
Safety System Assessment Case Study of Automated Vehicle Shuttle


Abstract
:1. Introduction
- TOPSIS is simple to implement;
- TOPSIS provide robust solutions, it tends to provide a positive ideal solution, but avoid a negative ideal solution; and
- TOPSIS has been utilized with success in the study of intelligent vehicle systems.
2. Background of Key Automotive Standards
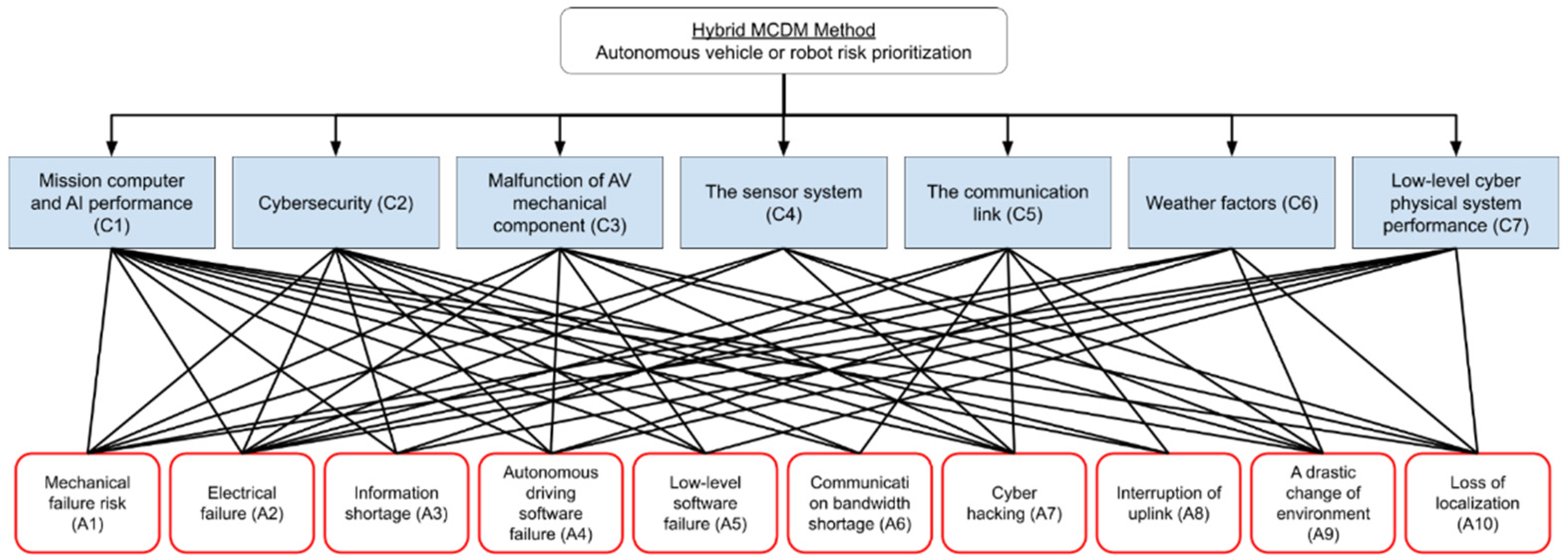
3. Risk Evaluation Model Development
- Formulation of criteria and risks [34];
- Prioritization of criteria (fuzzy AHP);
- Prioritization of risks (fuzzy TOPSIS).
3.1. Criteria Prioritization Using Fuzzy AHP
3.2. Risk Prioritization Using Fuzzy TOPSIS
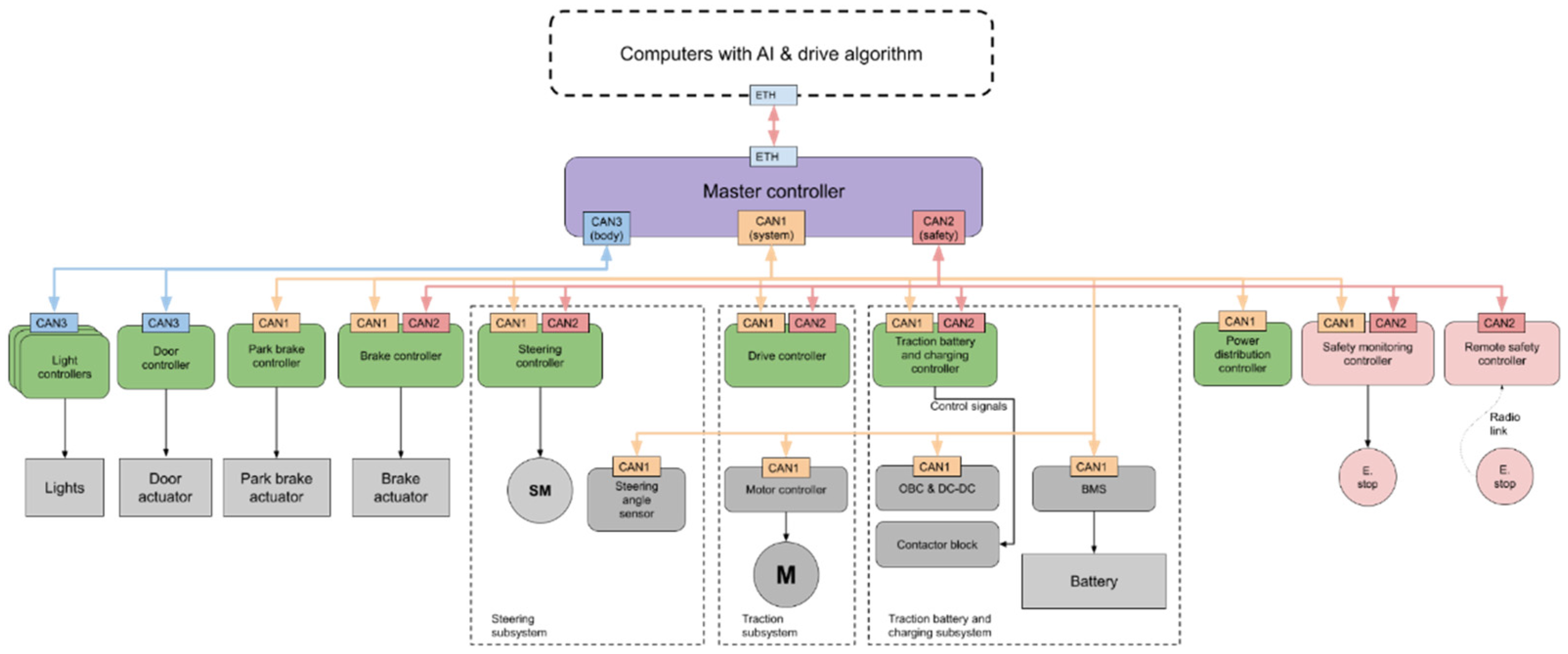
4. Low-Level Communication and Safety Architecture for the AV Shuttle Based on the Risk Evaluation Model
- CAN 1 for all system controllers;
- CAN 2 for safety-related controllers and for duplicating critical system messages; and
- CAN 3 for vehicle body-related and other low-priority controllers.
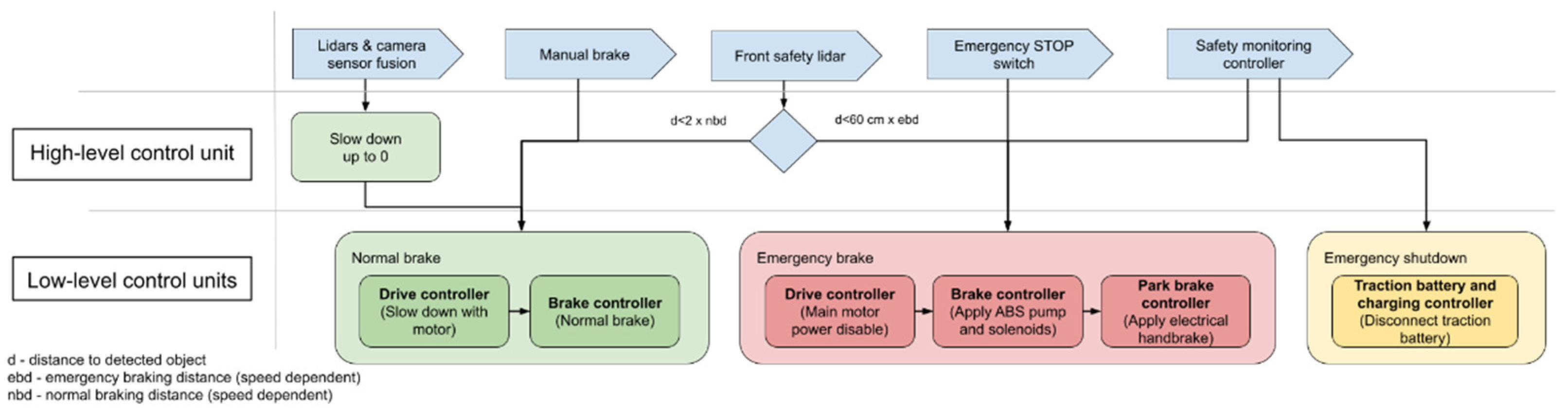
- Normal braking is usually triggered by a high-level computer or safety lidar. When there is free room regenerative braking can be used, followed by normal braking if needed;
- The emergency brake is triggered when the emergency STOP switch is pressed, the front safety lidar sees something that is too close, or when the safety monitoring controller is triggered by some fatal error;
- An emergency shutdown may be followed by emergency braking when the emergency STOP switch is pressed (for example, a risk of fire because there is smoke in the cabin), the crash detection system is triggered, or some serious error is detected. Emergency shutdown disables the high-voltage traction battery.
5. Conclusions
- An MCDM risk evaluation model was developed for safety system assessment;
- A list of prioritized risks was developed, as presented in Table 9;
- The most critical risks were determined to be cyber hacking, low-level software failure, and electrical failure.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Della Cava, M. Tesla Announces Fully Self-Driving Cars. USA Today, 2016. Available online: https://eu.usatoday.com/story/tech/news/2016/10/19/tesla-announces-fully-self-driving-fleet/92430638/ (accessed on 13 March 2022).
- Korosec, K. Ford Postpones Autonomous Vehicle Service until 2022. TechCrunch, 28 April 2020. Available online: https://techcrunch.com/2020/04/28/ford-postpones-autonomous-vehicle-service-until-2022/?guccounter=1&guce_referrer=aHR0cHM6Ly93d3cuZ29vZ2xlLmNvbS8&guce_referrer_sig=AQAAADBFTUMYSsgWbXuqaxjPCxHsMVa-3xDxahKGV33qvhPjg0sPUdDXuypt_zViyxxg-nZe8HSlMZWfgvGWu9ch1uB0Sa4fnxRslcxGyh5xfICKKji9dPOz4JLHXH9U-QLnno5a3WN5YnJ9F9o4qt-7C76fa9ULO6mkuCGMXLNRns2x (accessed on 21 December 2021).
- Sell, R.; Rassolkin, A.; Wang, R.; Otto, T. Integration of Autonomous Vehicles and Industry 4.0. Proc. Eston. Acad. Sci. 2019, 68, 389. [Google Scholar] [CrossRef]
- Shuttleworth, J. SAE Standard News: J3016 Automated-Driving Graphic Update, 2019. Available online: https://www.sae.org/news/2019/01/sae-updates-j3016-automated-driving-graphic (accessed on 20 December 2021).
- Sell, R.; Leier, M.; Rassõlkin, A.; Ernits, J. Self-Driving Car ISEAUTO for Research and Education. In Proceedings of the 2018 19th International Conference on Research and Education in Mechatronics (REM), Delft, The Netherlands, 7–8 June 2018; pp. 111–116. [Google Scholar] [CrossRef]
- Rassõlkin, A.; Sell, R.; Leier, M. Development Case Study of the First Estonian Self-Driving Car, Iseauto. Electr. Control Commun. Eng. 2018, 14, 81–88. [Google Scholar] [CrossRef] [Green Version]
- Sell, R.; Coatanéa, E.; Christophe, F. Important Aspects of Early Design in Mechatronic. In Proceedings of the 6th International DAAAM Baltic Conference, Tallinn, Estonia, 24–26 April 2008. [Google Scholar]
- Sell, R.; Petritsenko, A. Early Design and Simulation Toolkit for Mobile Robot Platforms. Int. J. Prod. Dev. 2013, 18, 168. [Google Scholar] [CrossRef]
- Mahmood, K.; Karjust, K.; Raamets, T. Production Intralogistics Automation Based on 3D Simulation Analysis. J. Mach. Eng. 2021, 21, 101–115. [Google Scholar] [CrossRef]
- Pikner, H.; Karjust, K. Multi-Layer Cyber-Physical Low-Level Control Solution for Mobile Robots. IOP Conf. Ser. Mater. Sci. Eng. 2021, 1140, 012048. [Google Scholar] [CrossRef]
- Ziyan, C.; Shiguo, L. China’s Self-Driving Car Legislation Study. Comput. Law Secur. Rev. 2021, 41, 105555. [Google Scholar] [CrossRef]
- Safety First for Automated Driving. Available online: https://newsroom.intel.com/wp-content/uploads/sites/11/2019/07/Intel-Safety-First-for-Automated-Driving.pdf (accessed on 24 December 2021).
- Yue, H.; Medromi, H.; Ding, H.; Bassir, D. A novel hybrid drone for multi-propose aerial transportation and its conceptual optimization based on surrogate approach. J. Phys. Conf. Ser. 2021, 1972, 12103. [Google Scholar] [CrossRef]
- Guessasma, S.; Bassir, D. Neural network computation for the evaluation of process rendering: Application to thermally sprayed coatings. Int. J. Simul. Multisci. Des. Optim. 2017, 8, A1. [Google Scholar] [CrossRef] [Green Version]
- Tang, X.G.; Rezoug, M.; Hamzaoui, R.; Bassir, D.; El Meouche, R.; Hreim, J.F.; Feng, Z.Q. Multiobjective optimization on urban flooding using RSM and GA. Adv. Mater. Res. Adv. Civ. Eng. 2011, 255–260, 1627–1631. [Google Scholar] [CrossRef]
- Guessasma, S.; Bassir, D. Comparing heuristic and deterministic approaches to optimize mechanical parameters of biopolymer composite materials. Mech. Adv. Mater. Struct. 2009, 16, 293–299. [Google Scholar] [CrossRef]
- Herranen, H.; Majak, J.; Tsukrejev, P.; Karjust, K.; Märtens, O. Design and Manufacturing of composite laminates with structural health monitoring capabilities. Procedia CIRP 2018, 72, 647–652. [Google Scholar] [CrossRef]
- Lasn, K.; Klauson, A.; Chati, F.; Décultot, D. Experimental determination of elastic constants of an orthotropic composite plate by using Lamb waves. Mech. Compos. Mater. 2011, 47, 435–446. [Google Scholar] [CrossRef]
- Lasn, K.; Klauson, A. Non-destructive identification of elastic constants by vibration measurements and optimization. In Proceedings of the OAS 2011: International Conference on Optimization and Analysis of Structures, Tartu, Estonia, 25–27 August 2011. [Google Scholar]
- Lasn, K.; Echtermeyer, A.T.; Klauson, A.; Chati, F.; Décultot, D. Comparison of laminate stiffness as measured by three experimental methods. Polym. Test. 2015, 44, 143–152. [Google Scholar] [CrossRef]
- Frolovs, G.; Rocens, K.; Sliseris, J. Optimal design of plates with cell type hollow core. IOP Conf. Ser. Mater. Sci. Eng. 2017, 251, 12075. [Google Scholar] [CrossRef]
- Sliseris, J.; Buka-Vaivade, K. Numerical Modelling of High Strength Fibre-Concrete’s columns in Multi-Storey Building. IOP Conf. Ser. Mater. Sci. Eng. 2019, 660, 012062. [Google Scholar] [CrossRef]
- Vinodh, S.; Prasanna, M.; Hari Prakash, N. Integrated Fuzzy AHP-TOPSIS for selecting the best plastic recycling method: A case study. Appl. Math. Model. 2014, 38, 4662–4672. [Google Scholar] [CrossRef]
- Bakioglu, G.; Atahan, A.O. AHP integrated TOPSIS and VIKOR methods with Pythagorean fuzzy sets to prioritize risks in self-driving vehicles. Appl. Soft Comput. 2020, 99, 106948. [Google Scholar] [CrossRef]
- Harrison, M.; Yang, Z.; Nguyen, T.T.; Kavakeb, S.; Wang, J.; Bonsall, S. A TOPSIS method for vehicle route selection in seaports—A real case analysis of a container terminal in North West Europe. In Proceedings of the 2015 International Conference on Transportation Information and Safety (ICTIS), Wuhan, China, 25–28 June 2015; pp. 599–606. [Google Scholar] [CrossRef]
- Pachêco Gomes, I.; Renan Bruno, D.; Santos Osório, F.; Fernando Wolf, D. Diagnostic Analysis for an Autonomous Truck Using Multiple Attribute Decision Making. In Proceedings of the 2018 Latin American Robotic Symposium, 2018 Brazilian Symposium on Robotics (SBR) and 2018 Workshop on Robotics in Education (WRE), Pessoa, Brazil, 6–10 November 2018; pp. 283–290. [Google Scholar] [CrossRef]
- Emovon, I.; Oghenenyerovwho, O.S. Application of MCDM method in material selection for optimal design: A review. Results Mater. 2020, 7, 100115. [Google Scholar] [CrossRef]
- Debouk, R. Overview of the 2nd Edition of ISO 26262: Functional Safety-Road Vehicles; General Motors Company: Warren, MI, USA, 2018. [Google Scholar] [CrossRef]
- ISO 26262; Road Vehicles—Functional Safety—Part 2: Management of Functional Safety. International Organization for Standardization: Geneva, Switzerland, 2018.
- IATF 16949; Quality Management System Requirements for Automotive Production and Relevant Service Parts Organisations. Automotive Industry Action Group: Southfield, MI, USA, 2016; ISBN 9781605343471.
- Automotive Electronics Council. Failure Mechanism Based Stress Test Qualification for Integrated Circuits; AEC Q100 Rev. H; Automotive Electronics Council: Luton, UK, 2014. [Google Scholar]
- Automotive Electronics Council. Stress Test Qualification for Passive Components; AEC Q200 Rev. D; Automotive Electronics Council: Luton, UK, 2010. [Google Scholar]
- SAE MOBILUS. Available online: https://saemobilus.sae.org/content/uscar2-7 (accessed on 12 November 2021).
- Karjust, K.; Majak, J.; Pikner, H.; Sell, R. Multi-Layer Cyber-Physical Control Method for Mobile Robot Safety Systems. Proc. Est. Acad. Sci. 2021, 70, 383. [Google Scholar] [CrossRef]
- Kaganski, S.; Majak, J.; Karjust, K. Fuzzy AHP as a Tool for Prioritization of Key Performance Indicators. Procedia CIRP 2018, 72, 1227–1232. [Google Scholar] [CrossRef]
- Paavel, M.; Karjust, K.; Majak, J. PLM Maturity Model Development and Implementation in SME. Procedia CIRP 2017, 63, 651–657. [Google Scholar] [CrossRef]
- Paavel, M.; Karjust, K.; Majak, J. Development of a Product Lifecycle Management Model Based on the Fuzzy Analytic Hierarchy Process. Proc. Est. Acad. Sci. 2017, 66, 279. [Google Scholar] [CrossRef]
- Davis, R.I.; Burns, A.; Bril, R.J.; Lukkien, J.J. Controller Area Network (CAN) Schedulability Analysis: Refuted, Revisited and Revised. Real Time Syst. 2007, 35, 239–272. [Google Scholar] [CrossRef] [Green Version]
- Lab, T.K.S. Experimental Security Research of Tesla Autopilot; Tencent Keen Security Lab: Shenzhen, China, 2019. [Google Scholar]
- SPC5 32-Bit Microcontroller Series Featuring Power Architecture, 2016. Available online: https://www.st.com/content/ccc/resource/sales_and_marketing/presentation/product_presentation/81/61/89/8b/77/1b/42/5f/SPC5_Family_Overview.pdf/files/SPC5_Family_Overview.pdf/jcr:content/translations/en.SPC5_Family_Overview.pdf (accessed on 25 December 2021).
- Giri, N.; Munir, A.; Kong, J. An Integrated Safe and Secure Approach for Authentication and Secret Key Establishment in Automotive Cyber-Physical Systems. In Intelligent Computing. SAI 2020; Advances in Intelligent Systems and Computing; Springer: Cham, Switzerland, 2020. [Google Scholar] [CrossRef]
- Poudel, B.; Munir, A. Design and Evaluation of a Reconfigurable ECU Architecture for Secure and Dependable Automotive CPS. IEEE Trans. Dependable Secur. Comput. 2021, 18, 235–252. [Google Scholar] [CrossRef] [Green Version]
- Gysen, L.; Ayeb, M.; Brabetz, L. Cable Bundle Protection and Cross-Section Reduction by Using a Centralized Smart Fusing Strategy. In Proceedings of the 2018 IEEE International Conference on Electrical Systems for Aircraft, Railway, Ship Propulsion and Road Vehicles International Transportation Electrification Conference (ESARS-ITEC), Nottingham, UK, 7–9 November 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Wang, Z.; Yu, L.; You, C.; Wang, Y.; Song, J. Fail-Safe Control Allocation for a Distributed Brake-by-Wire System Considering the Driver’s Behaviour. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2014, 228, 1547–1567. [Google Scholar] [CrossRef]
- Liu, H.; Deng, W.; He, R.; Qian, L.; Yang, S.; Wu, J. Power Assisted Braking Control Based on a Novel Mechatronic Booster. SAE Int. J. Passeng. Cars Mech. Syst. 2016, 9, 885–891. [Google Scholar] [CrossRef]
- Hasan, N.N.; Arif, A.; Hassam, M.; Ul Husnain, S.S.; Pervez, U. Implementation of Tire Pressure Monitoring System with Wireless Communication. In Proceedings of the 2011 International Conference on Communications, Computing and Control Applications (CCCA), Hammamet, Tunisia, 3–5 March 2011; pp. 1–4. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
| The Relative Importance in Terms of Linguistic Variables | Crisp AHP Scale | Fuzzy Triangular | Reciprocal Fuzzy |
|---|---|---|---|
| Equally Preferred (EqP) | 1 | 1, 1, 1 | 1, 1, 1 |
| Equally to Moderately Preferred (Eq-MP) | 2 | 1, 2, 3 | 1/3, 1/2, 1 |
| Moderately Preferred (MP) | 3 | 2, 3, 4 | 1/4, 1/3,1/2 |
| Moderately to Strongly Preferred (M-SP) | 4 | 3, 4, 5 | 1/5, 1/4, 1/3 |
| Strongly Preferred (SP) | 5 | 4, 5, 6 | 1/6, 1/5, 1/4 |
| Strongly to Very Strongly Preferred (S-VSP) | 6 | 5, 6, 7 | 1/7, 1/6, 1/5 |
| Very Strongly Preferred (VSP) | 7 | 6, 7, 8 | 1/8, 1/7, 1/6 |
| Very Strongly to Extremely Preferred (VS-ExP) | 8 | 7, 8, 9 | 1/9, 1/8, 1/7 |
| Extremely Preferred (ExP) | 9 | 8, 9, 9 | 1/9, 1/9, 1/8 |
| C1 | C2 | C3 | C4 | C5 | C6 | C7 | |
|---|---|---|---|---|---|---|---|
| Mission (C1) | EqP | ||||||
| Cybersecurity (C2) | Eq-MP | EqP | |||||
| Malfunction of AV mech. component (C3) | EqP | Eq-MP | EqP | ||||
| Sensor system (C4) | S-VSP | MP | EqP | EqP | |||
| Communication link Reliability (C5) | 1/MP | 1/MP | 1/M-SP | 1/MP | EqP | ||
| Weather factors (C6) | EqP | 1/MP | 1/SP | 1/M-SP | MP | EqP | |
| Low-level cyber-physical system (C7) | EqP | MP | EqP-MP | EqP | S-VSP | SP | EqP |
| C1 | C2 | C3 | C4 | C5 | C6 | C7 | |
|---|---|---|---|---|---|---|---|
| C1 | (1.00; 1.00; 1.00) | (0.34; 0.43; 0.60) | (0.33; 0.38; 0.47) | (0.15; 0.18; 0.23) | (1.20; 1.77; 2.33) | (1.00; 1.00; 1.00) | (0.46; 0.53; 0.63) |
| C2 | (1.67; 2.33; 2.94) | (1.00; 1.00; 1.00) | (0.44; 0.54; 0.73) | (0.37; 0.45; 0.59) | (1.78; 2.47; 3.24) | (2.14; 2.61; 3.03) | (0.35; 0.44; 0.63) |
| C3 | (2.14; 2.61; 3.03) | (1.36; 1.85; 2.29) | (1.00; 1.00; 1.00) | (0.31; 0.35; 0.42) | (1.35; 1.70; 2.12) | (2.00; 2.53; 3.24) | (0.34; 0.47; 0.71) |
| C4 | (4.44; 5.52; 6.46) | (1.70; 2.24; 2.70) | (2.40; 2.85; 3.20) | (1.00; 1.00; 1.00) | (1.76; 2.22; 2.74) | (2.29; 2.74; 3.14) | (0.93; 1.07; 1.26) |
| C5 | (0.43; 0.56; 0.83) | (0.31; 0.41; 0.56) | (0.47; 0.59; 0.74) | (0.37; 0.45; 0.57) | (1.00; 1.00; 1.00) | (0.37; 0.45; 0.59) | (0.37; 0.40; 0.43) |
| C6 | (1.00; 1.00; 1.00) | (0.33; 0.38; 0.47) | (0.31; 0.40; 0.50) | (0.32; 0.37; 0.44) | (1.70; 2.24; 2.70) | (1.00; 1.00; 1.00) | (0.30; 0.34; 0.40) |
| C7 | (1.59; 1.89; 2.18) | (1.59; 2.25; 2.85) | (1.40; 2.14; 2.93) | (0.79; 0.93; 1.07) | (2.31; 2.51; 2.71) | (2.49; 2.93; 3.32) | (1.00; 1.00; 1.00) |
| Aggregated Fuzzy Comp. Val. | Fuzzy Weights | Crisp Weights | Normalized Crisp Weights | Rank | |
|---|---|---|---|---|---|
| C1 | (0.51; 0.60; 0.71) | (0.05; 0.07; 0.11) | 0.079 | 0.076 | 6 |
| C2 | (0.86; 1.07; 1.34) | (0.09; 0.13; 0.20) | 0.142 | 0.137 | 4 |
| C3 | (0.98; 1.19; 1.46) | (0.10; 0.15; 0.22) | 0.157 | 0.151 | 3 |
| C4 | (1.83; 2.17; 2.50) | (0.19; 0.27; 0.37) | 0.280 | 0.268 | 1 |
| C5 | (0.44; 0.52; 0.65) | (0.05; 0.07; 0.10) | 0.070 | 0.067 | 7 |
| C6 | (0.56; 0.64; 0.73) | (0.06; 0.08; 0.11) | 0.083 | 0.079 | 5 |
| C7 | (1.49; 1.81; 2.09) | (0.16; 0.23; 0.31) | 0.232 | 0.223 | 2 |
| The Relative Importance of the Risks with Respect to Criteria in Terms of Linguistic Variables | Crisp AHP Scale | Fuzzy Triangular | Reciprocal Fuzzy |
|---|---|---|---|
| Very Weak (VW) | 1 | 1, 1, 1 | 1, 1, 1 |
| Very Weak to Weak (VW-W) | 2 | 1, 2, 3 | 1/3, 1/2, 1 |
| Weak (W) | 3 | 2, 3, 4 | 1/4, 1/3, 1/2 |
| Weak to Average (W-A) | 4 | 3, 4, 5 | 1/5, 1/4, 1/3 |
| Average (A) | 5 | 4, 5, 6 | 1/6, 1/5, 1/4 |
| Average to Strong (A-S) | 6 | 5, 6, 7 | 1/7, 1/6, 1/5 |
| Strong (S) | 7 | 6, 7, 8 | 1/8, 1/7, 1/6 |
| Strong to Very Strong (S-VS) | 8 | 7, 8, 9 | 1/9, 1/8, 1/7 |
| Very Strong (VS) | 9 | 8, 9, 9 | 1/9, 1/9, 1/8 |
| C1 | C2 | C3 | C4 | C5 | C6 | C7 | |
|---|---|---|---|---|---|---|---|
| A1 | VS | A | VS | S | S | S | S |
| A2 | VS | A | VS | VS | W | W | VS |
| A3 | VS | S | S | A | W | W | VS |
| A4 | VS | S | VS | W | W | W | S |
| A5 | VS | A | VS | S | S | W | VS |
| A6 | A | S | S | A | S | W | W |
| A7 | S | S | VS | A | S | W | S |
| A8 | A | S | A | A | S | W | W |
| A9 | S | W | VS | S | S | S | A |
| A10 | VS | S | VS | S | S | A | A |
| C1 | C2 | C3 | C4 | C5 | C6 | C7 | |
|---|---|---|---|---|---|---|---|
| A1 | (7.67; 8.67; 8.83) | (4.67; 5.67; 6.50) | (8.00; 9.00; 9.00) | (6.67; 7.67; 8.33) | (6.00; 7.00; 7.67) | (5.33; 6.33; 7.17) | (5.67; 6.67; 7.50) |
| A2 | (7.67; 8.67; 8.83) | (3.50; 4.33; 5.17) | (7.00; 8.00; 8.50) | (7.67; 8.67; 8.83) | (4.17; 5.00; 5.83) | (3.17; 4.00; 4.83) | (6.67; 7.67; 8.17) |
| A3 | (5.83; 6.67; 7.00) | (3.83; 4.67; 5.50) | (4.33; 5.33; 6.33) | (4.00; 5.00; 5.83) | (4.67; 5.67; 6.33) | (2.67; 3.67; 4.67) | (5.00; 6.00; 6.67) |
| A4 | (7.67; 8.67; 8.83) | (5.00; 6.00; 6.83) | (6.33; 7.33; 7.83) | (4.00; 5.00; 5.83) | (3.33; 4.33; 5.33) | (2.33; 3.17; 4.00) | (6.00; 7.00; 7.67) |
| A5 | (6.67; 7.67; 8.00) | (5.67; 6.67; 7.33) | (7.00; 8.00; 8.33) | (6.00; 7.00; 8.00) | (4.50; 5.33; 6.17) | (3.17; 4.17; 5.00) | (7.67; 8.67; 8.83) |
| A6 | (3.50; 4.33; 5.00) | (3.83; 4.50; 5.33) | (4.00; 5.00; 6.00) | (3.67; 4.67; 5.67) | (6.00; 7.00; 7.83) | (3.67; 4.67; 5.50) | (4.17; 5.17; 6.00) |
| A7 | (5.33; 6.33; 7.17) | (7.00; 7.83; 8.33) | (6.67; 7.67; 8.17) | (6.00; 7.00; 7.50) | (7.33; 8.33; 8.67) | (3.67; 4.67; 5.67) | (6.67; 7.67; 8.17) |
| A8 | (4.33; 5.33; 6.33) | (5.17; 6.00; 6.50) | (4.50; 5.33; 6.00) | (3.83; 4.67; 5.50) | (7.33; 8.33; 8.67) | (4.67; 5.67; 6.33) | (2.67; 3.67; 4.67) |
| A9 | (5.00; 6.00; 6.83) | (2.67; 3.50; 4.33) | (5.17; 6.00; 6.50) | (4.83; 5.67; 6.50) | (4.50; 5.33; 6.17) | (6.67; 7.67; 8.33) | (3.17; 4.00; 4.83) |
| A10 | (7.00; 8.00; 8.33) | (4.67; 5.67; 6.50) | (6.67; 7.33; 7.83) | (5.83; 6.83; 7.50) | (4.17; 5.00; 5.67) | (4.67; 5.67; 6.67) | (2.83; 3.67; 4.50) |
| C1 | C2 | C3 | C4 | C5 | C6 | C7 | |
|---|---|---|---|---|---|---|---|
| A1 | (0.05; 0.07; 0.10) | (0.05; 0.08; 0.15) | (0.03; 0.04; 0.06) | (0.14; 0.23; 0.35) | (0.03; 0.05; 0.08) | (0.03; 0.06; 0.09) | (0.10; 0.17; 0.26) |
| A2 | (0.05; 0.07; 0.10) | (0.04; 0.06; 0.12) | (0.03; 0.13; 0.21) | (0.16; 0.26; 0.37) | (0.02; 0.04; 0.06) | (0.02; 0.04; 0.06) | (0.12; 0.19; 0.28) |
| A3 | (0.04; 0.06; 0.08) | (0.04; 0.07; 0.12) | (0.05; 0.09; 0.15) | (0.09; 0.15; 0.24) | (0.02; 0.04; 0.07) | (0.02; 0.03; 0.06) | (0.09; 0.15; 0.23) |
| A4 | (0.05; 0.07; 0.10) | (0.05; 0.09; 0.15) | (0.07; 0.12; 0.19) | (0.09; 0.15; 0.24) | (0.02; 0.03; 0.06) | (0.02; 0.03; 0.05) | (0.10; 0.18; 0.27) |
| A5 | (0.04; 0.06; 0.09) | (0.06; 0.10; 0.16) | (0.08; 0.13; 0.20) | (0.13; 0.21; 0.33) | (0.02; 0.04; 0.07) | (0.02; 0.04; 0.06) | (0.13; 0.22; 0.31) |
| A6 | (0.02; 0.04; 0.06) | (0.04; 0.07; 0.12) | (0.05; 0.08; 0.15) | (0.08; 0.14; 0.24) | (0.03; 0.05; 0.09) | (0.02; 0.04; 0.07) | (0.07; 0.13; 0.21) |
| A7 | (0.03; 0.05; 0.09) | (0.07; 0.12; 0.19) | (0.08; 0.13; 0.20) | (0.13; 0.21; 0.31) | (0.04; 0.06; 0.09) | (0.02; 0.04; 0.07) | (0.12; 0.19; 0.28) |
| A8 | (0.03; 0.04; 0.08) | (0.05; 0.09; 0.15) | (0.05; 0.09; 0.15) | (0.08; 0.14; 0.23) | (0.04; 0.06; 0.09) | (0.03; 0.05; 0.08) | (0.05; 0.09; 0.16) |
| A9 | (0.03; 0.05; 0.08) | (0.03; 0.05; 0.10) | (0.06; 0.10; 0.16) | (0.10; 0.17; 0.27) | (0.02; 0.04; 0.07) | (0.04; 0.07; 0.10) | (0.06; 0.10; 0.17) |
| A10 | (0.04; 0.07; 0.10) | (0.05; 0.08; 0.15) | (0.08; 0.12; 0.19) | (0.12; 0.21; 0.31) | (0.02; 0.04; 0.06) | (0.03; 0.05; 0.08) | (0.05; 0.09; 0.16) |
| Rank | |||||
|---|---|---|---|---|---|
| A1 | Mechanical failure | 6.269 | 0.789 | 0.1118 | 4 |
| A2 | Electrical failure | 6.204 | 0.872 | 0.1232 | 3 |
| A3 | Information shortage | 6.378 | 0.679 | 0.0963 | 7 |
| A4 | Autonomous driving software failure | 6.300 | 0.761 | 0.1078 | 5 |
| A5 | Low-level software failure | 6.173 | 0.893 | 0.1263 | 2 |
| A6 | Communication bandwidth shortage | 6.413 | 0.645 | 0.0914 | 10 |
| A7 | Cyber-hacking | 6.171 | 0.893 | 0.1264 | 1 |
| A8 | Interruption of uplink | 6.399 | 0.656 | 0.0930 | 9 |
| A9 | A drastic change in the environment | 6.385 | 0.669 | 0.0949 | 8 |
| A10 | Loss of localization | 6.309 | 0.749 | 0.1061 | 6 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pikner, H.; Sell, R.; Majak, J.; Karjust, K. Safety System Assessment Case Study of Automated Vehicle Shuttle. Electronics 2022, 11, 1162. https://doi.org/10.3390/electronics11071162
Pikner H, Sell R, Majak J, Karjust K. Safety System Assessment Case Study of Automated Vehicle Shuttle. Electronics. 2022; 11(7):1162. https://doi.org/10.3390/electronics11071162
Chicago/Turabian StylePikner, Heiko, Raivo Sell, Jüri Majak, and Kristo Karjust. 2022. "Safety System Assessment Case Study of Automated Vehicle Shuttle" Electronics 11, no. 7: 1162. https://doi.org/10.3390/electronics11071162