
A Machine Learning-Based Robust State of Health (SOH) Prediction Model for Electric Vehicle Batteries


Abstract
:1. Introduction
- I.
- The electric battery’s SOH model is resilient as a result of this research.
- II.
- The model behavior is accurate.
- III.
- Real-world battery systems can be analyzed and monitored using the model.
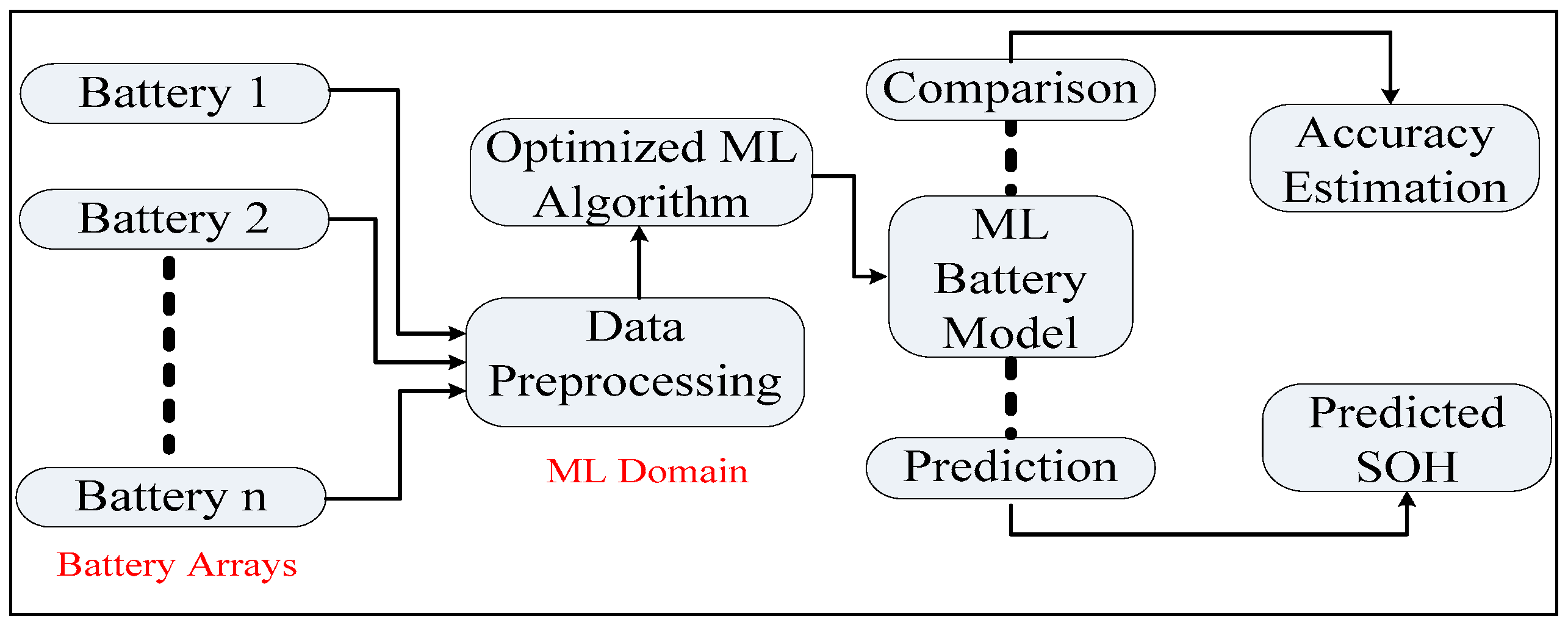
2. An Overview of the Proposed Method
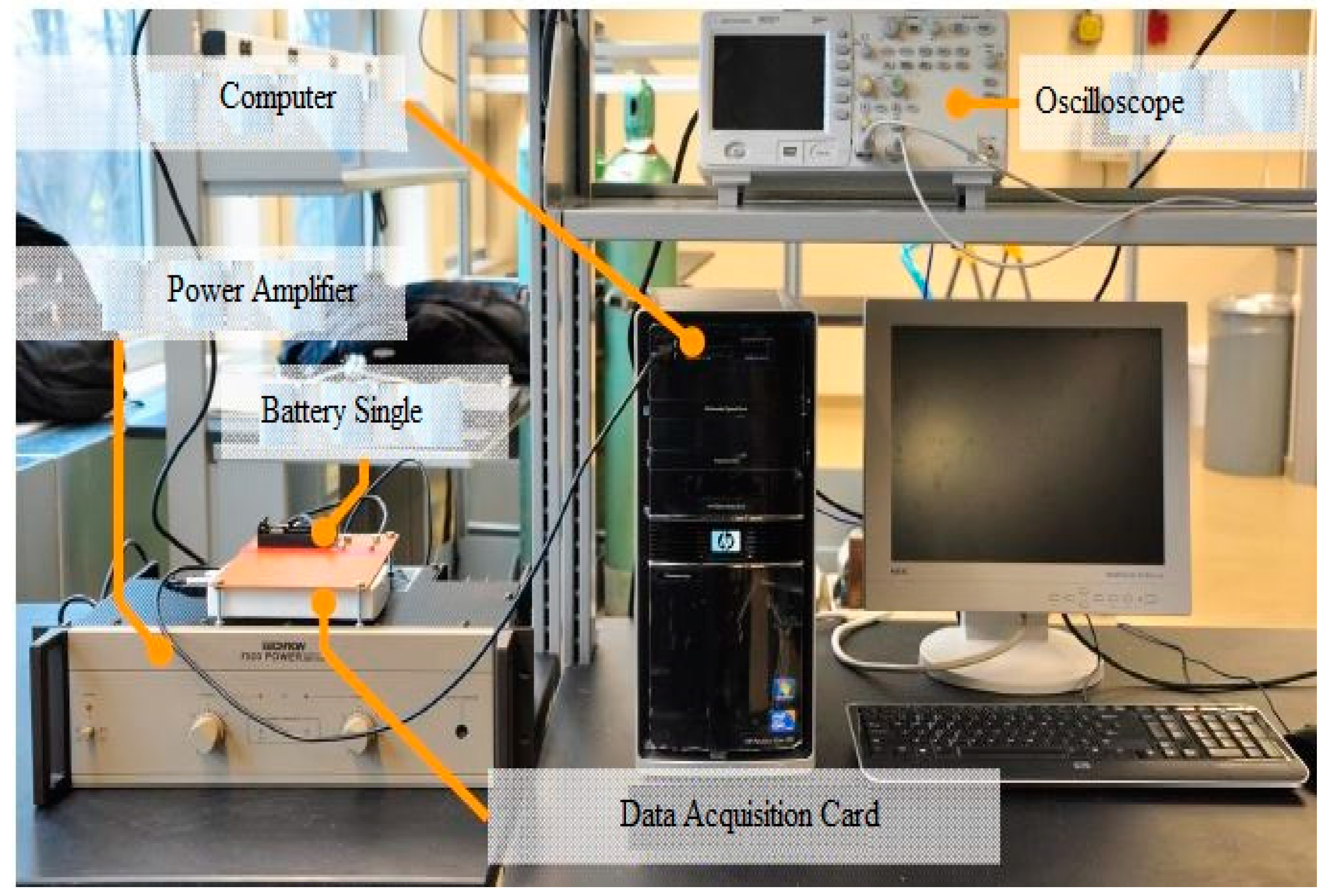
2.1. Hardware
2.2. Battery Arrays
2.3. Machine Learning (ML) Domain
2.3.1. Data Preprocessing
2.3.2. ML Algorithm Optimization
2.4. ML Battery Model
2.4.1. Prediction
2.4.2. Comparison
2.5. The Operational Algorithm
| Algorithm 1 | |
| 1: | obtain (battery data) |
| 2: | calculate (SOH from Charge Capacity) |
| 3: | while (data in each datasets) do |
| 4: | divide (data) |
| 5: | invoke (best ML algorithm) |
| 6: | create (model), verify (model) |
| 7: | return (model) |
| 8: | print (results) |
| 9: | end while |
| 10: | end of execution |
2.6. In-Field Vehicle Testing
3. Results and Discussion
3.1. Findings from the ML Method
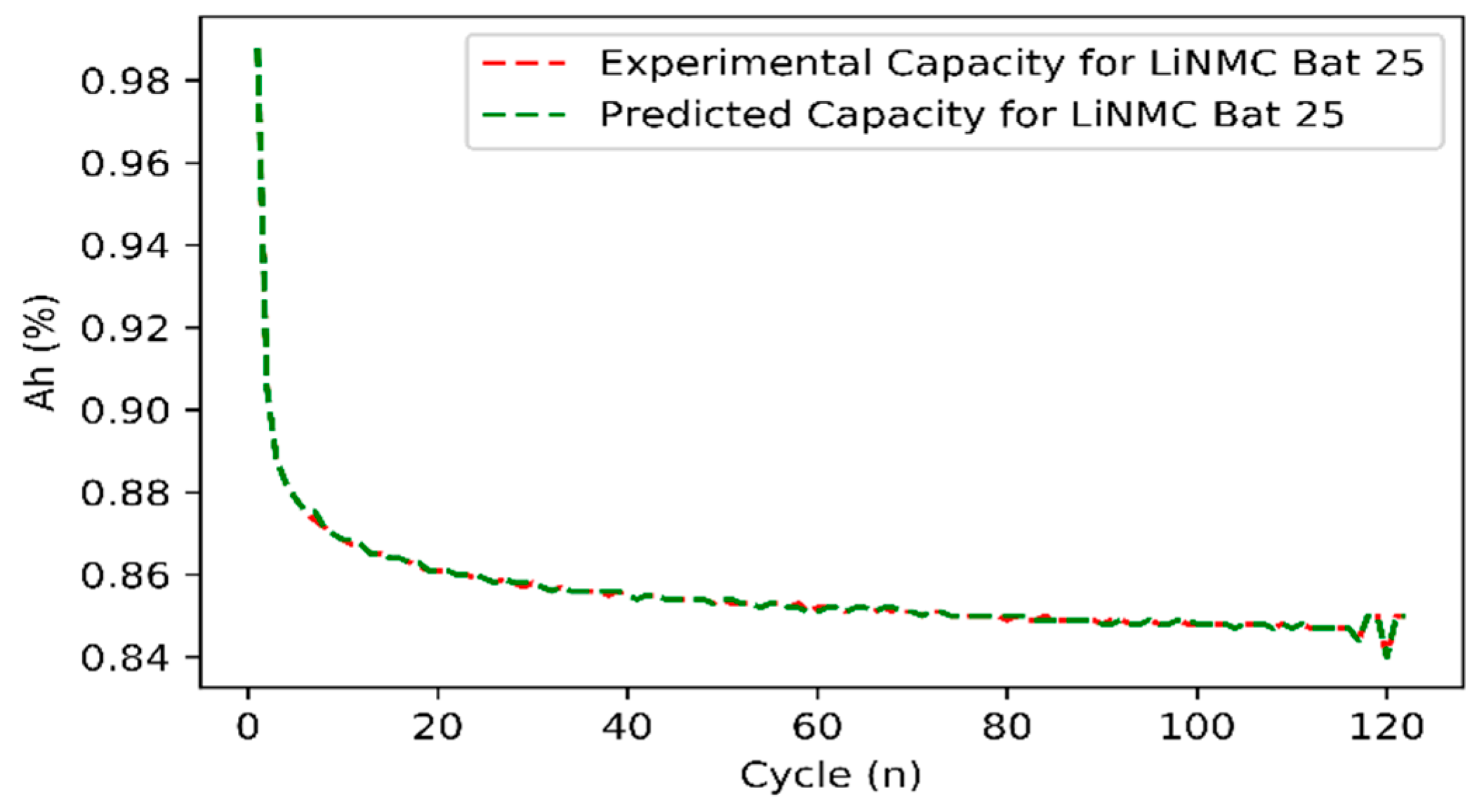
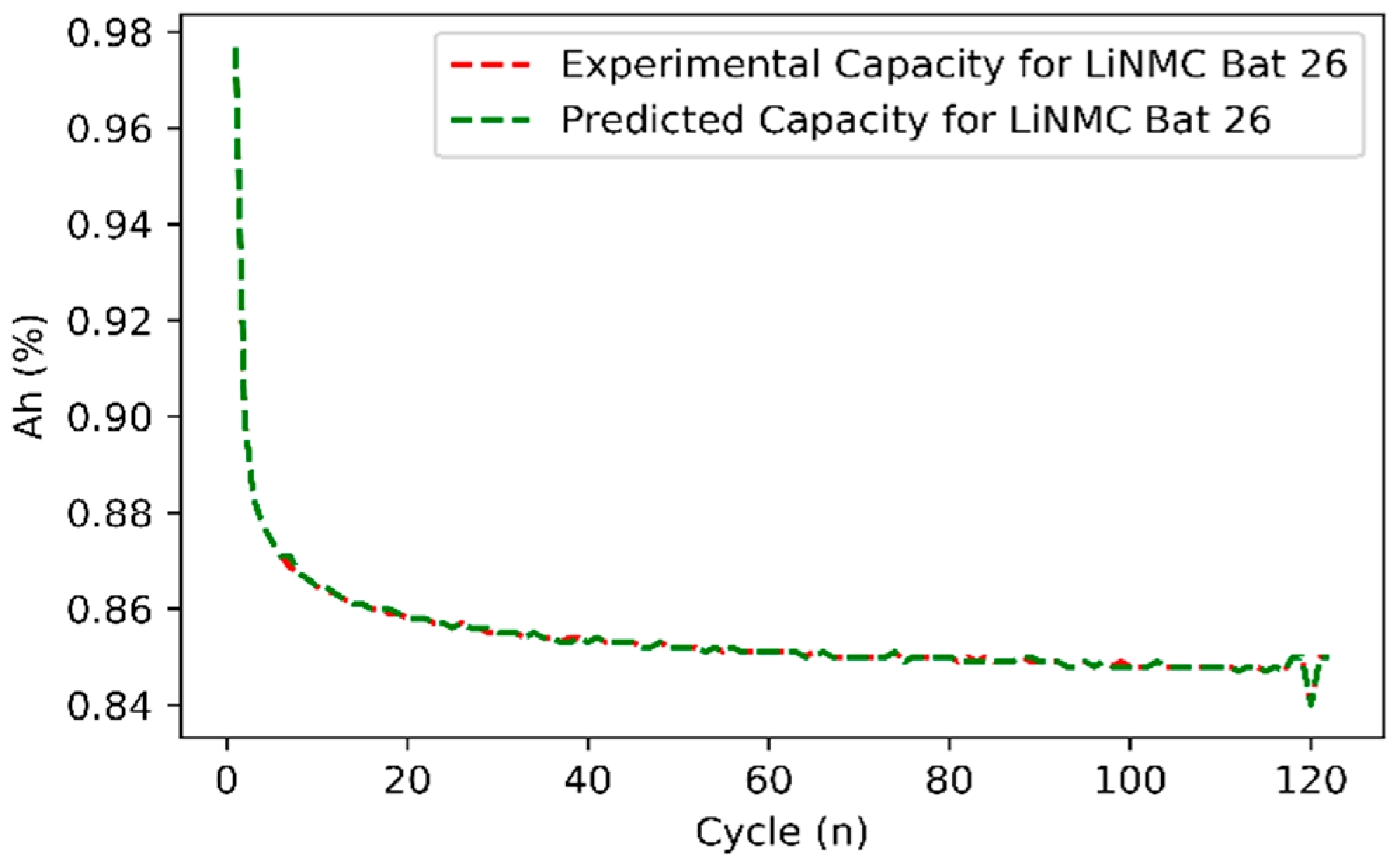
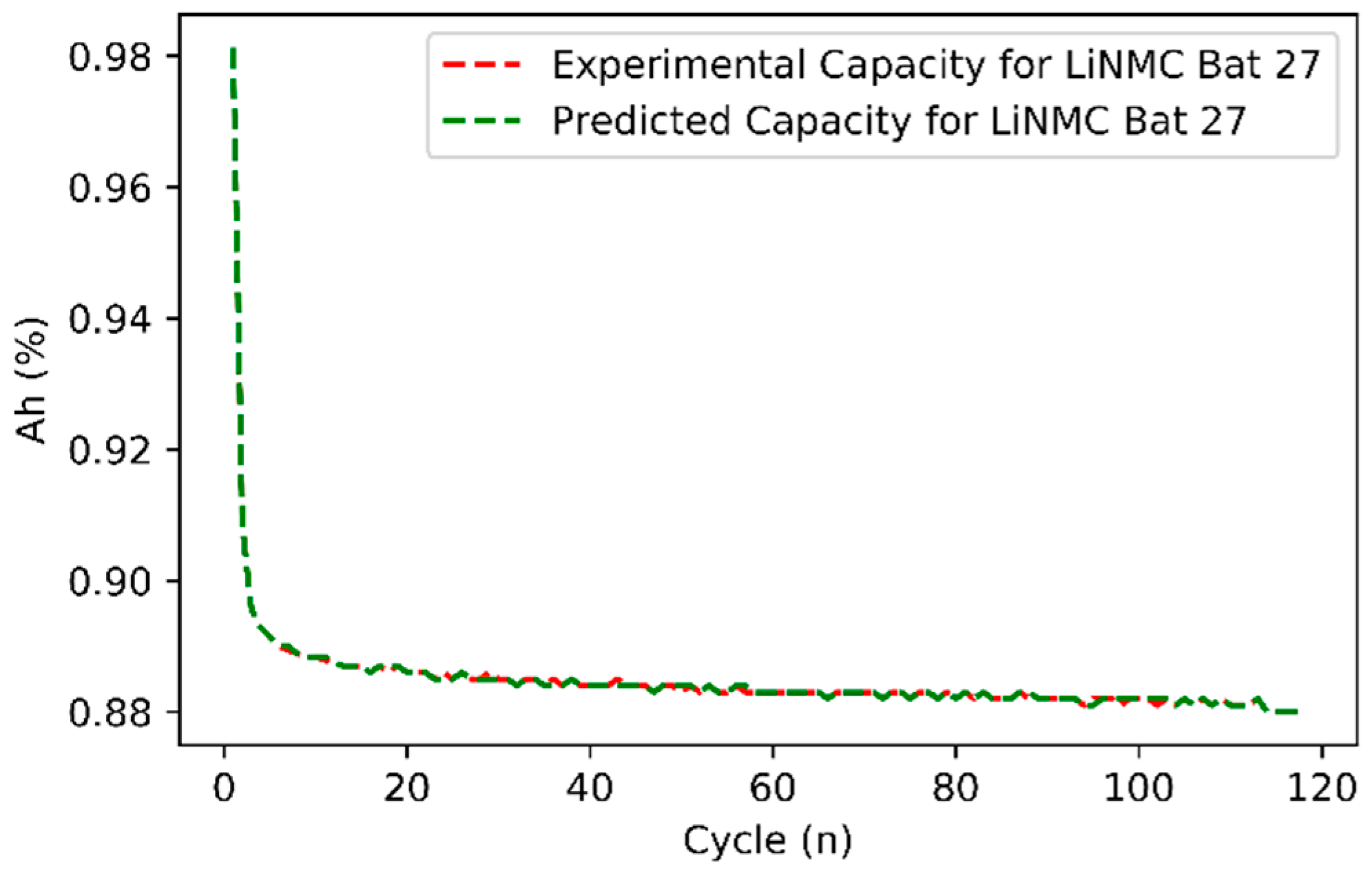
3.2. Results Related to Derived Capacity
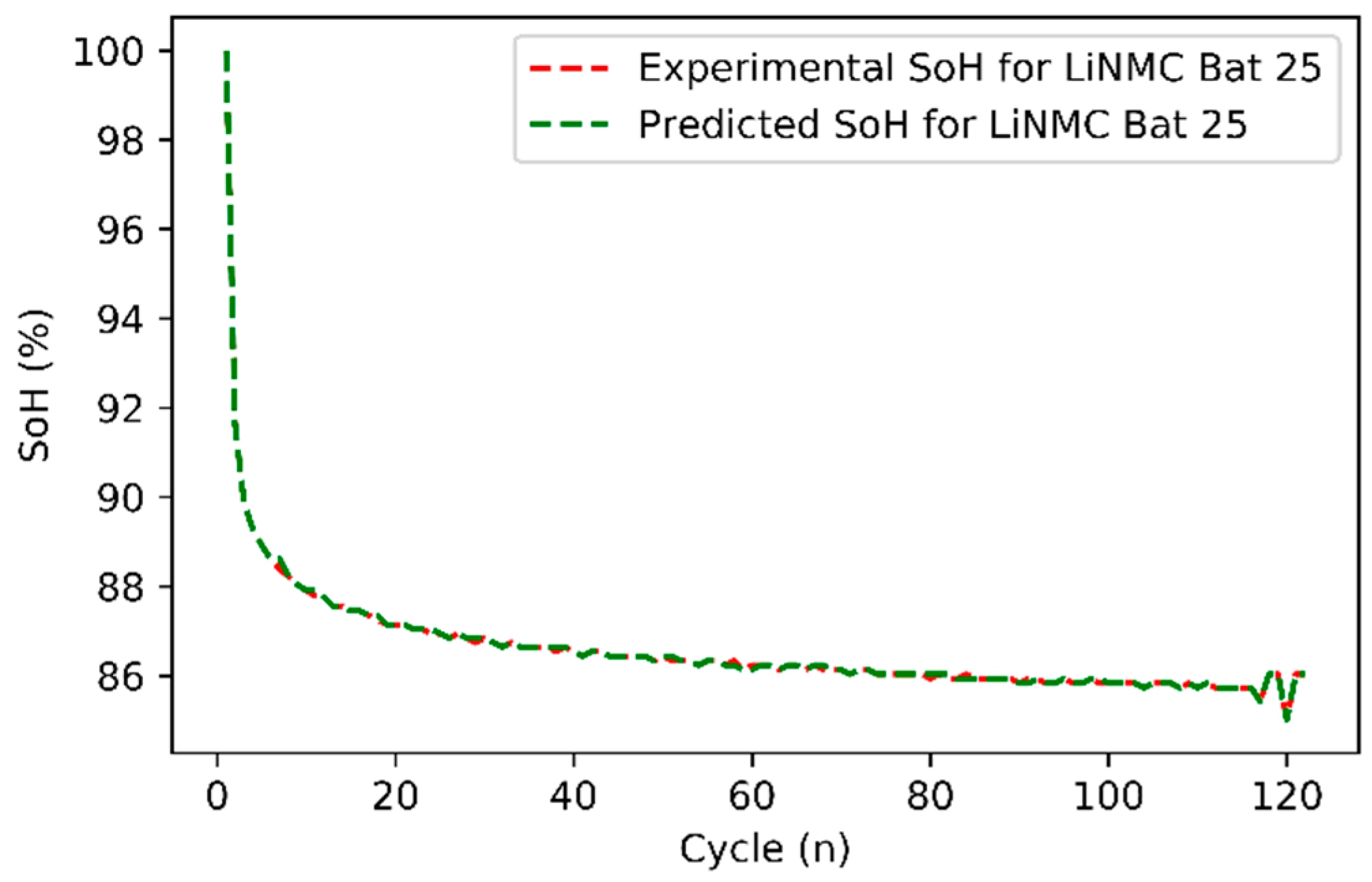
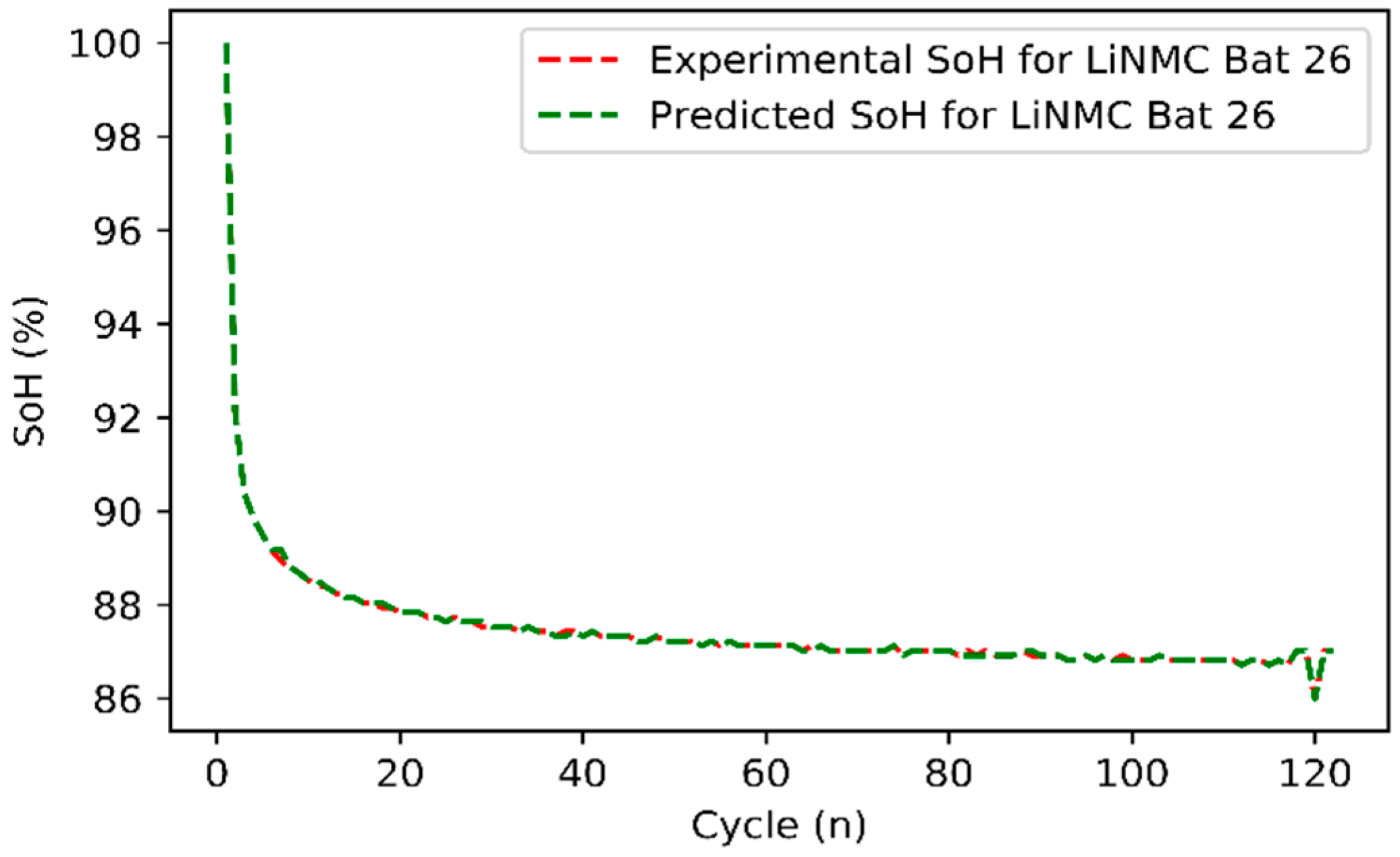
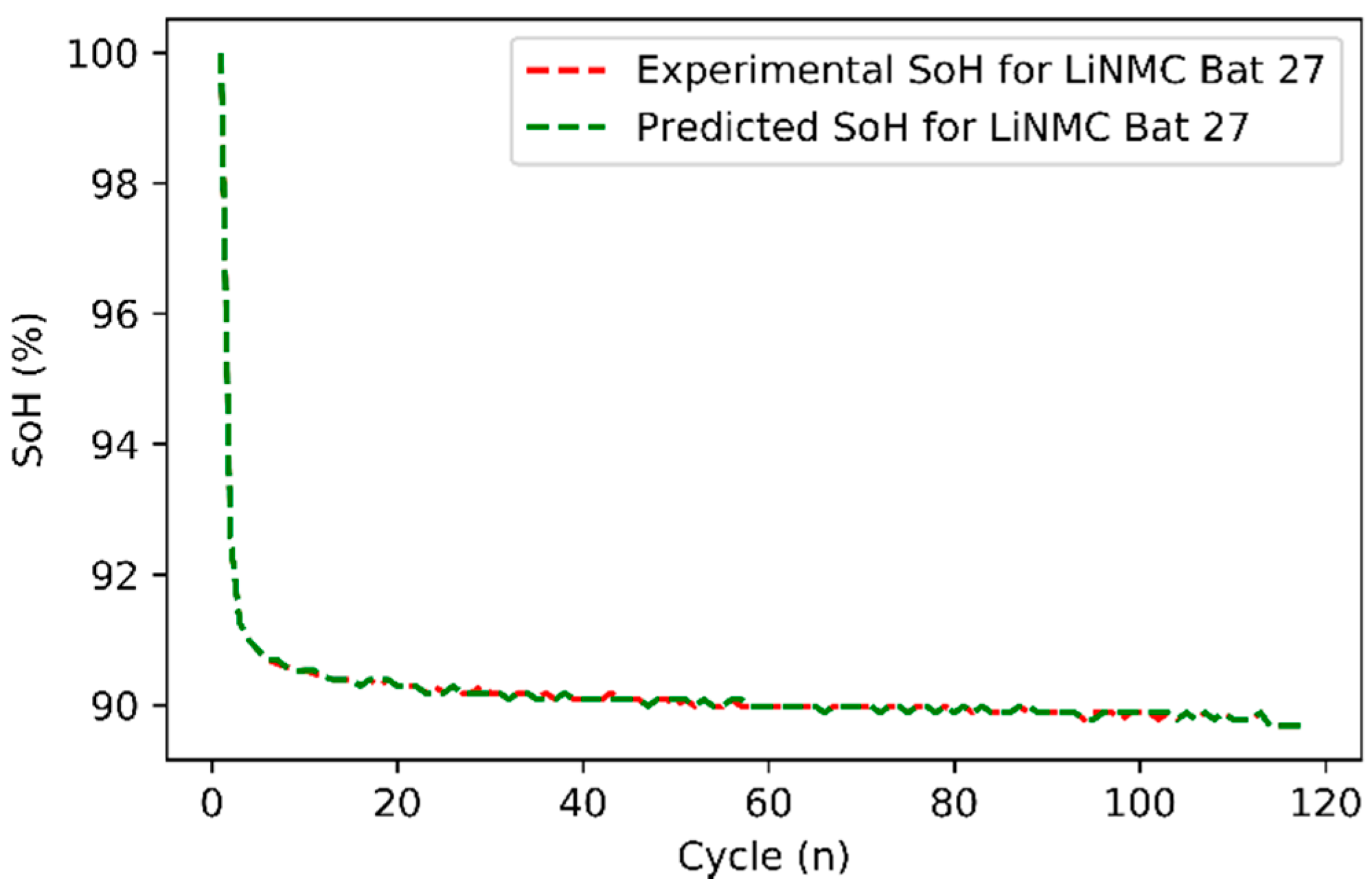
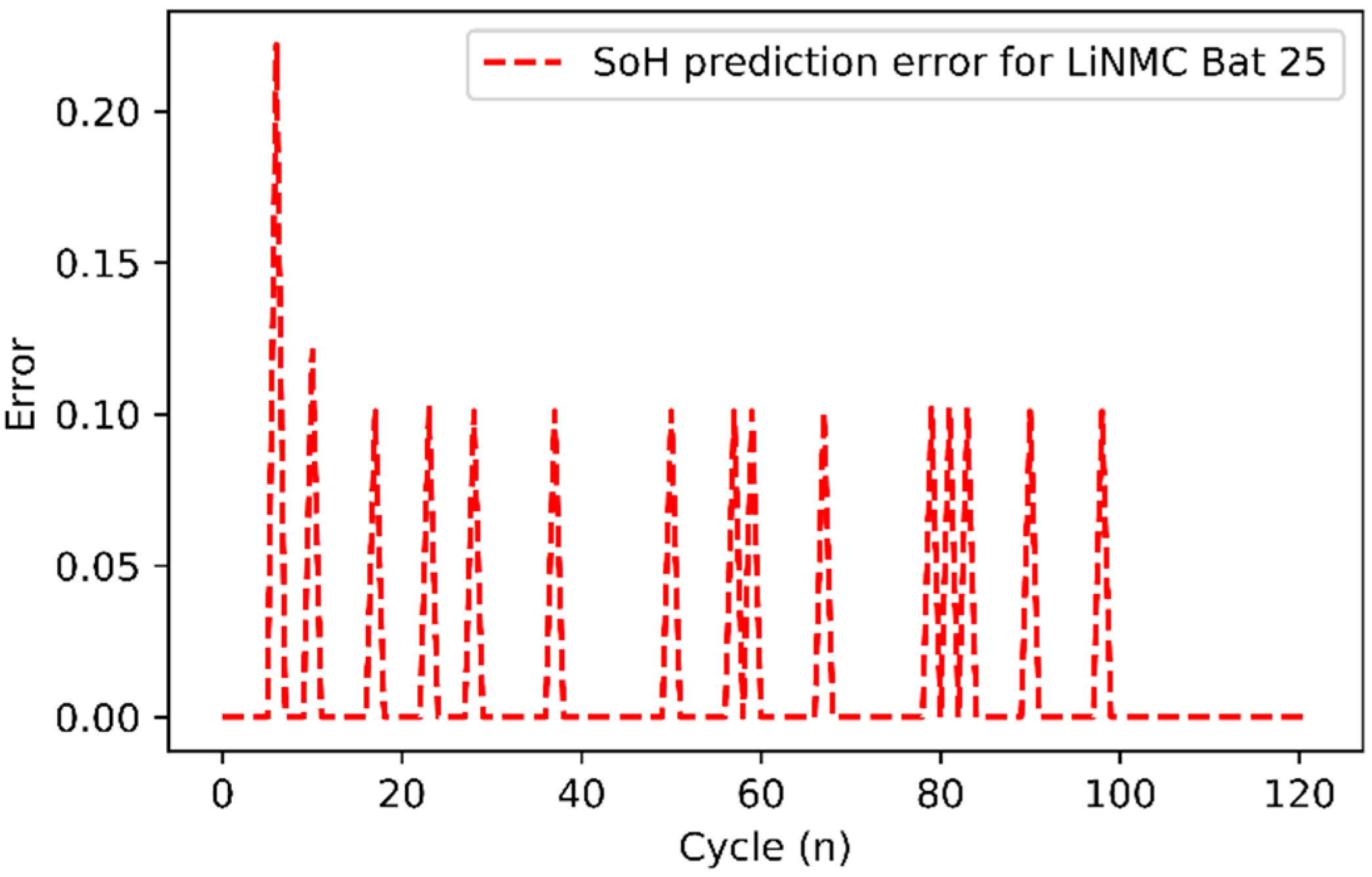
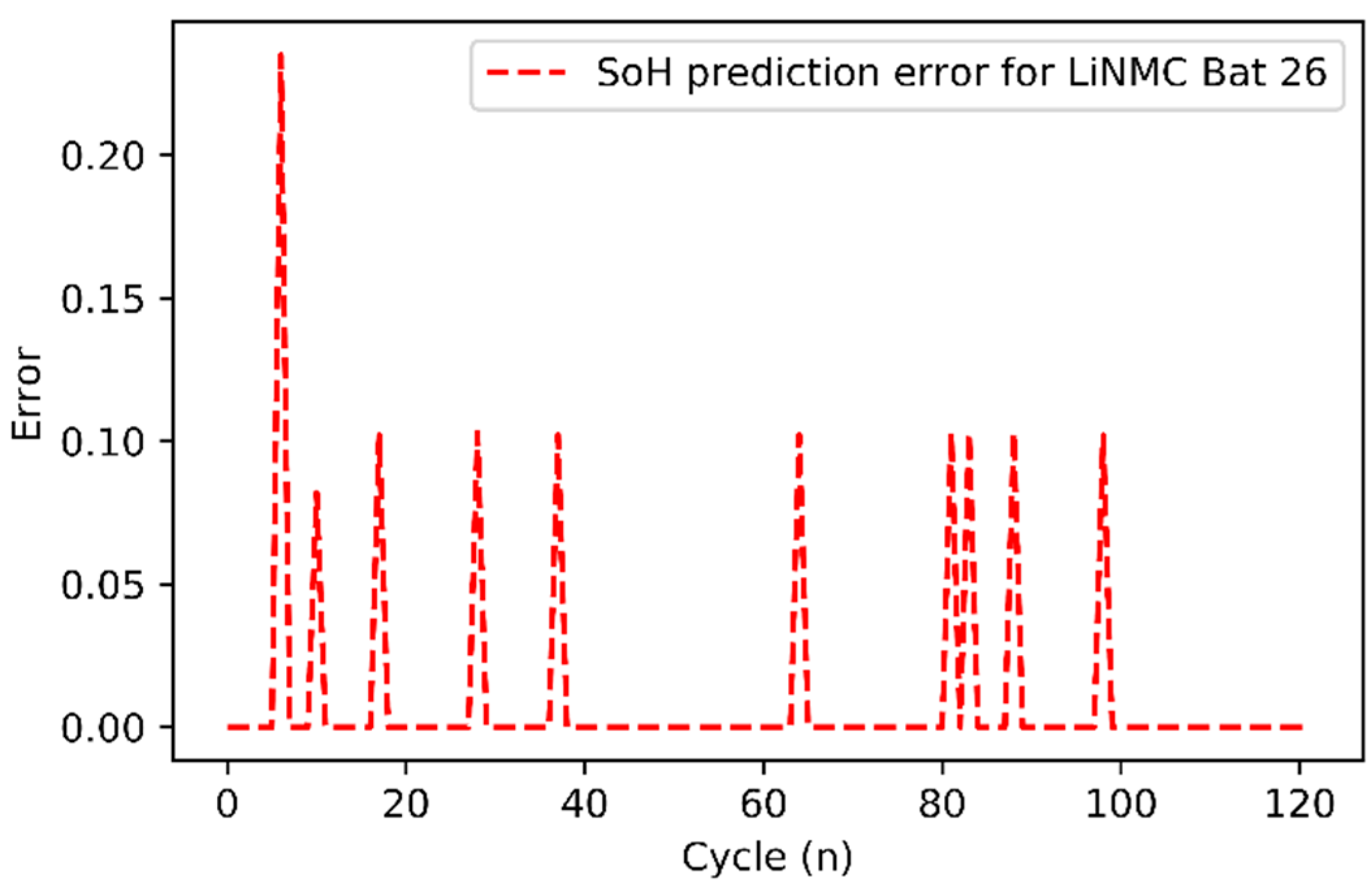
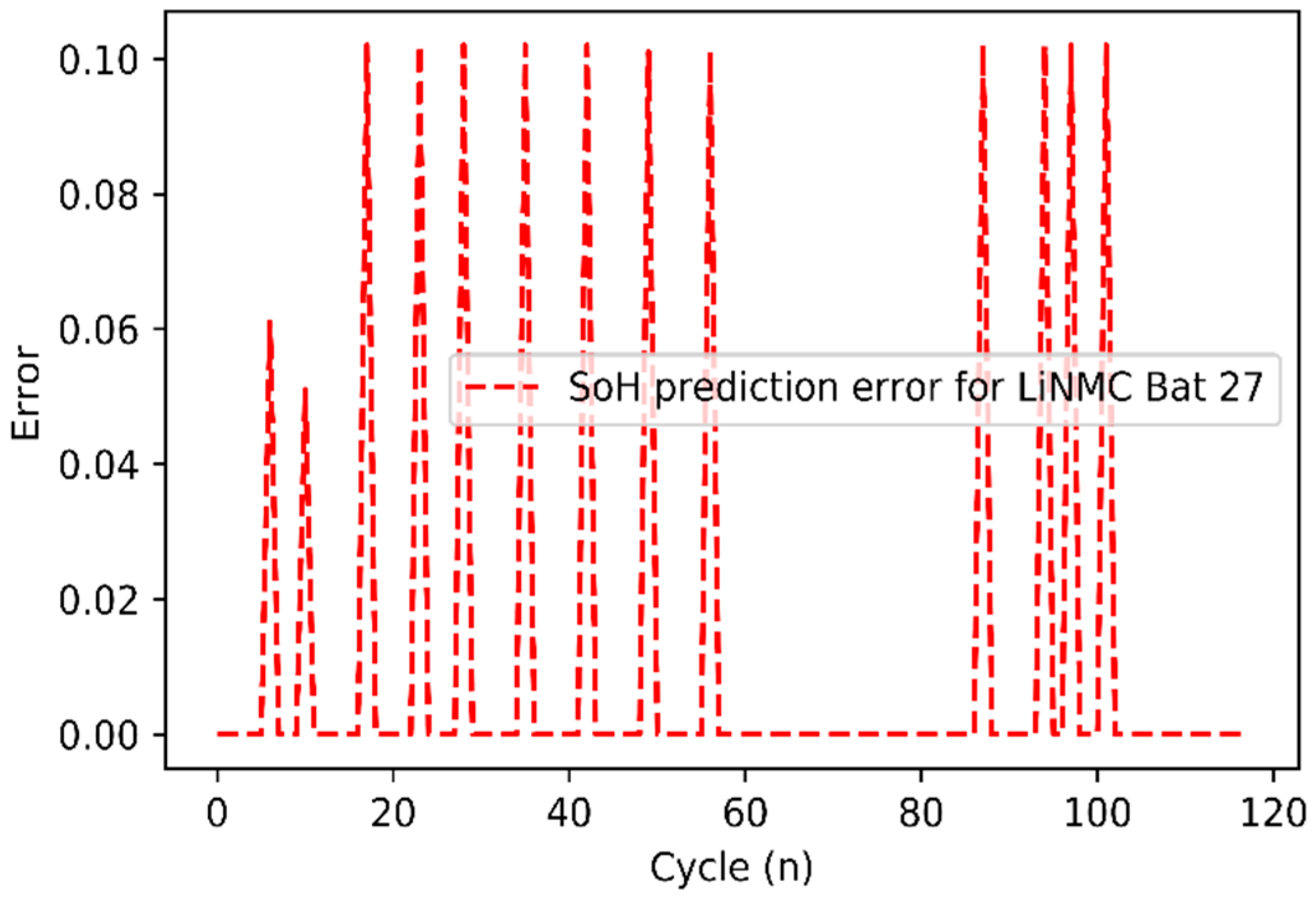
3.3. Results Related to SoH
Error Estimation Results
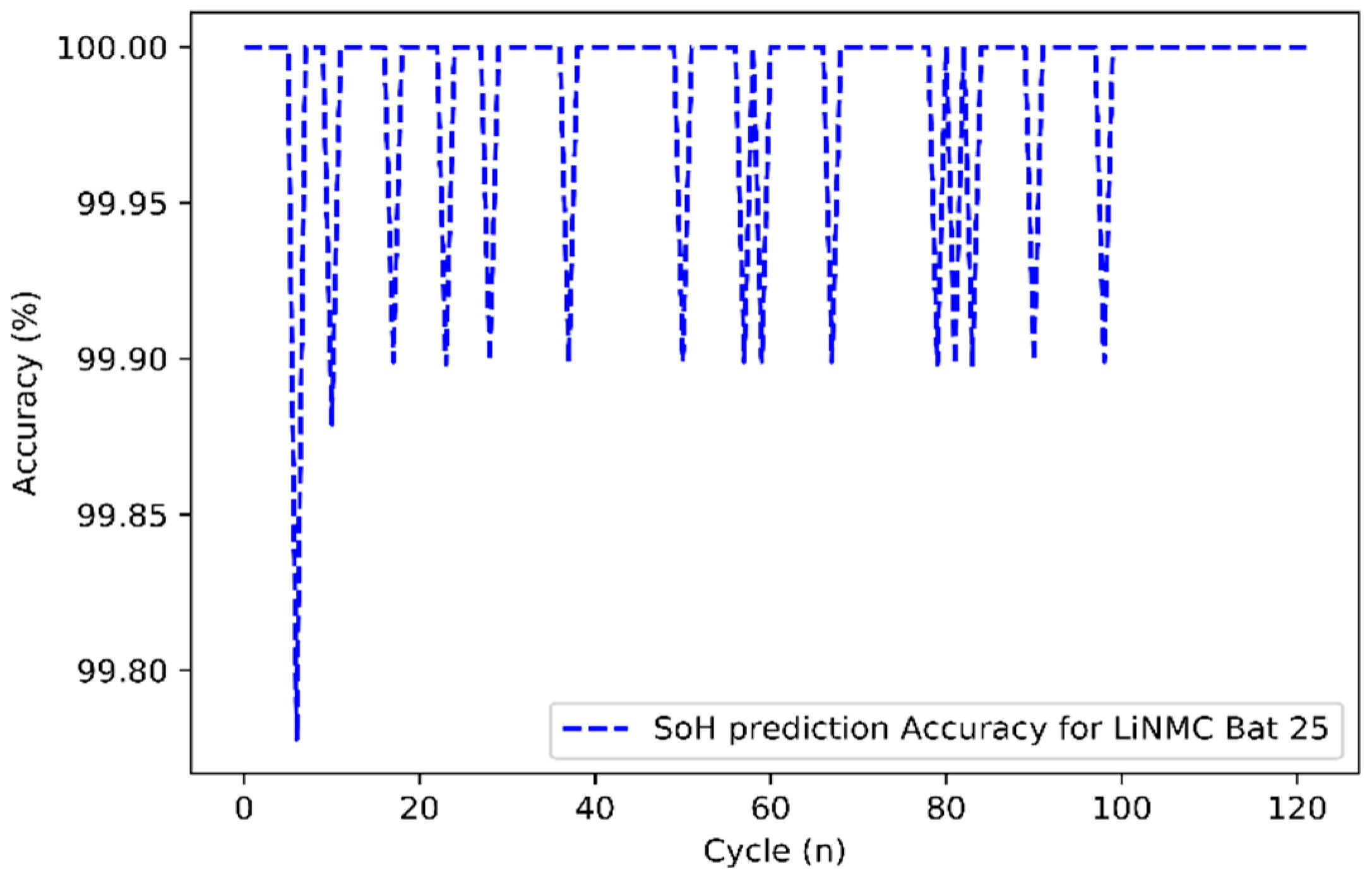
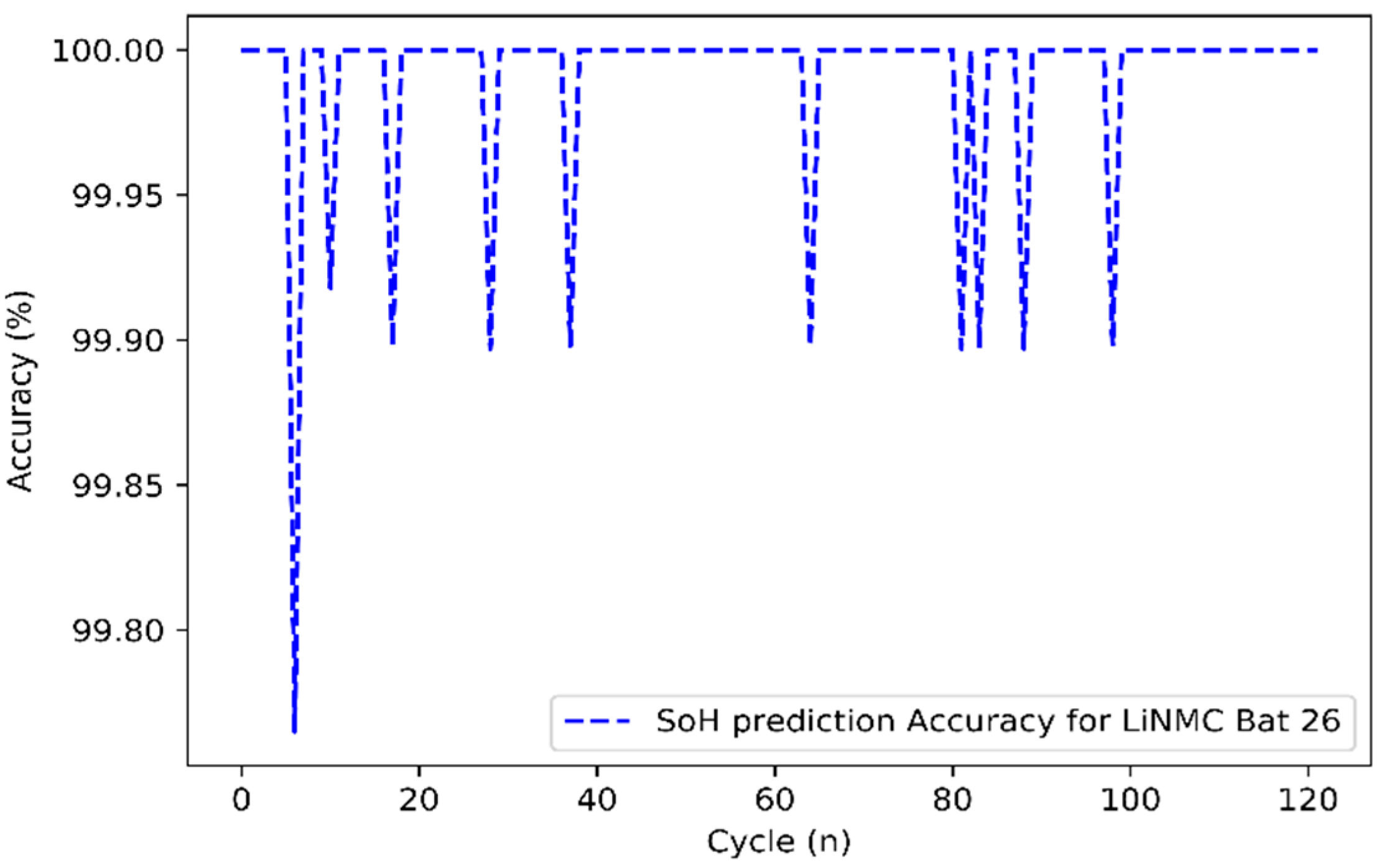
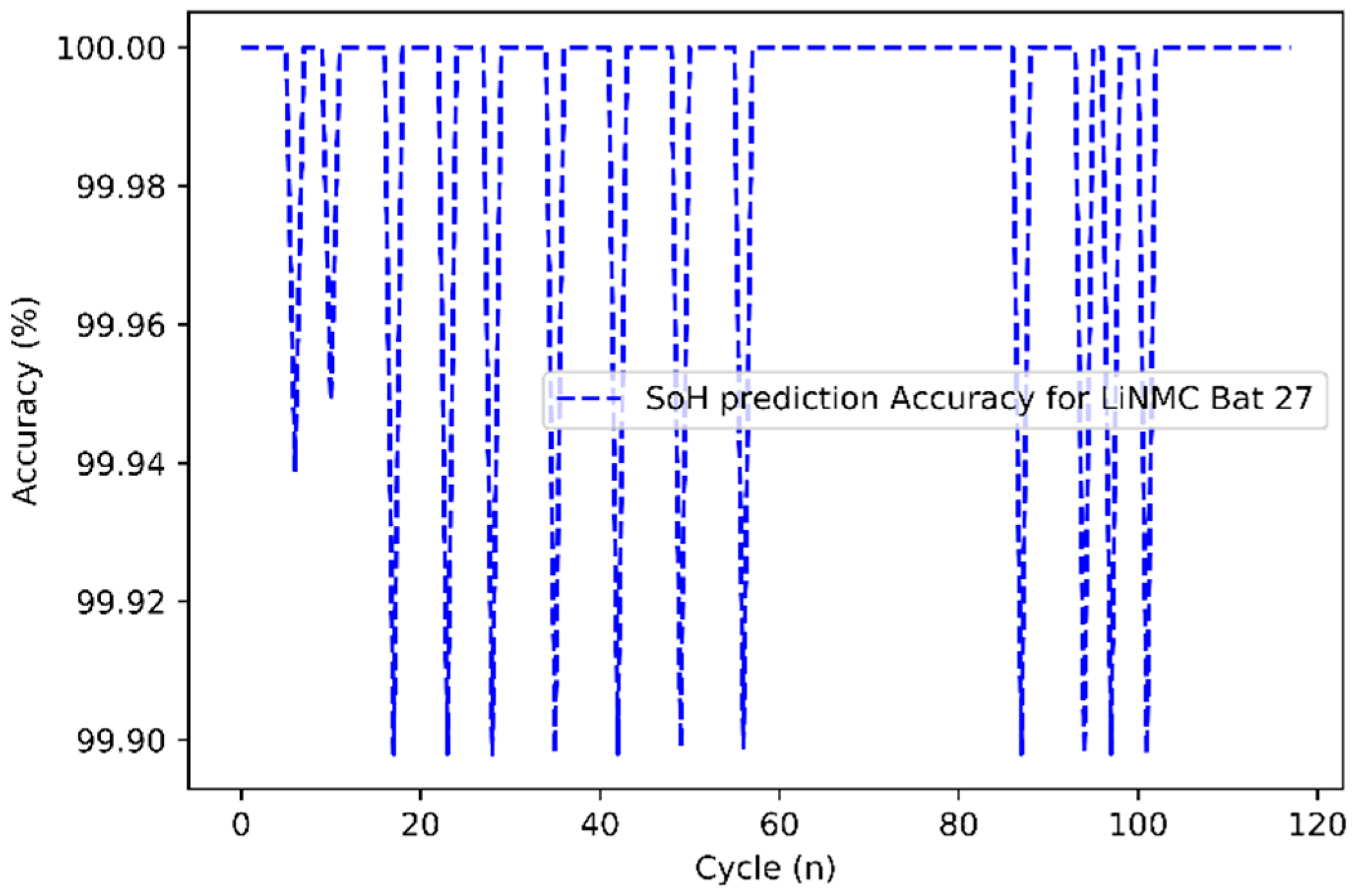
3.4. Accuracy Results
4. Conclusions and Future Work
- An accurate SOH prediction model was successfully demonstrated.
- The ML-based battery model was accurate and error-free.
- The created model had the same quality of data; it can be substituted for the costly experimental process. It can act as an intelligent monitoring system for vehicle battery health. The above discussion and graphical representation conclude that the ML-based battery model to predict SOH from capacitive data was successful, and it was an accurate model. This work is a novel specimen in predicting battery SOH.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| I | Current |
| U | Voltage |
| Q | Battery capacity |
| Qnom | Nominal capacity |
| Qact | Actual capacity |
| LIB | Lithium-ion battery |
| SOC | State of charge |
| SOH | State of health |
| BMS | Battery management system |
| EV | Electric vehicles |
| RC | Resistance-capacitance |
| C-rate | Charge- and discharge rate |
| OCV | Open circuit voltage |
| CC-CV | Constant current-constant voltage |
| ECM | Equivalent circuit mode |
| EM | Electrochemical model |
| IR | Internal resistance |
| J | Cost or error function |
| m | Size of the data set |
| θ | Vector containing model parameter |
| y | Denotes the cycle number |
| x1 and x2 | Vectors representing |
| ANN | Artificial neural networks |
| n | Positive integer |
| Uoc (SOC) | Internal voltage of battery |
| Up1 and Up2 | Voltage across RC parallel |
References
- Sulaiman, N.; Hannan, M.A.; Mohamed, A.; Majlan, E.H.; Wan Daud, W.R. A Review on Energy Management System for Fuel Cell Hybrid Electric Vehicle: Issues and Challenges. Renew. Sustain. Energy Rev. 2015, 52, 802–814. [Google Scholar] [CrossRef]
- Abdul-Manan, A.F.N. Uncertainty and Differences in GHG Emissions between Electric and Conventional Gasoline Vehicles with Implications for Transport Policy Making. Energy Policy 2015, 87, 1–7. [Google Scholar] [CrossRef]
- Rahimi-Eichi, H.; Ojha, U.; Baronti, F.; Chow, M.Y. Battery Management System: An Overview of Its Application in the Smart Grid and Electric Vehicles. IEEE Ind. Electron. Mag. 2013, 7, 4–16. [Google Scholar] [CrossRef]
- Xu, J.; Cao, B.; Chen, Z.; Zou, Z. An Online State of Charge Estimation Method with Reduced Prior Battery Testing Information. Int. J. Electr. Power Energy Syst. 2014, 63, 178–184. [Google Scholar] [CrossRef]
- Farmann, A.; Waag, W.; Marongiu, A.; Sauer, D.U. Critical Review of On-Board Capacity Estimation Techniques for Lithium-Ion Batteries in Electric and Hybrid Electric Vehicles. J. Power Sources 2015, 281, 114–130. [Google Scholar] [CrossRef]
- Rong, P.; Pedram, M. An Analytical Model for Predicting the Remaining Battery Capacity of Lithium-Ion Batteries. In Proceedings of the Proceedings-Design, Automation and Test in Europe, DATE, Brussels, Belgium, 19 February 2003; pp. 1148–1149. [Google Scholar]
- Bhangu, B.S.; Bentley, P.; Stone, D.A.; Bingham, C.M. Nonlinear Observers for Predicting State-of-Charge and State-of-Health of Lead-Acid Batteries for Hybrid-Electric Vehicles. IEEE Trans. Veh. Technol. 2005, 54, 783–794. [Google Scholar] [CrossRef] [Green Version]
- Herrmann, F.; Rothfuss, F. Introduction to Hybrid Electric Vehicles, Battery Electric Vehicles, and off-Road Electric Vehicles. In Advances in Battery Technologies for Electric Vehicles; Elsevier: Amsterdam, The Netherlands, 2015; pp. 3–16. ISBN 9781782423980. [Google Scholar]
- Shareef, H.; Islam, M.M.; Mohamed, A. A Review of the Stage-of-the-Art Charging Technologies, Placement Methodologies, and Impacts of Electric Vehicles. Renew. Sustain. Energy Rev. 2016, 64, 403–420. [Google Scholar] [CrossRef]
- Han, X.; Ouyang, M.; Lu, L.; Li, J. A Comparative Study of Commercial Lithium Ion Battery Cycle Life in Electric Vehicle: Capacity Loss Estimation. J. Power Sources 2014, 268, 658–669. [Google Scholar] [CrossRef]
- Doughty, D.; Roth, E.P. A General Discussion of Li Ion Battery Safety. Electrochem. Soc. Interface 2012, 21, 37–44. [Google Scholar] [CrossRef] [Green Version]
- Lajunen, A.; Suomela, J. Evaluation of Energy Storage System Requirements for Hybrid Mining Loaders. IEEE Trans. Veh. Technol. 2012, 61, 3387–3393. [Google Scholar] [CrossRef]
- Stiaszny, B.; Ziegler, J.C.; Krauß, E.E.; Schmidt, J.P.; Ivers-Tiffée, E. Electrochemical Characterization and Post-Mortem Analysis of Aged LiMn2O4-Li(Ni0.5Mn0.3Co0.2)O2/Graphite Lithium Ion Batteries. Part I: Cycle Aging. J. Power Sources 2014, 251, 439–450. [Google Scholar] [CrossRef]
- Barré, A.; Deguilhem, B.; Grolleau, S.; Gérard, M.; Suard, F.; Riu, D. A Review on Lithium-Ion Battery Ageing Mechanisms and Estimations for Automotive Applications. J. Power Sources 2013, 241, 680–689. [Google Scholar] [CrossRef] [Green Version]
- Ng, K.S.; Moo, C.S.; Chen, Y.P.; Hsieh, Y.C. Enhanced Coulomb Counting Method for Estimating State-of-Charge and State-of-Health of Lithium-Ion Batteries. Appl. Energy 2009, 86, 1506–1511. [Google Scholar] [CrossRef]
- Alvarez Anton, J.C.; Garcia Nieto, P.J.; Blanco Viejo, C.; Vilan Vilan, J.A. Support Vector Machines Used to Estimate the Battery State of Charge. IEEE Trans. Power Electron. 2013, 28, 5919–5926. [Google Scholar] [CrossRef]
- Huang, S.C.; Tseng, K.H.; Liang, J.W.; Chang, C.L.; Pecht, M.G. An Online SOC and SOH Estimation Model for Lithium-Ion Batteries. Energies 2017, 10, 512. [Google Scholar] [CrossRef]
- Lee, H.; Park, J.; Kim, J. Incremental Capacity Curve Peak Points-Based Regression Analysis for the State-of-Health Prediction of a Retired LiNiCoAlO2 Series/Parallel Configured Battery Pack. Electronics 2019, 8, 1118. [Google Scholar] [CrossRef] [Green Version]
- Liu, Z.; Zhao, J.; Wang, H.; Yang, C. A New Lithium-Ion Battery SOH Estimation Method Based on an Indirect Enhanced Health Indicator and Support Vector Regression in PHMs. Energies 2020, 13, 830. [Google Scholar] [CrossRef] [Green Version]
- Ma, C.; Zhai, X.; Wang, Z.; Tian, M.; Yu, Q.; Liu, L.; Liu, H.; Wang, H.; Yang, X. State of Health Prediction for Lithium-Ion Batteries Using Multiple-View Feature Fusion and Support Vector Regression Ensemble. Int. J. Mach. Learn. Cybern. 2019, 10, 2269–2282. [Google Scholar] [CrossRef]
- Dai, H.; Zhao, G.; Lin, M.; Wu, J.; Zheng, G. A Novel Estimation Method for the State of Health of Lithium-Ion Battery Using Prior Knowledge-Based Neural Network and Markov Chain. IEEE Trans. Ind. Electron. 2019, 66, 7706–7716. [Google Scholar] [CrossRef]
- Pan, H.; Lü, Z.; Wang, H.; Wei, H.; Chen, L. Novel Battery State-of-Health Online Estimation Method Using Multiple Health Indicators and an Extreme Learning Machine. Energy 2018, 160, 466–477. [Google Scholar] [CrossRef]
- Wu, J.; Wang, Y.; Zhang, X.; Chen, Z. A Novel State of Health Estimation Method of Li-Ion Battery Using Group Method of Data Handling. J. Power Sources 2016, 327, 457–464. [Google Scholar] [CrossRef]
- Khumprom, P.; Yodo, N. A Data-Driven Predictive Prognostic Model for Lithium-Ion Batteries Based on a Deep Learning Algorithm. Energies 2019, 12, 660. [Google Scholar] [CrossRef] [Green Version]
- Xu, H.; Peng, Y.; Su, L. Health State Estimation Method of Lithium Ion Battery Based on NASA Experimental Data Set. IOP Conf. Ser. Mater. Sci. Eng. 2018, 452, 032067. [Google Scholar] [CrossRef]
- Chen, Z.; Sun, M.; Shu, X.; Shen, J.; Xiao, R. On-Board State of Health Estimation for Lithium-Ion Batteries Based on Random Forest. Proc. IEEE Int. Conf. Ind. Technol. 2018, 1754–1759. [Google Scholar] [CrossRef]
- Proakis, J.G.; Manolakis, D.G. Digital Signal Processing: Principles, Algorithms, and Applications. 1996. Available online: https://www.amazon.com/Digital-Signal-Processing-Principles-Applications/dp/002396815X (accessed on 5 February 2022).















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method #Variants | Ref. | Battery Chemistry | Training Data Size | Estimation | Error |
|---|---|---|---|---|---|
| LR | Huang et al. [17] | 1.1 Ah LCO | 1/4 cells | Multiple | <2.6% RMSE |
| LR | Lee et al. [18] | 2.0 Ah NCA | 1/12 cells | Multiple | <1% AE |
| SVM | Liu et al. [19] | 2 Ah NMC | 120/168 cycles | Single | 0.24% RMSE |
| LS-SVM | Deng et al. [20] | 10 Ah LFP | 75% cycles | Single | 0.6% RMSE |
| ANN #FFNN | Dai et al. [21] | LFP | 135/168 Cycles | Single | <1.7% MaxE |
| ANN #ELM | Pan et al. [22] | NMC | All cycles | Multiple | 2.22% MaxE |
| DL #DNN | Wu et al. [23] | LFP | 60% cycles | Single | <5% MAE |
| DL #DNN | Khumprom et al. [24] | NMC | All cycles | Multiple | 3.43% RMSE |
| EL #RF | Xu et al. [25] | NMC | 75% cycles | Multiple | 2% RMSE |
| EL #RF | Chen et al. [26] | NMC | All cycles | Multiple | 2% MaxARE |
| Battery Data | Current (A) | Voltage (V) | Charge Capacity (Ah) | Discharge Capacity (Ah) | Cycles |
|---|---|---|---|---|---|
| CH data 25 | 1.1002 | 2.5133 | 0.98862 | 1.9706 | 122 |
| CH data 26 | 1.0999 | 2.5047 | 0.97738 | 1.9557 | 122 |
| CH data 27 | 1.1003 | 2.5131 | 0.9819 | 1.5356 | 118 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Akbar, K.; Zou, Y.; Awais, Q.; Baig, M.J.A.; Jamil, M. A Machine Learning-Based Robust State of Health (SOH) Prediction Model for Electric Vehicle Batteries. Electronics 2022, 11, 1216. https://doi.org/10.3390/electronics11081216
Akbar K, Zou Y, Awais Q, Baig MJA, Jamil M. A Machine Learning-Based Robust State of Health (SOH) Prediction Model for Electric Vehicle Batteries. Electronics. 2022; 11(8):1216. https://doi.org/10.3390/electronics11081216
Chicago/Turabian StyleAkbar, Khalid, Yuan Zou, Qasim Awais, Mirza Jabbar Aziz Baig, and Mohsin Jamil. 2022. "A Machine Learning-Based Robust State of Health (SOH) Prediction Model for Electric Vehicle Batteries" Electronics 11, no. 8: 1216. https://doi.org/10.3390/electronics11081216