
Applying a Sliding Mode Controller to Maximum Power Point Tracking in a Quasi Z-Source Inverter Based on the Power Curve of a Photovoltaic Cell


Abstract
:1. Introduction
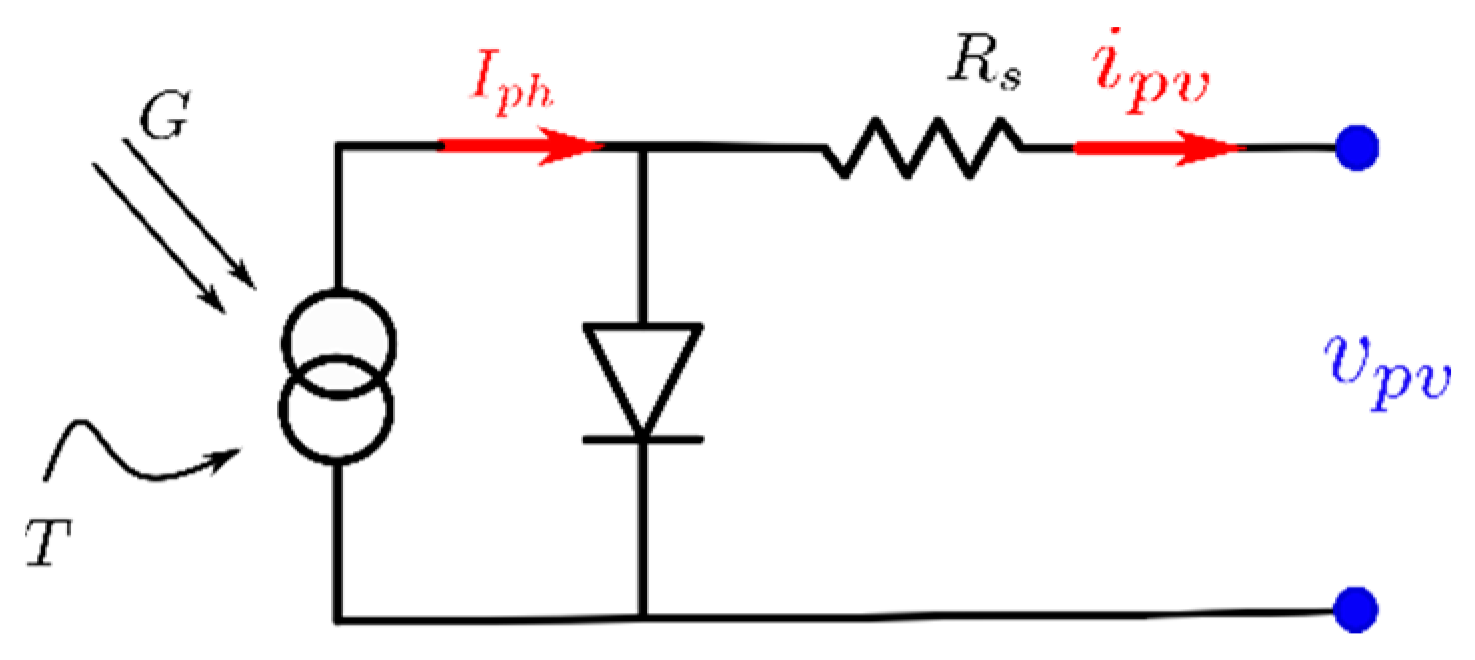
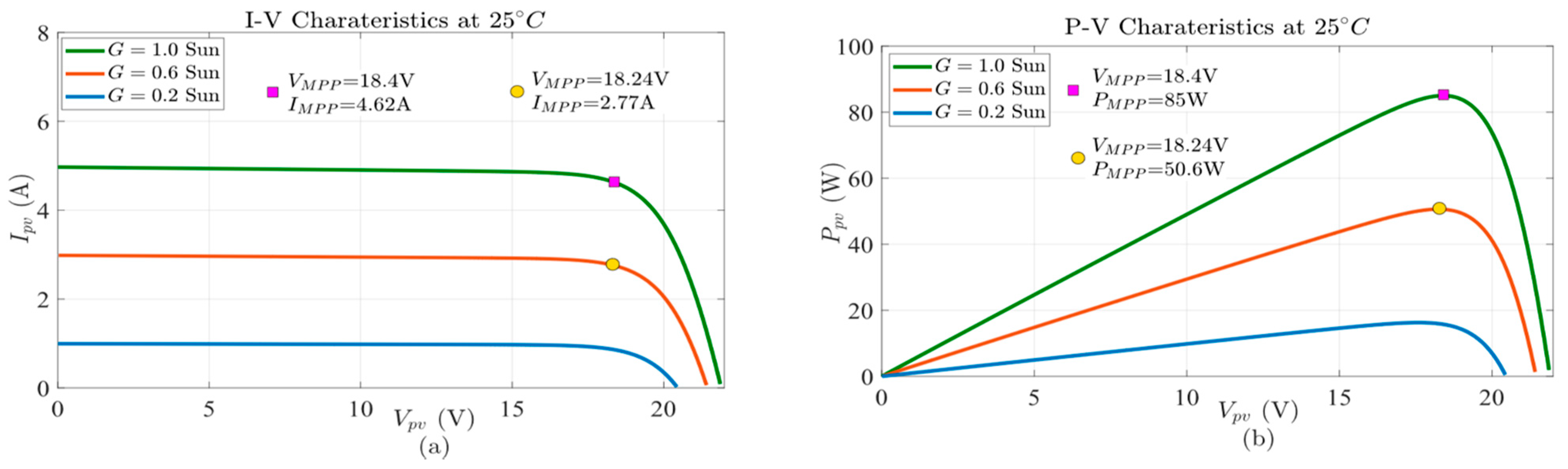
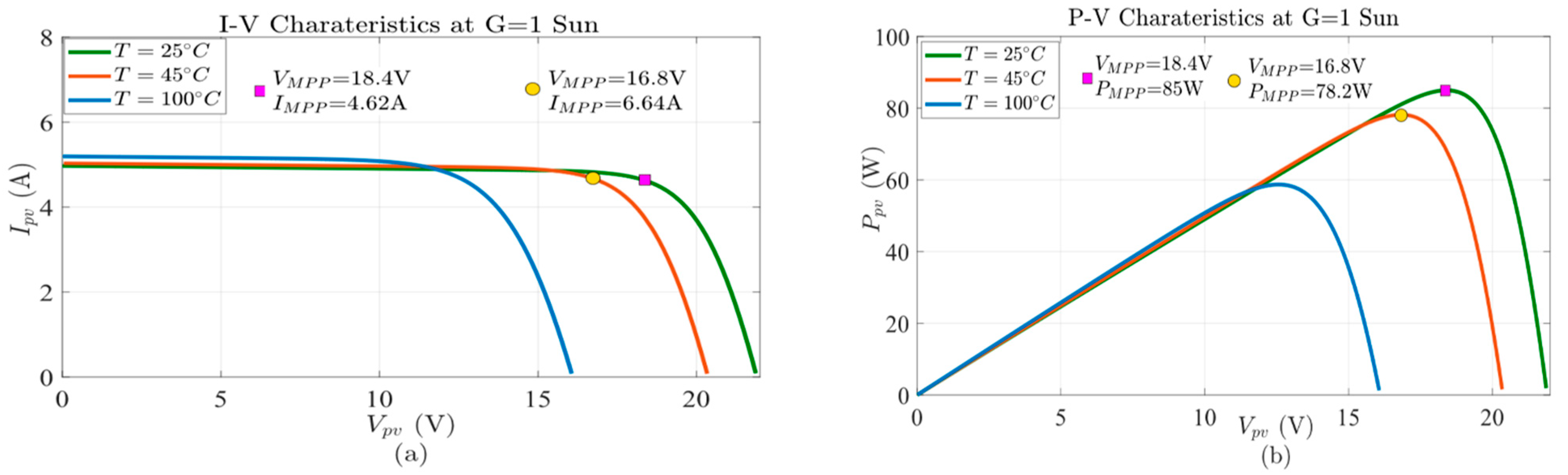
2. PV Characteristics
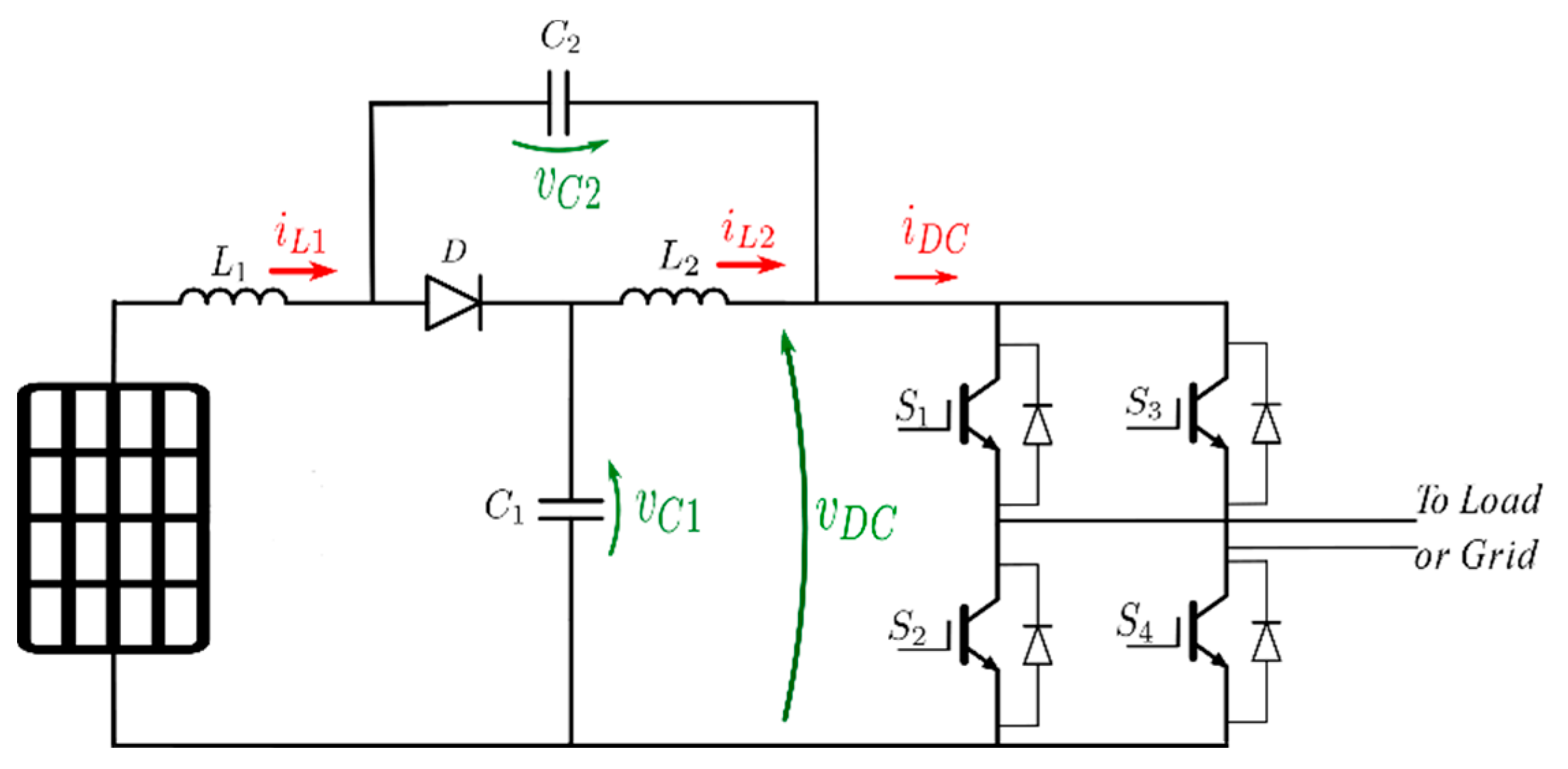
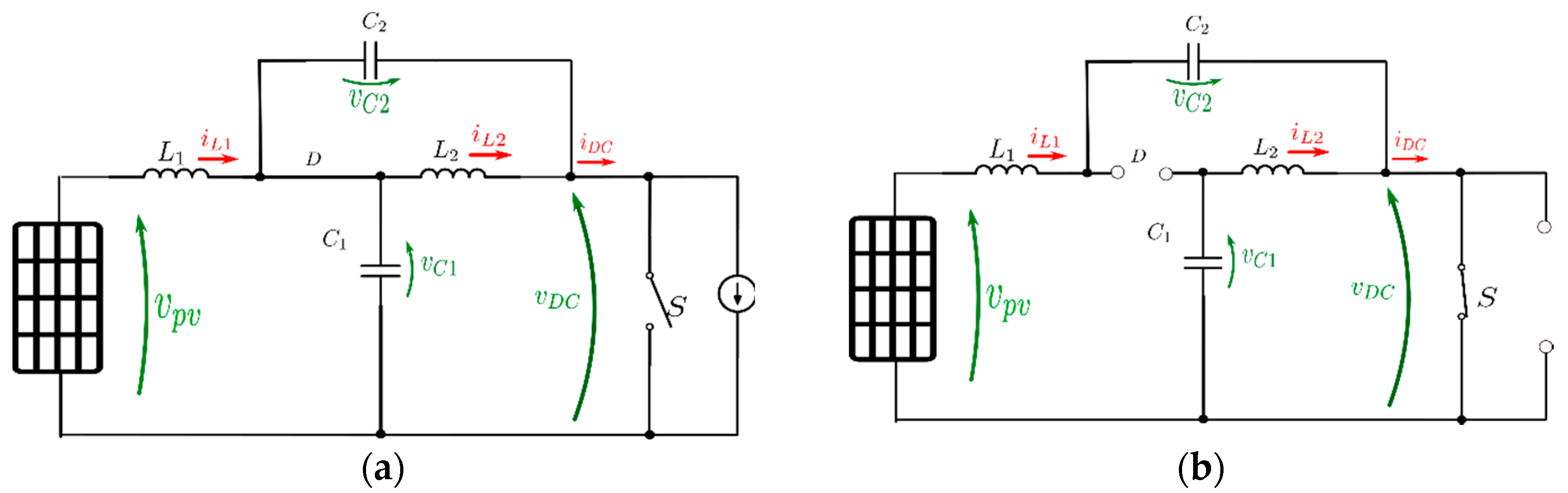
3. Mathematical Model of the qZSI
4. Sliding Mode Controller for the MPPT Unit
4.1. Sliding Surface
4.2. Equivalent Control
4.3. Stability Analysis
5. Simulation and Experimental Results
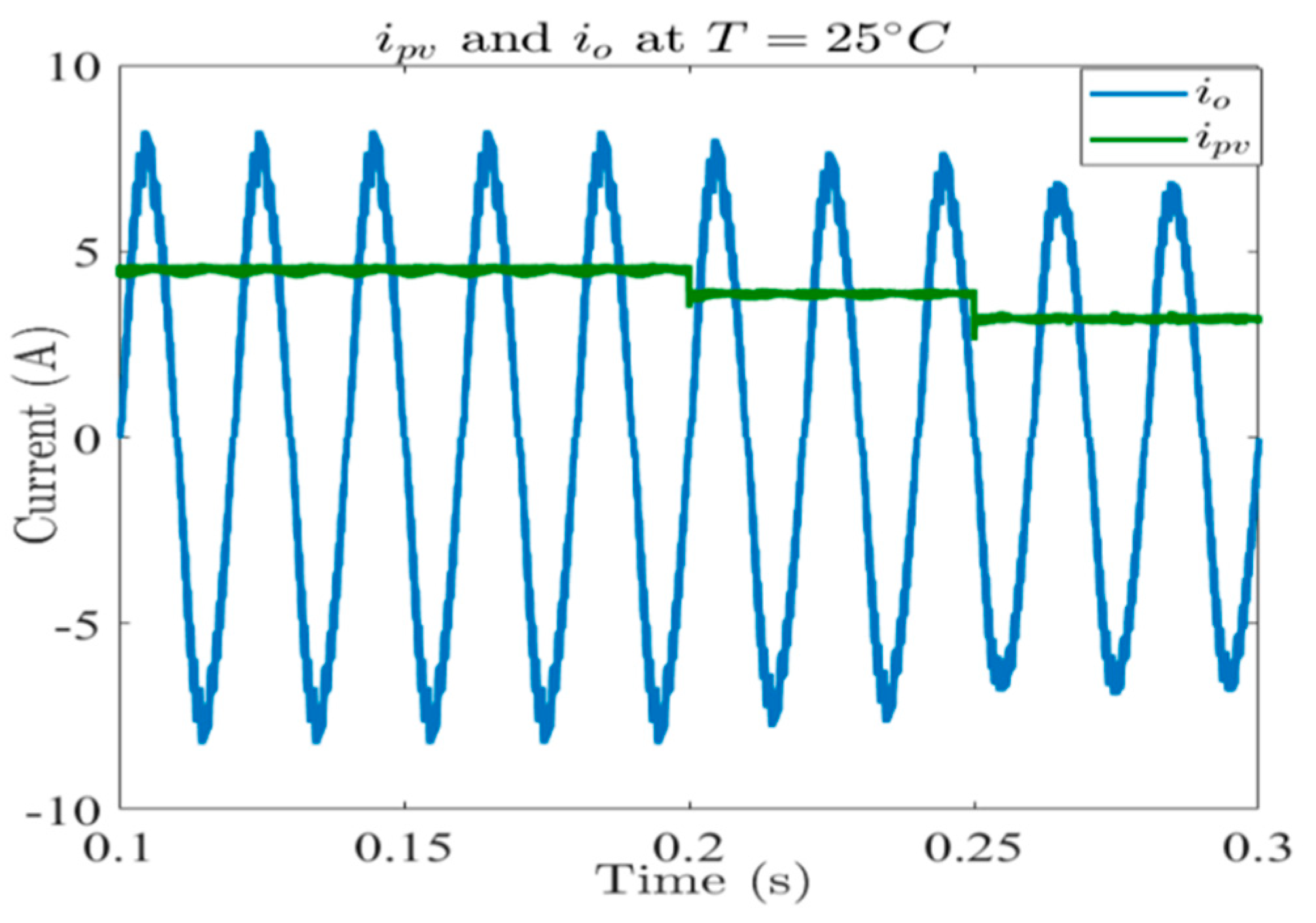
5.1. Response of the SMC-PCPV under Varying Temperatures
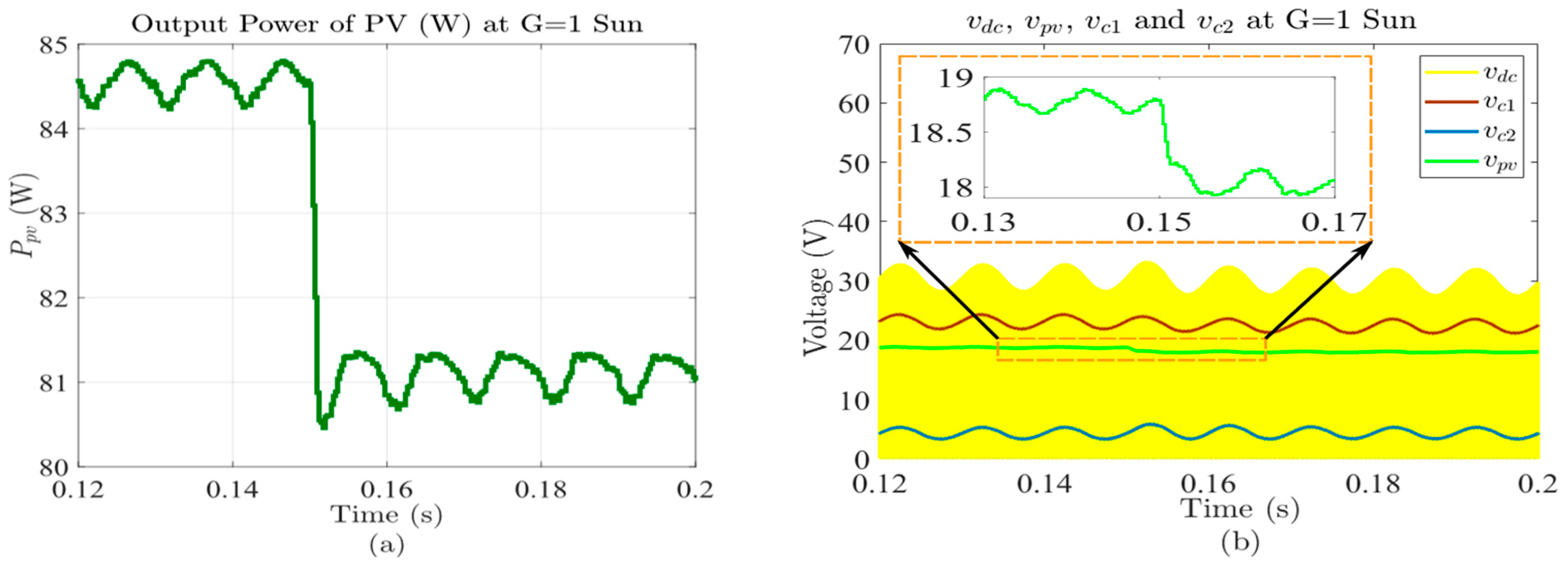
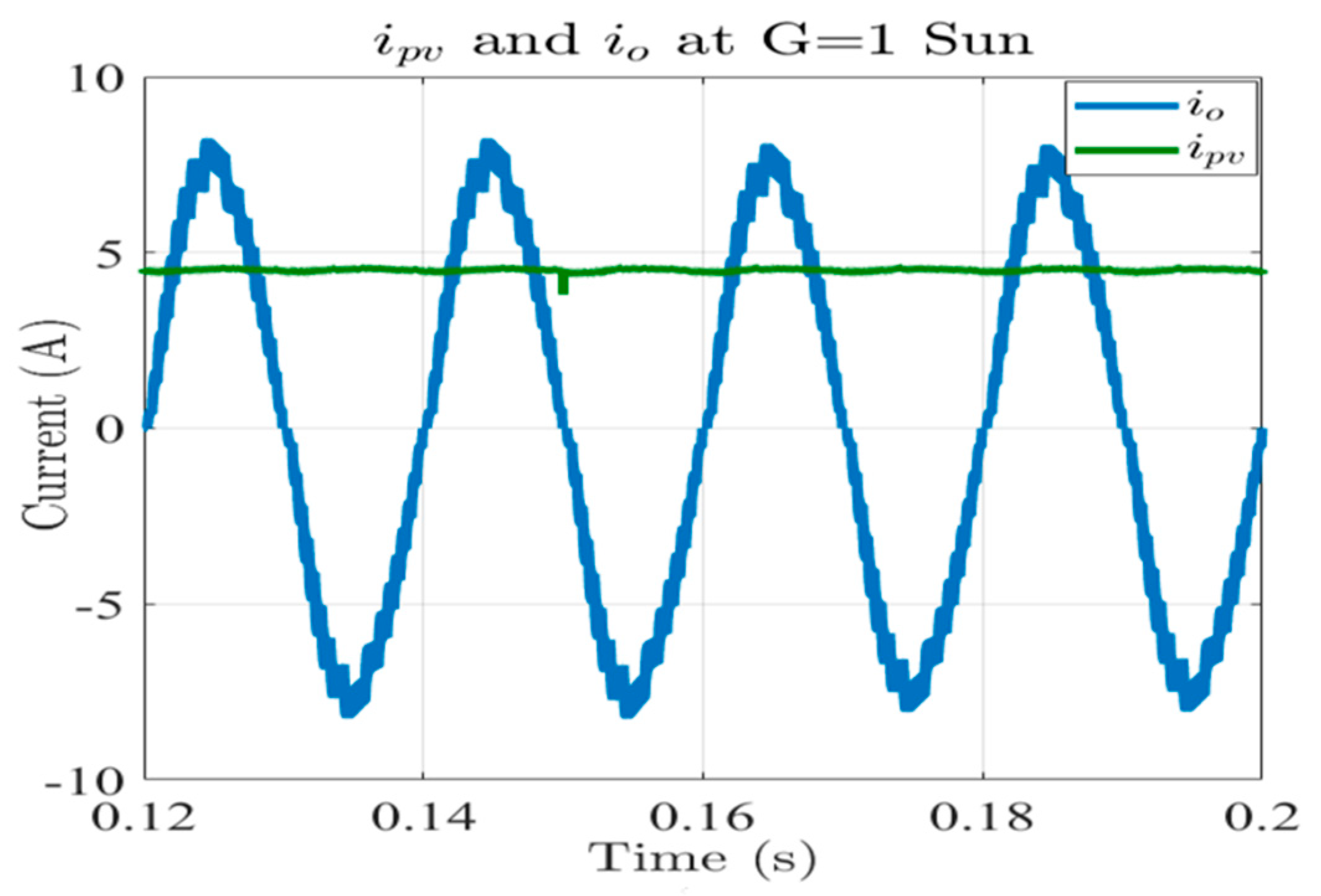
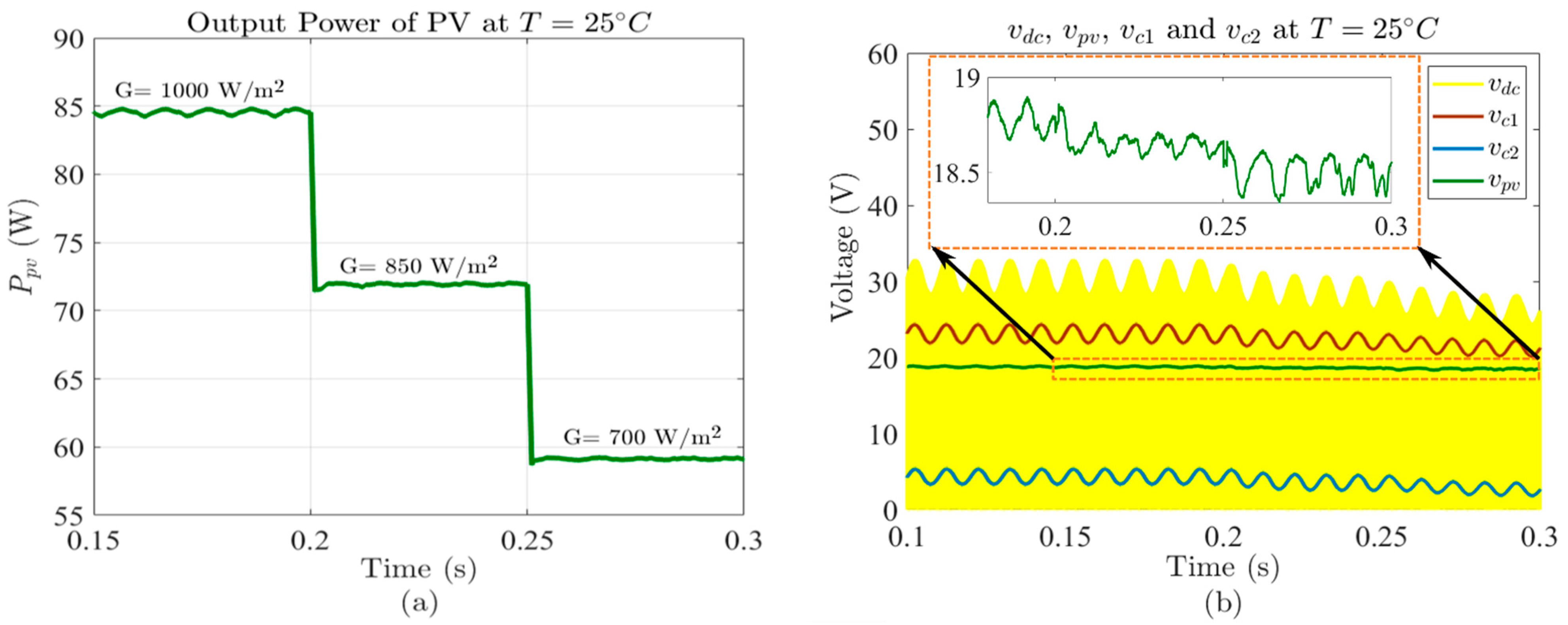
5.2. Response of the SMC-PCPV under Changing Irradiance
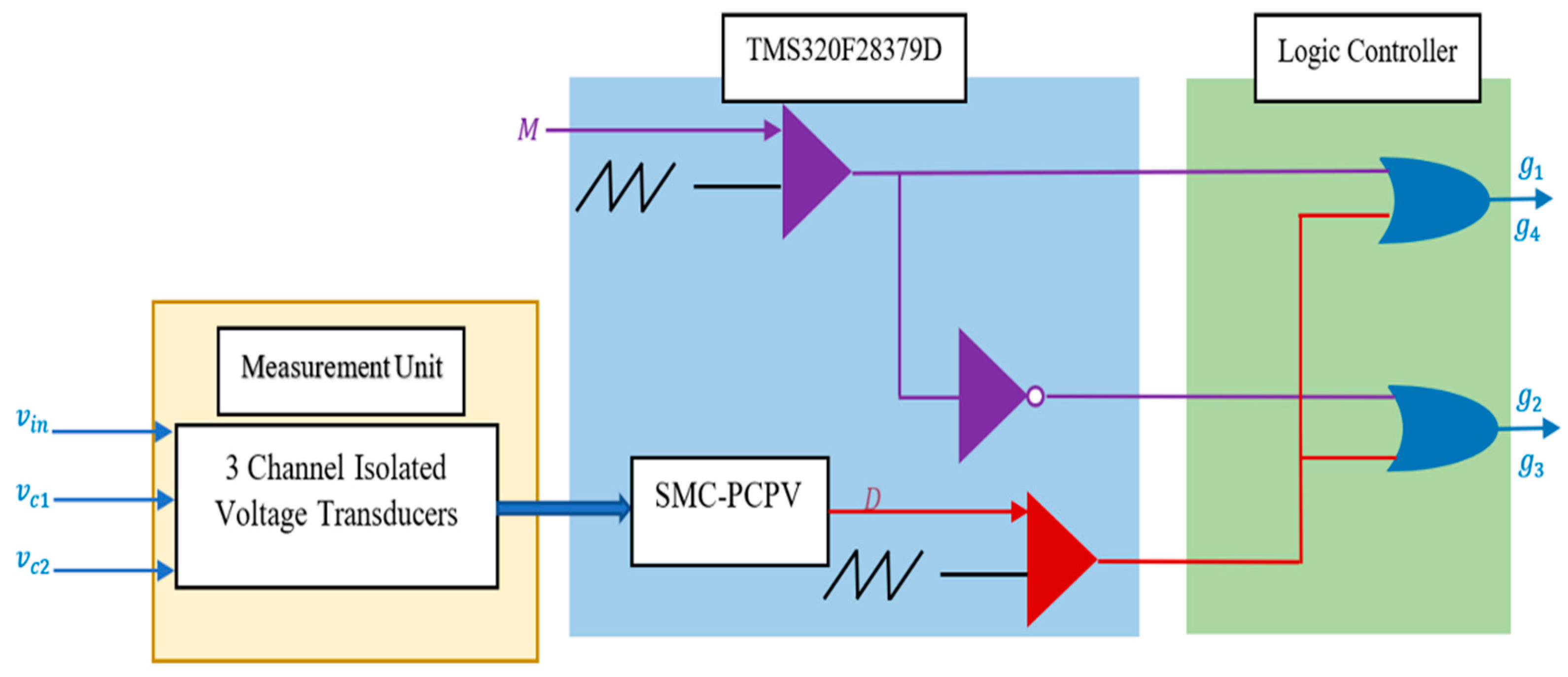
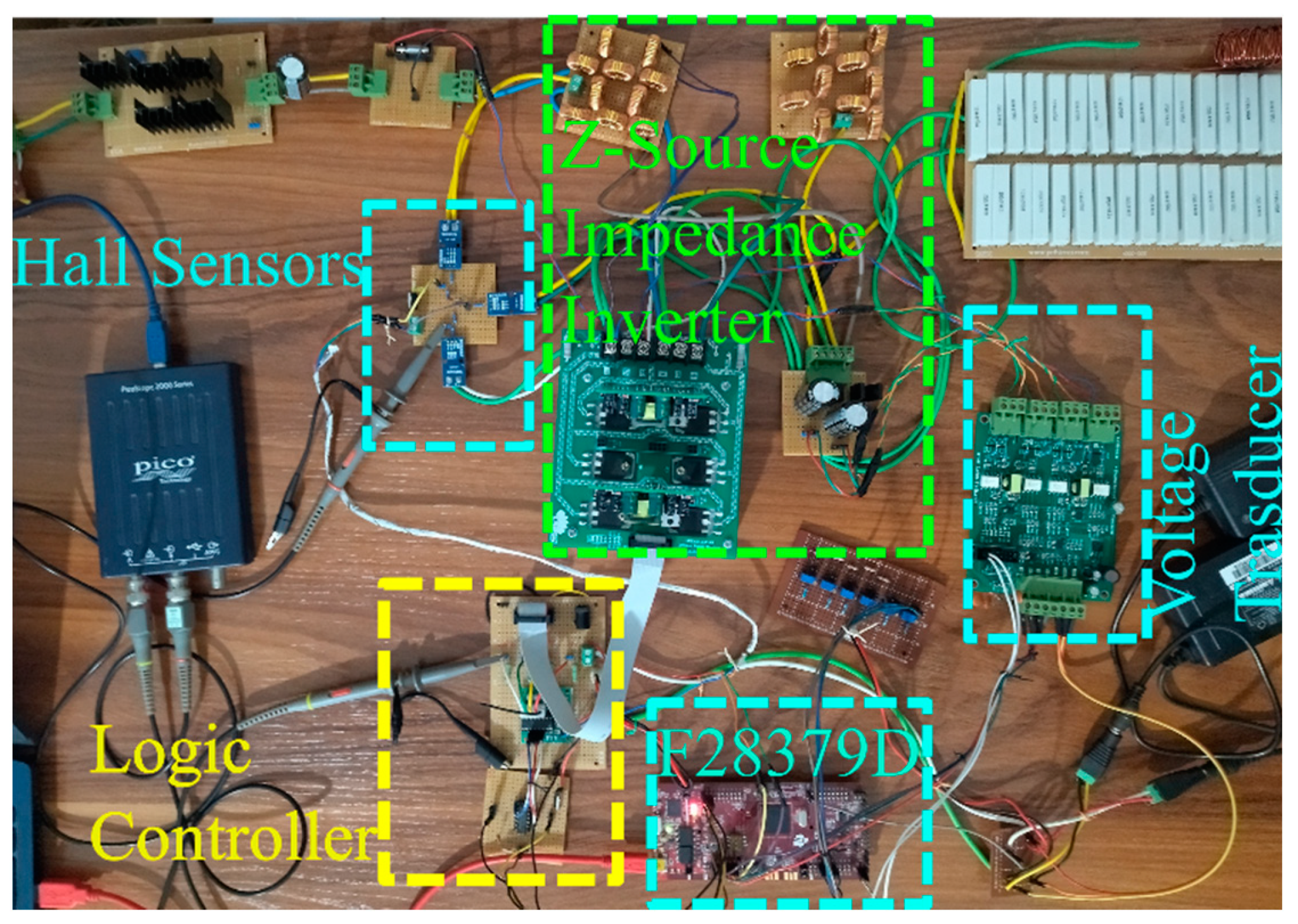
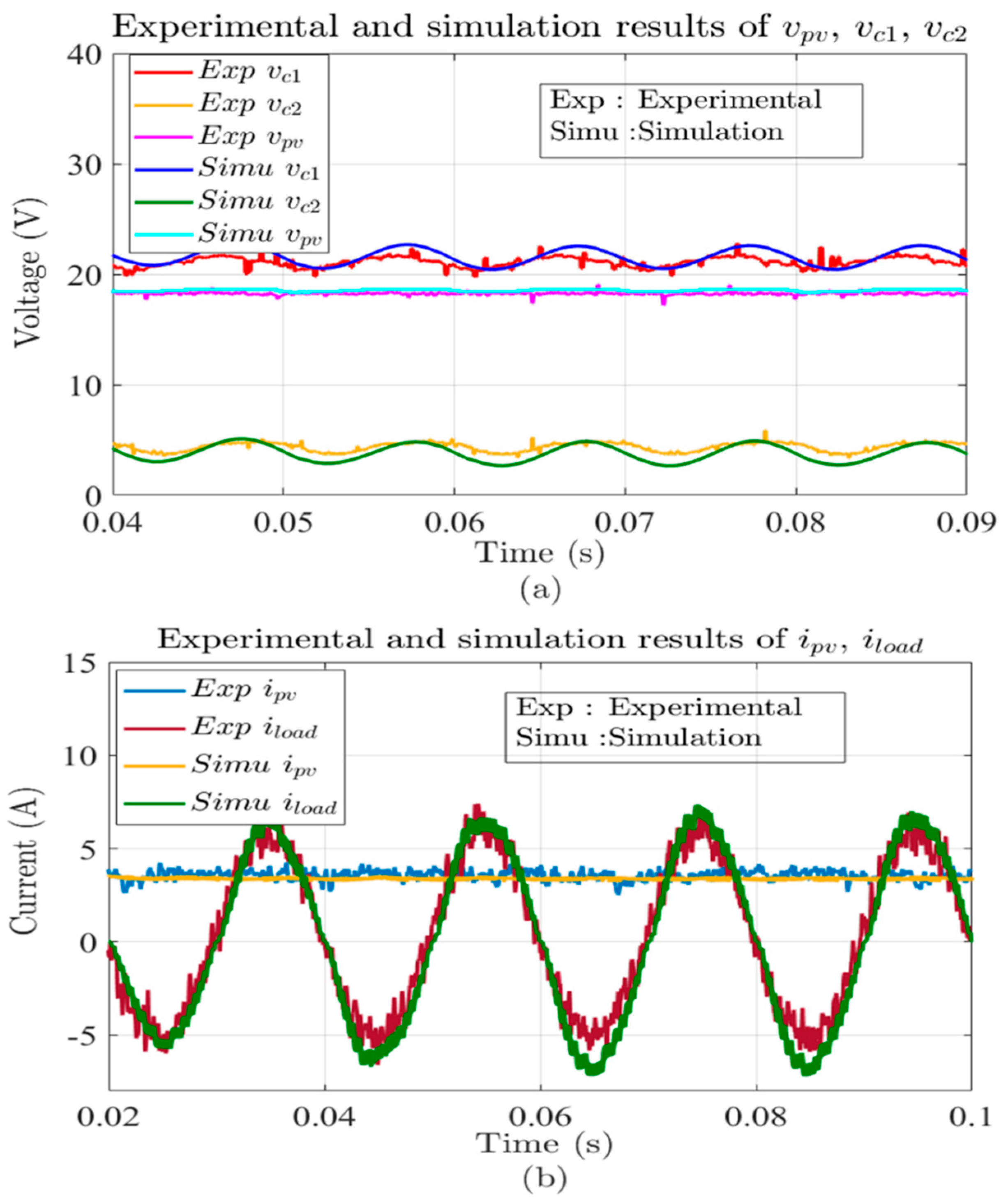
5.3. Experimental Results of the SMC-PCPV
5.4. Comparison of the Dynamic Response
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Arsalan, M.; Iftikhar, R.; Ahmad, I.; Hasan, A.; Sabahat, K.; Javeria, A. MPPT for photovoltaic system using nonlinear backstepping controller with integral action. Sol. Energy 2018, 170, 192–200. [Google Scholar] [CrossRef]
- Reisi, A.R.; Moradi, M.H.; Jamasb, S. Classification and comparison of maximum power point tracking techniques for photovoltaic system: A review. Renew. Sustain. Energy Rev. 2013, 19, 433–443. [Google Scholar] [CrossRef]
- Chankaya, M.; Hussain, I.; Ahmad, A.; Malik, H.; García Márquez, F.P. Multi-objective grasshopper optimization based MPPT and VSC control of grid-tied PV-battery system. Electronics 2021, 10, 2770. [Google Scholar] [CrossRef]
- Shen, M.; Joseph, A.; Wang, J.; Peng, F.Z.; Adams, D.J. Comparison of traditional inverters and Z-source inverter for fuel cell vehicles. IEEE Trans. Power Electron. 2007, 22, 1453–1463. [Google Scholar] [CrossRef]
- Subhani, N.; Kannan, R.; Mahmud, M.A.; Romlie, M.F. Performance analysis of a modernized Z-source inverter for robust boost control in photovoltaic power conditioning systems. Electronics 2019, 8, 139. [Google Scholar] [CrossRef] [Green Version]
- Boros, R.R.; Bodnár, I. Grid and PV fed uninterruptible induction motor drive implementation and measurements. Energies 2022, 15, 708. [Google Scholar] [CrossRef]
- Monjo, L.; Sainz, L.; Mesas, J.J.; Pedra, J. Quasi-Z-source inverter-based photovoltaic power system modeling for grid stability studies. Energies 2021, 14, 508. [Google Scholar] [CrossRef]
- Abu-Rub, H.; Iqbal, A.; Ahmed, S.M.; Peng, F.Z.; Li, Y.; Baoming, G. Quasi-Z-source inverter-based photovoltaic generation system with maximum power tracking control using ANFIS. IEEE Trans. Sustain. Energy 2013, 4, 11–20. [Google Scholar] [CrossRef]
- Zhou, Y.; Liu, L.; Li, H. A high-performance photovoltaic module-integrated converter (mic) based on cascaded quasi-z-source inverters (qzsi) using egan fets. IEEE Trans. Power Electron. 2013, 28, 2727–2738. [Google Scholar] [CrossRef]
- Anderson, J.; Peng, F.Z. Four quasi-Z-source inverters. In Proceedings of the PESC Record—IEEE Annual Power Electronics Specialists Conference, Rhodes, Greece, 15–19 June 2008; IEEE: Piscataway, NJ, USA, 2008; pp. 2743–2749. [Google Scholar]
- Li, Y.; Anderson, J.; Peng, F.Z.; Liu, D. Quasi-z-source inverter for photovoltaic power generation systems. In Proceedings of the 2009 Twenty-Fourth Annual IEEE Applied Power Electronics Conference and Exposition—APEC, Washington, DC, USA, 15–19 February 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 918–924. [Google Scholar]
- Komurcugil, H.; Bayhan, S.; Bagheri, F.; Kukrer, O.; Abu-Rub, H. Model-based current control for single-phase grid-tied quasi-z-source inverters with virtual time constant. IEEE Trans. Ind. Electron. 2018, 65, 8277–8286. [Google Scholar] [CrossRef]
- Liu, Y.; Ge, B.; Abu-Rub, H.; Sun, D. Comprehensive modeling of single-phase quasi-Z-source photovoltaic inverter to investigate low-frequency voltage and current ripple. IEEE Trans. Ind. Electron. 2015, 62, 4194–4202. [Google Scholar] [CrossRef]
- Hanafiah, S.; Ayad, A.; Hehn, A.; Kennel, R. A hybrid MPPT for quasi-Z-source inverters in PV applications under partial shading condition. In Proceedings of the 2017 11th IEEE International Conference on Compatibility, Power Electronics and Power Engineering (CPE-POWERENG), Cadiz, Spain, 4–6 April 2017; IEEE: Piscataway, NJ, USA, 2017. [Google Scholar]
- Niapour, S.K.M.; Danyali, S.; Sharifian, M.B.B.; Feyzi, M.R. Brushless DC motor drives supplied by PV power system based on Z-source inverter and FL-IC MPPT controller. Energy Convers. Manag. 2011, 52, 3043–3059. [Google Scholar] [CrossRef]
- AsSakka, A.O.; Hassan, M.M.; Senjyu, T. Small signal modeling and control of PV based QZSI for grid connected applications. In Proceedings of the International Conference on Modern Electrical and Energy Systems, MEES 2017, Kremenchuk, Ukraine, 15–17 November 2017; IEEE: Piscataway, NJ, USA, 2018; pp. 240–243. [Google Scholar]
- Liang, W.; Liu, Y.; Peng, J. A day and night operational quasi-Z source multilevel grid-tied PV power system to achieve active and reactive power control. IEEE Trans. Power Electron. 2021, 36, 474–492. [Google Scholar] [CrossRef]
- Sun, D.; Ge, B.; Bi, D.; Peng, F.Z. Analysis and control of quasi-Z source inverter with battery for grid-connected PV system. Int. J. Electr. Power Energy Syst. 2013, 46, 234–240. [Google Scholar] [CrossRef]
- Chu, C.C.; Chen, C.L. Robust maximum power point tracking method for photovoltaic cells: A sliding mode control approach. Sol. Energy 2009, 83, 1370–1378. [Google Scholar] [CrossRef]
- Farayola, A.M.; Hasan, A.N.; Ali, A. Curve fitting polynomial technique compared to ANFIS technique for maximum power point tracking. In Proceedings of the 2017 8th International Renewable Energy Congress, IREC, Amman, Jordan, 21–23 March 2017; IEEE: Piscataway, NJ, USA, 2017. [Google Scholar]
- Mosalam, H.A.; Amer, R.A.; Morsy, G.A. Fuzzy logic control for a grid-connected PV array through Z-source-inverter using maximum constant boost control method. Ain Shams Eng. J. 2018, 9, 2931–2941. [Google Scholar] [CrossRef]
- Manikandan, P.V.; Selvaperumal, S. EANFIS-based maximum power point tracking for standalone PV system. IETE J. Res. 2020, 1–14. [Google Scholar] [CrossRef]
- Metry, M.; Liu, Y.; Balog, R.S.; Abu-Rub, H. Model predictive control for maximum power point tracking of quasi-Z-source inverter based grid-tied photovoltaic power system. In Proceedings of the 2017 IEEE 26th International Symposium on Industrial Electronics (ISIE), Edinburgh, UK, 19–21 June 2017; IEEE: Piscataway, NJ, USA, 2017. [Google Scholar]
- Abderrahim, T.; Abdelwahed, T.; Radouane, M. Improved strategy of an MPPT based on the sliding mode control for a PV system. Int. J. Electr. Comput. Eng. IJECE 2020, 10, 3074–3085. [Google Scholar] [CrossRef]
- Khanaki, R.; Mohd Radzi, M.A.; Marhaban, M.H. Artificial neural network based maximum power point tracking controller for photovoltaic standalone system. Int. J. Green Energy 2016, 13, 283–291. [Google Scholar] [CrossRef]
- Khanaki, R.; Radzi, M.A.M.; Marhaban, M.H. Backstepping based super-twisting sliding mode MPPT control with differential flatness oriented observer design for photovoltaic system. Electronics 2020, 9, 1543. [Google Scholar]
- Mokhlis, M.; Ferfra, M.; Abbou, A.; Idrissi, R.E.; Ahmed, C.C. SMC based MPPT to track the GMPP under partial shading. In Proceedings of the 2019 7th International Renewable and Sustainable Energy Conference, IRSEC 2019, Agadir, Morocco, 27–30 November 2019. [Google Scholar]
- Pradhan, R.; Subudhi, B. Double integral sliding mode MPPT control of a photovoltaic system. IEEE Trans. Control Syst. Technol. 2016, 24, 285–292. [Google Scholar] [CrossRef]
- Liu, J.; Jiang, S.; Cao, D.; Lu, X.; Peng, F.Z. Sliding-mode control of quasi-Z-source inverter with battery for renewable energy system. In Proceedings of the IEEE Energy Conversion Congress and Exposition: Energy Conversion Innovation for a Clean Energy Future, ECCE 2011, Phoenix, AZ, USA, 17–22 September 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 3665–3671. [Google Scholar]
- Bagheri, F.; Komurcugil, H.; Kukrer, O.; Guler, N.; Bayhan, S. Multi-input multi-output-based sliding-mode controller for single-phase quasi-Z-source inverters. IEEE Trans. Ind. Electron. 2020, 67, 6439–6449. [Google Scholar] [CrossRef]
- Bayhan, S.; Komurcugil, H. A sliding-mode controlled single-phase grid-connected quasi-Z-source NPC inverter with double-line frequency ripple suppression. IEEE Access 2019, 7, 160004–160016. [Google Scholar] [CrossRef]
- Shinde, U.K.; Kadwane, S.G.; Gawande, S.P.; Reddy, M.J.B.; Mohanta, D.K. Sliding mode control of single-phase grid-connected quasi-Z-source inverter. IEEE Access 2017, 5, 10232–10240. [Google Scholar] [CrossRef]
- Komurcugil, H.; Bayhan, S. Super-twisting sliding mode control for grid-tied T-type qZSI with reduced capacitor voltage. In Proceedings of the 2020 IEEE 29th International Symposium on Industrial Electronics (ISIE), Delft, The Netherlands, 17–19 June 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 790–795. [Google Scholar]
- Álvarez, J.M.; Alfonso-Corcuera, D.; Roibás-Millán, E.; Cubas, J.; Cubero-Estalrrich, J.; Gonzalez-Estrada, A.; Jado-Puente, R.; Sanabria-Pinzón, M.; Pindado, S. Analytical modeling of current-voltage photovoltaic performance: An easy approach to solar panel behavior. Appl. Sci. 2021, 11, 4250. [Google Scholar] [CrossRef]
- Xu, S.; Shao, R.; Cao, B.; Chang, L. Single-phase grid-connected PV system with golden section search-based MPPT algorithm. Chin. J. Electr. Eng. 2021, 7, 25–36. [Google Scholar] [CrossRef]
- Chen, S.H.; Huang, T.C.; Ng, S.S.; Lin, K.L.; Du, M.J.; Kang, Y.C.; Chen, K.H.; Wey, C.L.; Lin, Y.H.; Lee, C.C.; et al. A direct AC-DC and DC-DC cross-source energy harvesting circuit with analog iterating-based MPPT technique with 72.5% conversion efficiency and 94.6% tracking efficiency. IEEE Trans. Power Electron. 2016, 31, 5885–5899. [Google Scholar] [CrossRef]
- Armghan, H.; Ahmad, I.; Armghan, A.; Khan, S.; Arsalan, M. Backstepping based non-linear control for maximum power point tracking in photovoltaic system. Sol. Energy 2018, 159, 134–141. [Google Scholar]
- Anto, E.K.; Asumadu, J.A.; Okyere, P.Y. PID control for improving P&O-MPPT performance of a grid-connected solar PV system with Ziegler-Nichols tuning method. In Proceedings of the 2016 IEEE 11th Conference on Industrial Electronics and Applications (ICIEA), Hefei, China, 5–7 June 2016; IEEE: Piscataway, NJ, USA, 2016. [Google Scholar]
- Prasad, C.B.; Sonam, S.K.; Reddy, B.R.G.; Harika, P. A fuzzy logic based MPPT method for solar power generation. In Proceedings of the 2017 International Conference on Intelligent Computing and Control Systems, ICICCS 2017, Madurai, India, 15–16 June 2017; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2017; pp. 1182–1186. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| ) | 500 µH |
| ) | 3300 µF |
| Load resistance | 2.5 Ω |
| Load inductance | 200 µH |
| Modulation index | 0.7 |
| Switching frequency | 10 kHz |
| Output frequency | 50 H z |
| Parameter | Value |
|---|---|
| The voltage at the maximum power point, | 18.4 V |
| Current at the maximum power point, | 4.62 A |
| Open-circuit voltage, | 21.9 V |
| Short-circuit current, | 4.97 A |
| Maximum power | 85 W |
| Irradiance Level | ||||
|---|---|---|---|---|
| Temperature | 25 °C | 35 °C | 25 °C | |
| 18.6 V | 17.9 V | 18.4 V | 18.3 V | |
| 4.5 A | 4.5 A | 3.85 A | 3.15 A | |
| 83.7 W | 80.55 W | 70.84 W | 57.62 W | |
| 85 W | 81.6 W | 72 W | 59.2 W | |
| 1.52% | 1.35% | 1.6% | 2.65% | |
| Estimated/measured | Me 1 | Me | Es 2 | Es | Es | Me | Me | Me | |
| Case A | 21.6 V | 3.7 A | 18.3 V | 3.42 A | 62.5 W | 18.2 V | 3.2 A | 60 W | 4% |
| Case B | 21.3 V | 2.75 A | 18.19 V | 2.54 A | 46.2 W | 17.92 V | 2.5 A | 44.8 W | 3% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahangarkolaei, J.M.; Izadi, M.; Nouri, T. Applying a Sliding Mode Controller to Maximum Power Point Tracking in a Quasi Z-Source Inverter Based on the Power Curve of a Photovoltaic Cell. Electronics 2022, 11, 2164. https://doi.org/10.3390/electronics11142164
Ahangarkolaei JM, Izadi M, Nouri T. Applying a Sliding Mode Controller to Maximum Power Point Tracking in a Quasi Z-Source Inverter Based on the Power Curve of a Photovoltaic Cell. Electronics. 2022; 11(14):2164. https://doi.org/10.3390/electronics11142164
Chicago/Turabian StyleAhangarkolaei, Jaber Merrikhi, Mahdi Izadi, and Tohid Nouri. 2022. "Applying a Sliding Mode Controller to Maximum Power Point Tracking in a Quasi Z-Source Inverter Based on the Power Curve of a Photovoltaic Cell" Electronics 11, no. 14: 2164. https://doi.org/10.3390/electronics11142164