
Research on Diesel Engine Fault Diagnosis Method Based on Stacked Sparse Autoencoder and Support Vector Machine

Abstract
:1. Introduction
- The artificial neural network not only needs to rely on a large number of training samples but also has an issue called overfitting or local optimal solution;
- Although the Support Vector Machine resolves the problem of small samples, it still has similar shortcomings to those of the artificial neural network.
- The sensor combination analysis provides a reference for the optimal layout of sensors. In the case of utilizing fewer sensors, higher diagnostic accuracy is obtained, while diagnostic costs are reduced;
- By using the characteristic parameter analysis when fewer sensors are adapted, the representative characteristic parameters of diesel engine fault diagnosis can be effectively extracted, and a better diagnosis effect is obtained.
2. The Basic Principles of the Feature Dimension Reduction and Fault Diagnosis
2.1. The Fundamentals of the SSAE
2.2. The Fundamentals of the SVM
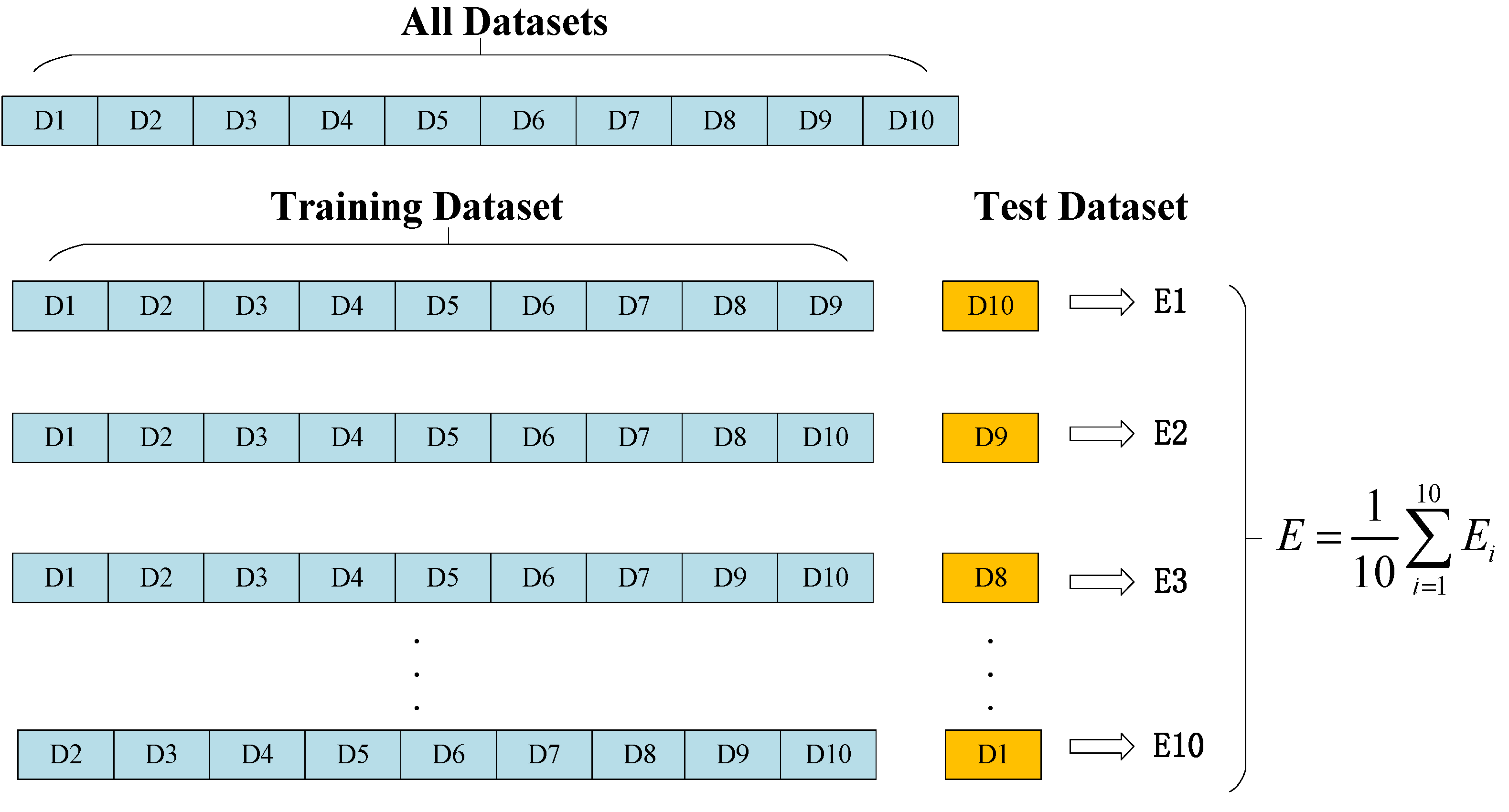
2.3. The Fundamentals of the Grid Search and K-Fold Cross-Validation Optimization
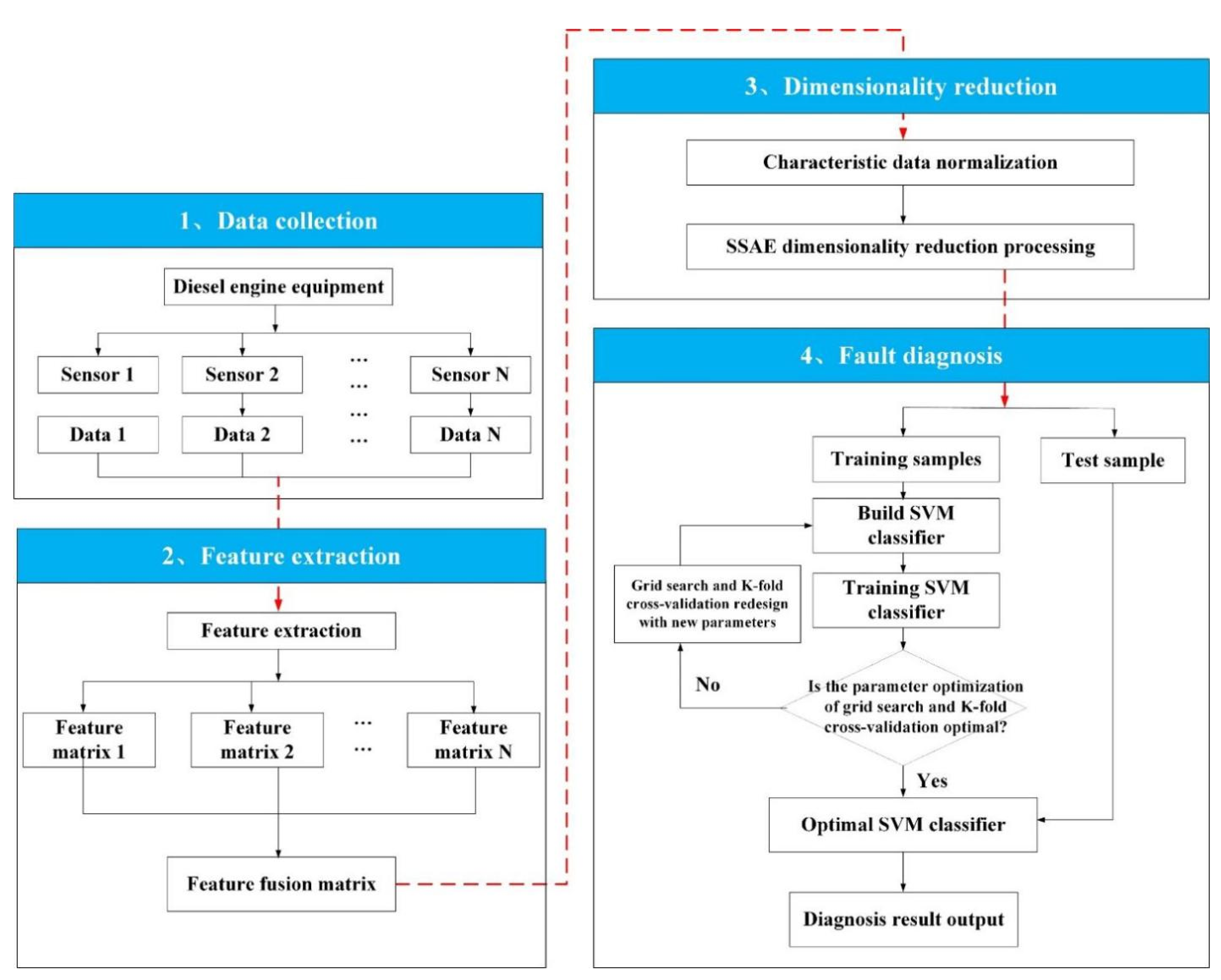
3. The Process Flow of the Fault Diagnosis Method of a Diesel Engine Based on the SSAE-SVM
4. The Verification of the Experiment
4.1. Presetting Experimental Failure Modes
4.2. Presetting the Description of the Fault Test Data
4.3. The Comparative Analysis of the Parameter Characteristics
4.4. The Comparative Analysis of the Dimension Reduction Methods
4.5. The Comparative Analysis of the Sensor Combination
4.6. The Comparative Analysis of the Classification Methods
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Widodo, A.; Yang, B.S. Support vector machine in machine condition monitoring and fault diagnosis. Mech. Syst. Signal Process. 2007, 21, 2560–2574. [Google Scholar] [CrossRef]
- Lei, Y.; He, Z.; Zi, Y. A new approach to intelligent fault diagnosis of rotating machinery. Expert Syst. Appl. 2008, 35, 1593–1600. [Google Scholar] [CrossRef]
- Li, Y.; Tse, P.W.; Yang, X.; Yang, J. EMD-based fault diagnosis for abnormal clearance between contacting components in a diesel engine. Mech. Syst. Signal Process. 2010, 24, 193–210. [Google Scholar] [CrossRef]
- Sen, A.K.; Longwic, R.; Litak, G.; Gorski, K. Analysis of cycle-to-cycle pressure oscillations in a diesel engine. Mech. Syst. Signal Process. 2008, 22, 362–373. [Google Scholar] [CrossRef]
- Song, E.; Ke, Y.; Yao, C.; Dong, Q.; Yang, L. Fault Diagnosis Method for High-Pressure Common Rail Injector Based on IFOA-VMD and Hierarchical Dispersion Entropy. Entropy 2019, 21, 923. [Google Scholar] [CrossRef] [Green Version]
- Bi, X.; Cao, S.; Zhang, D. A Variety of Engine Faults Detection Based on Optimized Variational Mode Decomposition-Robust Independent Component Analysis and Fuzzy C-Mean Clustering. IEEE Access 2019, 7, 27756–27768. [Google Scholar] [CrossRef]
- Geng, Z.; Chen, J.; Hull, J.B. Analysis of engine vibration and design of an applicable diagnosing approach. Int. J. Mech. Sci. 2003, 45, 1391–1410. [Google Scholar] [CrossRef]
- Taghizadeh-Alisaraei, A.; Mandavian, A. Fault detection of injectors in diesel engines using vibration time-frequency analysis. Appl. Acoust. 2019, 143, 48–58. [Google Scholar] [CrossRef]
- Yazdani, S.; Montazeri-Gh, M. A novel gas turbine fault detection and identification strategy based on hybrid dimensionality reduction and uncertain rule-based fuzzy logic. Comput. Ind. 2020, 115, 103131. [Google Scholar] [CrossRef]
- Hou, L.; Zhang, J.; Du, B. A Fault Diagnosis Model of Marine Diesel Engine Fuel Oil Supply System Using PCA and Optimized SVM[C]//Journal of Physics: Conference Series. IOP Publ. 2020, 1576, 012045. [Google Scholar]
- Shao, M.; Wang, J.; Wang, S. Research on marine diesel engine fault diagnosis based on the manifold learning and ELM[C]//Journal of Physics: Conference Series. IOP Publ. 2020, 1549, 042113. [Google Scholar]
- Hosseinzadeh, J.; Masoodzadeh, F.; Roshandel, E. Fault detection and classification in smart grids using augmented K-NN algorithm. SN Appl. Sci. 2019, 1, 1627. [Google Scholar] [CrossRef] [Green Version]
- Yu, J. Machinery fault diagnosis using joint global and local/nonlocal discriminant analysis with selective ensemble learning. J. Sound Vib. 2016, 382, 340–356. [Google Scholar] [CrossRef]
- Du, Y.; Du, D. Fault detection and diagnosis using empirical mode decomposition based principal component analysis. Comput. Chem. Eng. 2018, 115, 1–21. [Google Scholar] [CrossRef]
- Liu, H.; Zhang, J.; Cheng, Y.; Lu, C. Fault diagnosis of gearbox using empirical mode decomposition and multi-fractal detrended cross-correlation analysis. J. Sound Vib. 2016, 385, 350–371. [Google Scholar] [CrossRef]
- Gu, C.; Qiao, X.; Jin, Y.; Liu, Y. A Novel Fault Diagnosis Method for Diesel Engine Based on MVMD and Band Energy. Shock Vib. 2020, 2020, 8247194. [Google Scholar] [CrossRef]
- Zhao, H.; Zhang, J.; Jiang, Z.; Wei, D.; Zhang, X.; Mao, Z. A New Fault Diagnosis Method for a Diesel Engine Based on an Optimized Vibration Mel Frequency under Multiple Operation Conditions. Sensors 2019, 19, 2590. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cai, C.; Weng, X.; Zhang, C. A novel approach for marine diesel engine fault diagnosis. Clust. Comput. 2017, 20, 1691–1702. [Google Scholar] [CrossRef]
- Chen, K.; Mao, Z.; Zhao, H.; Jiang, Z.; Zhang, J. A variational stacked autoencoder with harmony search optimizer for valve train fault diagnosis of diesel engine. Sensors 2020, 20, 223. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.H.; Yu, L. Application of complete ensemble intrinsic time-scale decomposition and least-square SVM optimized using hybrid DE and PSO to fault diagnosis of diesel engines. Front. Inf. Electron. Eng. (Engl.) 2017, 18, 272–286. [Google Scholar] [CrossRef]
- Khazaee, M.; Banakar, A.; Ghobadian, B.; Mirsalim, M.; Minaei, S.; Jafari, M.; Sharghi, P. Fault detection of engine timing belt based on vibration signals using data-mining techniques and a novel data fusion procedure. Struct. Health Monit. 2016, 15, 583–598. [Google Scholar] [CrossRef]
- Zhong, K.; Han, M.; Qiu, T.; Han, B. Fault Diagnosis of Complex Processes Using Sparse Kernel Local Fisher Discriminant Analysis. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 1581–1591. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Zhao, J.; Zhang, X.; Ni, X.; Li, H.; Sun, F. A novel hybrid compound fault pattern identification method for gearbox based on NIC, MFDFA, and WOASVM. J. Mech. Sci. Technol. 2019, 33, 1097–1113. [Google Scholar] [CrossRef]
- Samuel, P.D.; Pines, D.J. A review of vibration-based techniques for helicopter transmission diagnostics. J. Sound Vib. 2005, 282, 475–508. [Google Scholar] [CrossRef]
- Liu, Z.; Qu, J.; Ming, J.Z. Fault level diagnosis for planetary gearboxes using hybrid kernel feature selection and kernel Fisher discriminant analysis. Int. J. Adv. Manuf. Technol. 2013, 67, 1217–1230. [Google Scholar] [CrossRef]
- Lebold, M.; McClintic, K.; Campbell, R.; Byington, C.; Maynard, K. Review of vibration analysis methods for gearbox diagnostics and prognostics. In Proceedings of the 54th Meeting of the Society for Machinery Failure Prevention Technology, Virginia Beach, VA, USA, 1–4 May 2000; pp. 623–634. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature Classification | Parameter Characteristics |
|---|---|
| Time-domain features | 1 maximum value; 2 minimum; 3 peak-to-peak; 4 mean; 5 mean square; 6 roots mean square; 7 average amplitude; 8 root amplitude; 9 variances; 10 standard deviations; 11 peak; 12 kurtoses; 13 skewness; 14 energy; |
| 15 peak indicators; 16 impulse indicators; 17 waveform indicator; 18 margin indicators; 19 clearance factor | |
| Frequency domain features | 20 frequency mean; 21 frequency center; 22 RMS frequency; 23 frequency standard deviation |
| Wavelet packet energy | Wavelet packet energy features (1–8) |
| Common features | peak-to-peak; mean; mean square; variance; peak; kurtosis (6) |
| All features | Time domain feature parameters (19) Frequency domain feature parameters (4) Wavelet packet energy feature parameters (8) |
| Fault States | Failure Modes |
|---|---|
| 1 | Normal |
| 2 | Insufficient fuel supply from the fuel injection pump |
| 3 | One-cylinder misfire |
| 4 | Six-cylinder misfire |
| 5 | Air filter was clogged |
| 6 | The oil supply pipe was broken, with dripping oil |
| Fault States | Rotating Speeds | Number of Sensors | Sampling Frequency | Sampling Time | Number of Samples |
|---|---|---|---|---|---|
| 1 | 800 rpm | 6 | 20 kHz | 12 s | 30 |
| 2 | 800 rpm | 6 | 20 kHz | 12 s | 30 |
| 3 | 800 rpm | 6 | 20 kHz | 12 s | 30 |
| 4 | 800 rpm | 6 | 20 kHz | 12 s | 30 |
| 5 | 800 rpm | 6 | 20 kHz | 12 s | 30 |
| 6 | 800 rpm | 6 | 20 kHz | 12 s | 30 |
| Serial Number | Feature Taxonomy Combination | Characteristic Parameters | Feature Matrix | Number of Sensors |
|---|---|---|---|---|
| 1 | Common features | 6 | 6 × 2160 | 6 |
| 2 | Time domain features | 19 | 19 × 2160 | 6 |
| 3 | Frequency domain features | 4 | 4 × 2160 | 6 |
| 4 | Time domain + frequency domain features | 23 | 23 × 2160 | 6 |
| 5 | Wavelet packet energy | 8 | 8 × 2160 | 6 |
| 6 | Common features + frequency domain features | 10 | 10 × 2160 | 6 |
| 7 | Common features + wavelet packet energy | 14 | 14 × 2160 | 6 |
| 8 | All features | 31 | 31 × 2160 | 6 |
| Feature Taxonomy Combinations | Number of Features | After Optimization (C, g Values) | Cross Validation Accuracy | Diagnostic Accuracy | Execution Time |
|---|---|---|---|---|---|
| Combination 1 | 6 | (1.3195, 2.2974) | 94.44% | 94.72% | 201.2542 s |
| Combination 2 | 19 | (1024, 0.047366) | 98.27% | 99.16% | 403.2165 s |
| Combination 3 | 4 | (6.9644, 0.25) | 98.33% | 97.50% | 192.6870 s |
| Combination 4 | 23 | (1024, 0.43528) | 97.55% | 96.38% | 400.4194 s |
| Combination 5 | 8 | (1024, 1.3195) | 77.55% | 77.22% | 274.2213 s |
| Combination 6 | 10 | (6.9644, 2.2974) | 99.11% | 99.44% | 205.4491 s |
| Combination 7 | 14 | (337.794, 0.43528) | 99.27% | 99.44% | 297.8969 s |
| Combination 8 | 31 | (1024, 0.14359) | 96.66% | 96.11% | 561.9832 s |
| Dimensionality Reduction Method | After Optimization (C, g Values) | Cross Validation Accuracy | Diagnostic Accuracy | Execution Time |
|---|---|---|---|---|
| SSAE-SVM | (6.9644, 2.2974) | 99.11% | 99.44% | 205.4491 s |
| PCA-SVM | (1024, 4) | 85.66% | 84.16% | 232.9893 s |
| KPCA-SVM | (4, 6.9644) | 94.50% | 94.44% | 219.0951 s |
| Combination Numbers | Combinations | Number of Sensors | Feature Matrices | Input Nodes | Hidden Layer Parameters |
|---|---|---|---|---|---|
| Combination 1 | 1-5-3-6-2-4# | 6 | 60 × 2160 | 60 | (30, 10) |
| Combination 2 | 1-5-3-6-2# | 5 | 50 × 2160 | 50 | (20, 10) |
| Combination 3 | 1-5-3-6# | 4 | 40 × 2160 | 40 | (20, 10) |
| Combination 4 | 1-5-3# | 3 | 30 × 2160 | 30 | (20, 10) |
| Combination 5 | 1-5# | 2 | 20 × 2160 | 20 | (15, 10) |
| Combination 6 | 1# | 1 | 10 × 2160 | 10 | (10, 10) |
| Combination Numbers | Combinations | After optimization (C, g Values) | Cross Validation Accuracy | Diagnostic Accuracy | Execution Time |
|---|---|---|---|---|---|
| Combination 1 | 1-5-3-6-2-4# | (6.9644, 2.2974) | 99.11% | 99.44% | 255.4491 s |
| Combination 2 | 1-5-3-6-2# | (0.435275, 0.75786) | 99.94% | 100.0% | 260.6388 s |
| Combination 3 | 1-5-3-6# | (6.9644, 2.2974) | 99.88% | 100.0% | 208.4682 s |
| Combination 4 | 1-5-3# | (1.31951, 4) | 99.94% | 99.44% | 252.1299 s |
| Combination 5 | 1-5# | (1024, 0.43528) | 97.61% | 96.94% | 248.1764 s |
| Combination 6 | 1# | (12.1257, 2.2974) | 77.55% | 76.38% | 288.8677 s |
| Fault States | SVM | DT | NBC | RF |
|---|---|---|---|---|
| 1 | 100.0% | 93.33% | 90.00% | 96.67% |
| 2 | 100.0% | 95.00% | 93.33% | 98.33% |
| 3 | 100.0% | 100.0% | 100.0% | 100.0% |
| 4 | 100.0% | 96.67% | 100.0% | 100.0% |
| 5 | 100.0% | 88.33% | 95.00% | 98.33% |
| 6 | 100.0% | 100.0% | 100.0% | 100.0% |
| Accuracy | 100.0% | 95.55% | 96.38% | 98.88% |
| Execution Time | 208.4682 s | 223.6581 s | 252.2783 s | 237.1265 s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bai, H.; Zhan, X.; Yan, H.; Wen, L.; Yan, Y.; Jia, X. Research on Diesel Engine Fault Diagnosis Method Based on Stacked Sparse Autoencoder and Support Vector Machine. Electronics 2022, 11, 2249. https://doi.org/10.3390/electronics11142249
Bai H, Zhan X, Yan H, Wen L, Yan Y, Jia X. Research on Diesel Engine Fault Diagnosis Method Based on Stacked Sparse Autoencoder and Support Vector Machine. Electronics. 2022; 11(14):2249. https://doi.org/10.3390/electronics11142249
Chicago/Turabian StyleBai, Huajun, Xianbiao Zhan, Hao Yan, Liang Wen, Yunbin Yan, and Xisheng Jia. 2022. "Research on Diesel Engine Fault Diagnosis Method Based on Stacked Sparse Autoencoder and Support Vector Machine" Electronics 11, no. 14: 2249. https://doi.org/10.3390/electronics11142249