
Versatile Electronics for Microwave Holographic RADAR Based on Software Defined Radio Technology


Abstract
:1. Introduction
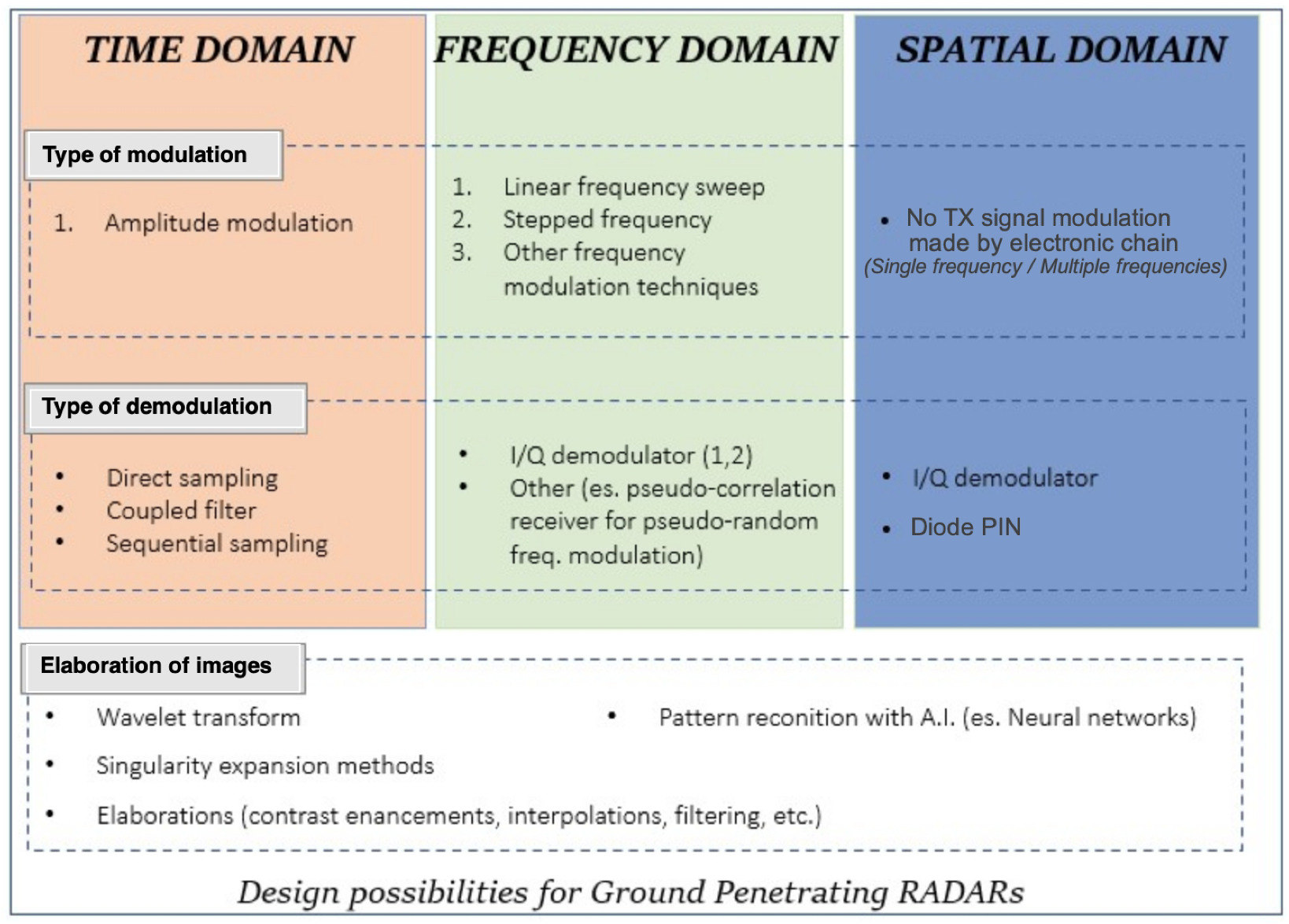
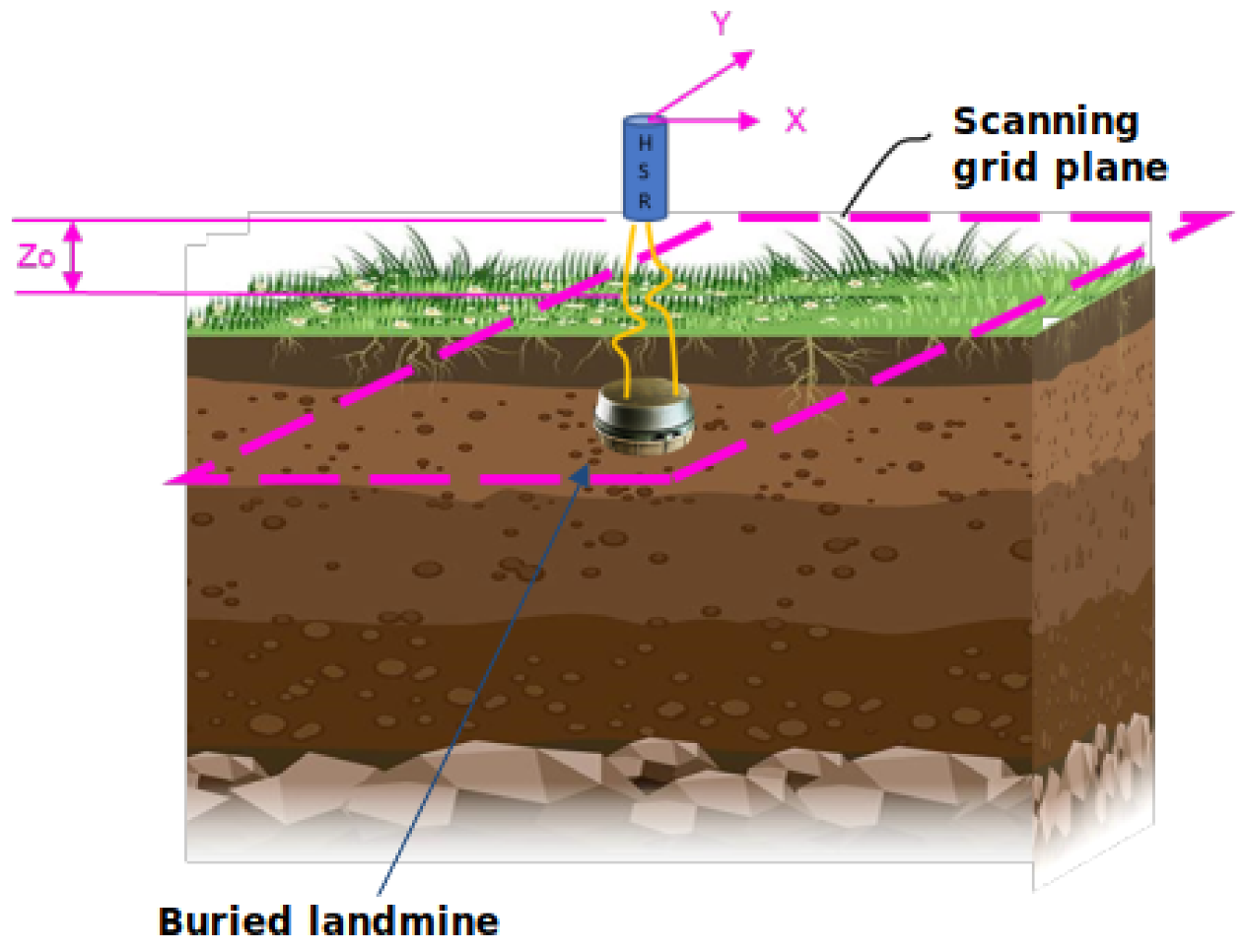
1.1. Microwave Radars for Landmines Detection
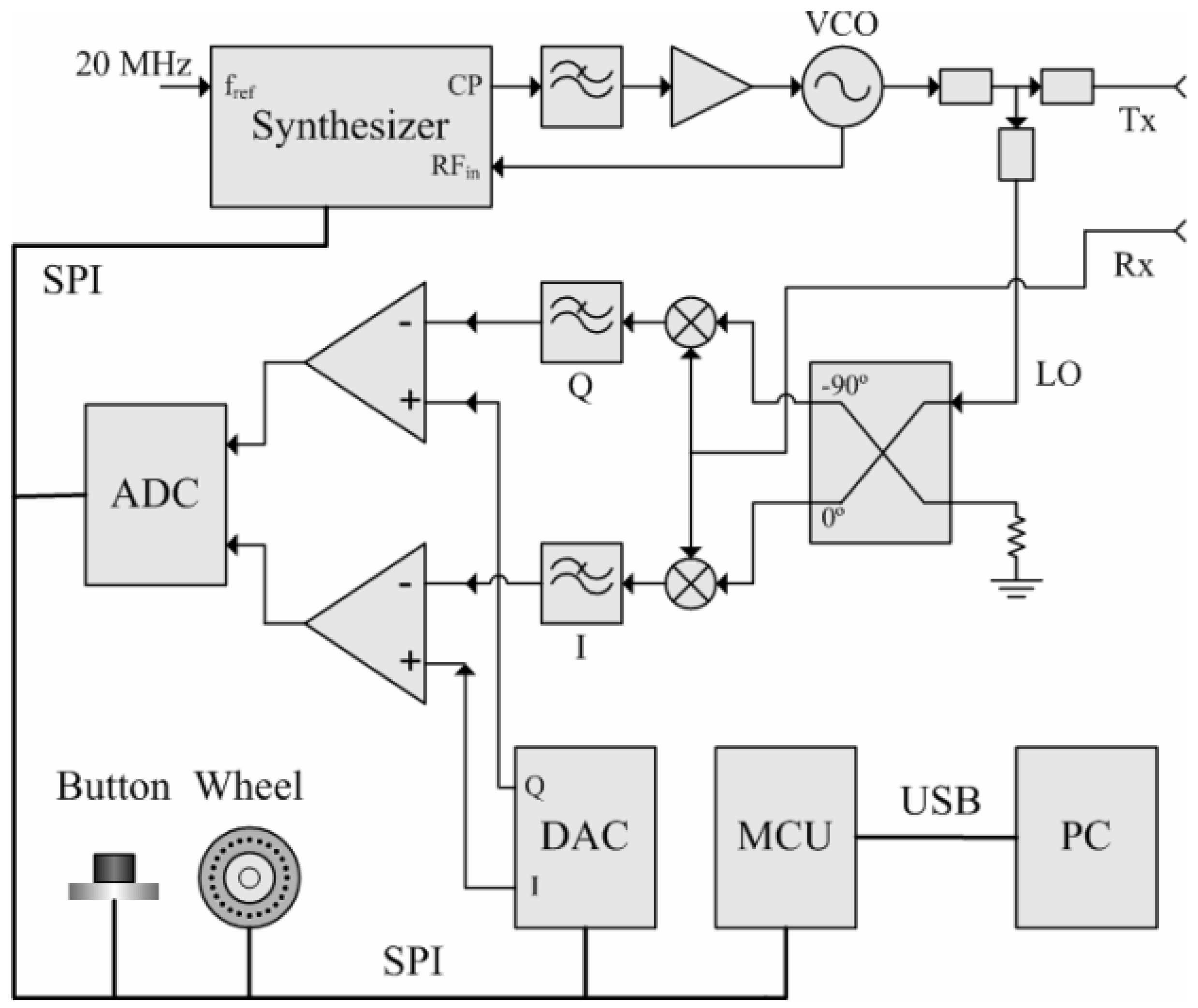
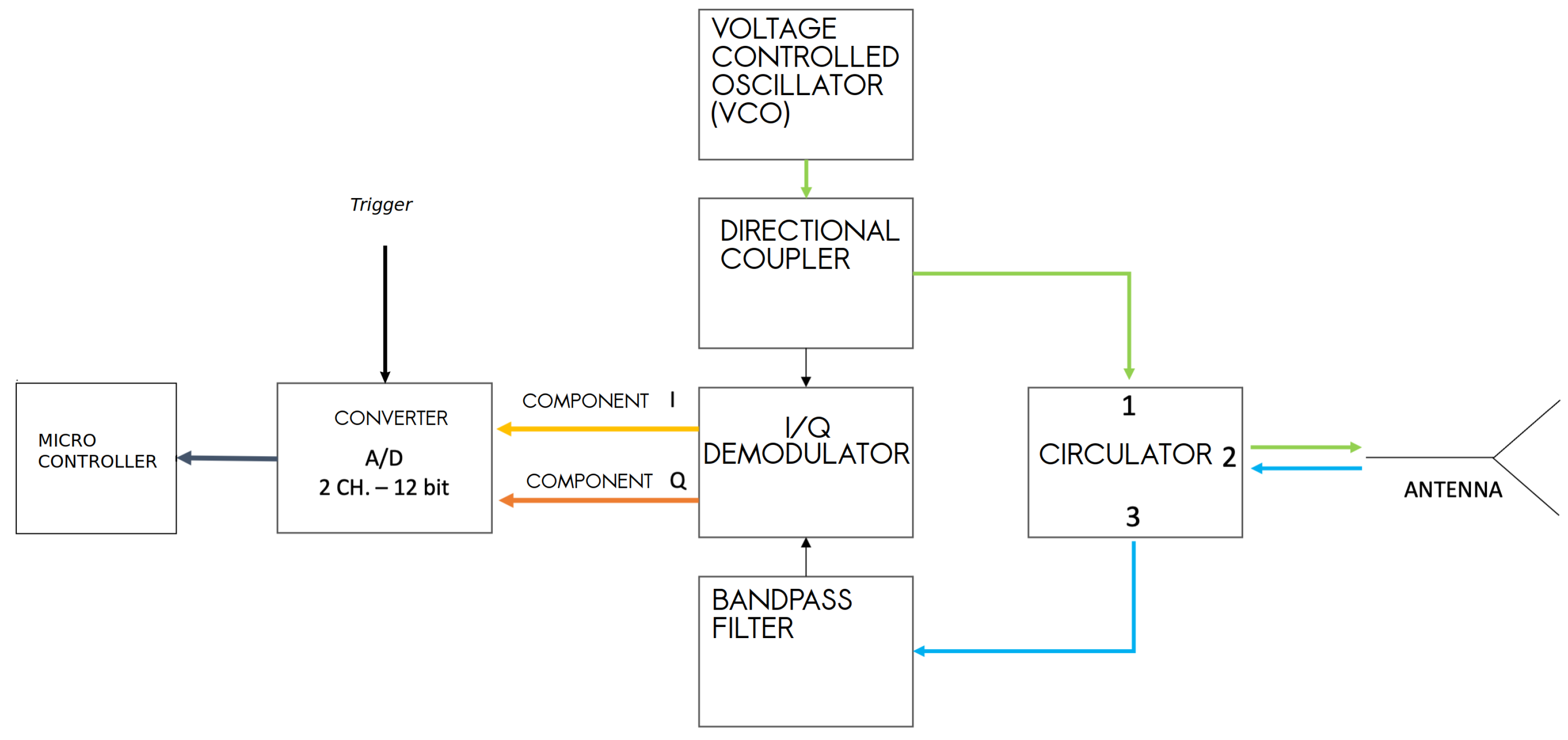
1.2. Recent Advances in Electronics for Holographic Radars
2. Materials and Methods
2.1. Introduction
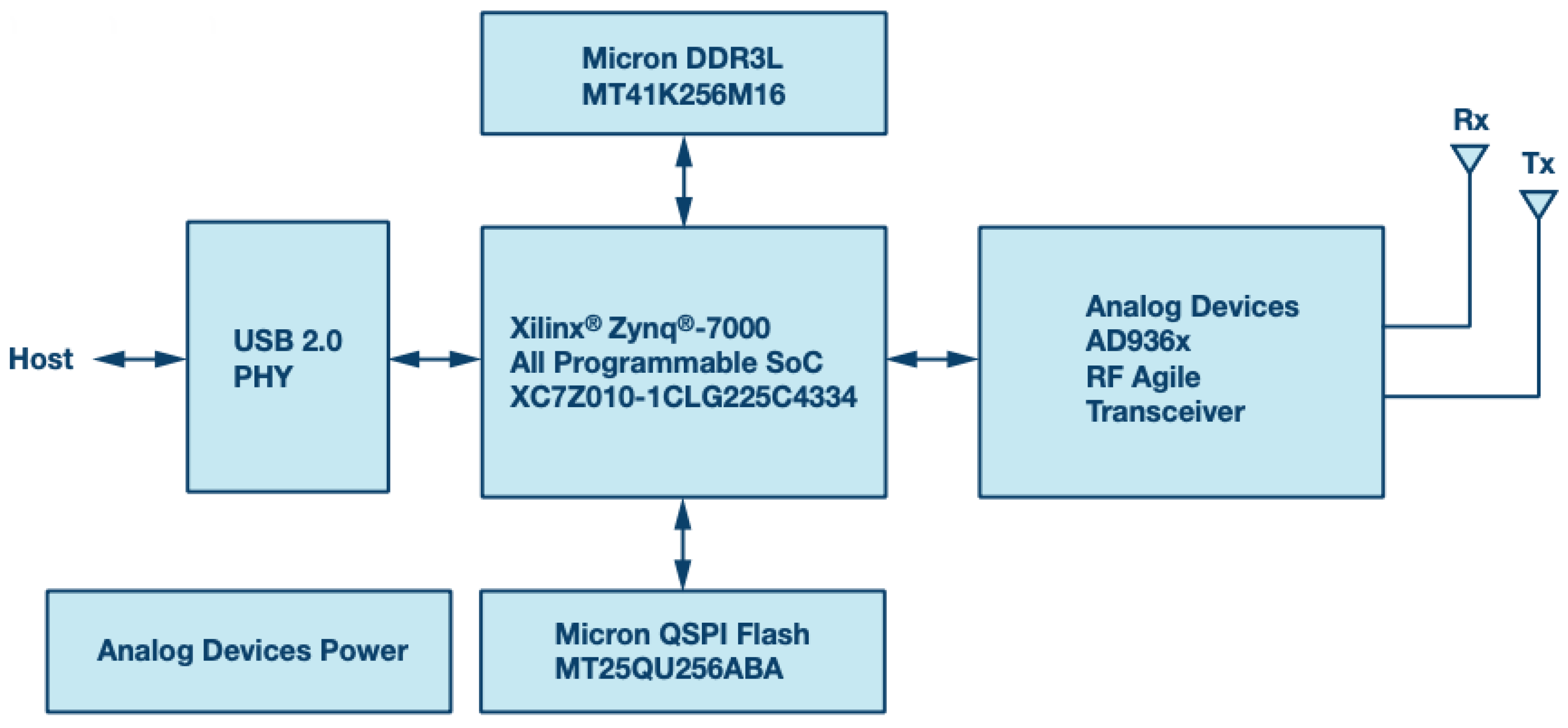
2.2. Analog Devices “ADALM-Pluto”
2.3. The Programming of Adalm Pluto
2.4. The Industrial Input-Output (Iio) Library
- iio _attr: read and write IIO attributes
- iio _info: download IIO attributes
- iio _readdev: read a buffer of an IIO device
- iio _writedev: write a buffer of an IIO device
- iio _reg: read or write SPI or I2C registers in an IIO device (useful for debugging drivers)
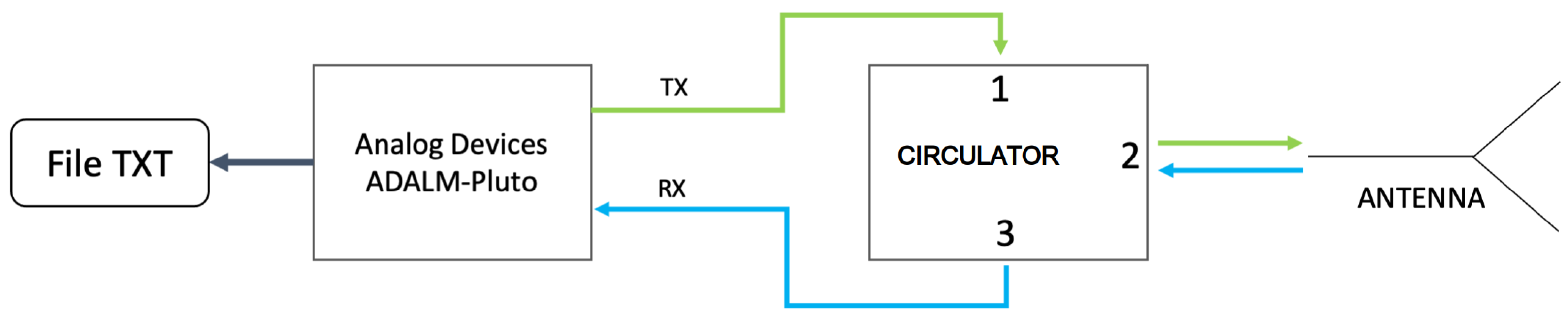
2.5. Radar Control Software
- IP address of the device
- Transmit and receive amplifier gain [dB]
- Carrier frequency [Hz]
- Modulating sinusoid frequency [Hz]
- baseband sampling rate [Hz]
- Input low pass filter cutoff frequency [Hz]
- Parameters related to the internal signal generator
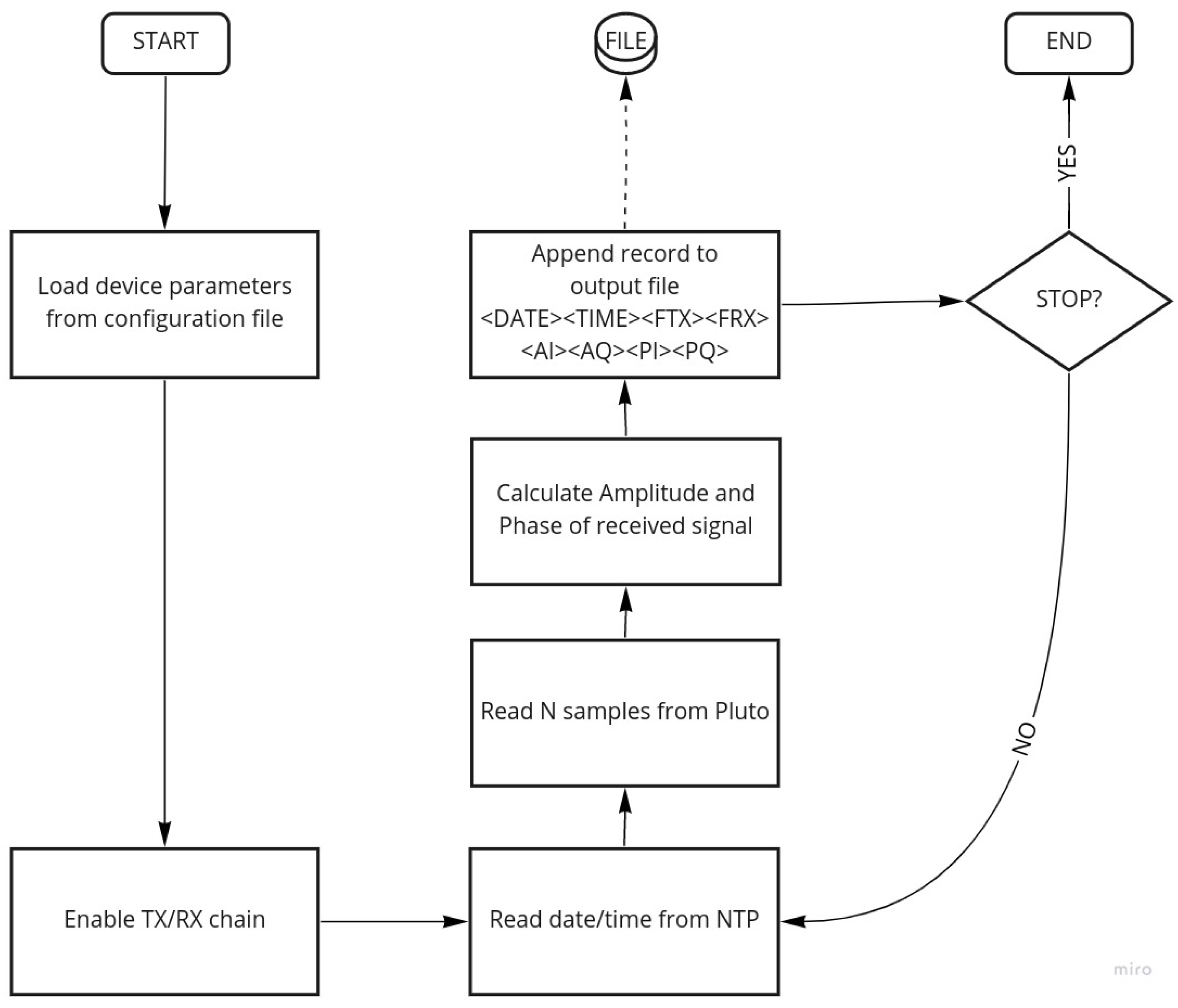
- “start”, start the acquisition
- “stop”, it stops the acquisition and turns off the transmitter and receiver
- “set <VARIABLE> <VALUE>”, set the value of variable in the configuration file
- “view”, shows the configuration parameters
- <DATE>, the date
- <TIME>, time in UTC (Coordinated Universal Time) format
- <FTX>, carrier frequency to the transmitter
- <FRX>, carrier frequency to the receiver
- <AI> <AQ>, amplitude of the I and Q components
- <PI>, <PQ> phase of components I and Q
3. Results
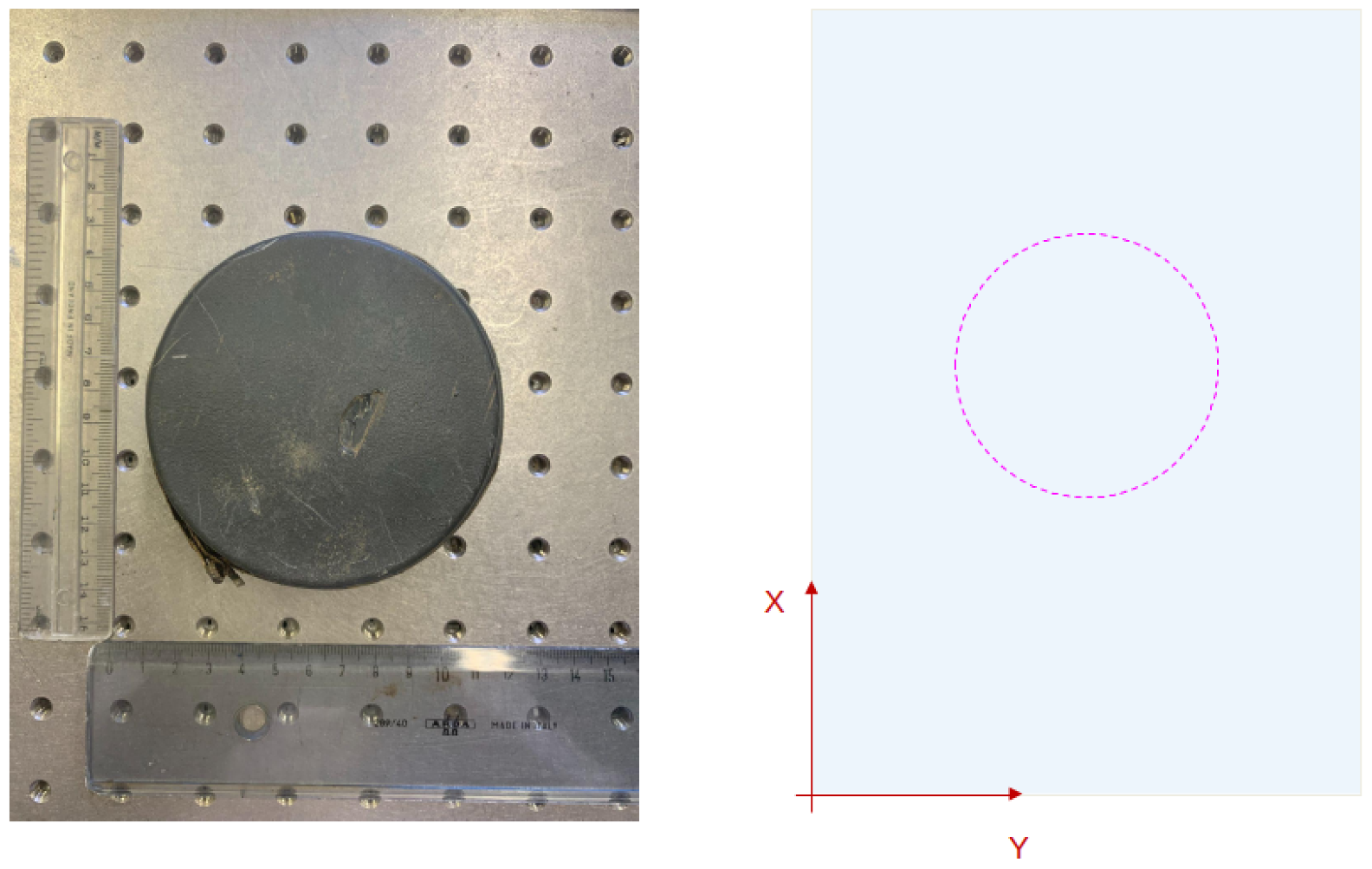
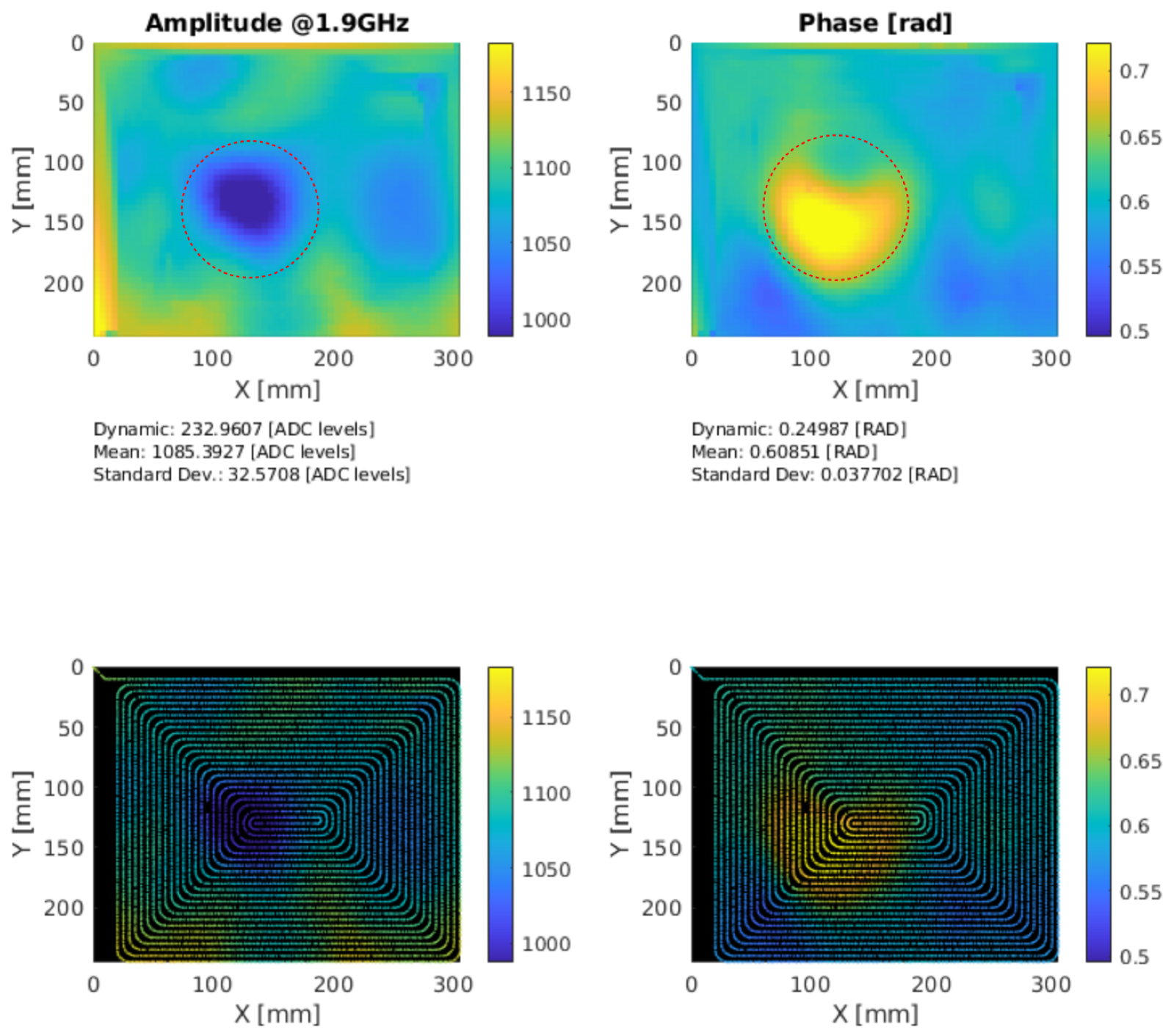
3.1. Description of Experimental Results
3.2. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| DOAJ | Directory of open access journals |
| RADAR | Radio Detection And Ranging |
| HSR | Holographic Sub-surface RADAR |
| GPR | Ground Penetrating RADAR |
| UWB | Ultra Wide Band |
| NATO | North Atlantic Threaty Organization |
| ERW | Explosive Remnants of War |
| IED | Improvised Explosive Devices |
| UXO | UneXploded Devices |
| SoC | System On a Chip |
| SDR | Software Defined Radio |
| NTP | Network Time Protocol |
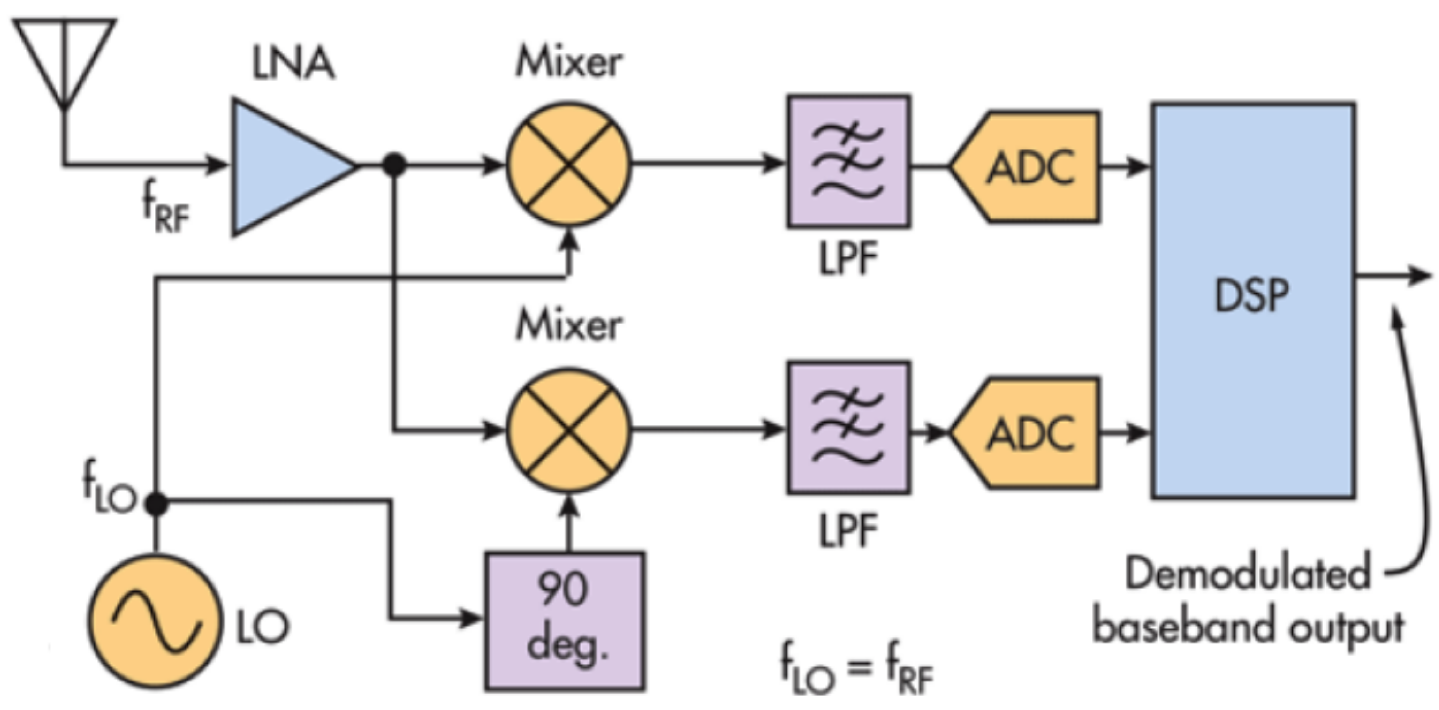
| I/Q | Componenti in fase (I) e quadratura (Q) di un segnale |
| CW | Continuos Wave |
| FPGA | Field Programmable Gate Array |
| RAM | Random Access Memory |
| USB | Universal Serial Bus |
| CPU | Central Processing Unit |
| LNA | Low Noise Amplifier |
| DDS | Direct Digital Synthesis |
| VCO | Voltage Controlled Oscillator |
| ADC | Analog to Digital Converter |
| DAC | Digital to Analog Converter |
References
- Landmine and Cluster Munition Monitor | Monitor. Available online: http://www.the-monitor.org/en-gb/home.aspx (accessed on 11 September 2022).
- Ursign Hofmann (GICHD); Olaf Juergensen (UNDP). Leaving No One Behind: Mine Action and the Sustainable Development Goals; Geneva International Centre for Humanitarian Demining (GICHD)—United Nations Development Programme (UNDP): Geneva, Switzerland, 2017. [Google Scholar]
- Capineri, L.; Pochanin, G.; Bechtel, T.; Lande, T.S.; Capan, I.; Pastuovic, Z.; Ohshima, T.; Coutinho, J.; Snoj, L.; Palucci, A.; et al. NATO Advanced Research Workshop on Explosives Detection. In Explosives Detection; Capineri, L., Turmuş, E.K., Eds.; NATO Science for Peace and Security Series B: Physics and Biophysics; Springer: Dordrecht, The Netherlands, 2019; pp. 1–32. [Google Scholar] [CrossRef]
- Pochanin, G.; Capineri, L.; Bechtel, T.; Ruban, V.; Falorni, P.; Crawford, F.; Ogurtsova, T.; Bossi, L. Radar Systems for Landmine Detection: Invited Paper. In Proceedings of the 2020 IEEE Ukrainian Microwave Week (UkrMW), Kharkiv, Ukraine, 22–27 June 2020; pp. 1118–1122. [Google Scholar] [CrossRef]
- Cardona, L.; Jiménez, J.; Vanegas, N. Landmine Detection Technologies to Face the Demining Problem in Antioquia. DYNA 2014, 81, 115. [Google Scholar] [CrossRef]
- Furuta, K.; Ishikawa, J. (Eds.) Anti-Personnel Landmine Detection for Humanitarian Demining: The Current Situation and Future Direction for Japanese Research and Development; OCLC: ocn315067154; Springer: New York, NY, USA; London, UK, 2009. [Google Scholar]
- Ivashov, S. Wide-span systems of mine detection. In Proceedings of the Second International Conference on Detection of Abandoned Land Mines, Edinburgh, UK, 12–14 October 1998; Volume 1998, pp. 78–80. [Google Scholar] [CrossRef]
- Daniels, D.J.; Daniels, D.J.; Institution of Electrical Engineers (Eds.) Ground Penetrating Radar, 2nd ed.; Number 15 in IEE Radar, Sonar, Navigation, and Avionics Series; OCLC: ocm56442546; Institution of Electrical Engineers: London, UK, 2004. [Google Scholar]
- Borgioli, G.; Bossi, L.; Capineri, L.; Falorni, P.; Bechtel, T.; Crawford, F.; Inagaki, M.; Pochanin, G.; Ruban, V.; Varyanitza-Roschupkina, L.; et al. A Hologram Reconstruction Algorithm for Landmine Recognition and Classification Based on Microwave Holographic Radar Data. In Proceedings of the 2018 Progress in Electromagnetics Research Symposium (PIERS-Toyama), Toyama, Japan, 1–4 August 2018; pp. 1938–1944. [Google Scholar] [CrossRef]
- Sato, M. Dual Sensor ALIS for Humanitarian Demining and its Evaluation Test in Mine Fields in Croatia. In Proceedings of the IGARSS 2008-2008 IEEE International Geoscience and Remote Sensing Symposium, Boston, MA, USA, 6–11 July 2008; pp. II-181–II-184. [Google Scholar] [CrossRef]
- Iizuka, K. Microwave hologram by photoengraving. Proc. IEEE 1969, 57, 813–814. [Google Scholar] [CrossRef]
- Iizuka, K.; Gregoris, L.G. Application of Microwave Holography in the Study of the Field from a Radiating Source. Appl. Phys. Lett. 1970, 17, 509–512. [Google Scholar] [CrossRef]
- Ivashov, S.I.; Razevig, V.V.; Vasiliev, I.A.; Zhuravlev, A.V.; Bechtel, T.D.; Capineri, L. Holographic Subsurface Radar of RASCAN Type: Development and Applications. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2011, 4, 763–778. [Google Scholar] [CrossRef]
- Sahli, H.; Bottoms, A.M.; Cornelis, J.; EUDEM2 (Project); Society for Counter Ordnance Technology; Vrije Universiteit Brussel (Eds.) EUDEM2-SCOT, 2003, Proceedings of the International Conference on Requirements and Technologies for the Detection, Removal and Neutralization of Landmines and UXO, Brussels, Blegium, 15–18 September 2003; OCLC: 500237233; Vrije Universiteit Brussel: Brussels, Blegium, 2003. [Google Scholar]
- Capineri, L.; Arezzini, I.; Calzolai, M.; Windsor, C.G.; Inagaki, M.; Bechtel, T.D.; Ivashov, S.I. High Resolution Imaging with a Holographic Radar Mounted on a Robotic Scanner. In Proceedings of the Electromagnetics Research Symposium Proceedings, Stockholm, Sweden, 12–15 August 2013. [Google Scholar]
- Song, X.J.; Su, Y.; Huang, C.L.; Lu, M.; Zhu, S.P. Landmine detection with holographic radar. In Proceedings of the 2016 16th International Conference on Ground Penetrating Radar (GPR), Hong Kong, China, 13–16 June 2016; pp. 1–4. [Google Scholar] [CrossRef]
- Bossi, L.; Falorni, P.; Priori, S.; Olmi, R.; Capineri, L. Numerical Design and Experimental Validation of a Plastic 3D-Printed Waveguide Antenna for Shallow Object Microwave Imaging. Sens. Imaging 2021, 22, 22. [Google Scholar] [CrossRef]
- Bechtel, T.; Truskavetsky, S.; Capineri, L.; Pochanin, G.; Simic, N.; Viatkin, K.; Sherstyuk, A.; Byndych, T.; Falorni, P.; Bulletti, A.; et al. A survey of electromagnetic characteristics of soils in the Donbass region (Ukraine) for evaluation of the applicability of GPR and MD for landmine detection. In Proceedings of the 2016 16th International Conference on Ground Penetrating Radar (GPR), Hong Kong, China, 13–16 June 2016; pp. 1–6. [Google Scholar] [CrossRef]
- DEMINING ROBOTS. Available online: http://www.natospsdeminingrobots.com (accessed on 11 September 2022).
- Bossi, L.; Falorni, P.; Pochanin, G.; Bechtel, T.; Sinton, J.; Crawford, F.; Ogurtsova, T.; Ruban, V.; Capineri, L. Design of a robotic platform for landmine detection based on Industry 4.0 paradigm with data sensors integration. In Proceedings of the 2020 IEEE International Workshop on Metrology for Industry 4.0 & IoT, Roma, Italy, 3–5 June 2020; pp. 16–20. [Google Scholar] [CrossRef]
- Bechtel, T.; Gennadiy, P.; Vadym, R.; Tetiana, O.; Orlenko, O.; Pochanina, I.; Kholod, P.; Lorenzo, C.; Pierluigi, F.; Bulletti, A.; et al. Application of the Industry 4.0 paradigm to the design of a dual GPR system for Humanitarian Demining. FASTTIMES 2019, 24, 112–120. [Google Scholar]
- Bossi, L.; Falorni, P.; Capineri, L. Performance comparison for the detection of defects in thermal insulating materials using microwave holograms acquired manually and with a robotized scanner. J. Electromagn. Waves Appl. 2019, 33, 2081–2095. [Google Scholar] [CrossRef]
- Capineri, L.; Zandonai, F.; Inagaki, M.; Razevig, V.; Ivashov, S.; Windsor, C.; Bechtel, T. RASCAN holographic radar for detecting and characterizing dinosaur tracks. In Proceedings of the 2013 7th International Workshop on Advanced Ground Penetrating Radar, Nantes, France, 2–5 July 2013; pp. 1–6. [Google Scholar] [CrossRef]
- Amineh, R.K.; Ravan, M.; Sharma, R.; Baua, S. Three-Dimensional Holographic Imaging Using Single Frequency Microwave Data. Int. J. Antennas Propag. 2018, 2018, 6542518. [Google Scholar] [CrossRef]
- Sheen, D.; McMakin, D.; Hall, T. Three-dimensional millimeter-wave imaging for concealed weapon detection. IEEE Trans. Microw. Theory Tech. 2001, 49, 1581–1592. [Google Scholar] [CrossRef]
- Amineh, R.K.; Ravan, M.; Khalatpour, A.; Nikolova, N.K. Three-Dimensional Near-Field Microwave Holography Using Reflected and Transmitted Signals. IEEE Trans. Antennas Propag. 2011, 59, 4777–4789. [Google Scholar] [CrossRef]
- Ravan, M.; Amineh, R.K.; Nikolova, N.K. Two-dimensional near-field microwave holography. Inverse Probl. 2010, 26, 055011. [Google Scholar] [CrossRef]
- Collins, T.F.; Getz, R.; Pu, D.; Wyglinski, A.M. Software-Defined Radio for Engineers; Artech House Mobile Communications Series; Artech House: Norwood, MA, USA, 2018. [Google Scholar]
- Bretthorst, G.L. Bayesian Spectrum Analysis and Parameter Estimation; OCLC: 1159219355; Springer International Publishing: Berlin/Heidelberg, Germany, 1988. [Google Scholar]
- Bossi, L. A Novel Microwave Imaging RADAR for Anti-Personnel Landmine Detection and Its Integration on a Multi-Sensor Robotic Scanner; FLORE Università degli Studi di Firenze: Firenze, Italy, 2022. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Main Specifications | Typical |
|---|---|
| DC Input | 4.5 V to 5.5 V |
| ADC and DAC sample rate | 65.2 kSPS to 61.44 MSPS |
| ADC and DAC resolution | 12 bit |
| Tuning range | 325 MHz up to 6 GHz |
| TX power output | 7 dBm |
| Interface and power | USB 2.0 |
| FPGA logic cells | 28k |
| DSP slices | 80 |
| Dimensions | 117 mm × 79 mm × 24 mm |
| Weight | 114 g |
| Parameter | Value |
|---|---|
| Carrier frequency | 1.9 GHz |
| Frequency of the modulating tone | 100 kHz |
| Power at the antenna input | 9.5 dBm |
| Attenuation on the TX chain | −3 dB |
| Gain on the RX chain | 10 dB |
| TX and RX bandwidth filter settings | 200 kHz |
| Baseband sampling rate | 2.1 MHz |
| Number of acquired cycles () | 64 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bossi, L.; Falorni, P.; Capineri, L. Versatile Electronics for Microwave Holographic RADAR Based on Software Defined Radio Technology. Electronics 2022, 11, 2883. https://doi.org/10.3390/electronics11182883
Bossi L, Falorni P, Capineri L. Versatile Electronics for Microwave Holographic RADAR Based on Software Defined Radio Technology. Electronics. 2022; 11(18):2883. https://doi.org/10.3390/electronics11182883
Chicago/Turabian StyleBossi, Luca, Pierluigi Falorni, and Lorenzo Capineri. 2022. "Versatile Electronics for Microwave Holographic RADAR Based on Software Defined Radio Technology" Electronics 11, no. 18: 2883. https://doi.org/10.3390/electronics11182883