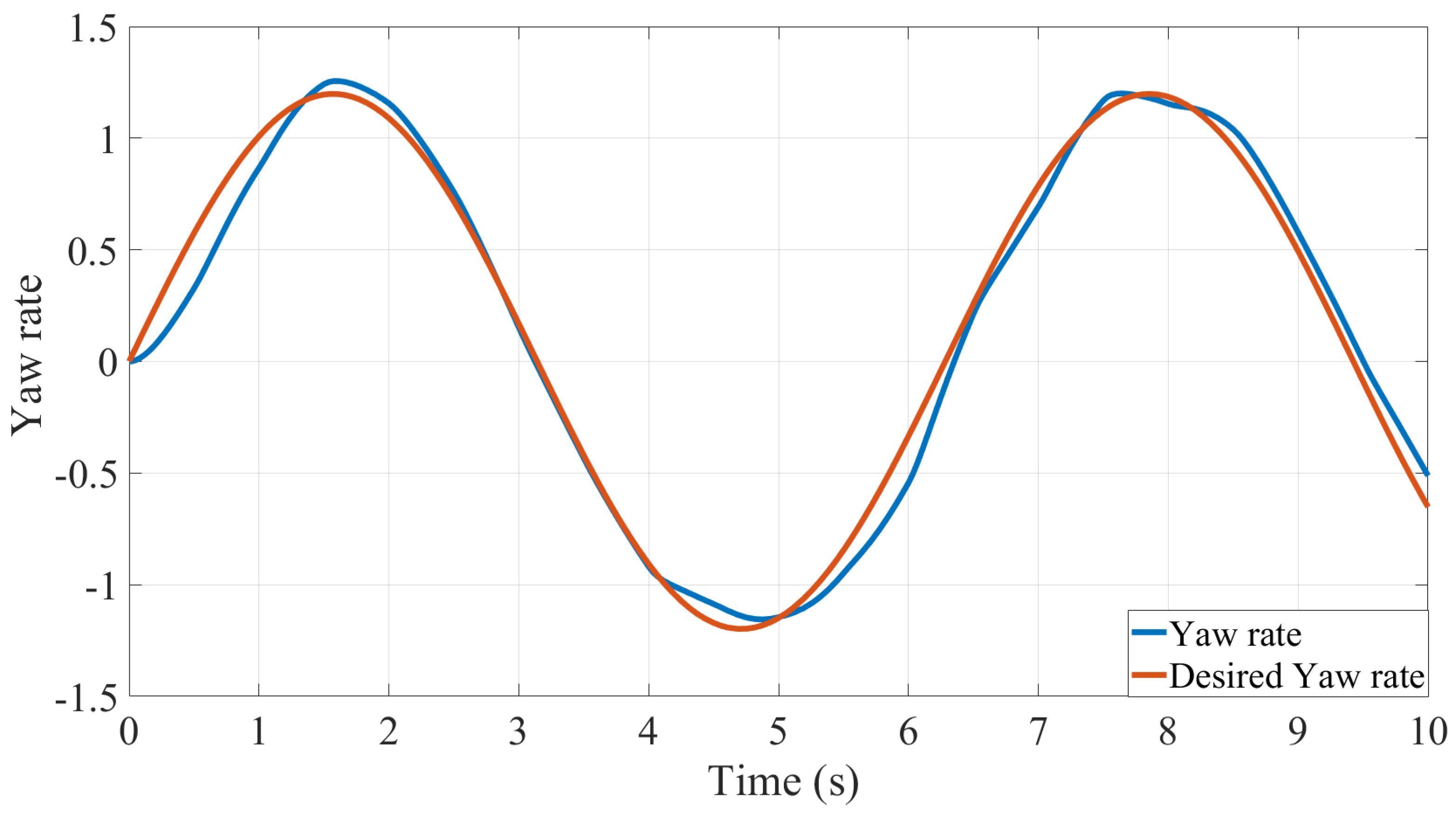
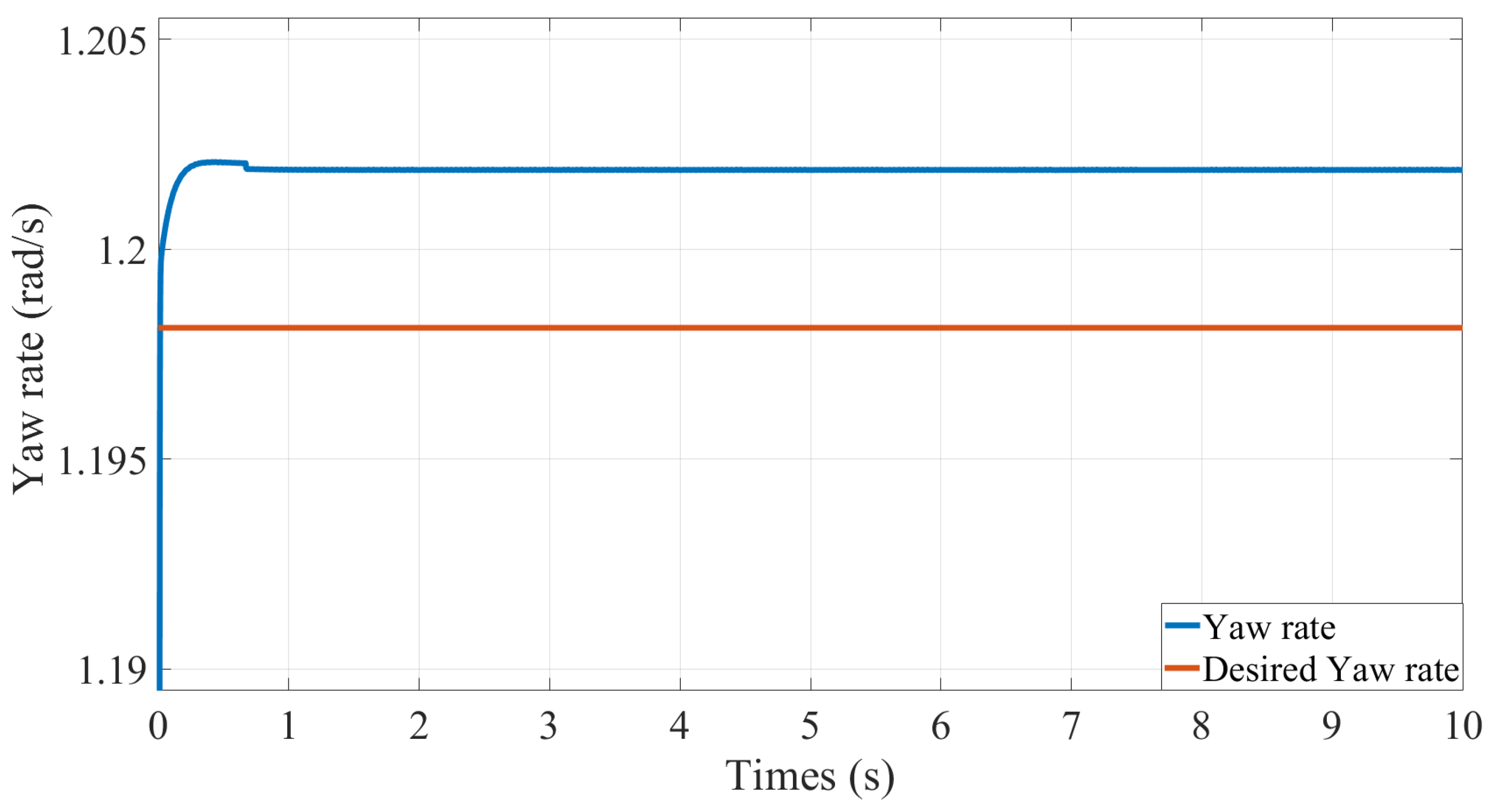
4.2. Simulation of a Controlled Undisturbed System
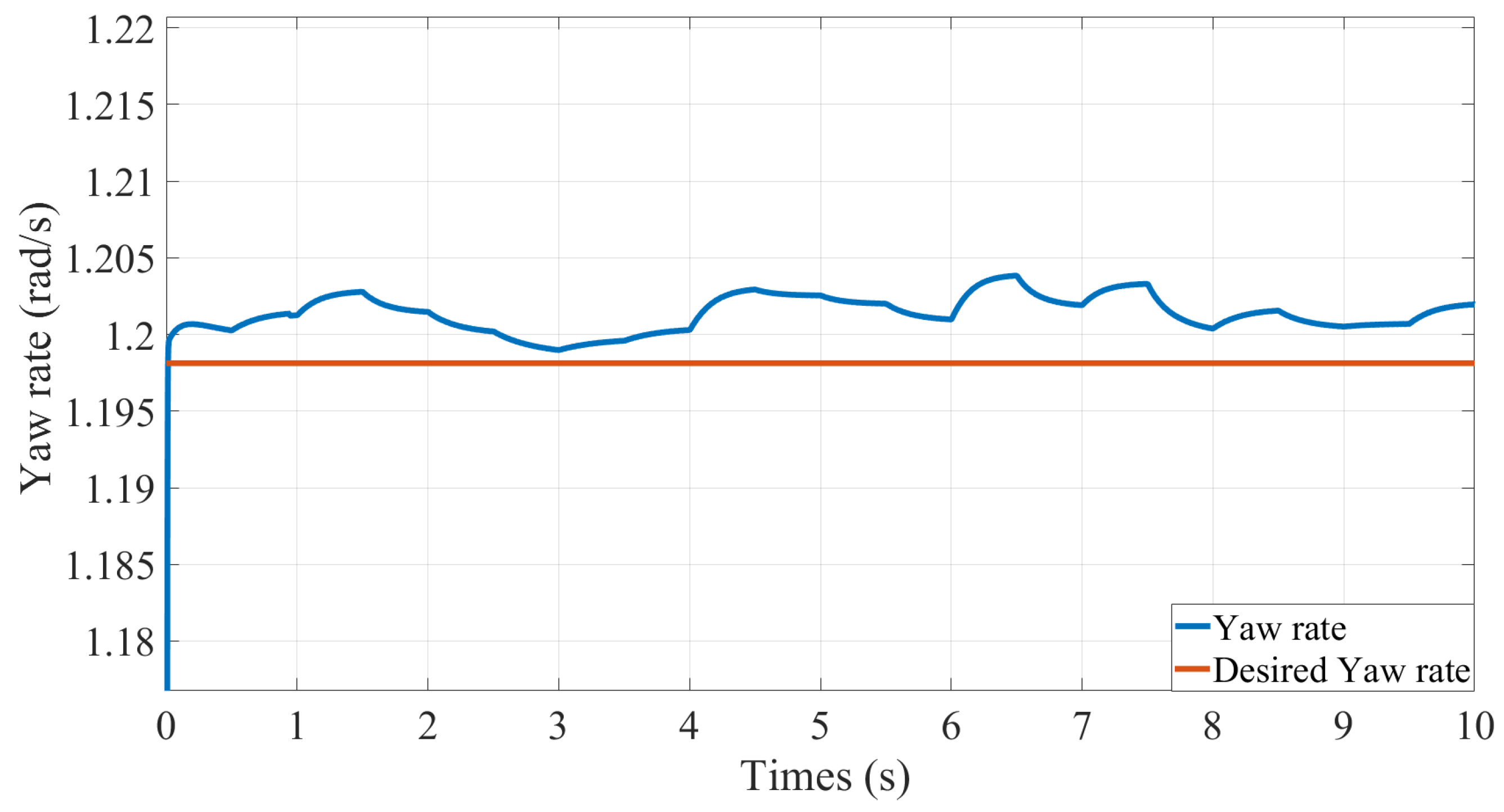
4.3. Simulation of a Controlled and Disturbed System
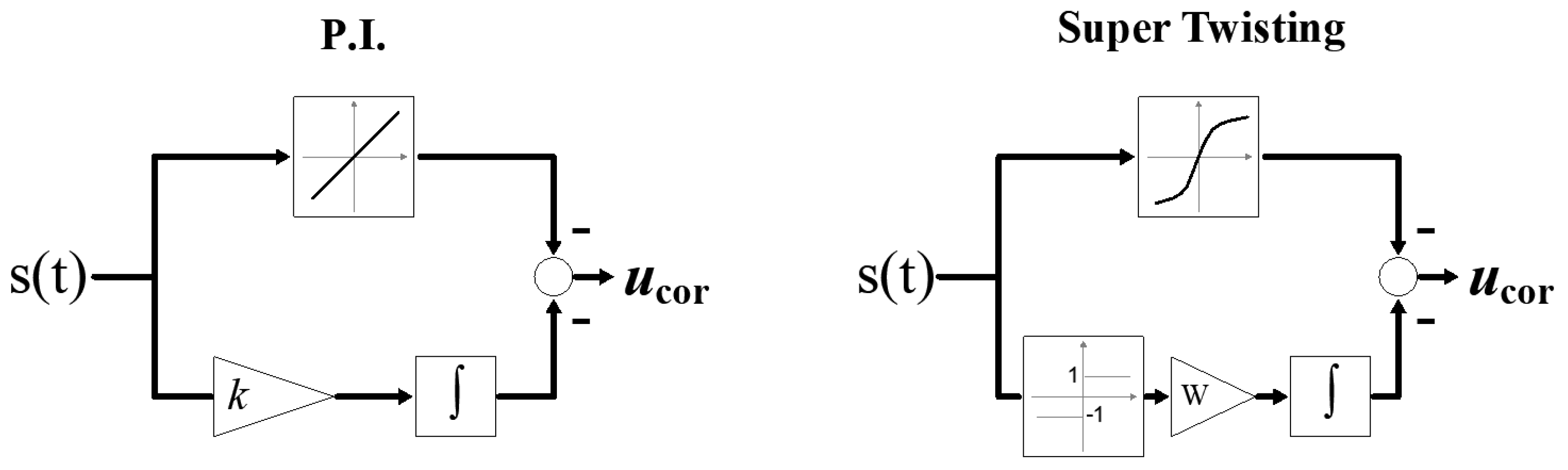
PI Controller vs. SMC Super-Twisting
4.4. SMC vs. STA
4.4.1. SMC with Known Upper Bounds
4.4.2. Achievability
4.4.3. SMC and STA with Underestimated Correctiveness
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| Magic Tyre Formula | |
| Induction Motor | |
| Self-Steering Gradient | |
| Sliding Mode Control | |
| Super-Twisting Algorithm |
References
- De Novellis, L.; Sorniotti, A.; Gruber, P. Wheel Torque Distribution Criteria for Electric Vehicles with Torque-Vectoring Differentials. IEEE Trans. Veh. Technol. 2014, 63, 1593–1602. [Google Scholar] [CrossRef] [Green Version]
- Pacejka, H.B. Tyre and Vehicle Dynamics; Butterworth-Heinemann: Oxford, UK, 2006. [Google Scholar]
- Riekert, P.; Schunck, T. Zur Fahrmechanik des gummibereiften Kraftfahrzeugs. Ingenieur-Archiv 1940, 11, 210–224. [Google Scholar] [CrossRef]
- von Vietinghoff, A. Nichtlineare Regelung von Kraftfahrzeugen in Querdynamisch Kritischen Fahrsituationen; Universitätsverlag Karlsruhe: Karlsruhe, Germany, 2008. [Google Scholar]
- Bahram, A. Induction Motors Analysis and Torque Control; Springer: Berlin/Heidelberg, Germany, 2001. [Google Scholar]
- Utkin, V.I. Variable Structure Systems with Sliding Modes. IEEE Trans. Autom. Control 1977, 22, 212–222. [Google Scholar] [CrossRef]
- Emelyanov, S.V. Automatische Regelsysteme Mit Veranderlicher Struktur Fahrsituationen; Oldenbourg: Munich, Germany, 1969. [Google Scholar]
- Lyapunov, A.M. The General Problem of the Stability of Motion; CRC Press: Boca Raton, FL, USA, 1992. [Google Scholar]
- Slotine, J.J.E.; Li, W. Applied Nonlinear Control; Pearson: Upper Saddle River, NJ, USA, 1991. [Google Scholar]
- Liu, J.; Wang, X. Advanced Sliding Mode Control. In Advanced Sliding Mode Control for Mechanical Systems: Design, Analysis and MATLAB Simulation; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Mercorelli, P. An Anti-Saturating Adaptive Preaction and a Slide Surface to Achieve Soft Landing Control for Electromagnetic Actuators. IEEE/ASME Trans. Mechatron. 2012, 17, 76–85. [Google Scholar] [CrossRef]
- Liu, J.; Li, H.; Deng, Y. Torque Ripple Minimization of PMSM Based on Robust ILC Via Adaptive Sliding Mode Control. IEEE Trans. Power Electron. 2018, 33, 3655–3671. [Google Scholar] [CrossRef]
- Jezernik, K.; Korelič, J.; Horvat, R. PMSM sliding mode FPGA-based control for torque ripple reduction. IEEE Trans. Power Electron. 2013, 28, 3549–3556. [Google Scholar] [CrossRef]
- Haus, B.; Röhl, J.H.; Mercorelli, P.; Aschemann, H. Model Predictive Control for Switching Gain Adaptation in a Sliding Mode Controller of a DC Drive with Nonlinear Friction. In Proceedings of the 2018 22nd International Conference on System Theory, Control and Computing (ICSTCC), Sinaia, Romania, 10–12 October 2018; pp. 765–770. [Google Scholar] [CrossRef]
- Haus, B.; Mercorelli, P.; Aschemann, H. Gain Adaptation in Sliding Mode Control Using Model Predictive Control and Disturbance Compensation with Application to Actuators. Information 2019, 10, 182. [Google Scholar] [CrossRef] [Green Version]
- Mercorelli, P.; Haus, B.; Zattoni, E.; Aschemann, H.; Ferrara, A. Robust Current Decoupling in a Permanent Magnet Motor Combining a Geometric Method and SMC. In Proceedings of the 2018 IEEE Conference on Control Technology and Applications (CCTA), Copenhagen, Denmark, 21–24 August 2018; pp. 939–944. [Google Scholar] [CrossRef]
- Haus, B.; Aschemann, H.; Mercorelli, P.; Werner, N. Nonlinear modelling and sliding mode control of a piezo-hydraulic valve system. In Proceedings of the 2016 21st International Conference on Methods and Models in Automation and Robotics (MMAR), Miedzyzdroje, Poland, 29 August–1 September 2016; pp. 442–447. [Google Scholar] [CrossRef]
- Aschemann, H.; Haus, B.; Mercorelli, P. Sliding Mode Control and Observer-Based Disturbance Compensation for a Permanent Magnet Linear Motor. In Proceedings of the 2018 Annual American Control Conference (ACC), Milwaukee, WI, USA, 27–29 June 2018; pp. 4141–4146. [Google Scholar] [CrossRef]
- Dimna Denny, C.; Ramesh Kumar, P.; Jasmin, E.A. Super Twisting Algorithm Based Slip Ratio Control of Electric Vehicles. In Proceedings of the 2020 IEEE International Power and Renewable Energy Conference, Karunagappally, India, 30 October–1 November 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Xu, C.; Wang, K.; Wang, Y.; Chen, C.; Zhang, B. Super-Twisting Sliding Mode Control of Permanent Magnet Synchronous Motor Based on Predictive Adaptive Law. In Proceedings of the 2021 IEEE 5th Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 12–14 March 2021; Volume 5, pp. 2731–2736. [Google Scholar] [CrossRef]
- Benariba, H.; Boumédiène, A. Super twisting sliding mode control of an electric vehicle. In Proceedings of the 2015 3rd International Conference on Control, Engineering Information Technology (CEIT), Tlemcen, Algeria, 25–27 May 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Liu, Y.C.; Laghrouche, S.; N’Diaye, A.; Cirrincione, M. Hermite neural network-based second-order sliding-mode control of synchronous reluctance motor drive systems. J. Frankl. Inst. 2021, 358, 400–427. [Google Scholar] [CrossRef]
- Biricik, S.; Komurcugil, H.; Ahmed, H.; Babaei, E. Super Twisting Sliding-Mode Control of DVR With Frequency-Adaptive Brockett Oscillator. IEEE Trans. Ind. Electron. 2021, 68, 10730–10739. [Google Scholar] [CrossRef]
- Tran, M.T.; Lee, D.H.; Chakir, S.; Kim, Y.B. A Novel Adaptive Super-Twisting Sliding Mode Control Scheme with Time-Delay Estimation for a Single Ducted-Fan Unmanned Aerial Vehicle. Actuators 2021, 10, 54. [Google Scholar] [CrossRef]
- Milliken, W.F. Race Car Vehicle Dynamics; Society of Automotive Engineers: Warendale, PA, USA, 1995. [Google Scholar]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Coefficient | Influence | Unit | Typical Range |
|---|---|---|---|
| Shape factor | 1.2–1.8 | ||
| Load influence on lateral friction coefficient | −80–80 | ||
| Lateral friction coefficient | 900–1700 | ||
| Change of stiffness with slip | 500–2000 | ||
| Change of progressivity of stiffness/load | 0–50 | ||
| Curvature change with load | –2 | ||
| Curvature factor | –1 | ||
| Load influence on horizontal shift | –1 | ||
| Vertical shift | N | –200 | |
| Vertical shift at load | N | –10 |
| Coefficient | Influence | Unit | Typical Range |
|---|---|---|---|
| Shape factor | 1.4–1.8 | ||
| Load influence on longitudinal friction coefficient | –80 | ||
| Longitudinal friction coefficient | 900–1700 | ||
| Curvature factor of stiffness/load | –200 | ||
| Change of stiffness with slip | 100–500 | ||
| Change of progressivity of stiffness/load | –1 | ||
| Curvature change with load | –0.1 | ||
| Curvature change with load | –1 | ||
| Curvature factor | –1 |
| m | 2100 kg |
| 2800 kg m | |
| 2 m | |
| 15 m/s | |
| 3 m | |
| 80 N | |
| 1.8 m | |
| 75,000 | |
| 150,000 | |
| −15,000 |
| Pole Number | 6 |
| 50 Hz | |
| V | |
| 0.182 | |
| 0.990 | |
| 0.180 | |
| 7.4 |
| STA/SMC Overestimated | STA/SMC Underestimated | |
|---|---|---|
| U | 100 | 15 |
| k | 500 | 500 |
| PI Controller | ||
| P | −1000 | N/A |
| I | −800 | N/A |
| STA Overestimated | STA Underestimated | |
| Energetic error | 0.00558 | 0.002971 |
| Maximum error | 0.005 | 0.007 |
| SMC Overestimated | SMC Underestimated | |
| Energetic error | 0.002971 | 0.004319 |
| Maximum error | 0.001 | 0.007 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kruse, O.; Mukhamejanova, A.; Mercorelli, P. Super-Twisting Sliding Mode Control for Differential Steering Systems in Vehicular Yaw Tracking Motion. Electronics 2022, 11, 1330. https://doi.org/10.3390/electronics11091330
Kruse O, Mukhamejanova A, Mercorelli P. Super-Twisting Sliding Mode Control for Differential Steering Systems in Vehicular Yaw Tracking Motion. Electronics. 2022; 11(9):1330. https://doi.org/10.3390/electronics11091330
Chicago/Turabian StyleKruse, Oliver, Aidana Mukhamejanova, and Paolo Mercorelli. 2022. "Super-Twisting Sliding Mode Control for Differential Steering Systems in Vehicular Yaw Tracking Motion" Electronics 11, no. 9: 1330. https://doi.org/10.3390/electronics11091330