1. Introduction
The super dual auroral radar network (SuperDARN) is one of the most essential pieces of equipment for exploring the ionosphere and magnetosphere at high and mid-latitudes [
1,
2,
3]. There are now more than 35 radars running in the world [
4,
5]. SuperDARN has become a powerful tool for detecting ionospheric plasma convection [
6] for its large geographical coverage and high time resolution [
7]. Utilizing the field of views (FOVs) velocity information of different radars, an ionospheric convection pattern can be effectively created to sense space weather conditions. Accurate geolocation of radar echoes is a significant basis for the above research [
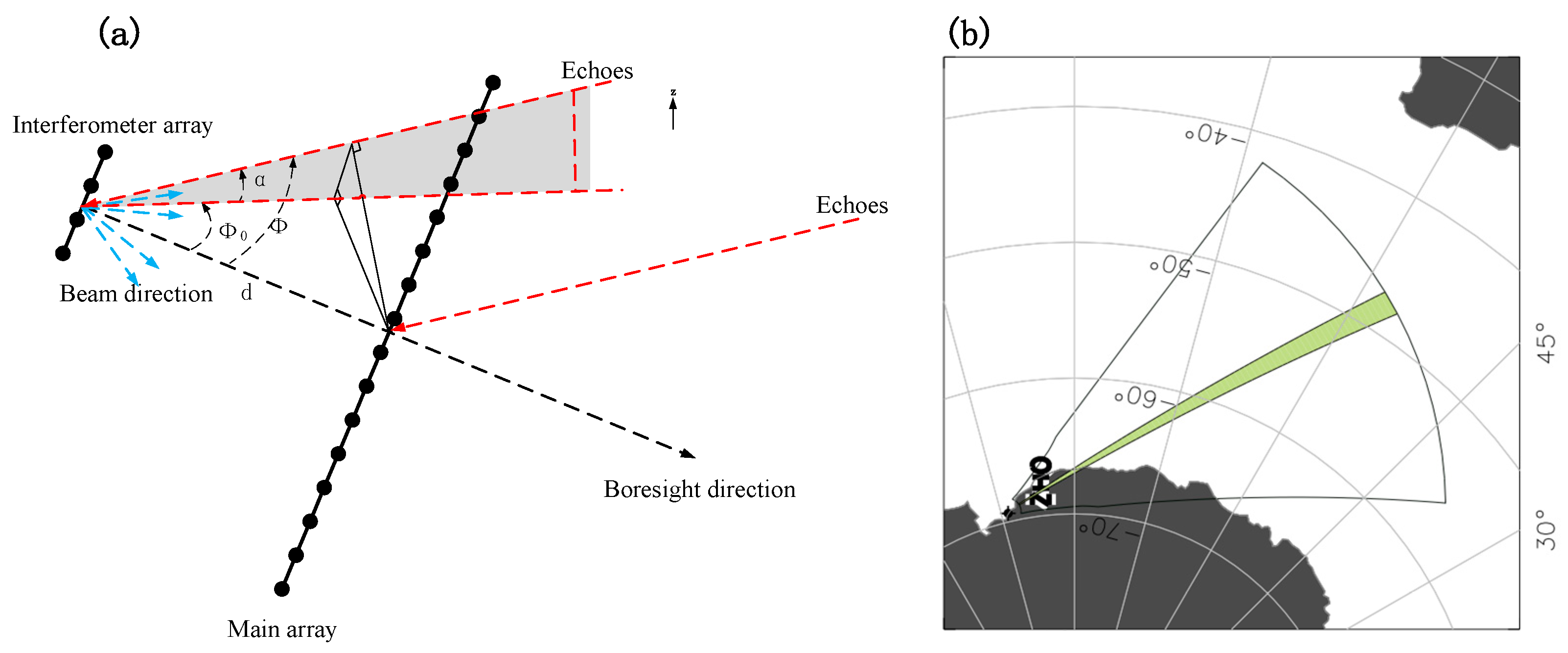
8]. The elevation angle is the main information for the determination of the source of the irregularities, and it is one of the parameters measured by the SuperDARN radar. Many SuperDARN radars are equipped with a main array and interferometer array, and the distance between the two arrays along the radar line of sight is in the order of a hundred meters. For Zhongshan Station, it is about 100 m. The elevation angle is obtained by measuring the phase difference between the received signals of the antenna arrays [
1,
9]. However, due to the propagation time delay (also known as the calibration factor,
) caused by the different propagation paths from the main and auxiliary array to the point at which the return signals from the two arrays are correlated with each other is difficult to be measured, and elevation data have not been fully applied [
10].
The adaptive algorithm is widely used in the current radar signal processing design and has a significant effect. To overcome the analytical and numerical difficulties in the optimal approximation of radar detection, a general reduced-complexity algorithm is proposed and analyzed using an adaptive radar detector with desired behavior [
11]. The detection of the ionospheric target echoes using wideband radar is also common. Wiener filtering is used to denoise the radar echoes containing noise with the desired signal. Synthetic data and real data verified the effectiveness of the detector [
12]. The detection of target echoes by the SuperDARN radar is mainly based on an uncorrelated weighted median filter, which is effective at removing most speckle and Gaussian noise in the echoes [
13]. There have been two methods to estimate the
until recently [
14]. The first one is to measure the delays of the test signals in the radar cable and the equipment [
15]. However, owing to the constraints of the radar geographical location, operating frequency, temperature, or other conditions, these factors cannot be fully controlled, and the dependence between these parameters cannot be evaluated, so we have not considered it. The other one eliminates the influence of the radar hardware itself on the measurement, using elevation data or phase difference data to adjust the
, so that the calculated elevation obeys a specific propagation mode or distribution [
1]. Recently, with the increasing importance of elevation data, some scholars have concentrated on developing significant calibration techniques based on existing elevation data. For example, an empirical virtual height model for interferometry data by studying the distribution relationship between group range-elevation angle and group range-virtual height [
16]; a visual analysis method to detect and calibrate the phase offset in high-frequency interference data [
10]; systematically describing the virtual height with each range of near-range SuperDARN meteor echoes is constant over a set time interval [
9], or using the low-angle propagation mode and the low variability of the E layer echoes to design an automatic calibration procedure [
1]. However, the virtual height model needs to consider the potential effects of time, solar cycles, and beams; in addition, the separation of ionospheric and ground backscatter echoes is difficult [
14]. The meteor scatter method has been studied at different temporal resolutions, but the results have not been fully validated [
9], and near range meteor echoes can be contaminated by back lobe echoes. The E-region method may cause errors in some periods due to the existence of F echoes. Overall, each of the proposed methods lacks a numerical analysis of the estimated calibration factors and calibrate in an independent way.
Considering the possible problems of the above methods, this paper aims to improve the previous technology and proposes a new elevation calibration method based on ground backscatter echoes. Based on the virtual height model, this method takes the peak value of Gaussian fitting in each group range of ground echoes as the input and uses the minimum root mean square error criterion as the condition for estimating , which can achieve a high time resolution. The numerical analysis also minimizes the error caused by the visual analysis. The proposed algorithm improves the time resolution of estimates and verifies, reduces the influence of visual analysis.
The structure of the rest of the paper is as follows.
Section 2 briefly introduces the equipment, data set, and the calculation of the elevation angle.
Section 3 describes the calibration method of elevation angle.
Section 4 presents the discussion of results.
Section 5 concludes the paper.
3. Method
The calibration of the elevation angle is the estimation of the phase offset. First, it is necessary to determine the expected propagation mode of the elevation angle [
10]. For backscatter echoes of the same type, the virtual height reflected by the ionosphere at different group ranges is thought to be constant. That is, the elevation angle measured by the radar should show a nonlinear downward trend with the increase in group range until the elevation angle value approaches zero. According to the basic theory of radio wave propagation, the virtual height is calculated as
where
R is the radius of the Earth, generally, 6371 km, and
r is the group range, that is, the distance from the ionospheric reflection point to the radar station (assuming that the spatial shape of the reflection point to the radar and the scattering point is symmetrical).
In this paper, the root means square error (RMSE) is used as the performance index to evaluate . By tuning to make the RMSE between the distribution of the virtual height and the curve defined by Equation (10) at a minimum, then the best fitting virtual height is selected and the validity of is verified by the virtual height and the original phase data. The previous method selects the group range–elevation angle or group range–phase deviation as a single consideration factor to calibrate the additional phase offset generated by the radar hardware according to the expected change of the low-angle echoes characteristics. However, the error of a single data point can only be verified and excluded by another large amount of data. The technique proposed here can not only eliminate the estimation error of , but also increase the stability of through the mean value in a large time range.
When selecting the optimal
, the virtual height is used as an assessment parameter. The theoretical virtual height with the group range should be in as small of a range as possible, and the distribution of the elevation angle should be consistent with the fitting curve of the virtual height. To quantitatively complete the calculation, the RMSE of the virtual height is calculated using the fitting curve, and the maximum point of Gaussian fitting of the elevation distribution in a range gate is used. The RMSE defined as
is the fitting virtual height based on the peak value of the elevation angle within each range gate, n is the gate number, and is the virtual height calculated by the actual elevation angle.
The method involves combining the visual analysis and numerical analysis by gradually adjusting the value of the calibration factor
(the resolution of
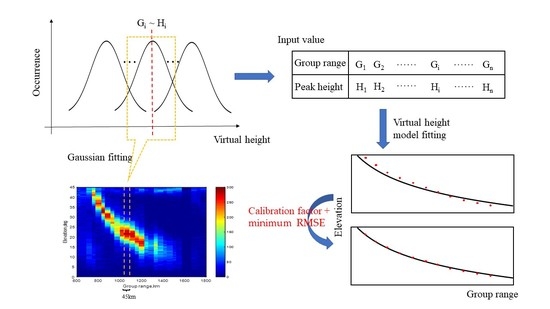
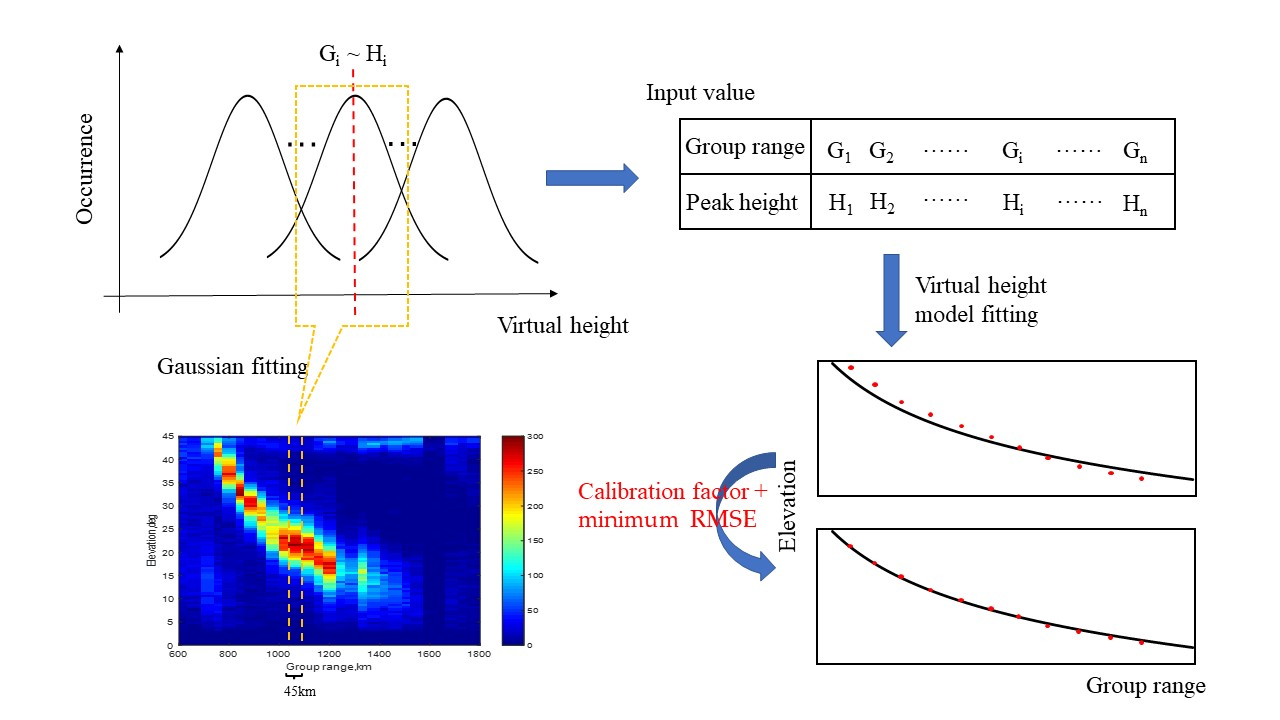
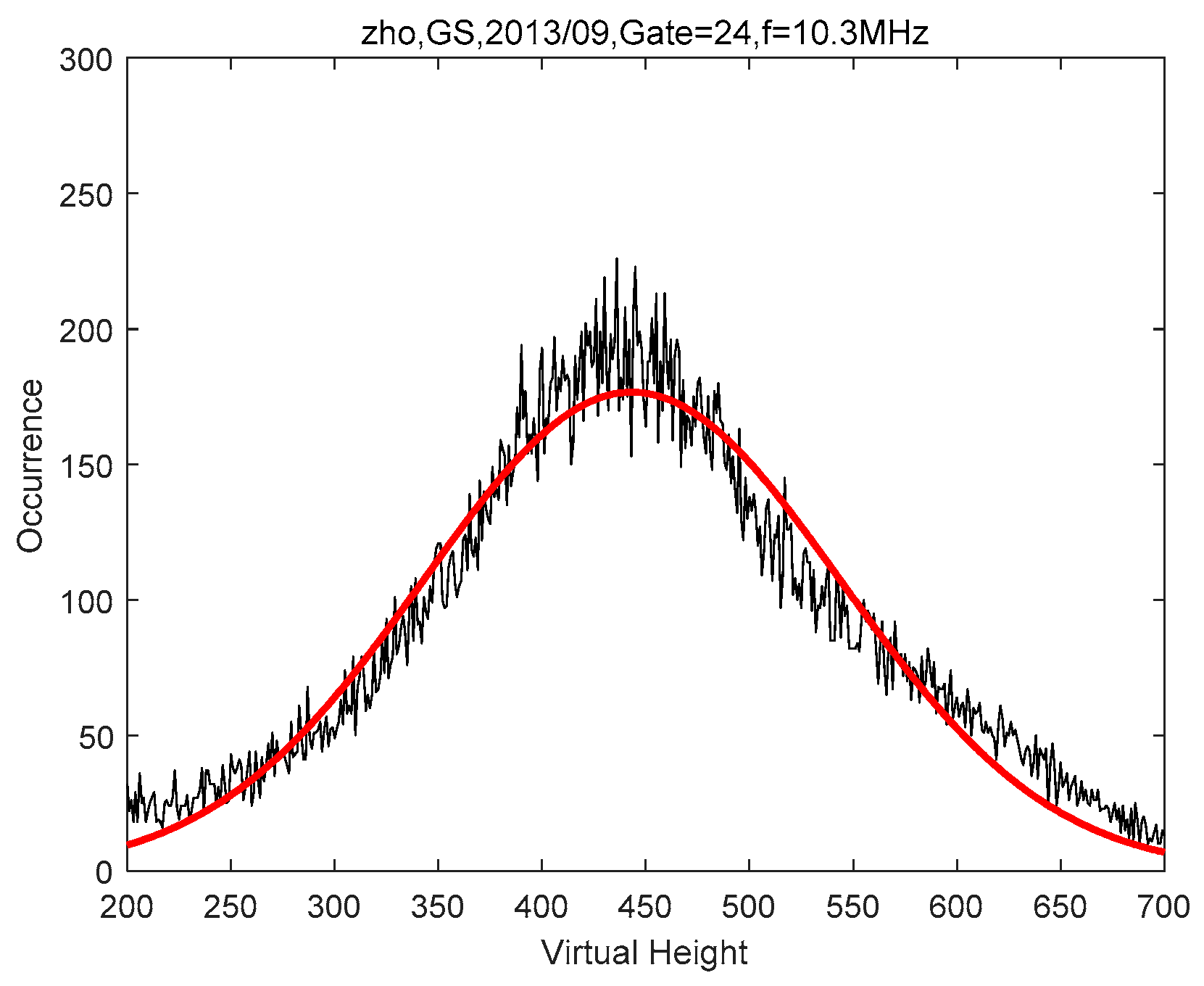
is 0.1 ns) to minimize the RMSE of the peak height on each range gate. The range gate distributions for the ground backscatter echoes of the Zhongshan radar are from 15 to 35. For the elevation distribution of one gate, the corresponding virtual height is close to the Gaussian distribution, as shown in
Figure 3, the peak value of Gaussian fitting is different in different group ranges, and the value of
will be selected when the RMSE of the virtual height under different group ranges tends to be minimum. An example of the ground backscatter of the Zhongshan radar in September 2013 from the methodology to determine
is presented in
Figure 4. The top of
Figure 4a shows the distribution of the group range–elevation angle of the original data and the fitting lines according to Equation (10). There is a clear nonlinear relationship between the elevation angle and the group range in the range gate of 15–30 (corresponding to the group range of 810–1485 km). The black dots represent the maximum occurrence in each gate, and the black solid lines show the fitted virtual heights based on these points. At the fixed virtual height, the peak point of the original data cannot match the trend of the fitting curve well, the virtual height distribution of different group ranges is in a large scope, error bars in the bottom of
Figure 4a show the deviations in virtual height for each gate with an overall smaller change compared with the bottom of
Figure 4b, and a significant difference in peak height in the group range between 800 and 1000 km. When determining the calibration factor
, we use intervals of 0.1 ns in the range of −10~10 ns to identify the value of
.
Figure 4b shows the trend of the elevation angle and virtual height of the minimum RMSE with a value of
is −6 ns. The calibrated elevation angle coincides with the standard curve, the fluctuation of the virtual height with the group range is more concentrated, and the overall error bars decrease. According to Equation (11), the RMSE before calibration is 18.38 km while after it is 10.2 km. The calibrated virtual height of the ground backscatter echoes is 520 km. The distribution of the virtual height determined by RMSE shows good results in the calibration.
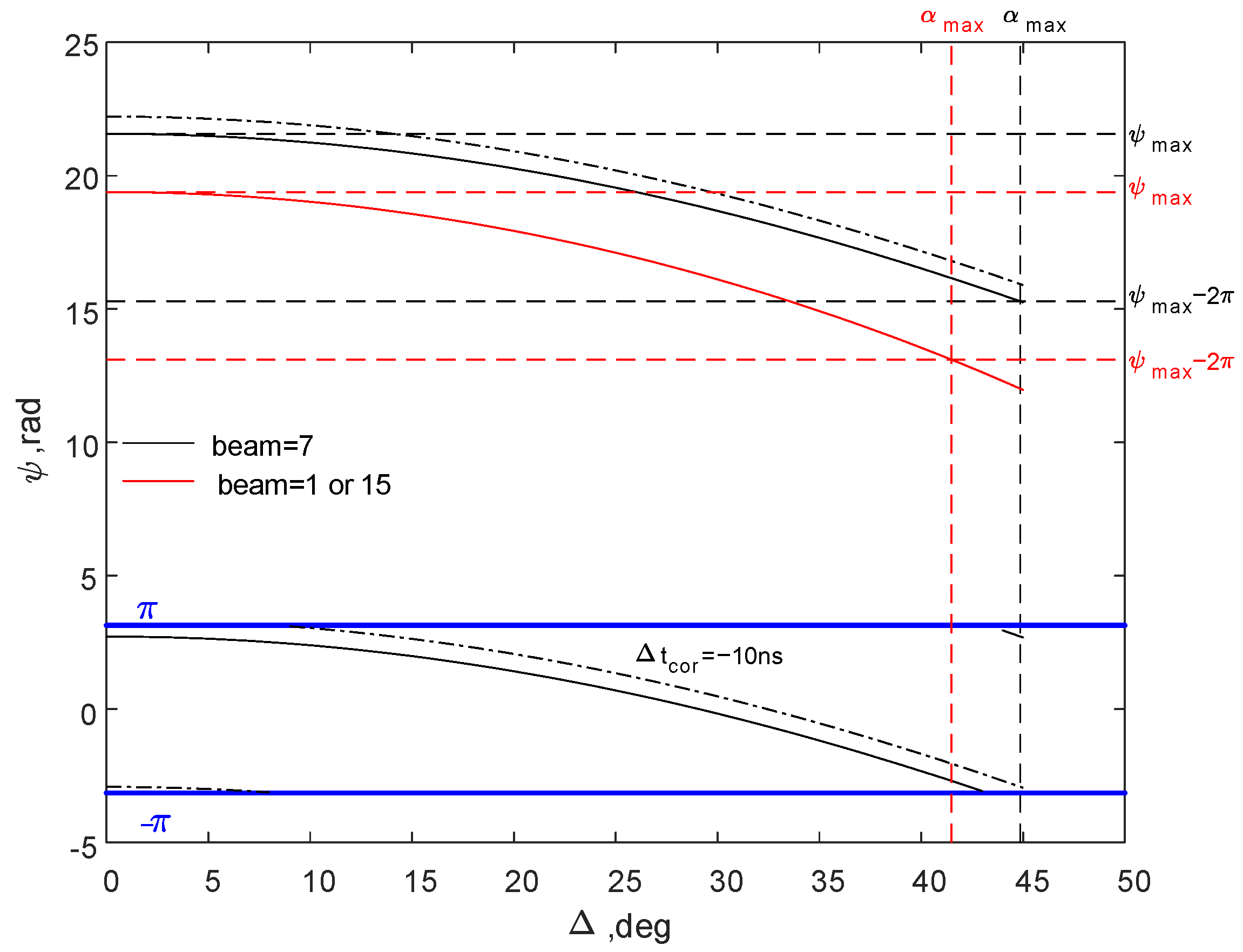
Then, we validate
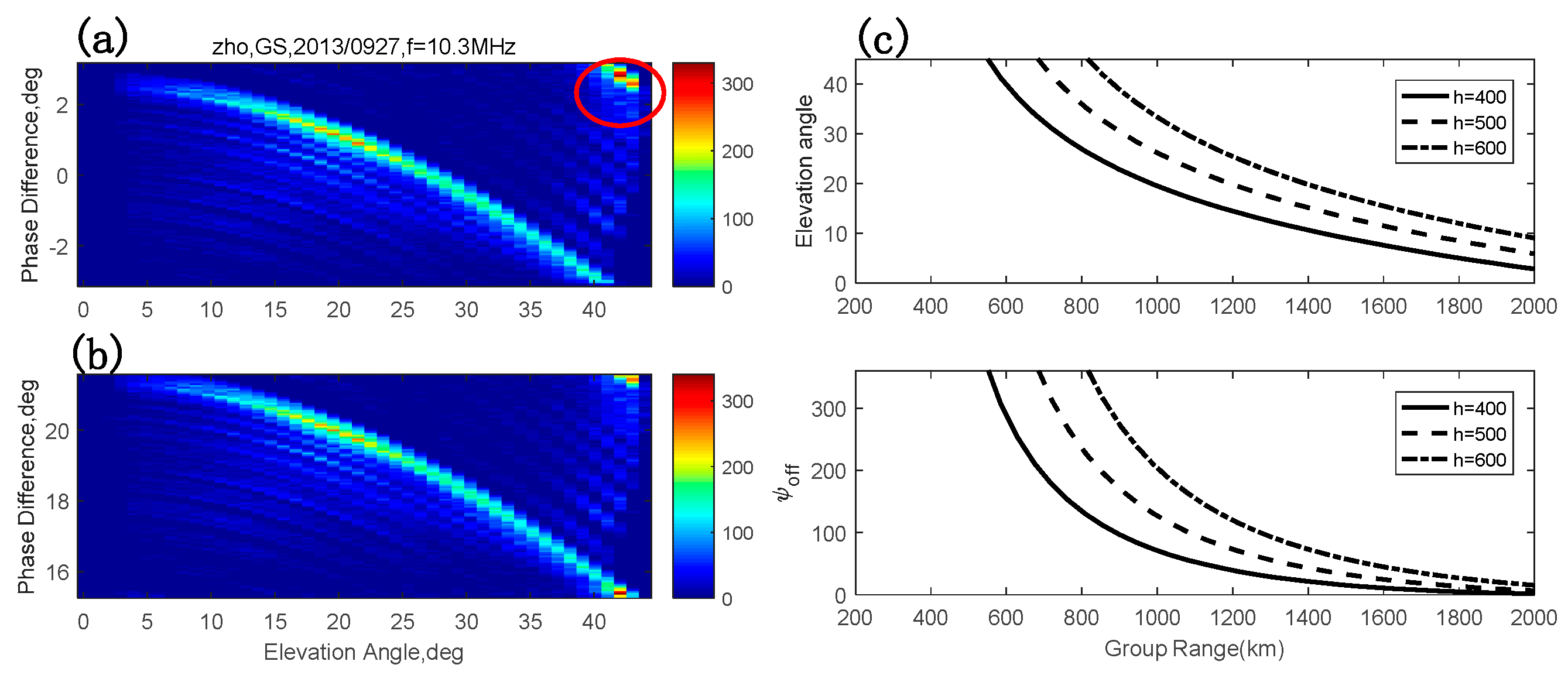
with the phase offset at the specified virtual height. The phase difference in SuperDARN is preprocessed, it is within the phase range of
. However, the real phase difference should be considered with an ambiguous factor and located in
.
Figure 5a shows the relationship between the elevation angle and the phase difference of the radar data. There is a clear nonlinear relationship in the range of elevation of 0–40. A short line in the red circle deviates from the trend of the main curve, which is caused by different ambiguities at the time of the signal received by the radar. By adding ambiguity, the area in the red circle is consistent with the main distribution, as shown in
Figure 5b. The azimuth angle of the echoes received on each beam is different, and this difference in the maximum phase causes a difference in the real phase interval. In the actual calibration process, the offset between the maximum phase and the phase
(phase offset) with the group range is selected as the calibrated data parameter.
There is a nonlinear function relationship between the elevation angle and phase difference from Equations (5) and (6). Therefore, we use the variation of
with the group range to determine
. For echoes of low-angle propagation modes, the expected pattern of
is decreased with the increase in group range until the value approaches zero (
Figure 5c). This is consistent with the study of Ponomarenko (2018) [
1] using E region echoes. Furthermore, the phase offset
of the original data varying with the calibration factor
should approach the theoretical model curve at this virtual height, and the value of
is also close to that obtained in
Figure 4.
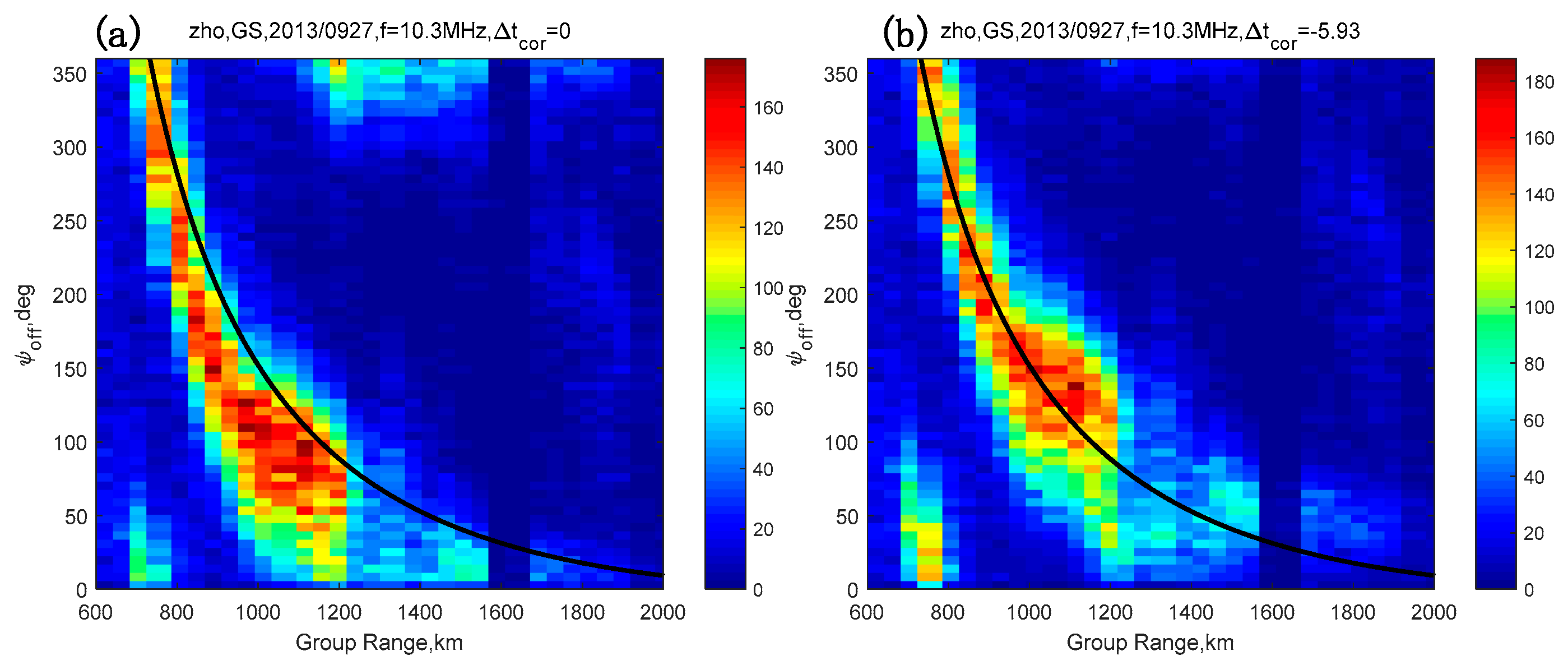
Figure 6 shows the phase offset distribution of the ground echoes at the Zhongshan radar with a group range over 600 km. It can be seen that
decreased with the increase in group range, and the offset between all of the phase differences and the maximum phase was distributed in the range of
. The black solid line is the curve of
when the virtual height is 520 km, as shown in
Figure 6. The calibration factor
of the radar is also determined according to the principle of the minimum RMSE. The
distribution in
Figure 6a deviates significantly from the theoretical curve, especially for “discrete population” in the top of the group range at 1200–1400 km, with a phase deviation of approximately 22°.
Figure 6b shows the distribution of the phase deviation changes with the group ranges with
. The center of the actual distribution is consistent with the theoretical curve.
The data shown in
Figure 6 show that the calibration factor
obtained by the phase offset verification is consistent with the elevation–virtual height model.
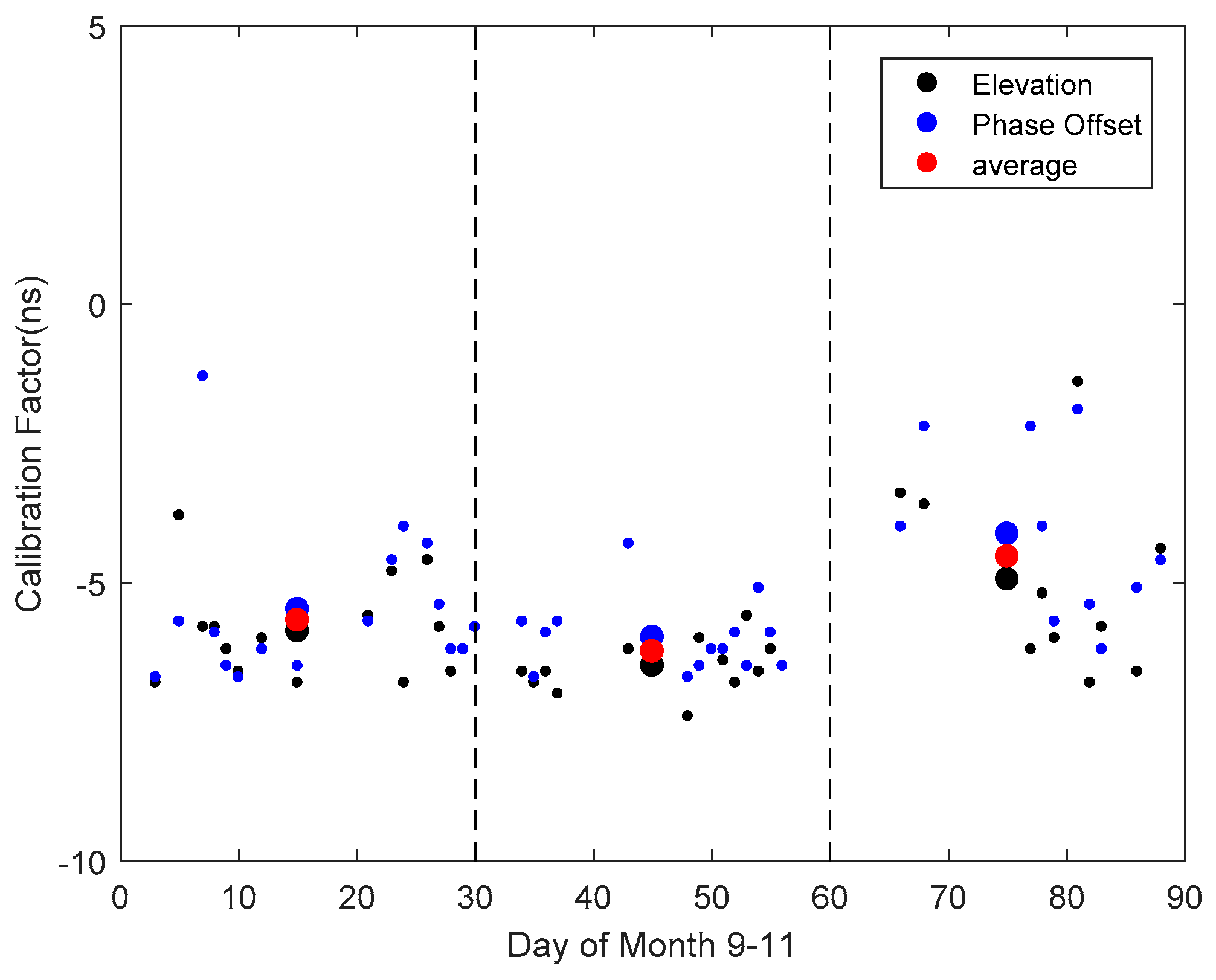
Figure 7 shows the comparison of
determined by the two algorithms from September to November 2013. The black and blue dots are the daily calibration factors obtained by using the elevation angle and the phase offset, respectively. The black and blue solid circles correspond to the monthly mean calibration factors obtained by the daily calibration factors. There are some days with no data, which results in there being not enough ground echoes to calibrate.
is mostly concentrated between −5 and −7 ns, and the estimated values of the difference of two algorithms are generally less than 1 ns. The red solid circle is the mean value of the two methods, which is −5.68 ns, −6.24 ns, and −4.54 ns from September to November, respectively.
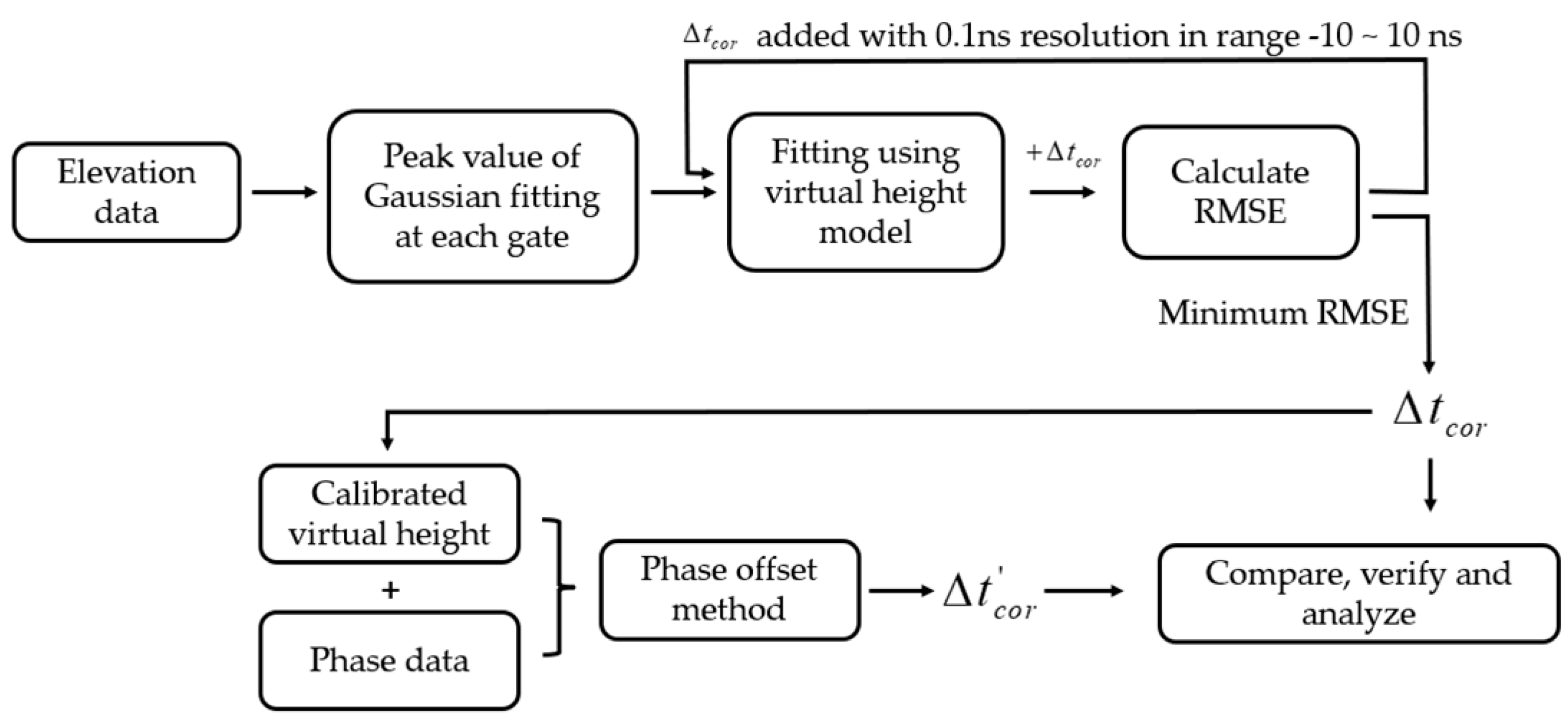
Given all of the information discussed above, the methodology for calibrating the elevation angle can be summarized, as shown in
Figure 8.
4. Discussion
In this paper, the ground backscatter echoes of the Zhongshan radar from 2013 to 2015 are used to calculate the change in
. The operating frequency of the Zhongshan radar is within 10.3 MHz ± 0.1 MHz, so the influence of the frequency for determining
is negligible.
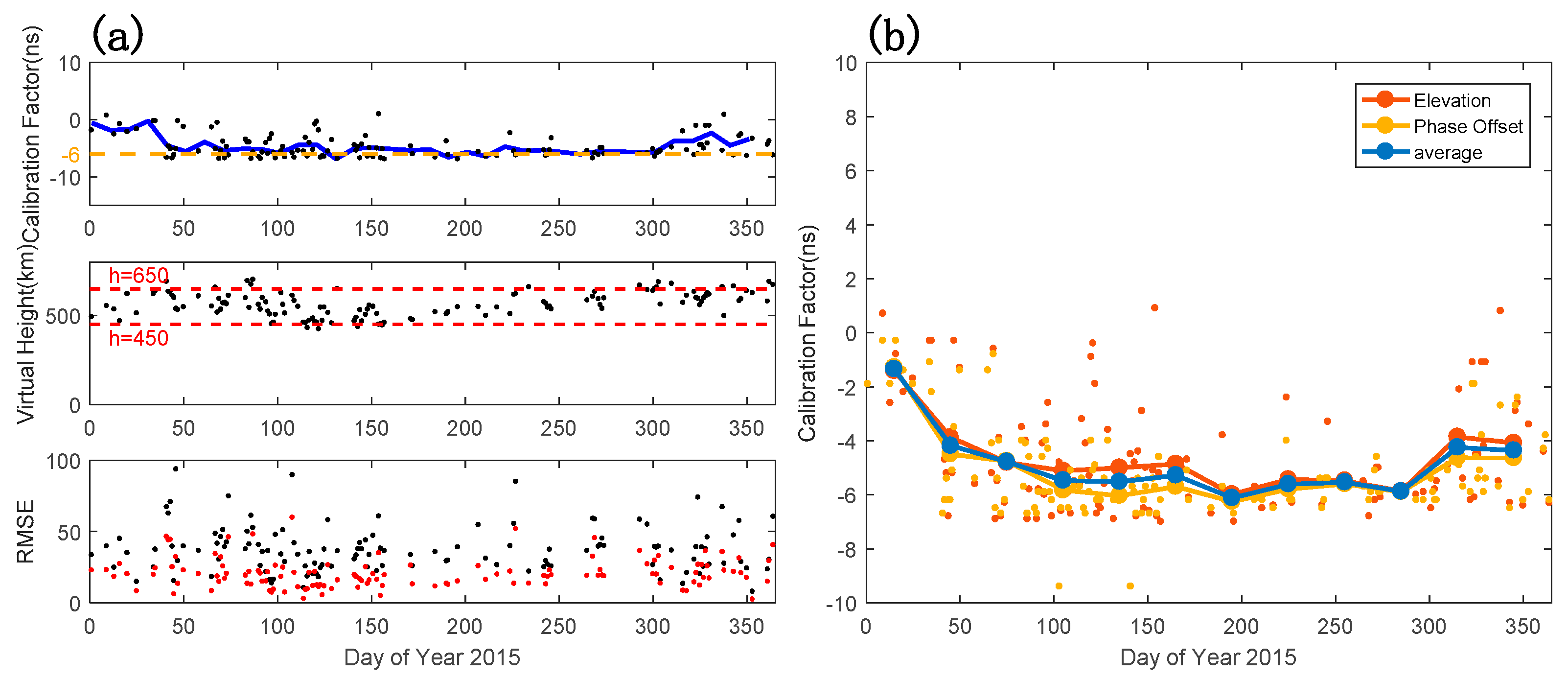
Figure 9 presents the results for 2015 at a daily resolution. The top of
Figure 9a shows the variation in
. The black dots represent the daily
calculated from the elevation data. As can be seen from the panel, the
distribution is relatively stable within a year, with a value concentrated around −6 ns, except for the first two months, which show values around -1 ns. The thick blue line shows a mean value of
at a temporal resolution of 10 days, this highlights the decrease in
around day 50 and slight fluctuations of
in the last two months. There will be a few deviation points, which may be due to the mixture of the echo type. The middle panel represents the change in the calibrated virtual height in one year. The red horizontal line indicates that the virtual height is 450 km and 650 km, and the calibrated virtual heights typically vary in this range. The fluctuation in virtual height shows no seasonal variation. This is because the distribution of the elevation angle is extended in different group ranges. The bottom of
Figure 9a is the RMSE comparison of the virtual height before (black) and after (red) calibration. The RMSE before calibration is nearly double that of after calibration. For further verification, we estimate the average calibration factors using the elevation angle and phase offset.
Figure 9b shows the change in
in 2015. The solid circle represents the values of the monthly average. The red and yellow line represent the
calculated according to the elevation information and the phase verification, respectively. The blue line represents the mean value. The monthly mean value of
shows a sharp decrease between January and February, while the monthly mean of the other months basically varies between −4 to −6 ns, which is consistent with the top of
Figure 9a. The trend of the yellow line is similar to the red line, which verifies the reliability of
.
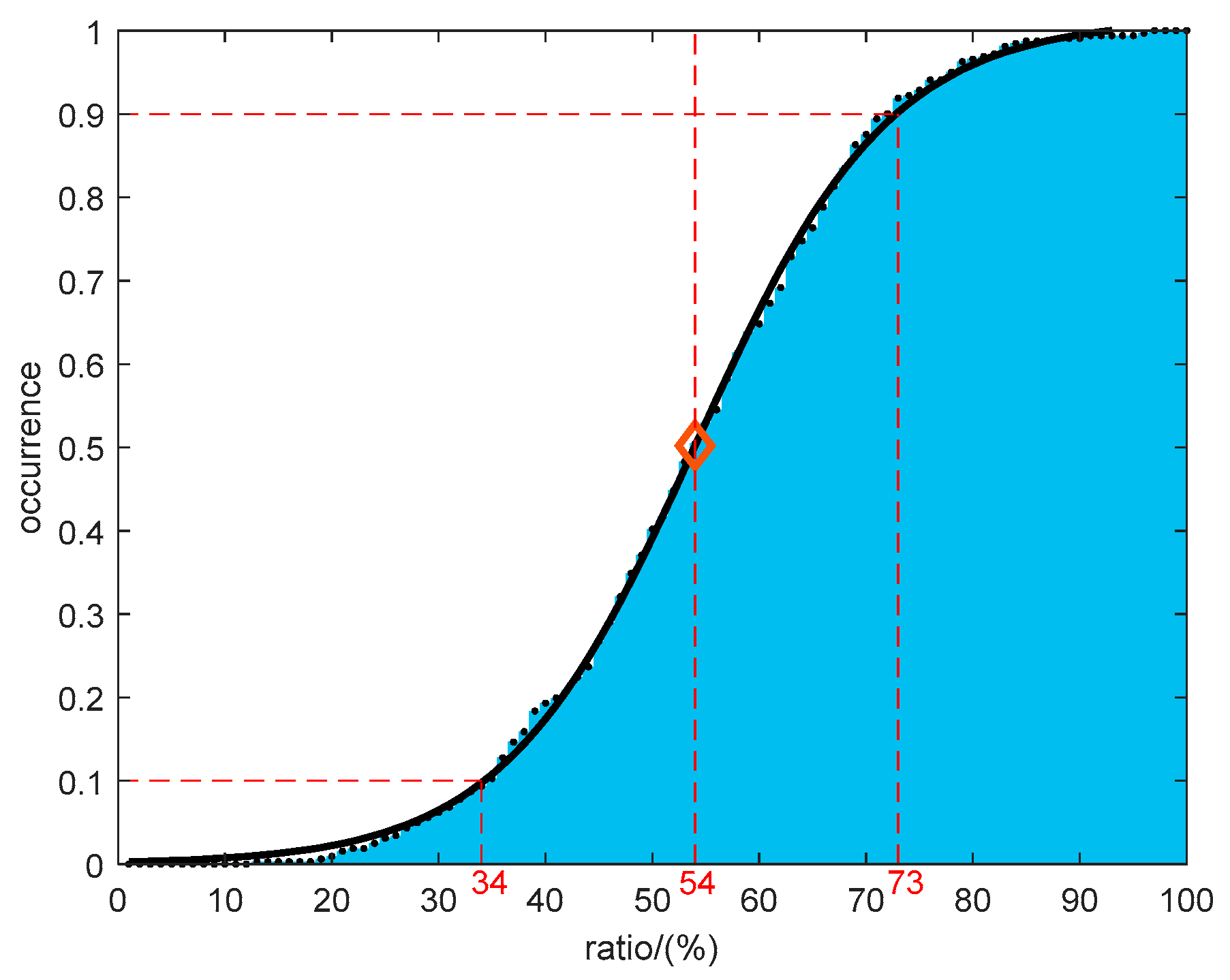
Figure 10 shows the statistical distribution histogram of RMSE before and after calibration for 2013–2015. We calculated the distribution of the RMSE ratio before and after calibration, presenting a probability histogram for each ratio, and used the Logistic algorithm to fit. The results show that the ratio is concentrated between 34% and 73%. The maximum slope represents the peak value of the ratio occurrence. The RMSE of the group range–elevation distribution is mostly reduced to within 54%.
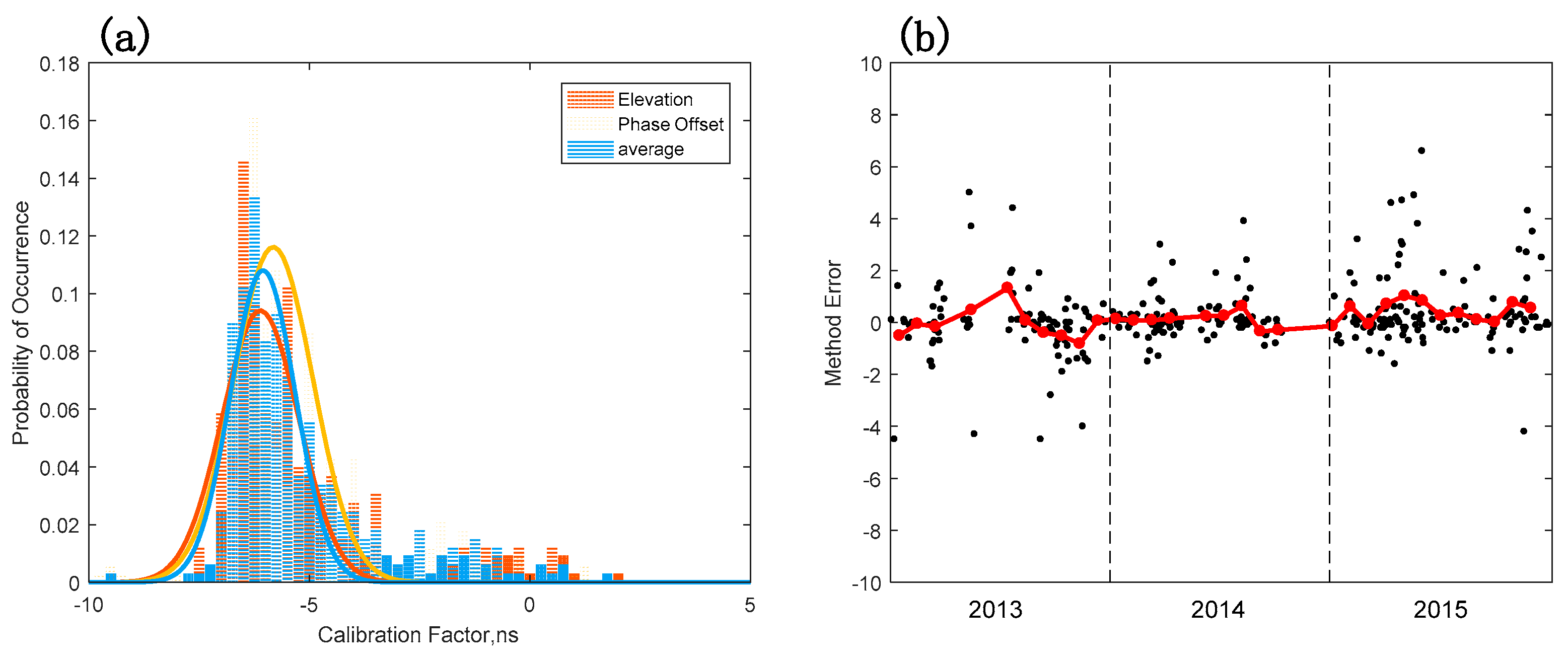
Figure 11a describes the probability distribution of
from 2013 to 2015. The red and yellow histograms represent
estimated by the elevation and phase verification, respectively, most of the values appear between −5 ns and −7 ns, and the two distributions are consistent. The blue histogram represents the change in the mean value. The values of
corresponding to the Gaussian fitting peaks are −6.1 ns (red), −5.8 ns (yellow), and -6.06 ns (blue). The results reflect that the
of the Zhongshan radar is about −6 ns in most conditions. The change in
error calculated between the two algorithms over three years is shown in
Figure 11b. The black dot is the daily
difference change calculated according to the two algorithms, and the data without ground backscatter characteristic curves should be excluded. The estimated
by RMSE and
within three years is maintained within 2 ns, and most of them are less than 1 ns. The thick red line is the monthly average
calculated according to the daily value, which reduces the random noise in the diurnal variation to a certain extent. Monthly statistical results show that the error of the two algorithms is basically less than 1 ns, which proves that the
estimated by RMSE has a good reliability.
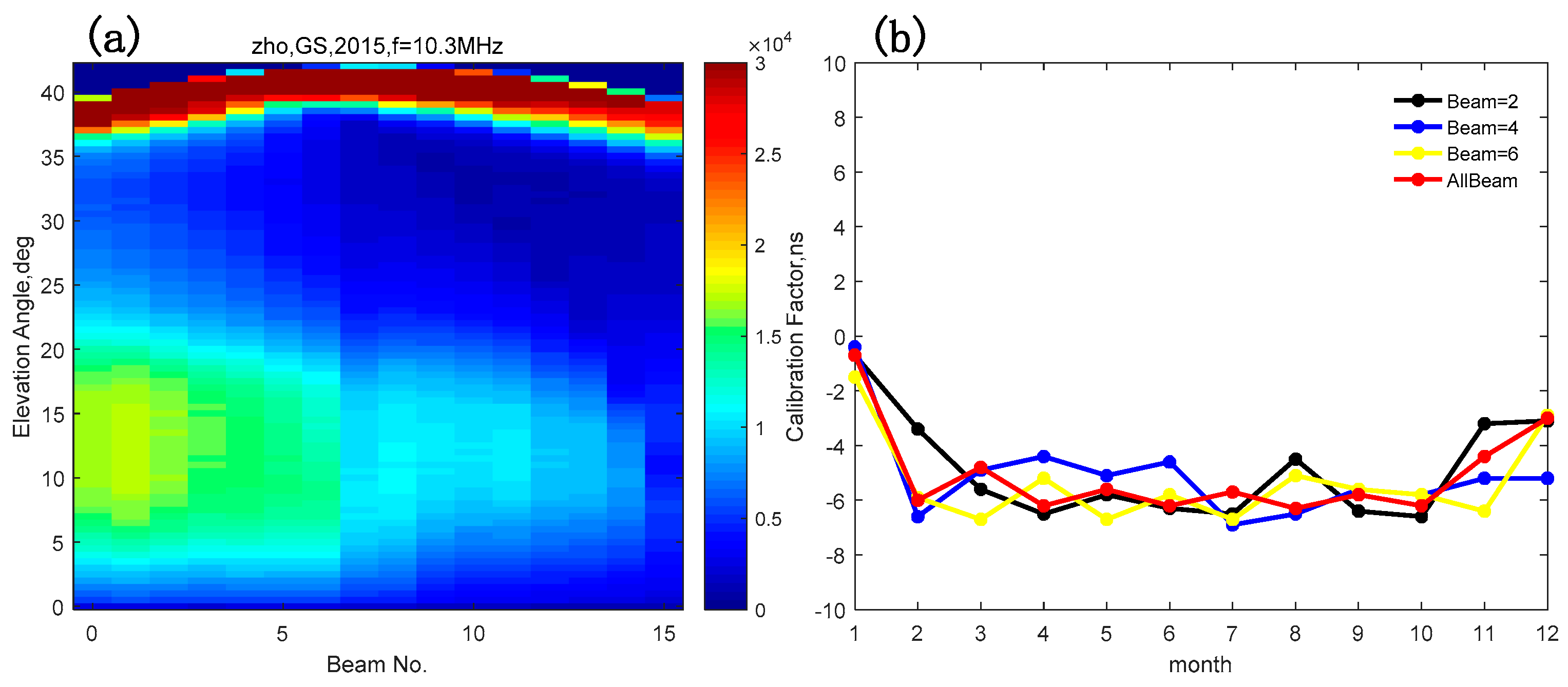
When the Zhongshan radar receives the echoes returned from all directions, it will be equally divided into 16 fan-shaped echo receiving areas in the sweep mode.
Figure 12 shows the elevation distribution measured by each beam at the Zhongshan radar for one month. From the
Figure 12a, there is a high elevation angle curve band, which is the result of the aliased elevation measurements [
14]. For the Zhongshan radar, the number of echoes varies with the beams. Overall, the most elevation angle information is from the beams with small numbers, with an obvious broadband from 5° to 20°, this is due to the coverage for different beams. Although the method discussed above uses data for all beams, we also considered that the values of the calibration factors may change with the beams.
Figure 12b shows the change in
over one year based on monthly statistics for beam 2, 4, 6, and all, respectively. The change in
is smoother than that of the diurnal variation (not shown). The value of
shows the same variation through the year of the diurnal variation, and its value fluctuates around −6 ns and does not change with the beam significantly, except in January, which is consistent with
Figure 8b.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}











