
Gain Function-Based Visual Tracking Control for Inertial Stabilized Platform with Output Constraints and Disturbances


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- The gain function-based controller is designed to ensure that the system output is constrained to a feasible region to prevent the target loss;
- An active disturbance rejection method is introduced to enhance the high-precision tracking performance of the system when the output error is small.
2. Modeling of ISP Visual Tracking System
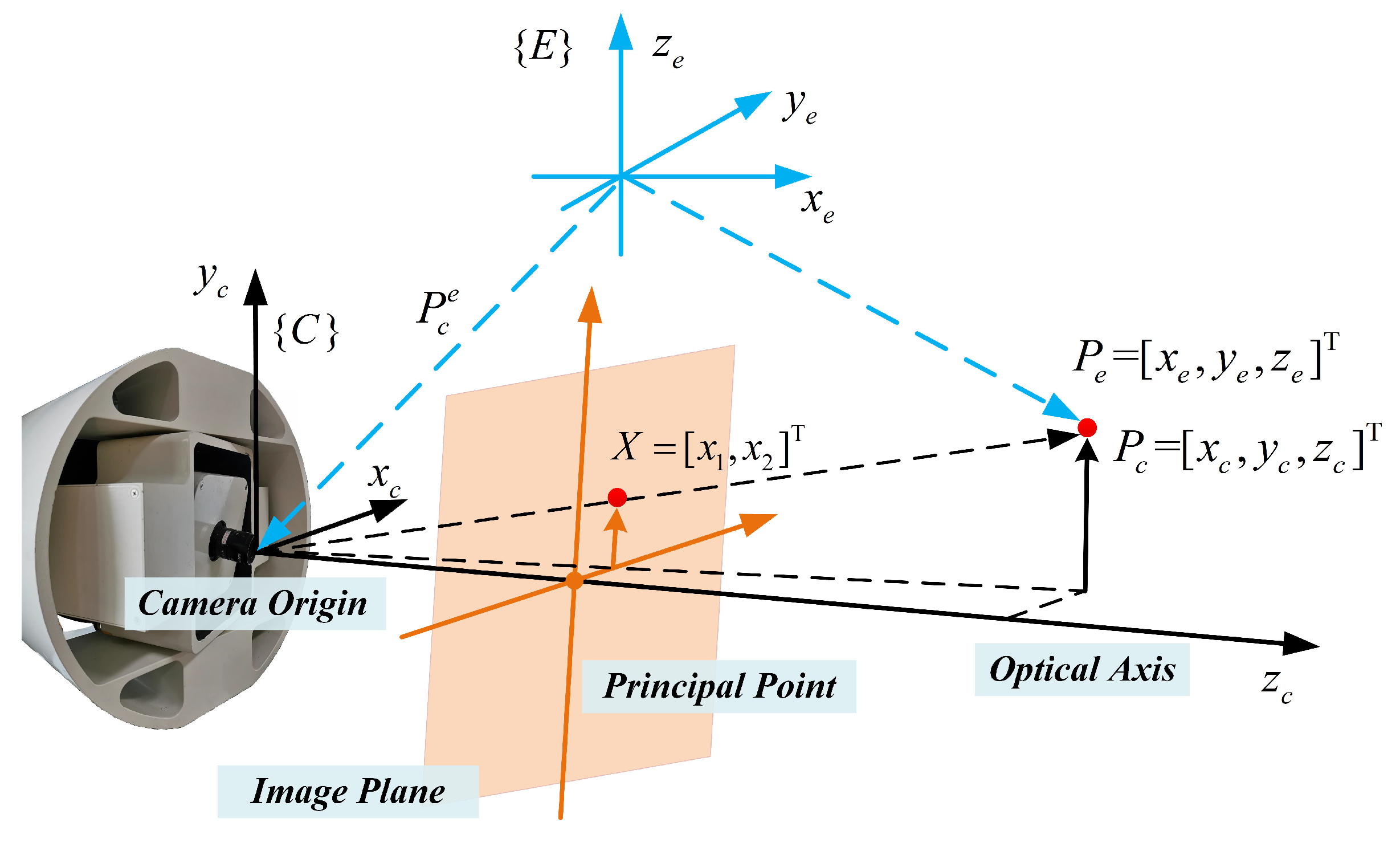
2.1. Visual Tracking System Kinematics
2.2. Control Objective
3. Design of Controller with Output Constraints
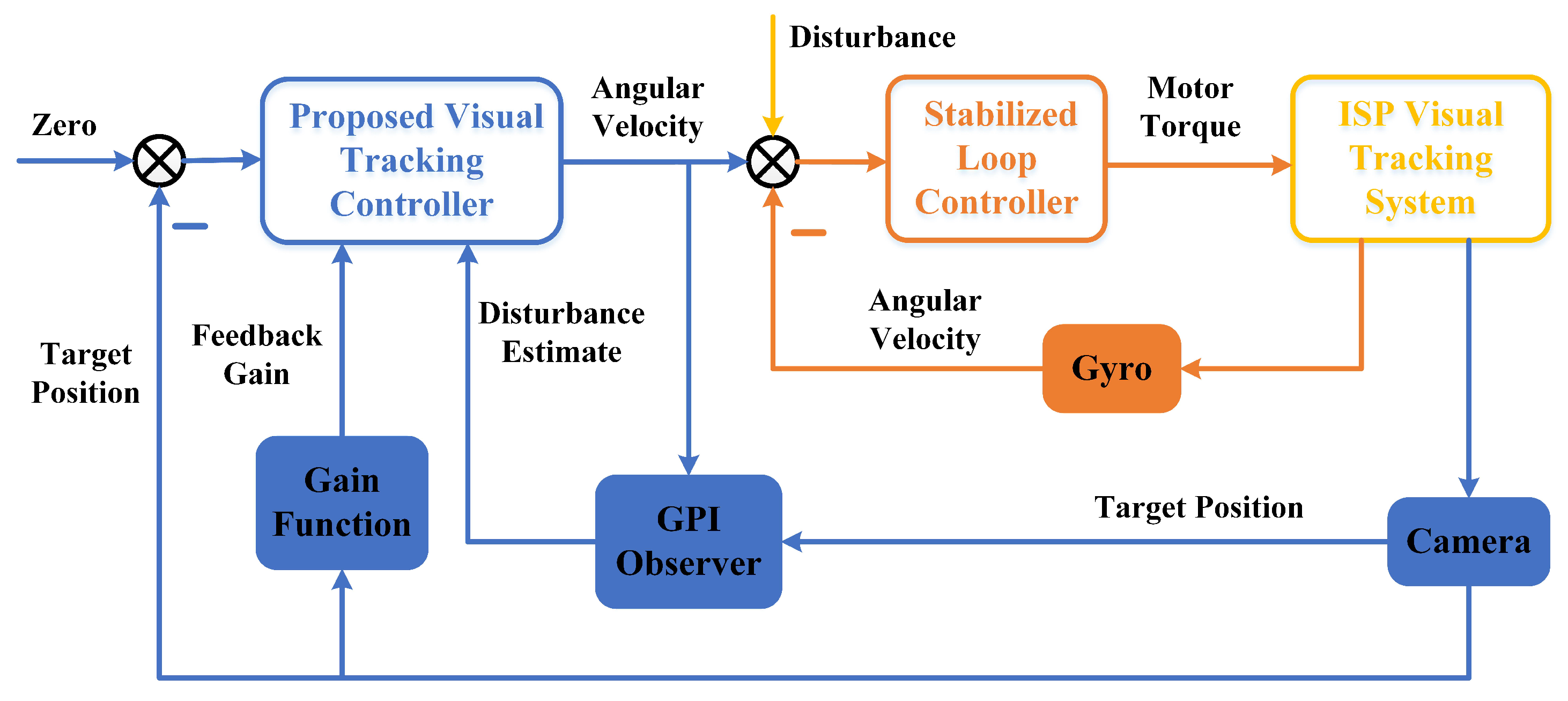
3.1. Disturbance Observer Design
3.2. Gain Function-Based Controller Design with Disturbance Compensation
3.3. Stability Analysis and Proof of Constrained Output
3.3.1. Stability Analysis
3.3.2. Proof of Output Constraints
4. Results of Simulation and Experiment
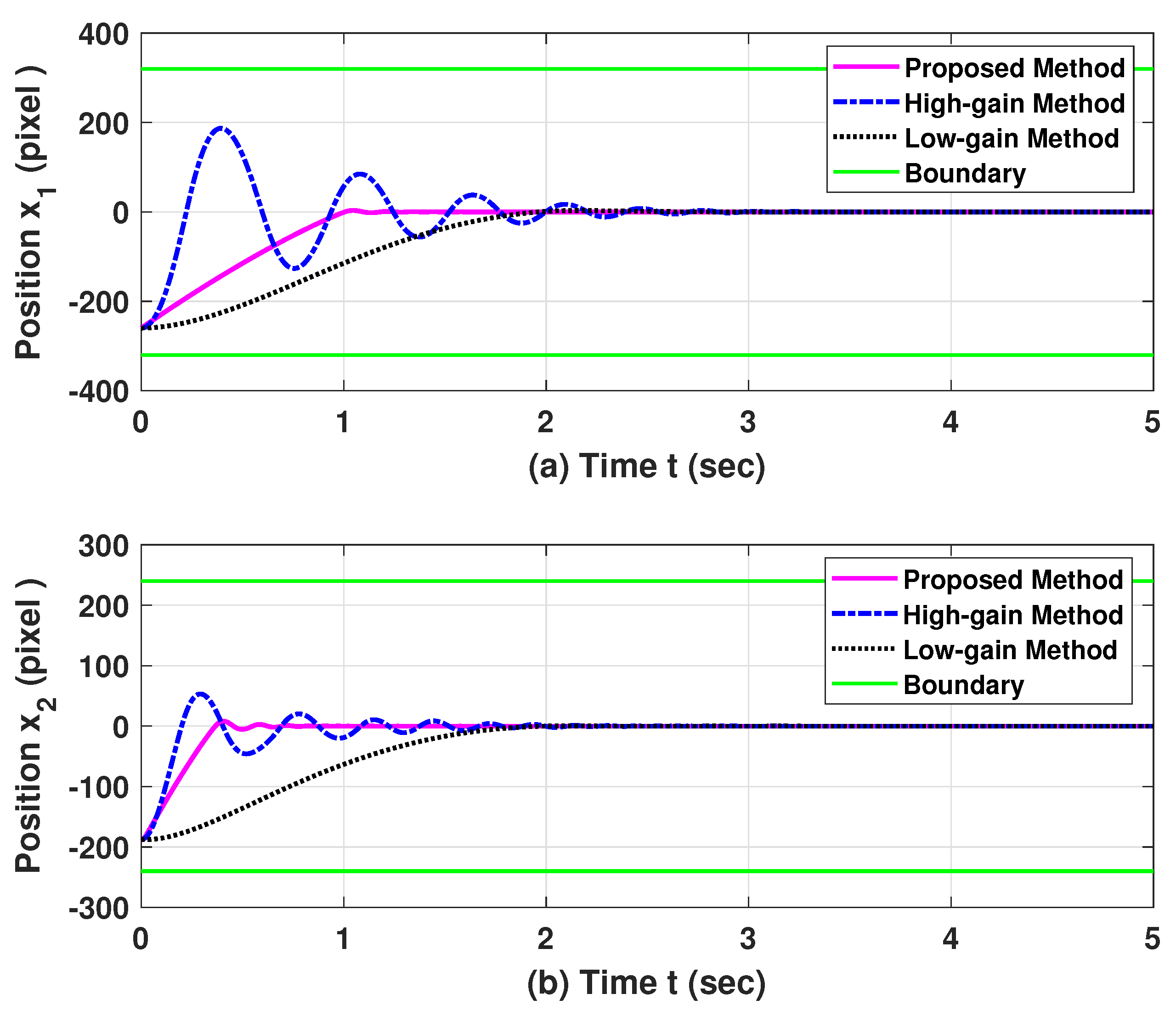
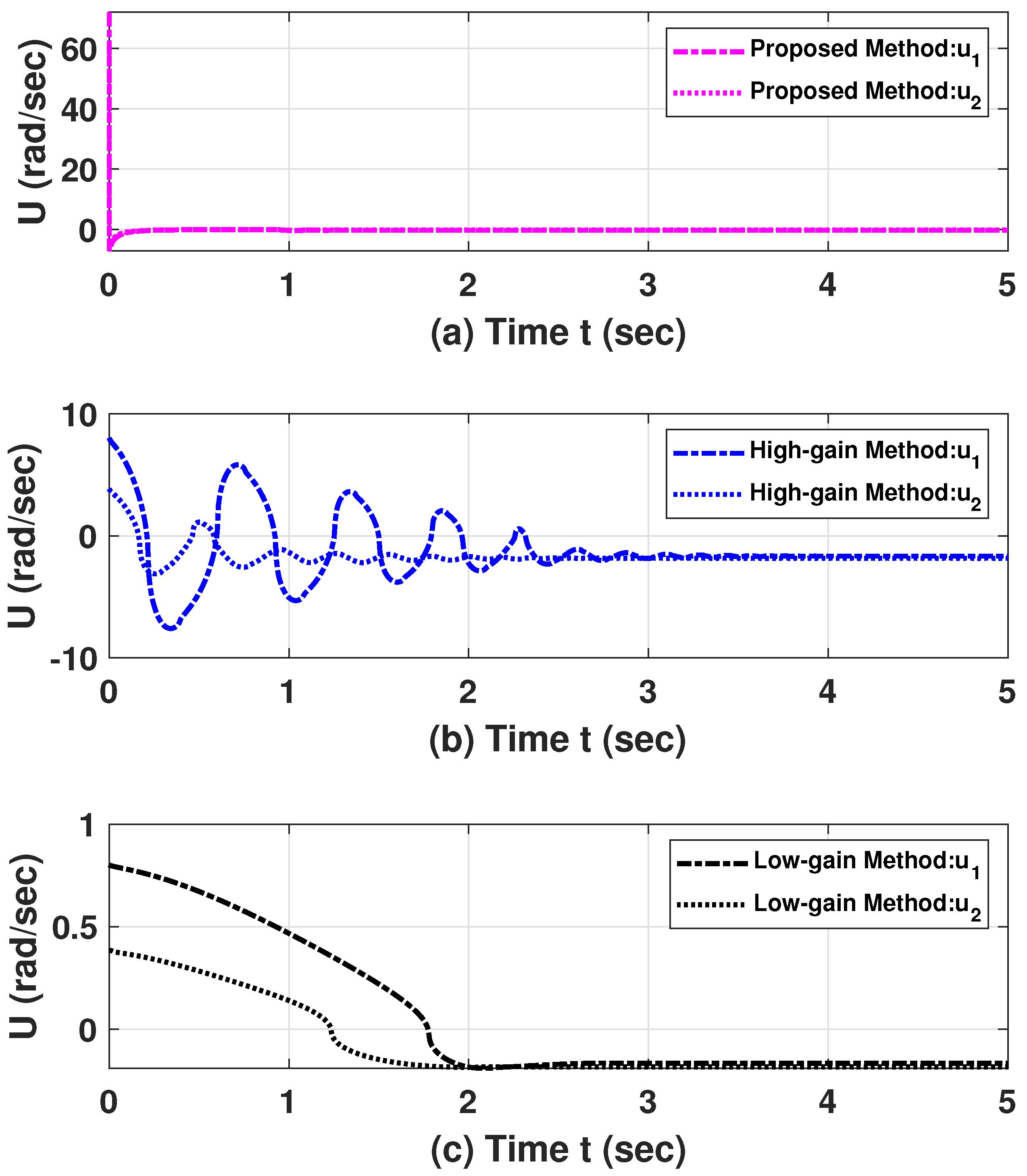
4.1. Numerical Simulations
4.2. Experimental Results
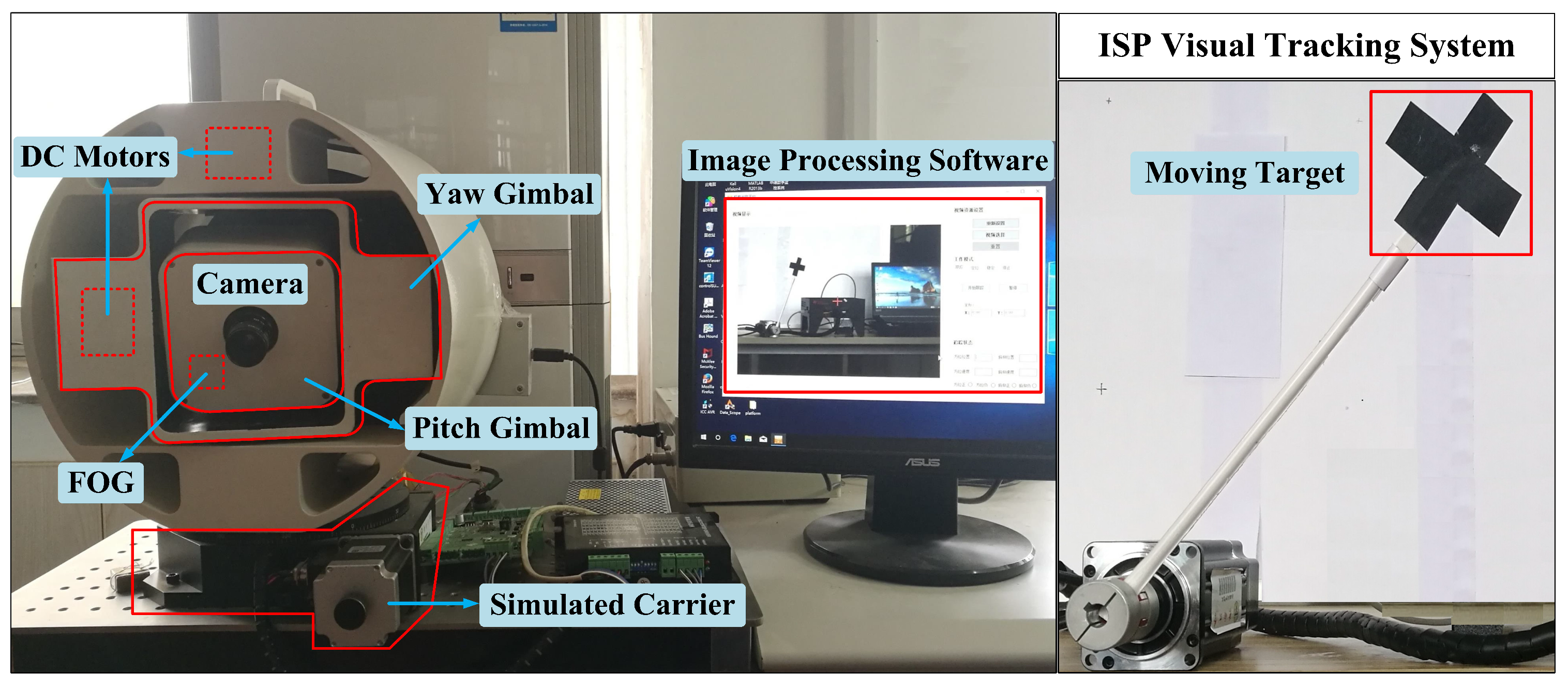
4.2.1. Introduction to Experimental Equipment
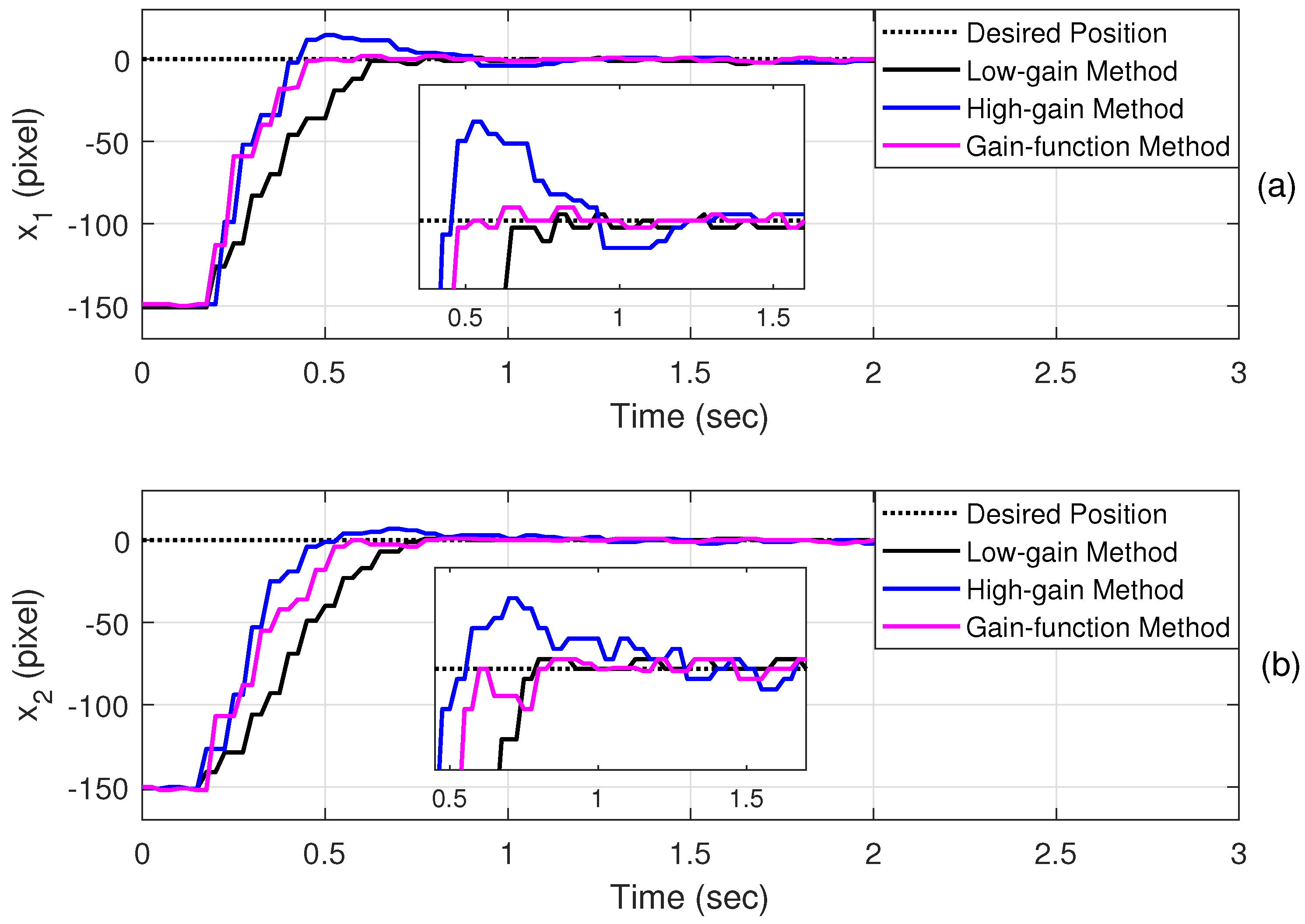
4.2.2. Case 1: Step Response to Target with Large Initial Output Error
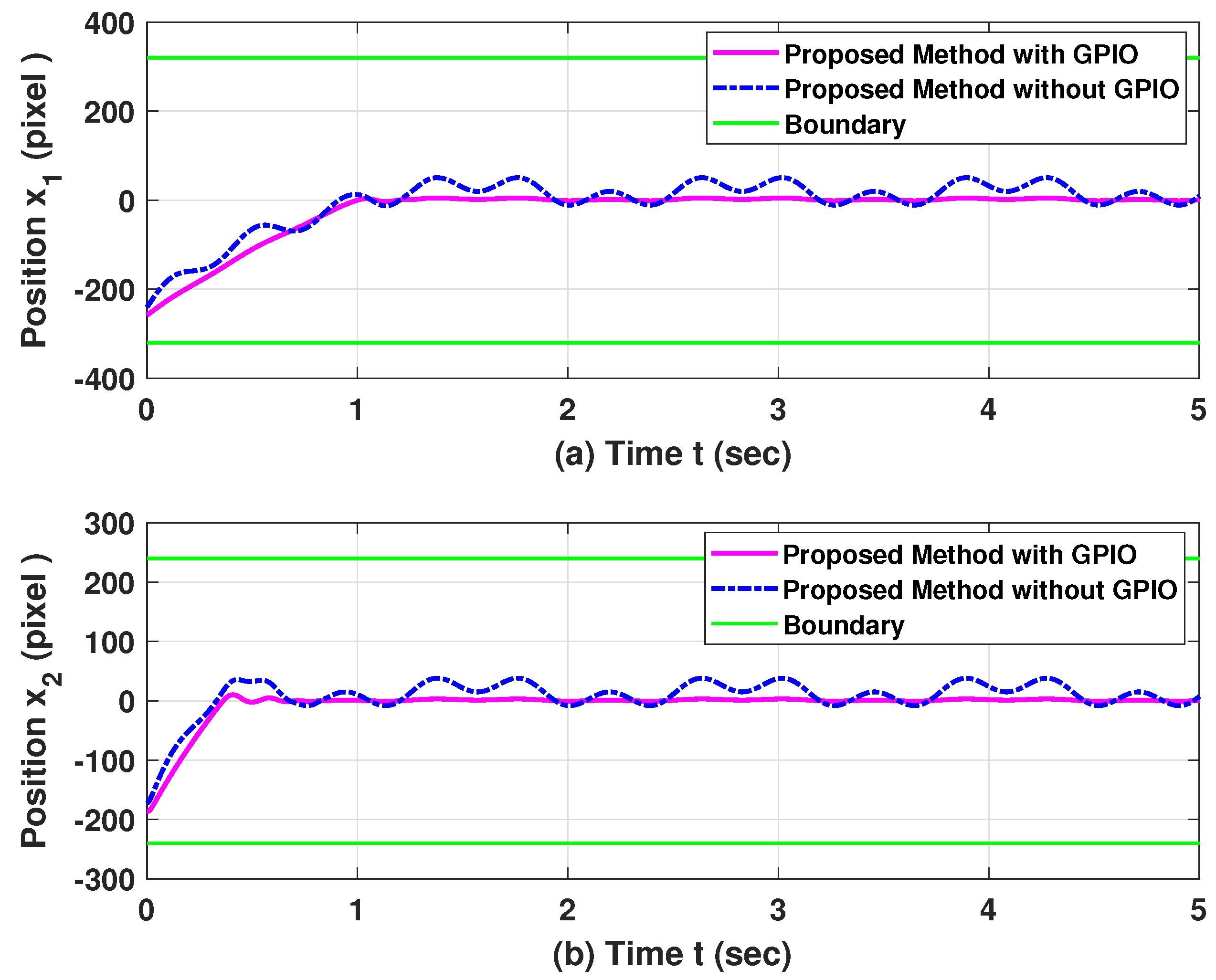
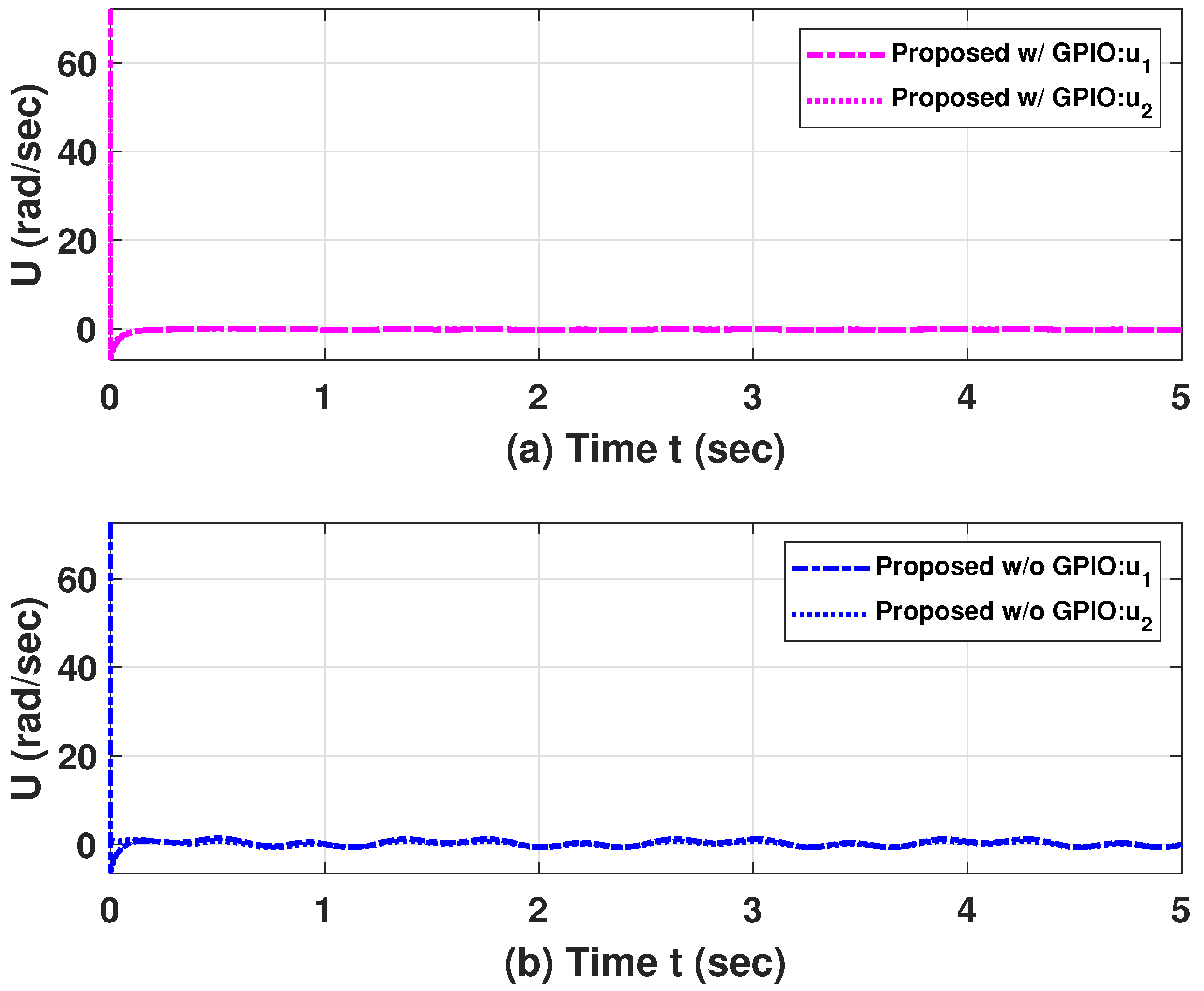
4.2.3. Case 2: Anti-Disturbance Ability of the System
4.2.4. Case 3: Output Constraint Ability of the System
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| ISP | Inertial stabilized platform |
| BLF | Barrier Lyapunov function |
| GPIO | Generalized proportional integral observer |
References
- Li, B.; Fang, Y.; Hu, G.; Zhang, X. Model-Free Unified Tracking and Regulation Visual Servoing of Wheeled Mobile Robots. IEEE Trans. Control Syst. Technol. 2016, 24, 1328–1339. [Google Scholar] [CrossRef]
- Xie, H.; Lynch, A.F.; Low, K.H.; Mao, S. Adaptive Output-Feedback Image-Based Visual Servoing for Quadrotor Unmanned Aerial Vehicles. IEEE Trans. Control Syst. Technol. 2019, 28, 1034–1041. [Google Scholar] [CrossRef]
- Krishnan, G.M.; Sankar, A. Image Space Trajectory Tracking of 6-DOF Robot Manipulator in Assisting Visual Servoing. Automatika 2022, 63, 199–215. [Google Scholar] [CrossRef]
- Zou, Y.; Chen, T.; Chen, X.; Li, J. Robotic Seam Tracking System Combining Convolution Filter and Deep Reinforcement Learning. Mech. Syst. Signal Process. 2022, 165, 108372. [Google Scholar] [CrossRef]
- Jiao, L.; Wang, D.; Bai, Y.; Chen, P.; Liu, F. Deep Learning in Visual Tracking: A Review. IEEE Trans. Neural Netw. Learn. Syst. 2021, 165. [Google Scholar] [CrossRef]
- Hilkert, J.M. Inertially Stabilized Platform Technology Concepts and Principles. IEEE Robot. Autom. Mag. 2008, 28, 26–46. [Google Scholar]
- Lin, Z.; Liu, K.; Zhang, W. Inertially Stabilized Platform for Airborne Remote Sensing Using Magnetic Bearings. IEEE/ASME Trans. Mechatron. 2016, 21, 288–301. [Google Scholar]
- Gao, Q.; Sun, Q.; Qu, F.; Wang, J.; Han, X.; Zhao, J. Line-of-Sight Rate Modeling and Error Analysis of Inertial Stabilized Platforms by Coordinate Transformation. Proc. Inst. Mech. Eng. B J. Eng. Manuf. 2019, 233, 1317–1322. [Google Scholar] [CrossRef]
- Safa, A.; Abdolmalaki, R.Y. Robust Output Feedback Tracking Control for Inertially Stabilized Platforms with Matched and Unmatched Uncertainties. IEEE Trans. Control Syst. Technol. 2017, 27, 118–131. [Google Scholar] [CrossRef]
- Liu, X.; Yang, Y.; Ma, C.; Li, J.; Zhang, S. Real-Time Visual Tracking of Moving Targets Using a Low-Cost Unmanned Aerial Vehicle with a 3-Axis Stabilized Gimbal System. Appl. Sci. 2020, 10, 5064. [Google Scholar] [CrossRef]
- Nguyen, C.D. The Stability of a Two-Axis Gimbal System for the Camera. Sci. World J. 2021, 2021, 9958848. [Google Scholar] [CrossRef]
- Yang, Y.; Yu, C.; Wang, Y.; Hua, N.; Kuang, H. Imaging Attitude Control and Image Motion Compensation Residual Analysis Based on a Three-Axis Inertially Stabilized Platform. Appl. Sci. 2021, 11, 5856. [Google Scholar] [CrossRef]
- Liu, T.; Cao, X.; Jiang, J. Visual Object Tracking with Partition Loss Schemes. IEEE Trans. Intell. Transp. Syst. 2017, 18, 633–642. [Google Scholar] [CrossRef]
- Wu, S.; Li, R.; Shi, Y.; Liu, Q. Vision-Based Target Detection and Tracking System for a Quadcopter. IEEE Access 2021, 9, 62043–62054. [Google Scholar] [CrossRef]
- Feng, S.; Hu, K.; Fan, E.; Zhao, L.; Wu, C. Kalman Filter for Spatial-Temporal Regularized Correlation Filters. IEEE Trans. Image Process. 2021, 30, 3263–3278. [Google Scholar] [CrossRef] [PubMed]
- Larouche, B.P.; Zhu, Z.H. Position-Based Visual Servoing in Robotic Capture of Moving Target Enhanced by Kalman Filter. Int. J. Robot. Autom. 2015, 30, 267–277. [Google Scholar] [CrossRef]
- Nachmani, O.; Coutinho, J.; Khan, A.Z.; Lefevre, P.; Blohm, G. Predicted Position Error Triggers Catch-Up Saccades during Sustained Smooth Pursuit. eNeuro 2020, 7, 31862791. [Google Scholar] [CrossRef] [Green Version]
- Hajiloo, A.; Keshmiri, M.; Xie, W.; Wang, T. Robust Online Model Predictive Control for a Constrained Image-Based Visual Servoing. IEEE Trans. Ind. Electron. 2016, 63, 2242–2250. [Google Scholar]
- Qiu, Z.; Hu, S.; Liang, X.W. Model Predictive Control for Constrained Image-Based Visual Servoing in Uncalibrated Environments. Asian J. Control. 2019, 21, 783–799. [Google Scholar] [CrossRef]
- Sun, D.; Kiselev, A.; Liao, Q.; Stoyanov, T.; Loutfi, A. A New Mixed-Reality-Based Teleoperation System for Telepresence and Maneuverability Enhancement. IEEE Trans. Hum. Mach. Syst. 2020, 50, 55–67. [Google Scholar] [CrossRef] [Green Version]
- Tee, K.P.; Ge, S.S.; Tay, E.H. Barrier Lyapunov Functions for the Control of Output-Constrained Nonlinear Systems. Automatica 2009, 45, 918–927. [Google Scholar] [CrossRef]
- Zhang, Z.; Wu, Y. Adaptive Fuzzy Tracking Control of Autonomous Underwater Vehicles with Output Constraints. IEEE Trans. Fuzzy Syst. 2021, 29, 1311–1319. [Google Scholar] [CrossRef]
- Gao, Y.; Zhang, Z.; Tian, L. Tracking Controllers of Nonlinear Output-Constrained Surface Ships Subjected to External Disturbances. Int. J. Adapt. Control Signal Process. 2021, 36, 484–502. [Google Scholar] [CrossRef]
- Li, Z.; Wang, F.; Zhu, R. Finite-Time Adaptive Neural Control of Nonlinear Systems with Unknown Output Hysteresis. Appl. Math. Comput. 2021, 403, 126175. [Google Scholar] [CrossRef]
- Zheng, A.; Morari, M. Stability of Model Predictive Control with Mixed Constraints. IEEE Trans. Automat. Contr. 1995, 40, 1818–1823. [Google Scholar] [CrossRef]
- Dakhli, I.; Maherzi, E.; Besbes, M. Synthesise of MPC Controller for Uncertain Systems Subject to Input and Output Constraints: Application to Anthropomorphic Robot Arm. Int. J. Autom. Control. 2020, 14, 80–97. [Google Scholar] [CrossRef]
- David, Q.M. Model Predictive Control: Recent Developments and Future Promise. Automatica 2014, 50, 2967–2986. [Google Scholar]
- Chen, Y.; Lu, Y.; Luo, W. Model Predictive Control of Double-Input Buck Converters. J. Power Electron. 2021, 21, 941–950. [Google Scholar] [CrossRef]
- Li, B.; Wang, Y. An Enhanced Model Predictive Controller for Quadrotor Attitude Quick Adjustment with Input Constraints and Disturbances. Int. J. Control Autom. Syst. 2022, 20, 648–659. [Google Scholar] [CrossRef]
- Cha, J.; Kang, S.; Ko, S. Infinite Horizon Optimal Output Feedback Control for Linear Systems with State Equality Constraints. Int. J. Aeronaut. Space Sci. 2019, 20, 483–492. [Google Scholar] [CrossRef]
- Wei, Z.; Lin, X. Stabilization of Planar Switched Systems with an Output Constraint via Output Feedback. ISA Trans. 2021, 122, 198–204. [Google Scholar] [CrossRef] [PubMed]
- Dai, L.; Li, X.; Zhu, Y. Zhang, M. Enhancing Settling Performance of Precision Motion Systems by Phase-Based Variable Gain Feedback Control. IEEE Trans. Ind. Electron. 2021, 68, 4099–4108. [Google Scholar] [CrossRef]
- Gong, C.; Su, Y.; Zhang, D. Variable Gain Prescribed Performance Control for Dynamic Positioning of Ships with Positioning Error Constraints. J. Mar. Sci. Eng. 2022, 10, 74. [Google Scholar] [CrossRef]
- Shi, X.; Xu, S.; Jia, X.; Chu, Y.; Zhang, Z. Adaptive Neural Control of State-Constrained MIMO Nonlinear Systems with Unmodeled Dynamics. Nonlinear Dyn. 2022. [Google Scholar] [CrossRef]
- Guo, J.; Yuan, C.; Zhang, X.; Chen, F. Vision-Based Target Detection and Tracking for a Miniature Pan-Tilt Inertially Stabilized Platform. Electronics 2021, 10, 2243. [Google Scholar] [CrossRef]
- Zohrei, M.; Roosta, A.; Safarinejadian, B. Robust Backstepping Control Based on Neural Network Stochastic Constrained for Three Axes Inertial Stable Platform. J. Aerosp. Eng. 2022, 35, 04021117. [Google Scholar] [CrossRef]
- Mao, J.; Li, S.; Li, Q.; Yang, J. Design and Implementation of Continuous Finite-Time Sliding Mode Control for 2-DOF Inertially Stabilized Platform Subject to Multiple Disturbances. ISA Trans. 2019, 84, 214–224. [Google Scholar] [CrossRef]
- Zheng, G.; Bejarano, F.J.; Perruquetti, W.; Richard, J.P. Unknown Input Observer for Linear Time-Delay Systems. Automatica 2015, 61, 35–43. [Google Scholar] [CrossRef] [Green Version]
- Chen, M.; Xiong, S.; Wu, Q. Tracking Flight Control of Quadrotor Based on Disturbance Observer. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 1414–1423. [Google Scholar] [CrossRef]
- Wang, Z.; She, J.; Liu, Z.; Wu, M. Modified Equivalent-Input-Disturbance Approach to Improving Disturbance-Rejection Performance. IEEE Trans. Ind. Electron. 2022, 69, 673–683. [Google Scholar] [CrossRef]
- Deng, W.; Yao, J. Extended-State-Observer-Based Adaptive Control of Electrohydraulic Servomechanisms without Velocity Measurement. IEEE/ASME Trans. Mechatron. 2020, 25, 1151–1161. [Google Scholar] [CrossRef]
- Khan, R.; Khan, L.; Ullah, S.; Sami, I.; Ro, J.-S. Backstepping Based Super-Twisting Sliding Mode MPPT Control with Differential Flatness Oriented Observer Design for Photovoltaic System. Electronic 2020, 9, 1543. [Google Scholar] [CrossRef]
- Feng, J.; Yin, B. Improved Generalized Proportional Integral Observer Based Control for Systems with Multi-Uncertainties. ISA Trans. 2021, 111, 96–107. [Google Scholar] [CrossRef] [PubMed]










Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, X.; Yang, J.; Qiao, P. Gain Function-Based Visual Tracking Control for Inertial Stabilized Platform with Output Constraints and Disturbances. Electronics 2022, 11, 1137. https://doi.org/10.3390/electronics11071137
Liu X, Yang J, Qiao P. Gain Function-Based Visual Tracking Control for Inertial Stabilized Platform with Output Constraints and Disturbances. Electronics. 2022; 11(7):1137. https://doi.org/10.3390/electronics11071137
Chicago/Turabian StyleLiu, Xiangyang, Jun Yang, and Pengyu Qiao. 2022. "Gain Function-Based Visual Tracking Control for Inertial Stabilized Platform with Output Constraints and Disturbances" Electronics 11, no. 7: 1137. https://doi.org/10.3390/electronics11071137