
Revolution in Flexible Wearable Electronics for Temperature and Pressure Monitoring—A Review




Abstract
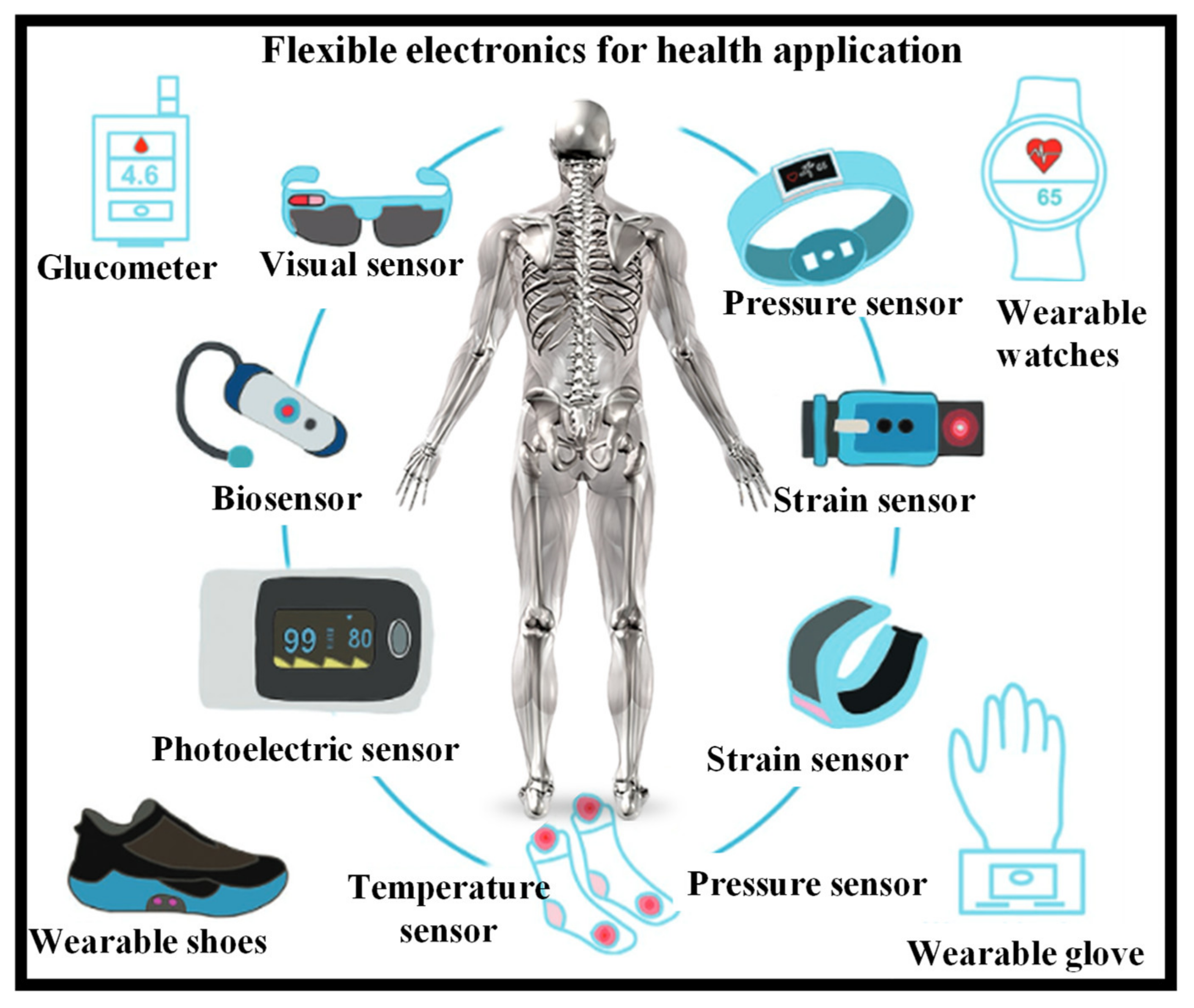
:1. Introduction
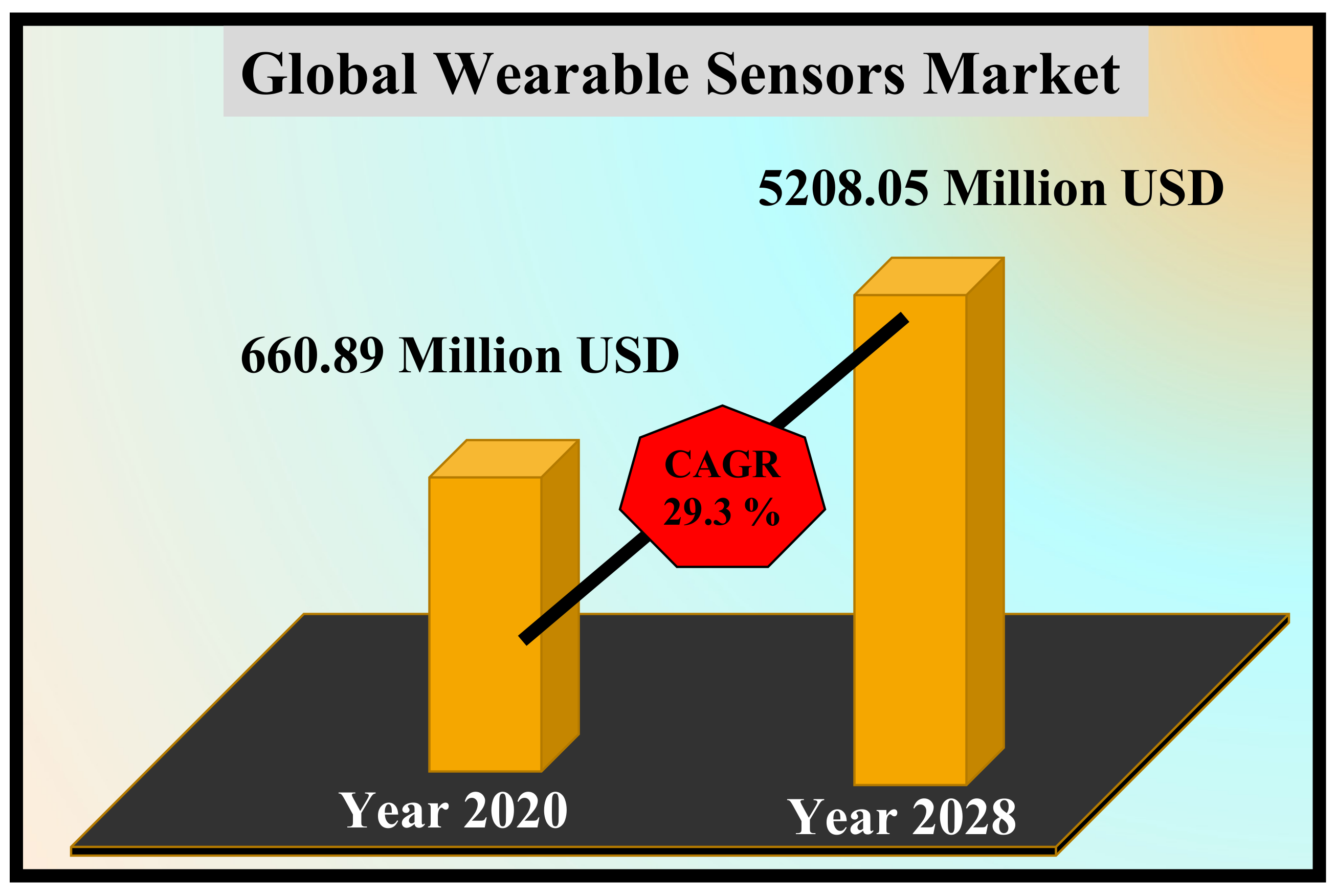
2. Worldwide Wearable Sensing Demand
3. Materials Requirement of Wearable Sensing Apparatuses
4. Flexile Wearable Tsensing Apparatuses
4.1. Types of Tsensing Apparatuses
4.2. Developments in Wearable Tsensing Apparatuses
5. Flexile Wearable Psensing Apparatuses
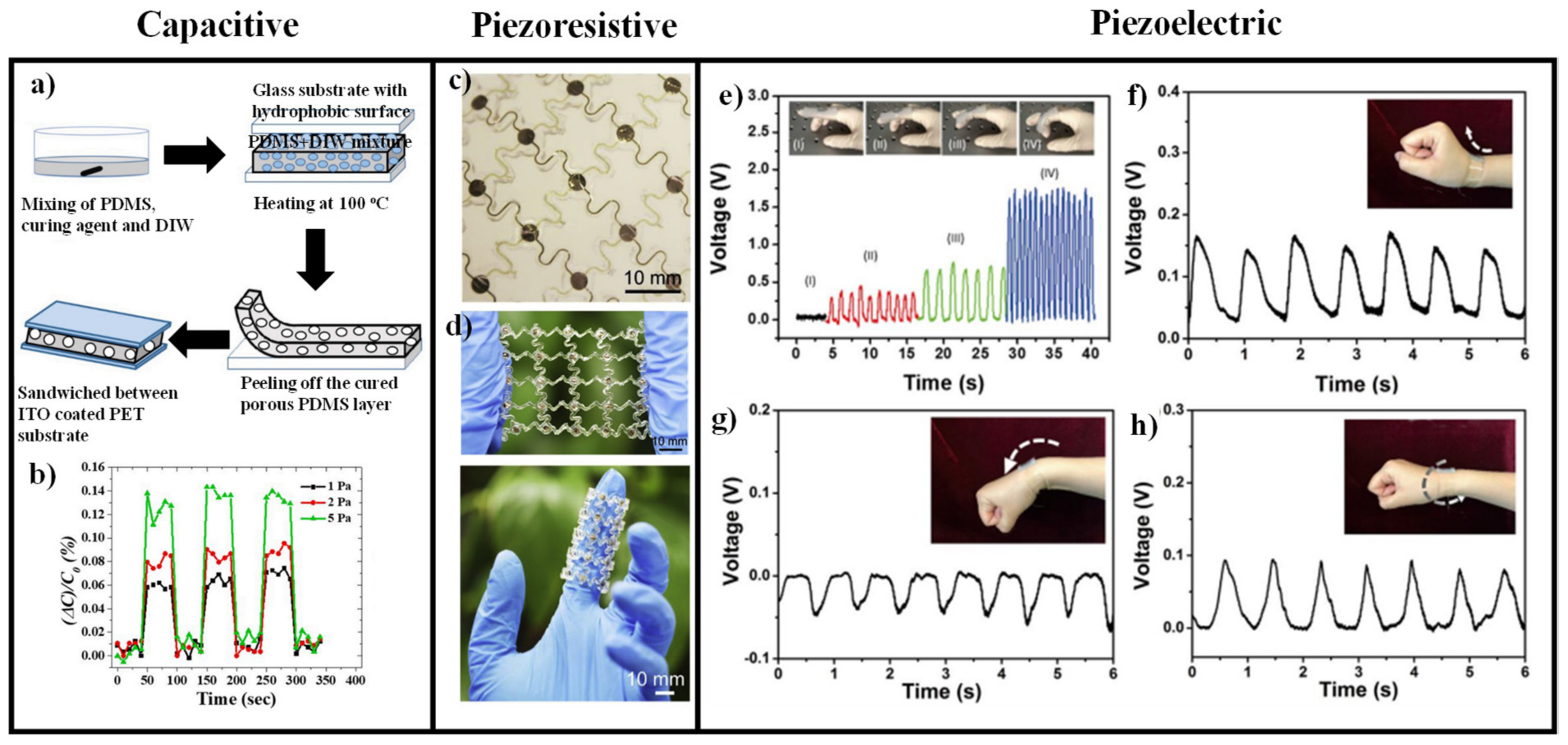
5.1. Types of Psensing Apparatuses
5.2. Other Types of Psensing Apparatuses
5.3. Development in Wearable Psensing Apparatuses

5.4. Prospects of the Psensing Instruments
- (1)
- Ultra-sensitivity is a required trend in Psensing instrument development in the future. Even though several high-sensitivity Psensing instruments have been produced, the sensitivity of the Psensing instruments developed is insufficient for some high-demand utilizations.
- (2)
- The manufacturing of Psensing instruments will invariably result in the release of some environmentally hazardous compounds. It is critical to developing a low-cost, easy-to-use preparation process as well as high-performance, environmentally friendly functional materials.
- (3)
- To keep up with the forthcoming development trend, Psensing instruments must relate to other flexile instruments and can be merged with big data from the Internet of Things. As a result, another significant difficulty is to connect the flexile wearable Psensing instrument with highly maneuverable signal transmission, data processing unit, power supply, and performance optimization method.
- (4)
- It is critical to build Psensing instrument arrays that can detect many physical qualities concurrently to fulfill the application requirements of electronic skin, wearable electronic instruments, and other utilizations. Currently, most Psensing instrument arrays that detect two or more physical qualities do not rule out the possibility of physical quantities interacting. Temperature, for example, has a significant impact on all other physical quantities; yet monitoring temperature is an essential capability of electronic skin. To meet this application need, novel active materials, structural designs, and transduction principles are being developed. As a result, despite the numerous research studies on wearable Psensing instruments, there are still many problems and solutions to be discovered.
6. Need for Multifunctional Sensing Apparatuses
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kazanskiy, N.; Butt, M.; Khonina, S. Recent advances in wearable optical sensor automation powered by battery versus skin-like battery-free devices for personal healthcare—A review. Nanomaterials 2022, 12, 334. [Google Scholar] [CrossRef] [PubMed]
- Gao, W.; Ota, H.; Kiriya, D.; Takei, K.; Javey, A. Flexible electronics toward wearable sensing. Acc. Chem. Res. 2019, 52, 523–533. [Google Scholar] [CrossRef] [PubMed]
- Linghu, C.; Zhang, S.; Wang, C.; Song, J. Transfer printing techniques for flexible and stretchable inorganic electronics. npj Flex. Electron. 2018, 2, 26. [Google Scholar] [CrossRef]
- He, P.; Cao, J.; Ding, H.; Liu, C.; Neilson, J.; Li, Z.; Kinloch, I.; Derby, B. Screen-printing of a highly conductive graphene ink for flexible printed electronics. ACS Appl. Mater. Interfaces 2019, 11, 35. [Google Scholar] [CrossRef]
- Shao, J.; Chen, X.L.; Li, X.; Tian, H.; Wang, C.; Lu, B. Nanoimprint lithography for the manufacturing of flexible electronics. Sci. China Technol. Sci. 2019, 62, 175–198. [Google Scholar] [CrossRef]
- Aor, B.; Khan, I.; Glinel, K.; Jonas, A.; Demoustier-Champagne, S.; Durrieu, M.-S. Microchannel molding combined with layer-by-layer approach for the formation of three-dimensional tube-like structures by endothelial cells. ACS Appl. Bio Mater. 2020, 3, 1520–1532. [Google Scholar] [CrossRef]
- Serrano, I.; Panda, J.; Edvinsson, T.; Kamalakar, M. Flexible transparent graphene laminates via direct lamination of graphene onto polyethylene naphthalate substrates. Nanoscale Adv. 2020, 2, 3156–3163. [Google Scholar] [CrossRef]
- Kalkal, A.; Kumar, S.; Kumar, P.; Pradhan, R.; Willander, M.; Packirisamy, G.; Kumar, S.; Malhotra, B.D. Recent advances in 3D printing technologies for wearable (bio) sensors. Addit. Manuf. 2021, 46, 102088. [Google Scholar] [CrossRef]
- Pham, S.; Yeap, D.; Escalera, G.; Basu, R.; Wu, X.; Kenyon, N.J.; Hertz-Picciotto, I.; Ko, M.J.; Davis, C.E. Wearable sensor system to monitor physical activity and the physiological effects of heat exposure. Sensors 2020, 20, 855. [Google Scholar] [CrossRef] [Green Version]
- Mendelson, Y.; Duckworth, R.; Comtois, G. A wearable reflectance pulse oximeter for remote physiological monitoring. In Proceedings of the 28th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, New York, NY, USA, 31 August–6 September 2006; pp. 912–915. [Google Scholar]
- Polena, J.; Afzal, D.; Ngai, J.; Li, Y. Temperature sensors based on organic field-effect transistors. Sensors 2022, 10, 12. [Google Scholar] [CrossRef]
- Gunasekaran, S.; Veeralingam, S.; Badhulika, S. One for two strategy of fully integrated textile based supercapacitor powering an ultra-sensitive pressure sensor for wearable applications. J. Energy Storage 2022, 48, 103994. [Google Scholar] [CrossRef]
- Lou, Z.; Wang, Q.; Kara, U.I.; Mamtani, R.S.; Zhou, X.; Bian, H.; Yang, Z.; Li, Y.; Lv, H.; Adera, S.; et al. Biomass-derived carbon heterostructures enable environmentally adaptive wideband electromagnetic wave absorbers. Nano-Micro Lett. 2022, 14, 11. [Google Scholar] [CrossRef]
- Wang, L.; Jiang, K.; Shen, G. Wearable, implantable, and interventional medical devices based on smart electronic skins. Adv. Mater. Technol. 2021, 6, 2100107. [Google Scholar] [CrossRef]
- Liu, Y.; Huang, X.; Zhou, J.; Li, J.; Nejad, S.K.; Yiu, C.K.; Li, H.; Wong, T.H.; Park, W.; Yao, K.; et al. Bandage based energy generators activated by sweat in wireless skin electronics for continuous physiological monitoring. Nano Energy 2022, 92, 106755. [Google Scholar] [CrossRef]
- Zafar, H.; Channa, A.; Jeoti, V.; Stojanovic, G. Comprehensive review on wearable sweat-glucose sensors for continuous glucose monitoring. Sensors 2022, 22, 638. [Google Scholar] [CrossRef]
- Arif, M.; Kattan, A. Physical activities monitoring using wearable acceleration sensors attached to the body. PLoS ONE 2015, 10, e0130851. [Google Scholar] [CrossRef] [Green Version]
- Bayoumy, K.; Gaber, M.; Elshafeey, A.; Mhaimeed, O.; Dineen, E.H.; Marvel, F.A.; Martin, S.S.; Muse, E.D.; Turakhia, M.P.; Tarakji, K.G.; et al. Smart wearable devices in cardiovascular care: Where we are and how to move forward. Nat. Rev. Cardiol. 2021, 18, 581–599. [Google Scholar] [CrossRef]
- Heikenfeld, J.; Jajack, A.; Rogers, J.; Gutruf, P.; Tian, L.; Pan, T.; Li, R.; Khine, M.; Kim, J.; Wang, J.; et al. Wearable sensors: Modalities, challenges, and prospects. Lab Chip 2018, 18, 217–248. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Dai, T.; Zhou, Y.; Mohamed, A.; Yuan, G.; Jia, H. Adhesive and high-sensitivity modified Ti3C2Tx (MXene)-based organohydrogels with wide work temperature range for wearable sensors. J. Colloid Interface Sci. 2022, 613, 94–102. [Google Scholar] [CrossRef]
- Brito-Pereira, R.; Ribeiro, C.; Pereira, N.; Lanceros-Mendez, S.; Martins, P. Printed multifunctional magnetically activated energy harvester with sensing capabilities. Nano Energy 2022, 94, 106885. [Google Scholar] [CrossRef]
- Available online: https://www.persistencemarketresearch.com/market-research/smart-watch-market.asp (accessed on 5 January 2022).
- Available online: https://www.globenewswire.com/en/news-release/2021/12/14/2351923/0/en/Wearable-Sensors-Market-size-worth-5-208-05-Million-Globally-by-2028-at-29-3-CAGR-Verified-Market-Research.html (accessed on 5 January 2022).
- Available online: https://www.verifiedmarketresearch.com/product/wearable-sensors-market/ (accessed on 5 January 2022).
- Tang, S. Wearable sensors for sports performance. Text. Sportsw. 2015, 6, 169–196. [Google Scholar]
- Seshadri, D.; Li, R.; Voos, J.; Rowbottom, J.; Alfes, C.; Zorman, C.; Drummond, C. Wearable sensors for monitoring the physiological and biochemical profile of the athlete. npj Digit. Med. 2019, 2, 72. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kwasnicki, R.; Chen, C.-M.; Noakes, A.; Hettiaratchy, S.; Yang, G.-Z.; Darzi, A. Developing a wearable sensor for continuous tissue oxygenation monitoring: A proof of concept study. J. Reconstr. Microsurg. Open 2021, 6, 11. [Google Scholar] [CrossRef]
- Shin, S.-H.; Ji, S.; Choi, S.; Pyo, K.-H.; An, B.W.; Park, J.; Kim, J.; Kim, J.-Y.; Lee, K.-S.; Kwon, S.-Y.; et al. Integrated arrays of air-dielectric graphene transistors as transparent active-matrix pressure sensors for wide pressure ranges. Nat. Commun. 2017, 8, 14950. [Google Scholar] [CrossRef] [Green Version]
- Rodger, D.; Weiland, J.; Humayun, M.; Tai, Y.-C. Scalable high lead-count parylene package for retinal prostheses. Sens. Actuators B Chem. 2006, 117, 107–114. [Google Scholar] [CrossRef]
- Mariello, M.; Fachechi, L.; Guido, F.; Vittorio, M. Conformal, Ultra-thin Skin-Contact-Actuated Hybrid Piezo/Triboelectric Wearable sensor based on AIN and Parylene-Encapsulated Elastomeric Blend. Adv. Funct. Mater. 2021, 31, 2101047. [Google Scholar] [CrossRef]
- Gong, S.; Schwalb, W.; Wang, Y.; Chen, Y.; Tang, Y.; Si, J.; Shirinzadeh, B.; Cheng, W. A wearable and highly sensitive pressure sensor with ultrathin gold nanowires. Nat. Commun. 2014, 5, 3132. [Google Scholar] [CrossRef] [Green Version]
- Gao, W.; Emaminejad, S.; Nyein, H.; Challa, S.; Chen, K.; Peck, A.; Fahad, H.; Ota, H.; Shiraki, H.; Kiriya, D. Fully integrated wearable sensor arrays for multiplexed in situ perspiration analysis. Nature 2016, 529, 509–514. [Google Scholar] [CrossRef] [Green Version]
- Park, Y.-G.; Lee, G.-Y.; Jang, J.; Yun, S.; Kim, E.; Park, J.-U. Liquid metal-based soft electronics for wearable healthcare. Adv. Healthc. Mater. 2021, 10, 2002280. [Google Scholar] [CrossRef]
- Won, P.; Jeong, S.; Majidi, C.; Ko, S. Recent advances in liquid-metal-based wearable electronics and materials. iScience 2021, 24, 102698. [Google Scholar] [CrossRef]
- Park, H.; Park, W.; Lee, C. Electrochemically active materials and wearable biosensors for the in situ analysis of body fluids for human healthcare. NPG Asia Mater. 2021, 13, 23. [Google Scholar] [CrossRef]
- Tai, Y.; Mulle, M.; Ventura, I.; Lubineau, G. A highly sensitive, low-cost, wearable pressure sensor based on conductive hydrogel spheres. Nanoscale 2015, 7, 14766–14773. [Google Scholar] [CrossRef]
- Jung, S.; Kim, J.; Kim, J.; Choi, S.; Lee, J.; Park, I.; Hyeon, T.; Kim, D.-H. Reverse-Micelle-Induced Porous Pressure-Sensitive Rubber for wearable human-machine interfaces. Adv. Mater. 2014, 26, 4825–4830. [Google Scholar] [CrossRef]
- Piro, B.; Mattana, G.; Noel, V. Recent advances in skin chemical sensors. Sensors 2019, 19, 4376. [Google Scholar] [CrossRef] [Green Version]
- Rdest, M.; Janas, D. Carbon nanotube wearable sensors for health diagnostics. Sensors 2021, 21, 5847. [Google Scholar] [CrossRef]
- Niu, H.; Zhang, H.; Yue, W.; Gao, S.; Kan, H.; Zhang, C.; Zhang, C.; Pang, J.; Lou, Z.; Wang, L.; et al. Micro-Nano processing of active layers in flexible tactile sensors via template methods: A review. Small 2021, 17, 2100804. [Google Scholar] [CrossRef]
- Guo, Y.; Wei, X.; Gao, S.; Yue, W.; Li, Y.; Shen, G. Recent advances in carbon material-based multifunctional sensors and their applications in electronic skin systems. Adv. Funct. Mater. 2021, 31, 2104288. [Google Scholar] [CrossRef]
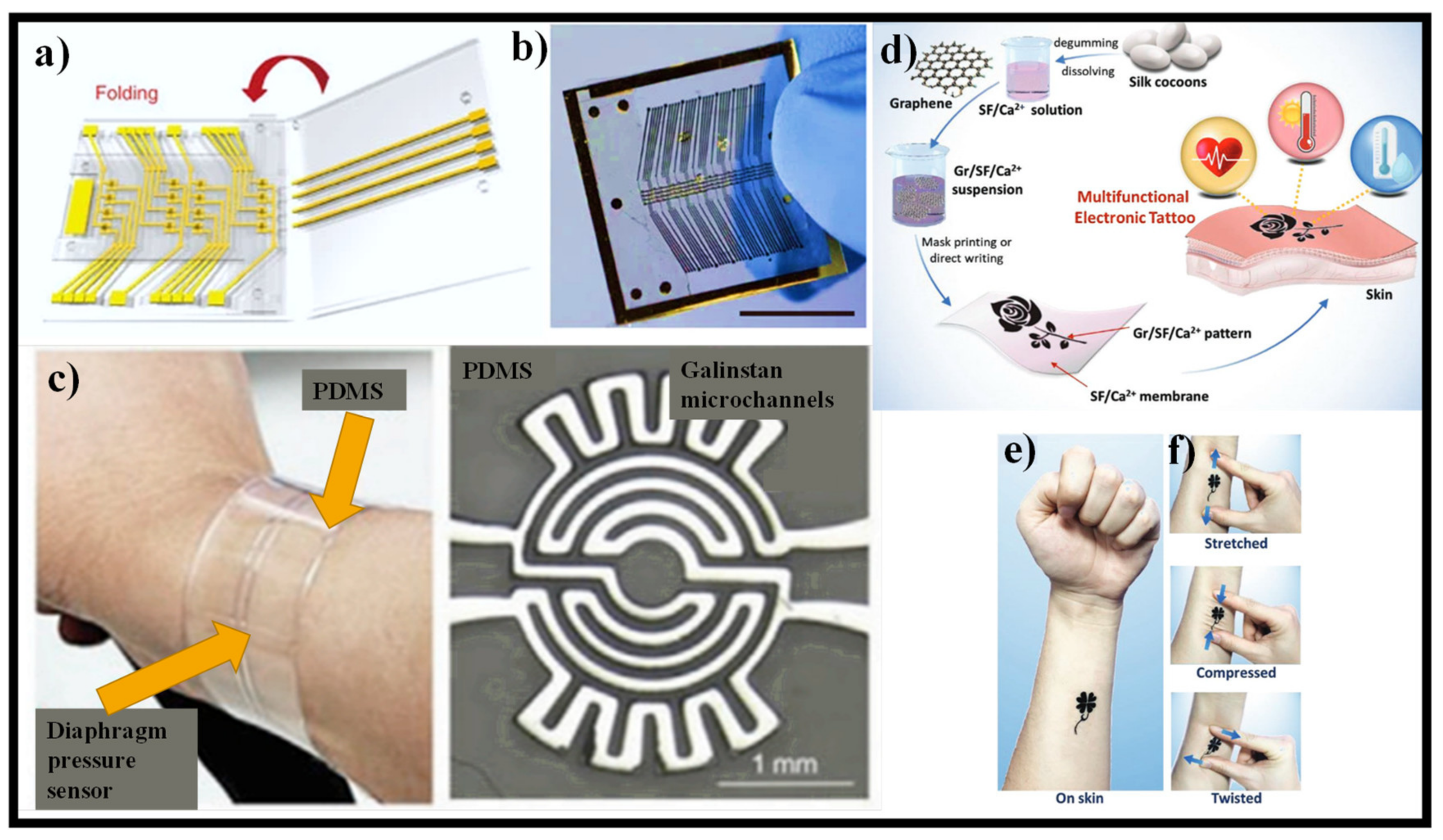
- Gao, Y.; Ota, H.; Schaler, E.W.; Chen, K.; Zhao, A.; Gao, W.; Fahad, H.M.; Leng, Y.; Zheng, A.; Xiong, F.; et al. Wearable microfluidic diaphragm pressure sensor for health and tactile touch monitoring. Adv. Mater. 2017, 29, 1701985. [Google Scholar] [CrossRef] [Green Version]
- Wang, Q.; Ling, S.; Liang, X.; Wang, H.; Lu, H.; Zhang, Y. Self-healable multifunctional electronic tattoos based on silk and graphene. Adv. Funct. Mater. 2019, 29, 1808695. [Google Scholar] [CrossRef]
- Khoshmanesh, K.; Tang, S.-Y.; Zhu, J.; Schaefer, S.; Mitchell, A.; Kalantar-zadeh, K.; Dickey, M. Liquid metal enabled microfluidics. Lab Chip 2017, 17, 974–993. [Google Scholar] [CrossRef]
- Silva, A.; Paisana, H.; Fernandes, T.; Gois, J.; Serra, A.; Coelho, J.; Almeida, A.; Majidi, C.; Tavakoli, M. High resolution soft and stretchable circuits with PVA/Liquid-metal mediated printing. Adv. Mater. Technol. 2020, 5, 2000343. [Google Scholar] [CrossRef]
- Uth, M.-F.; Koch, J.; Sattler, F. Body core temperature sensing: Challenges and new sensor technologies. Procedia Eng. 2016, 168, 89–92. [Google Scholar] [CrossRef]
- Pasadyn, S.; Soudan, M.; Gillinov, M.; Houghtaling, P.; Phelan, D.; Gillinov, N.; Bittel, B.; Desai, M. Accuracy of commercially available heart rate monitors in athletes: A prospective study. Cardiovasc. Diagn. Ther. 2019, 9, 379–385. [Google Scholar] [CrossRef] [PubMed]
- Seshadri, D.; Li, R.; Voos, J.; Rowbottom, J.; Alfes, C.; Zorman, C.; Drummond, C. Wearable sensors for monitoring the internal and external workload of the athlete. npj Digit. Med. 2019, 2, 71. [Google Scholar] [CrossRef]
- Sengupta, P.; Garrity, P. Sensing temperature. Curr. Biol. 2013, 23, R304–R307. [Google Scholar] [CrossRef] [Green Version]
- Kang, L.; Shi, Y.; Zhang, J.; Huang, C.; Zhang, N.; He, Y. A flexible resistive temperature detector (RTD) based on in-situ growth of patterned Ag film on polyimide without lithography. Microelectron. Eng. 2019, 216, 111052. [Google Scholar] [CrossRef]
- Childs, P.; Greenwood, J.; Long, C. Review of temperature measurement. Rev. Sci. Instrum. 2000, 71, 2959–2978. [Google Scholar] [CrossRef] [Green Version]
- Rai, V. Temperature sensors and optical sensors. Appl. Phys. B 2007, 88, 297–303. [Google Scholar] [CrossRef]
- Liu, J.; Liu, M.; Bai, Y.; Zhang, J.; Liu, H.; Zhu, W. Recent progress in flexible wearable sensors for vital sign monitoring. Sensors 2020, 20, 4009. [Google Scholar] [CrossRef]
- Reuter, D.C.; Richardson, C.M.; Pellerano, F.A.; Irons, J.R.; Allen, R.G.; Anderson, M.; Jhabvala, M.D.; Lunsford, A.W.; Montanaro, M.; Smith, R.L.; et al. The thermal infrared sensor (TIRS) on Landsat 8: Design Overview and Pre-launch characterization. Remote Sens. 2015, 7, 1135–1153. [Google Scholar] [CrossRef] [Green Version]
- Park, S.-J.; Jeon, J.-Y.; Kang, B.-C.; Ha, T.-J. Wearable temperature sensors based on lanthanum-doped aluminum-oxide dielectrics operating at low-voltage and high-frequency for healthcare monitoring systems. Ceram. Int. 2021, 47, 4579–4586. [Google Scholar] [CrossRef]
- Honda, W.; Harada, S.; Arie, T.; Akita, S.; Takei, K. Printed Wearable Temperature Sensor for Health Monitoring; IEEE: Valencia, Spain, 2014; pp. 2227–2229. [Google Scholar]
- Ji, X.; Zhong, Y.; Li, C.; Chu, J.; Wang, H.; Xing, Z.; Niu, T.; Zhang, Z.; Du, A. Nanoporous carbon aerogels for laser-printed wearable sensors. ACS Appl. Nano Mater. 2021, 4, 6796–6804. [Google Scholar] [CrossRef]
- Colella, R.; Catarinucci, L. 3D printed wearable sensor tag based on UHF RFID ICs implementing a novel interrogation modality. In Proceedings of the International Conference on IC design & Technology (ICICDT), Otranto, Italy, 4–6 June 2018; pp. 17–20. [Google Scholar]
- Guzman, K.; Morrin, A. Screen-printed Tattoo sensor towards the non-invasive assessment of the skin barrier. Electroanalysis 2017, 29, 188–196. [Google Scholar] [CrossRef]
- Barmpakos, D.; Kaltsas, G. A review on humidity, temperature and strain printed sensors-Current trends and future perspectives. Sensors 2021, 21, 739. [Google Scholar] [CrossRef]
- Harper, A.; Diemer, P.; Jurchescu, O. Contact patterning by laser printing for flexible electronics on paper. npj Flex. Electron. 2019, 3, 11. [Google Scholar] [CrossRef]
- Zhang, H.; Moon, S.; Ngo, T. 3D printed electronics of non-contact ink writing techniques: Status and promise. Int. J. Precis. Eng. Manuf. Green Technol. 2020, 7, 511–524. [Google Scholar] [CrossRef]
- Bariya, M.; Shahpar, Z.; Park, H.; Sun, J.; Jung, Y.; Gao, W.; Nyein, H. Roll-to-Roll Gravure printed electrochemical sensors for wearable and medical devices. ACS Nano 2018, 12, 6978–6987. [Google Scholar] [CrossRef]
- Wolfer, T.; Bollgruen, P.; Mager, D.; Overmeyer, L.; Korvink, J. Flexographic and inkjet printing of polymer optical waveguides for fully integrated sensor system. Procedia Technol. 2014, 15, 521–529. [Google Scholar] [CrossRef] [Green Version]
- Juste-Dolz, A.; Avella-Oliver, M.; Puchades, R.; Maquieira, A. Indirect microcontact printing to create functional patterns of physisorbed antibodies. Sensors 2018, 18, 3163. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yang, M.; Xu, K.; Wang, L. Flexible touch sensor for fabricated by double-sided nanoimprint lithography metal transfer. Nanotechnology 2020, 31, 315302. [Google Scholar] [CrossRef]
- Honeychurch, K.; Hart, J. Screen-printed electrochemical sensors for monitoring metal pollutants. TrAC Trends Anal. Chem. 2003, 22, 456–469. [Google Scholar] [CrossRef]
- Huang, Q.; Zhu, Y. Printing conductive nanomaterials for flexible and stretchable electronics: A review of materials, processes, and applications. Adv. Mater. Technol. 2019, 4, 1800546. [Google Scholar] [CrossRef]
- Zhang, C.; Zhu, R.; Yang, W. A micro aerosol sensor for the measurement of airborne ultrafine particles. Sensors 2016, 16, 399. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ahn, J.-H.; Hong, H.-J.; Lee, C.-Y. Temperature-sensing inks using electrohydrodynamic inkjet printing technology. Materials 2021, 14, 5623. [Google Scholar] [CrossRef]
- Yan, K.; Li, J.; Pan, L.; Shi, Y. Inkjet printing for flexible and wearable electronics. APL Mater. 2020, 8, 120705. [Google Scholar] [CrossRef]
- Zikulnig, J.; Hirschl, C.; Rauter, L.; Krivec, M.; Lammer, H. Inkjet printing and characterisation of a resistive temperature sensor on paper substrate. Flex. Print. Electron. 2019, 4, 015008. [Google Scholar] [CrossRef]
- Ali, S.; Hassan, A.; Bae, J.; Lee, C.; Kim, J. All-printed differential temperature sensor for the compensation of bending effects. Langmuir 2016, 32, 11432–11439. [Google Scholar] [CrossRef]
- Shih, W.-P.; Tsao, L.-C.; Lee, C.-W.; Cheng, M.-Y.; Chang, C.; Yang, Y.-J. Flexible temperature sensor array based on a graphite-polydimethylsiloxane composite. Sensors 2010, 10, 3597–3610. [Google Scholar] [CrossRef]
- Ali, S.; Khan, S.; Bermak, A. Inkjet-printed human body temperature sensor for wearable electronics. IEEE Access 2019, 7, 163981. [Google Scholar] [CrossRef]
- Kim, D.-H.; Wang, S.; Keum, H.; Ghaffari, R.; Kim, Y.-S.; Tao, H.; Panilaitis, B.; Li, M.; Kang, Z.; Omenetto, F. Thin, flexible sensors and actuators as Instrumented Surgical sutures for targeted wound monitoring and therapy. Small 2012, 8, 3263–3268. [Google Scholar] [CrossRef]
- Yu, C.; Wang, Z.; Yu, H. A stretchable temperature sensor based on elastically buckled thin film devices on elastomeric substrates. Appl. Phys. Lett. 2010, 95, 141912. [Google Scholar] [CrossRef] [Green Version]
- Lee, C.-Y.; Lin, C.-H.; Lo, Y.-M. Fabrication of a flexible micro temperature sensor for micro reformer applications. Sensors 2011, 11, 3706–3716. [Google Scholar] [CrossRef]
- Sun, Y.-F.; Liu, S.-B.; Meng, F.-L.; Liu, J.-Y.; Jin, Z.; Kong, L.-T.; Liu, J.-H. Metal oxide nanostructures and their gas sensing properties: A review. Sensors 2012, 12, 2610–2631. [Google Scholar] [CrossRef] [Green Version]
- Ben-Shimon, Y.; Ya’akobovitz, A. Flexible and bio-compatible temperature sensors based on carbon nanotube composites. Measurement 2021, 172, 108889. [Google Scholar] [CrossRef]
- Sahatiya, P.; Puttapati, S.; Srikanth, V.; Badhulika, S. Graphene-based wearable temperature sensor and infrared photodetector on a flexible polyimide substrate. Flex. Print. Electron. 2016, 1, 025006. [Google Scholar] [CrossRef]
- Webb, R.; Bonifas, A.; Behnaz, A. Ultrathin conformal devices for precise and continuous thermal characterization of human skin. Nat. Mater. 2013, 12, 938–944. [Google Scholar] [CrossRef]
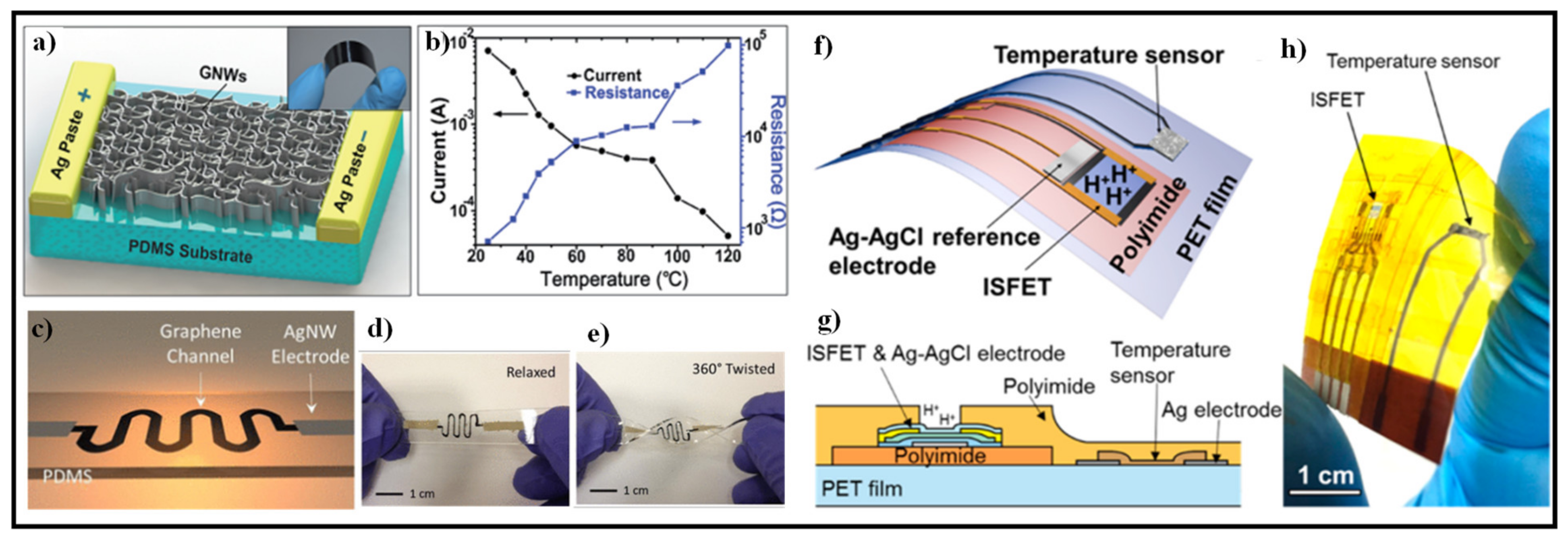
- Yang, J.; Wei, D.; Tang, L.; Song, X.; Luo, W.; Chu, J.; Gao, T.; Shi, H.; Du, C. Wearable temperature sensor based on graphene nanowalls. RCS Adv. 2015, 5, 25609. [Google Scholar] [CrossRef]
- Yan, C.; Wang, J.; Lee, P. Stretchable graphene thermistor with tunable thermal index. ACS Nano 2015, 9, 2130–2137. [Google Scholar] [CrossRef]
- Nakata, S.; Arie, T.; Akita, S.; Takei, K. Wearable, flexible, and multifunctional healthcare device with an ISFET chemical sensor for simultaneous sweat pH and skin temperature monitoring. ACS Sens. 2017, 2, 443–448. [Google Scholar] [CrossRef]
- Gavrilova, M. Machine learning for social behavior understanding. In Proceedings of the Computer Graphics International CGI 2018, Bintan Island, Indonesia, 11–14 June 2018; pp. 247–252. [Google Scholar]
- Niu, H.; Gao, S.; Yue, W.; Li, Y.; Zhou, W.; Liu, H. Highly morphology-controllable and highly sensitive capacitive tactile sensor based on epidermis-dermis-inspired interlocked asymmetric-nanocone arrays for detection of tiny pressure. Small 2020, 16, 1904774. [Google Scholar] [CrossRef]
- Ha, D.; de Vries, W.; John, S.; Irazoqui, P.; Chappell, W. Polymer-based miniature flexible capacitive pressure sensor for intraocular pressure (IOP) monitoring inside a mouse eye. Biomed. Microdevices 2012, 14, 207–215. [Google Scholar] [CrossRef]
- Zhao, H.; Bai, J. Highly sensitive piezo-resistive graphite nanoplatelet-carbon nanotube hybrids/polydimethylsilicone composites with improved conductive network construction. ACS Appl. Mater. Interfaces 2015, 7, 9652–9659. [Google Scholar] [CrossRef]
- Kim, H.; Kim, Y. High performance flexible piezoelectric pressure sensor based on CNTs-doped 0-3 ceramic-epoxy nanocomposites. Mater. Des. 2018, 151, 133–140. [Google Scholar] [CrossRef]
- Zhao, Z.; Huang, Q.; Yan, C.; Liu, Y.; Zeng, X.; Wei, X.; Hu, Y.; Zheng, Z. Machine-washable and breathable pressure sensors based on triboelectric nanogenerators enabled by textile technologies. Nano Energy 2020, 70, 104528. [Google Scholar] [CrossRef]
- Kim, Y.; Oh, J. Recent progress in pressure sensors for wearable electronics: From design to applications. Appl. Sci. 2020, 10, 6403. [Google Scholar] [CrossRef]
- Niu, H.; Yue, W.; Li, Y.; Yin, F.; Gao, S.; Zhang, C.; Kan, H.; Yao, Z.; Jiang, C.; Wang, C. Ultrafast-response/recovery capacitive humidity sensor based on arc-shaped hollow structure with nanocone arrays for human physiological signals monitoring. Sens. Actuators B Chem. 2021, 334, 129637. [Google Scholar] [CrossRef]
- Smith, J.; Eaton, W. Micromachined pressure sensors: Review and recent developments. Smart Mater. Struct. 1997, 6, 530–539. [Google Scholar]
- Meng, Q.; Lu, Y.; Wang, J.; Chen, D.; Chen, J. A piezoresistive pressure sensor with optimized positions and thickness of piezoresistors. Micromachines 2021, 12, 1095. [Google Scholar] [CrossRef] [PubMed]
- Li, R.; Zhou, Q.; Bi, Y.; Cao, S.; Xia, X.; Yang, A.; Li, S.; Xiao, X. Research progress of flexible capacitive pressure sensor for sensitivity enhancement approaches. Sens. Actuators A Phys. 2021, 321, 112425. [Google Scholar] [CrossRef]
- Schwerter, M.; Grabner, D.; Hecht, L.; Vierheller, A.; Leester-Schadel, M.; Dietzel, A. Surface-passive pressure sensor by femtosecond laser glass structuring for flip-chip-in-foil integration. J. Microelectromech. Syst. 2016, 25, 517–523. [Google Scholar] [CrossRef]
- Capineri, L. Resistive sensors with smart textiles for wearable technology: From fabrication processes to integration with electronics. Procedia Eng. 2014, 87, 724–727. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Yu, J.; Cui, Y.; Li, W. Research progress of flexible wearable pressure sensors. Sens. Actuators A Phys. 2021, 330, 112838. [Google Scholar] [CrossRef]
- Xu, F.; Li, X.; Shi, Y.; Li, L.; Wang, W.; He, L. Recent developments for flexible pressure sensors: A review. Micromachines 2018, 9, 580. [Google Scholar] [CrossRef] [Green Version]
- Song, Z.; Li, W.; Bao, Y.; Kong, H.; Gan, S.; Wang, W.; Liu, Z.; Ma, Y.; Han, D.; Niu, L. Space-confined graphene films for pressure-sensing applications. ACS Appl. Nano Mater. 2020, 3, 1731–1740. [Google Scholar] [CrossRef]
- Huang, Y.; Fan, X.; Chen, S.; Zhao, N. Emerging technologies of flexible pressure sensors: Materials, modeling, devices, and manufacturing. Adv. Funct. Mater. 2019, 29, 1–24. [Google Scholar] [CrossRef]
- Wang, X.; Xia, Z.; Zhao, C.; Huang, P.; Zhao, S.; Gao, M.; Nie, J. Microstructured flexible capacitive sensor with high sensitivity based on carbon fiber-filled conductive silicon rubber. Sens. Actuators A Phys. 2020, 312, 112147. [Google Scholar] [CrossRef]
- Yang, J.; Tang, D.; Ao, J.; Ghosh, T.; Neumann, T.V.; Zhang, D.; Piskarev, Y.; Yu, T.; Truong, V.K.; Xie, K.; et al. Ultrasoft liquid metal elastomer foams with positive and negative piezopermittivity for tactile sensing. Adv. Funct. Mater. 2020, 30, 2002611. [Google Scholar] [CrossRef]
- Kim, J.; Chou, E.; Le, J.; Wong, S.; Chu, M.; Khine, M. Soft wearable pressure sensors for beat-to-beat blood pressure monitoring. Adv. Healthc. Mater. 2019, 8, 1900109. [Google Scholar] [CrossRef]
- Liu, Z.-D.; Liu, J.-K.; Wen, B.; He, Q.-Y.; Li, Y.; Miao, F. Cuffless blood pressure estimation using pressure pulse wave signals. Sensors 2018, 18, 4227. [Google Scholar] [CrossRef] [Green Version]
- Kaisti, M.; Panula, T.; Leppanen, J.; Punkkinen, R.; Tadi, M.; Vasankari, T. Clinical assessment of a non-invasive wearable MEMS pressure sensor array for monitoring of arterial pulse waveform, heart rate and detection of atrial fibrillation. npj Digit. Med. 2019, 2, 39. [Google Scholar] [CrossRef] [Green Version]
- Mannsfeld, S.; Tee, C.; Stoltenberg, R.; Chen, H.; Barman, S.; Muir, B.; Sokolov, A.; Reese, C.; Bao, Z. Highly sensitive flexible pressure sensors with microstructured rubber dielectric layers. Nat. Mater. 2010, 9, 859–864. [Google Scholar] [CrossRef]
- Tao, L.; Zhang, K.; Tian, H.; Liu, Y.; Wang, D.; Chen, Y.; Yang, Y.; Ren, T. Graphene-paper pressure sensor for detecting human motions. ACS Nano 2017, 11, 8790–8795. [Google Scholar] [CrossRef]
- Kim, K.; Hong, S.; Jang, N.; Ha, S.; Lee, H.; Kim, J. Wearable resistive pressure sensor based on highly flexible carbon composite conductors with irregular surface morphology. ACS Appl. Mater. Interfaces 2017, 9, 17499–17507. [Google Scholar] [CrossRef]
- Jian, M.; Xia, K.; Wang, Q.; Yin, Z.; Wang, H.; Wang, C.; Xie, H.; Zhang, M.; Zhang, Y. Flexible and highly sensitive pressure sensors based on bionic hierarchical structures. Adv. Funct. Mater. 2017, 27, 1606066. [Google Scholar] [CrossRef]
- Park, J.; Lee, Y.; Hong, J.; Ha, M.; Jung, Y.; Lim, H.; Kim, S.; Ko, H. Giant tunneling piezoresistance of composite elastomers with interlocked microdome arrays for ultrasensitive and multimodal electronic skins. ACS Nano 2014, 8, 4689–4697. [Google Scholar] [CrossRef] [PubMed]
- Wu, W.; Wen, X.; Wang, Z. Taxel-addressable matrix of vertical-nanowire piezotronic transistors for active and adaptive tactile imaging. Science 2013, 340, 952–957. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhou, J.; Wu, N.; Chen, S.; Lin, S.; Li, W.; Xu, Z.; Yuan, F.; Huang, L.; Hu, B.; Zhou, L. Theoretical study and structural optimization of a flexible piezoelectret-based pressure sensor. J. Mater. Chem. A 2018, 6, 5065–5070. [Google Scholar]
- Patra, S.; Choudhary, R.; Madhuri, R.; Sharma, P. Graphene-based portable, flexible, and wearable sensing platforms: An emerging trend for health care and biomedical surveillance. In Graphene Bioelectronics; Elsevier: Amsterdam, The Netherlands, 2018; pp. 307–338. [Google Scholar]
- Zhang, Q.; Leonardi, F.; Pfattner, R.; Mas-Torrent, M. A solid-state aqueous electrolyte-gated field-effect transistor as a low-voltage operation pressure-sensitive platform. Adv. Mater. Interfaces 2019, 6, 1900719. [Google Scholar] [CrossRef]
- Schwartz, G.; Tee, B.; Mei, J.; Appleton, A.; Kim, D.; Wang, H.; Bao, Z. Flexible polymer transistors with high pressure sensitivity for application in electronic skin and health monitoring. Nat. Commun. 2013, 4, 1859. [Google Scholar] [CrossRef]
- Wang, Z.; Guo, S.; Li, H.; Wang, B.; Sun, Y.; Xu, Z.; Chen, X.; Wu, K.; Zhang, X.; Xing, F. The semiconductor/conductor interface piezoresistive effect in an organic transistor for highly sensitive pressure sensors. Adv. Mater. 2019, 31, 1805630. [Google Scholar] [CrossRef]
- Kyaw, A.; Loh, H.; Yan, F.; Xu, J. A polymer transistor array with a pressure-sensitive elastomer for electronic skin. J. Mater. Chem. C 2017, 5, 12039–12043. [Google Scholar] [CrossRef]
- Fan, F.; Lin, L.; Zhu, G.; Wu, W.; Zhang, R.; Wang, Z. Transparent triboelectric nanogenerators and self-powered pressure sensors based on micropatterned plastic films. Nano Lett. 2012, 12, 3109–3114. [Google Scholar] [CrossRef] [Green Version]
- Rasel, M.; Maharjan, P.; Salauddin, M.; Rahman, M.; Cho, H.; Kim, J.; Park, J. An impedance tunable and highly efficient triboelectric nanogenerator for large-scale, ultra-sensitive pressure sensing applications. Nano Energy 2018, 49, 603–613. [Google Scholar] [CrossRef]
- Mi, H.-Y.; Jing, X.; Zheng, Q.; Fang, L.; Huang, H.-X.; Turng, L.-S.; Gong, S. High-performance flexible triboelectric nanogenerator based on porous aerogels and electrospun nanofibers for anergy harvesting and sensitive self-powered sensing. Nano Energy 2018, 48, 327–336. [Google Scholar] [CrossRef]
- Guo, Y.; Gao, S.; Yue, W.; Zhang, C.; Li, Y. Anodized aluminum oxide-assisted low-cost flexible capacitive pressure sensors based on double-sided nanopillars by a facile fabrication method. ACS Appl. Mater. Interfaces 2019, 11, 48594–48603. [Google Scholar] [CrossRef]
- Bijender; Kumar, A. Flexible and wearable capacitive pressure sensor for blood pressure monitoring. Sens. Bio-Sens. Res. 2021, 33, 100434. [Google Scholar] [CrossRef]
- Yao, W.; Mao, R.; Gao, W.; Chen, W.; Xu, Z.; Gao, C. Piezoresistive effect of superelastic graphene aerogel spheres. Carbon 2020, 158, 418–425. [Google Scholar] [CrossRef]
- Wang, A.; Hu, M.; Zhou, L.; Qiang, X. Self-powered wearable pressure sensors with enhanced piezoelectric properties of aligned P(VDF-TrFE)/MWCNT composites for monitoring human physiological and muscle motion signs. Nanomaterials 2018, 8, 1021. [Google Scholar] [CrossRef] [Green Version]
- Yeo, Y.; Park, S.; Yi, Y.; Kim, D.; Lim, J. Highly sensitive flexible pressure sensors based on printed organic transistors with centro-apically self-organized organic semiconductor microstructures. ACS Appl. Mater. Interfaces 2017, 9, 42996–43003. [Google Scholar] [CrossRef]
- Giovanelli, D.; Farella, E. Force sensing resistor and evaluation of technology for wearable body pressure sensing. J. Sens. 2016, 2016, 9391850. [Google Scholar] [CrossRef] [Green Version]
- Yuan, J.; Dagdeviren, C.; Shi, Y.; Ma, Y.; Feng, X.; Rogers, J.; Huang, Y. Computational models for the determination of depth-dependent mechanical properties of skin with a soft, flexible measurement device. Proc. R. Soc. A 2016, 472, 20160225. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lipomi, D.; Vosgueritchian, M.; Tee, B.-K.; Hellstrom, S.; Lee, J.; Fox, C.; Bao, Z. Skin-like pressure and strain sensors based on transparent elastic films of carbon nanotubes. Nat. Nanotechnol. 2011, 6, 788–792. [Google Scholar] [CrossRef] [PubMed]
- Grabner, D.; Tintelott, M.; Dumstorff, G.; Lang, W. Low-cost thin and flexible screen-printed pressure sensor. Proceedings 2017, 1, 616. [Google Scholar] [CrossRef] [Green Version]
- Moghaddam, M.; Salas, M.; Ersoz, I.; Michels, I.; Lang, W. Study of resin flow in carbon fiber reinforced polymer composites by means of pressure sensors. J. Compos. Mater. 2017, 51, 3585–3594. [Google Scholar] [CrossRef]
- Jia, W.; Bandodkar, A.; Valdes-Ramirez, G.; Windmiller, J.; Yang, Z.; Ramirez, J.; Chan, G.; Wang, J. Electrochemical tattoo biosensors for real-time noninvasive lactate monitoring in human perspiration. Anal. Chem. 2013, 85, 6553–6560. [Google Scholar] [CrossRef]
- Kim, J.; Kim, M.; Lee, M.-S.; Kim, K.; Ji, S.; Kim, Y.-T.; Park, J.; Na, K.; Bae, K.-H.; Kim, H. Wearable smart sensor systems integrated on soft contact lenses for wireless ocular diagnostics. Nat. Commun. 2017, 8, 14997. [Google Scholar] [CrossRef] [Green Version]
- Koh, A.; Kang, D.; Xue, Y.; Lee, S.; Pielak, R.; Kim, J.; Hwang, T.; Min, S.; Banks, A.; Bastien, P. A soft, wearable microfluidic device for the capture, storage, and colorimetric sensing of sweat. Sci. Trans. Med. 2016, 8, 336. [Google Scholar] [CrossRef] [Green Version]
- Kim, J.; Imani, S.; de Araujo, W.; Warchall, J.; Valdes-Ramirez, G.; Paixao, T.; Mercier, P.; Wang, J. Wearable salivary uric acid mouthguard biosensor with integrated wireless electronics. Biosens. Bioelectron. 2015, 74, 1061–1068. [Google Scholar] [CrossRef] [Green Version]
- Roh, E.; Hwang, B.-U.; Kim, D.; Kim, B.-Y.; Lee, N.-E. Stretchable, transparent, ultrasensitive, and patchable strain sensor for human-machine interfaces comprising a nanohybrid of carbon nanotubes and conductive elastomers. ACS Nano 2015, 9, 6252–6261. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, L.; Yang, T.; Li, X.; Zang, X.; Zhu, M.; Wang, K.; Wu, D.; Zhu, H. Wearable and highly sensitive graphene strain sensors for human motion monitoring. Adv. Funct. Mater. 2014, 24, 4666–4670. [Google Scholar] [CrossRef]
- Lee, T.; Lee, W.; Kim, S.-W.; Kim, J.; Kim, B.-S. Flexible textile strain wireless sensor functionalized with hybrid carbon nanomaterials supported ZnO nanowires with controlled aspect ratio. Adv. Funct. Mater. 2016, 26, 6206–6214. [Google Scholar] [CrossRef]
- Dagdeviren, C.; Su, Y.; Joe, P.; Yona, R.; Liu, Y.; Kim, Y.-S.; Huang, Y.; Damadoran, A.; Xia, J.; Martin, L. Conformable amplified lead zirconate titanate sensors with enhanced piezoelectric response for cutaneous pressure monitoring. Nat. Commun. 2014, 5, 4496. [Google Scholar] [CrossRef] [Green Version]
- Choi, H.; Choi, J.; Kim, J.-S.; Choe, J.-H.; Chung, K.; Shin, J.-W.; Kim, J.; Youn, D.-H.; Kim, K.-C.; Lee, J.-I. Flexible and transparent gas molecule sensor integrated with sensing and heating graphene layers. Small 2014, 10, 3685–3691. [Google Scholar] [CrossRef]
- Liu, H.; Li, M.; Voznyy, O.; Hu, L.; Fu, Q.; Zhou, D.; Xia, Z.; Sargent, E.; Tang, J. Physically flexible, rapid-response gas sensor based on colloidal quantum dot solids. Adv. Mater. 2014, 26, 2718–2724. [Google Scholar] [CrossRef]
- Mu, X.; Wang, Z.; Zeng, X.; Mason, A.J. A robust flexible electrochemical gas sensor using room temperature ionic liquid. IEEE Sens. J. 2013, 13, 3976–3981. [Google Scholar] [CrossRef]
- Li, S.; Zhang, Y.; Wang, Y.; Xia, K.; Yin, Z.; Wang, H.; Zhang, M.; Liang, X.; Lu, H.; Zhu, M.; et al. Physical sensors for skin-inspired electronics. InfoMat 2019, 2, 184–211. [Google Scholar] [CrossRef]
- Boutry, C.; Kaizawa, Y.; Schroeder, B.; Chortos, A.; Legrand, A.; Wang, Z.; Chang, J.; Fox, P.; Bao, Z. A stretchable and biodegradable strain and pressure sensor for orthopaedic application. Nat. Electron. 2018, 1, 314–321. [Google Scholar] [CrossRef]
- Lei, Z.; Wang, Q.; Wu, P. A multifunctional skin-like sensor based on a 3D printed thermo-responsive hydrogel. Mater. Horiz. 2017, 4, 694–700. [Google Scholar] [CrossRef]
- Lin, M.; Zheng, Z.; Yang, L.; Luo, M.; Fu, L.; Lin, B.; Xu, C. A high performance, sensitive, wearable multifunctional sensor based on rubber/CNT for human motion and skin temperature detection. Adv. Mater. 2022, 34, 2107309. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Transduction Principles | Pros | Cons |
|---|---|---|
| Capacitance | Extraordinary sensitivity, simple structure, big dynamic span, good temperature constancy, fast response, appropriate for small force test. | Poor linearity, vulnerable to EM interference, prone to parasitic capacitance. |
| Piezoresistivity | Simple fabrication process, cost-effective, large deformation, strong anti-interference ability, easy to attain small size. | Poor stability, low sensitivity, poor temperature stability. |
| Piezoelectricity | High sensitivity, fast response, low power utilization | Poor stretchability, low spatial resolution, only applicable to dynamic testing. |
| Transduction Principle | Active Materials | Sensitivity | Minimum Detection | Maximum Detection | Reference |
|---|---|---|---|---|---|
| Capacitance | PDMS microstructure organic field-effect transistor | 0.55 kPa−1 | 3 Pa | 20 kPa | [108] |
| Capacitance | Graphene-paper | 17.2 kPa−1 | 2 kPa | 20 kPa | [109] |
| Piezoresistivity | Vertically aligned CNT/PDMS | 0.3 kPa−1 | 2 Pa | 10 kPa | [110] |
| Piezoresistivity | ACNT/G/PDMS | 19.8 kPa−1 | 0.6 Pa | 0.3 kPa | [111] |
| Piezoresistivity | CNTs/PDMS interlocked microdome | 15.1 kPa−1 | 0.2 Pa | 59 kPa | [112] |
| Piezoelectricity | ZnO nanorod | - | 3.5 kPa | 31.5 kPa | [113] |
| Piezoelectricity | Perfluoroalkoxy alkane | 15 V kPa−1 | - | 2.5 kPa | [114] |
| Piezoelectricity | Polyvinylidene difluoride | - | 1 kPa | 30 kPa | [115] |
| Reference | Sensor Type | Sensing Element | Substrate | Electrode Material | Active Material |
|---|---|---|---|---|---|
| [133] | Bio | Lactate | Temporary transfer tattoo paper, GORETEX | silver/AgCl, conductive carbon | Lactate oxidase |
| [134] | Bio | Glucose | PDMS, Polyimide, Parylene | Graphene/AgNW | Graphene, glucose oxidase |
| [135] | Bio | Glucose, Lactate | polydimethylsiloxane | - | Enzyme and chromogenic reagent |
| [136] | Bio | Salivary Uric acid | polyethylene terephthalate | silver/AgCl | Prussian-blue-graphite |
| [137] | Strain | Facial expressions | polydimethylsiloxane | Polyurethane-PEDOT:PSS | Single-walled carbon nanotubes |
| [138] | Strain | Heartbeats | polydimethylsiloxane | Graphene woven fabrics | Graphene woven fabrics |
| [130] | Strain | Stretch and pressure | polydimethylsiloxane | Eutectic Gallium Indium | Single-walled CNT-Ecoflex |
| [139] | Strain | Strain | polyethylene terephthalate textile | CNT/reduced Graphene oxide | ZnO Nanowire |
| [75] | Temperature | Resistive | Plastic | Silver interdigital electrodes | - |
| [84] | Temperature | Temperature | polydimethylsiloxane | AgNW | Graphene |
| [76] | Temperature | Endothelial layer | Polyester fabric strip coated with polydimethylsiloxane | gold | Platimum |
| [134] | Pressure | Intraocular Pressure | Parylene | Graphene-AgNW | Ecoflex |
| [140] | Pressure | Cutaneous pressure | Ecoflex | gold | Lead zirconate titanate |
| [28] | Pressure | Pressure | polydimethylsiloxane and Epoxy | gold or AgNW/graphene | Graphene |
| [141] | Gas | Nitrogen dioxide | PES | chromium/gold | Graphene |
| [142] | Gas | Nirogen dioxide | Paper | Gold | NaNO2 treated PbS CQD |
| [143] | Gas | Oxygen | Porous PTFE | Gold | High-purity 1-buty-1-methylpyrrolidinium bis (trifluoro-methylsulfonyl)imide |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Butt, M.A.; Kazanskiy, N.L.; Khonina, S.N. Revolution in Flexible Wearable Electronics for Temperature and Pressure Monitoring—A Review. Electronics 2022, 11, 716. https://doi.org/10.3390/electronics11050716
Butt MA, Kazanskiy NL, Khonina SN. Revolution in Flexible Wearable Electronics for Temperature and Pressure Monitoring—A Review. Electronics. 2022; 11(5):716. https://doi.org/10.3390/electronics11050716
Chicago/Turabian StyleButt, Muhammad A., Nikolay L. Kazanskiy, and Svetlana N. Khonina. 2022. "Revolution in Flexible Wearable Electronics for Temperature and Pressure Monitoring—A Review" Electronics 11, no. 5: 716. https://doi.org/10.3390/electronics11050716