
Real-Time State-of-Charge Estimation Using an Embedded Board for Li-Ion Batteries


Abstract
:1. Introduction
2. Methodology for SOC Estimation
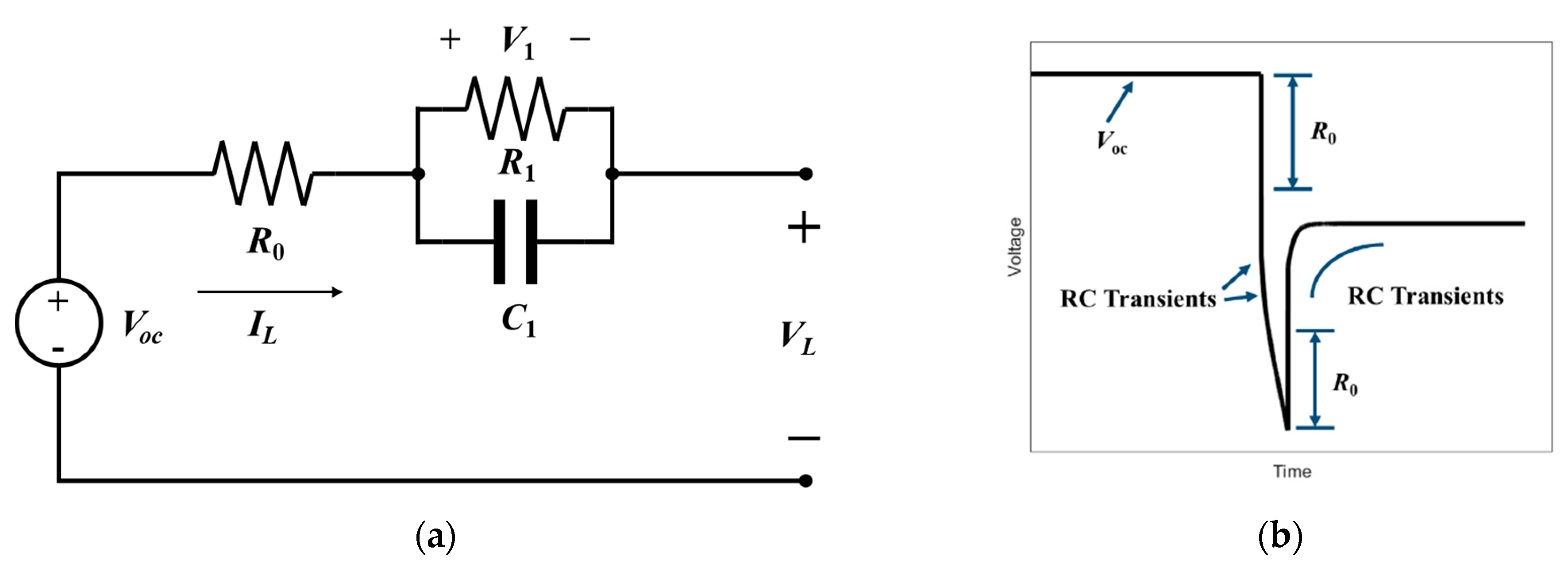
2.1. Battery Model
2.1.1. Parameter Identification
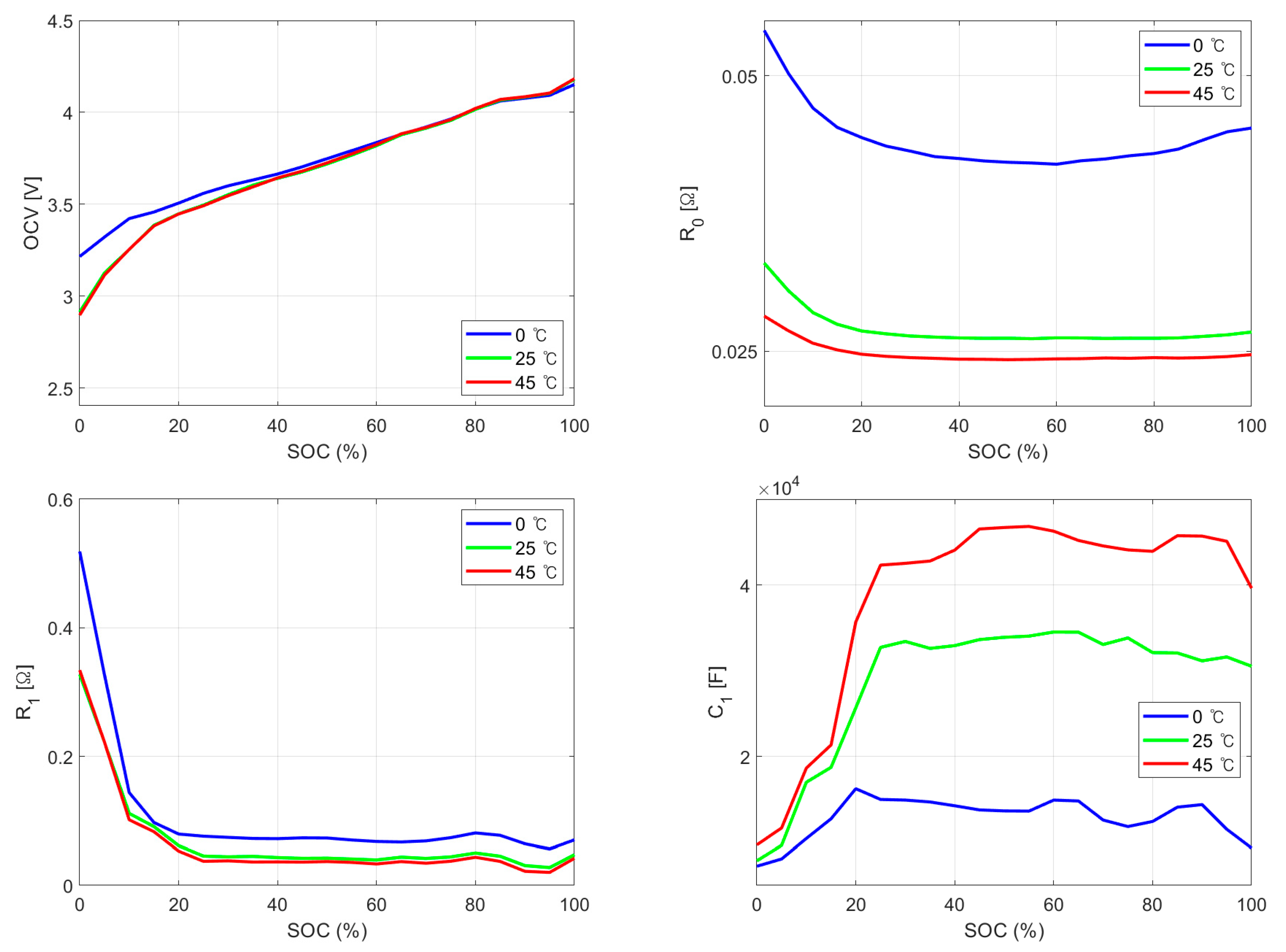
2.1.2. Operating Temperature Effect of Battery Parameters
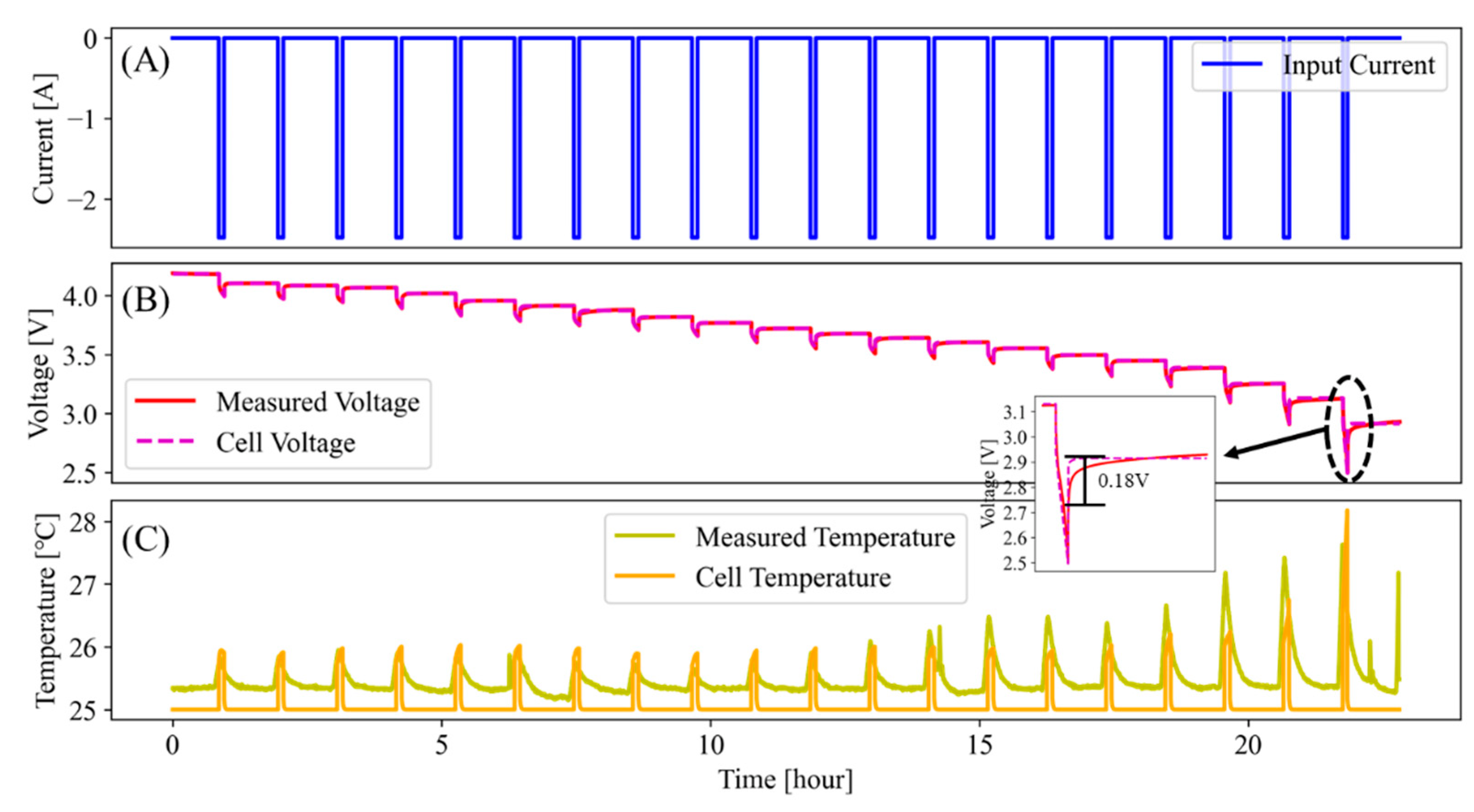
2.1.3. Battery Model Verification in Simulation
2.2. SOC Estimation Algorithm
2.2.1. Extended Kalman Filter (EKF)
2.2.2. Unsented Kalman Filter (UKF)
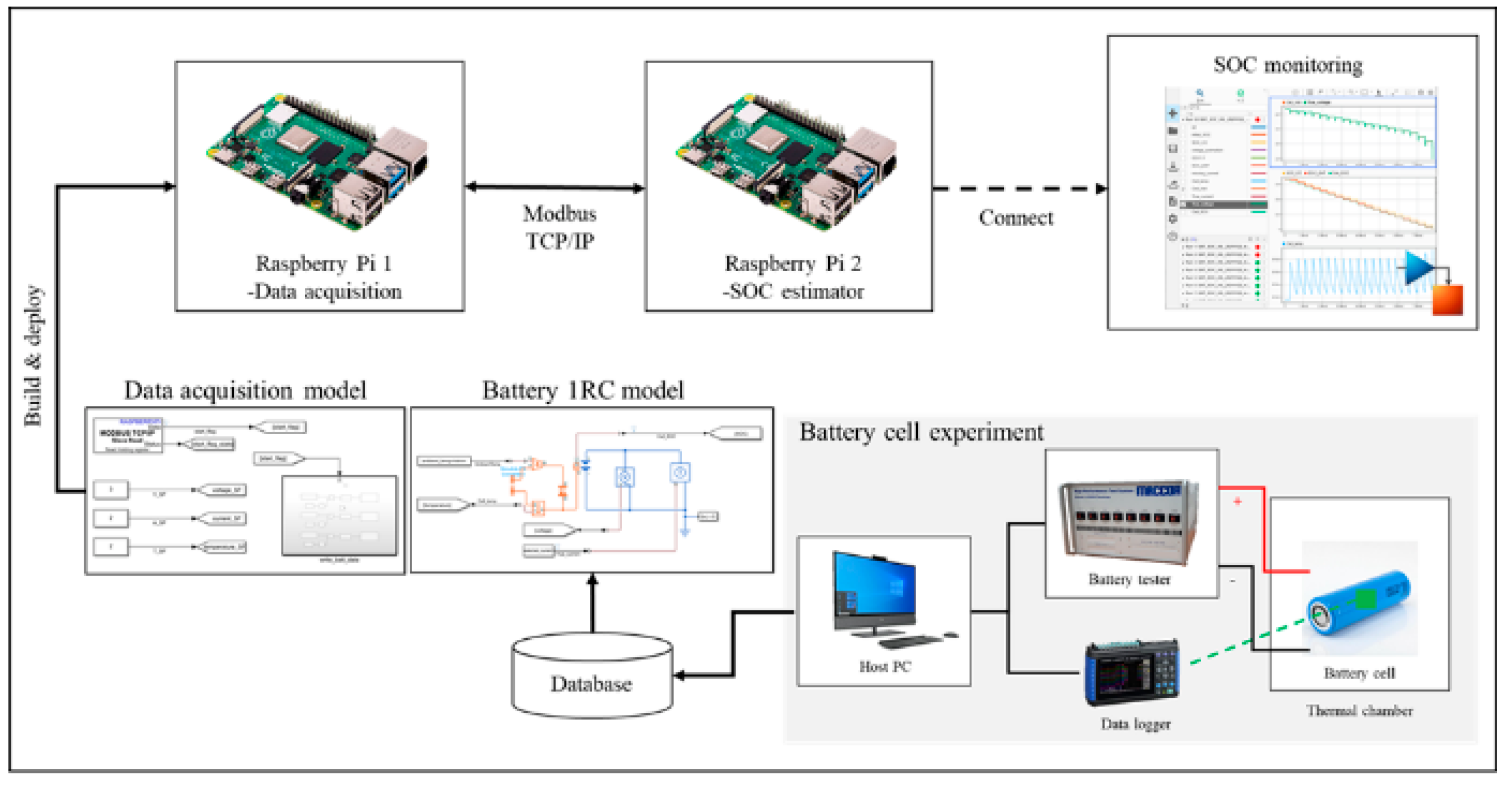
3. Experimental Setup for Real-Time Test
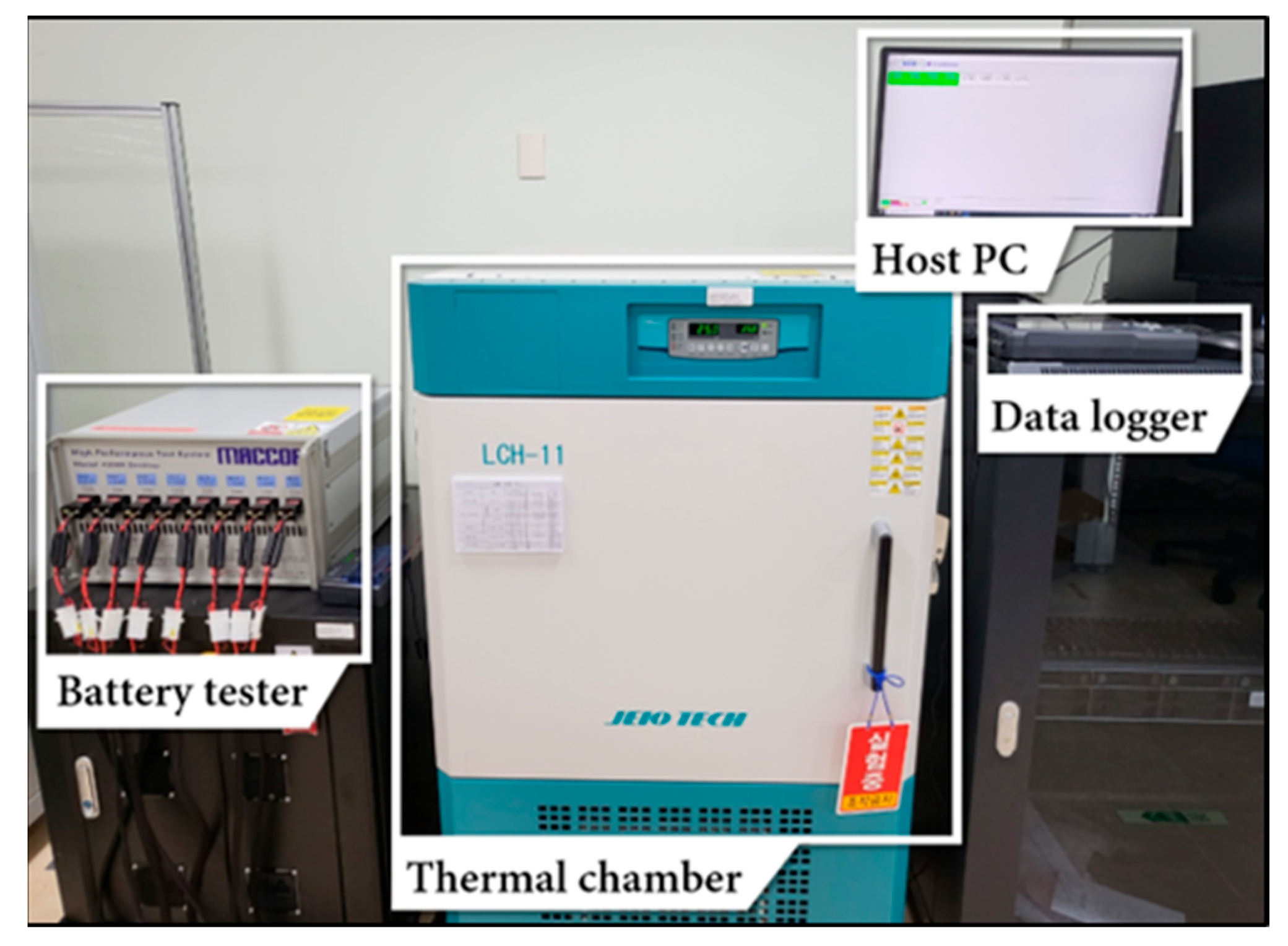
3.1. Test Bench
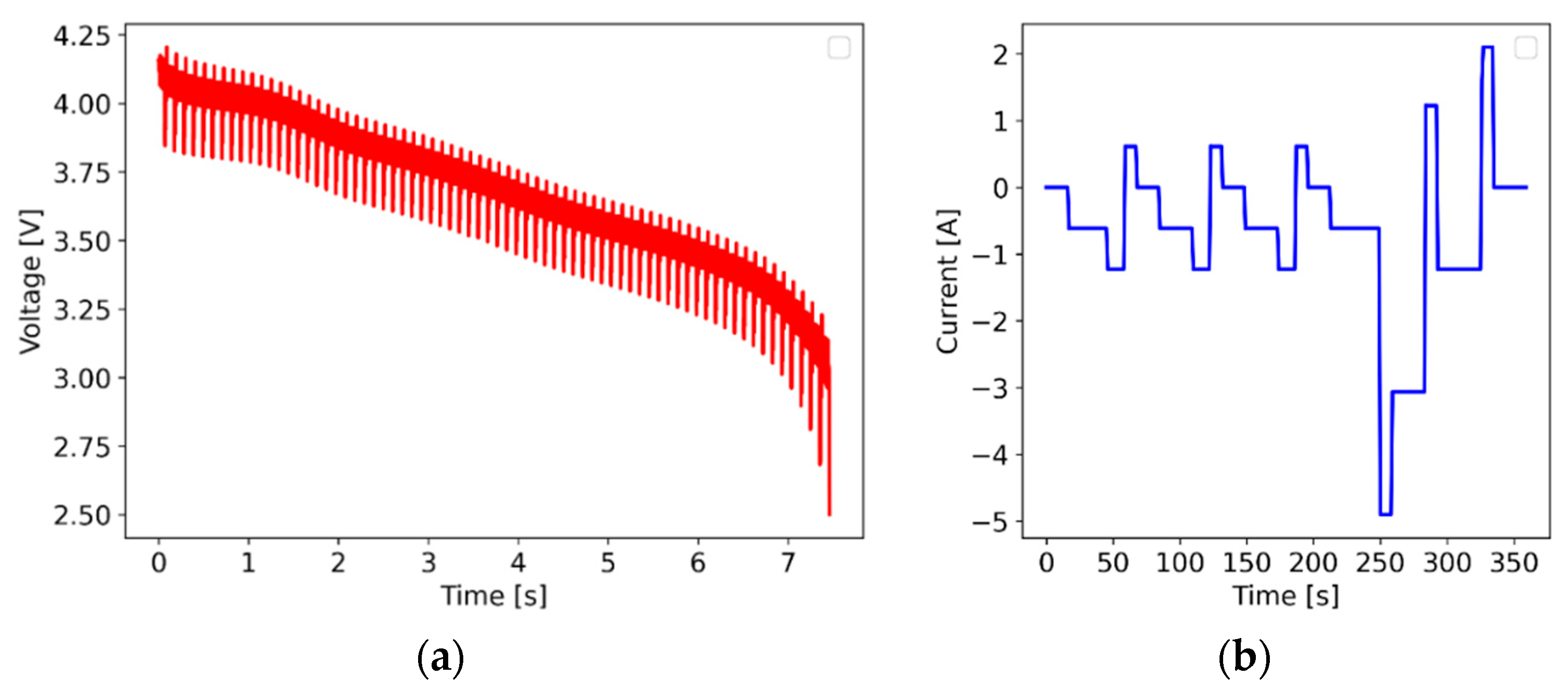
3.1.1. Battery Cell Experiment
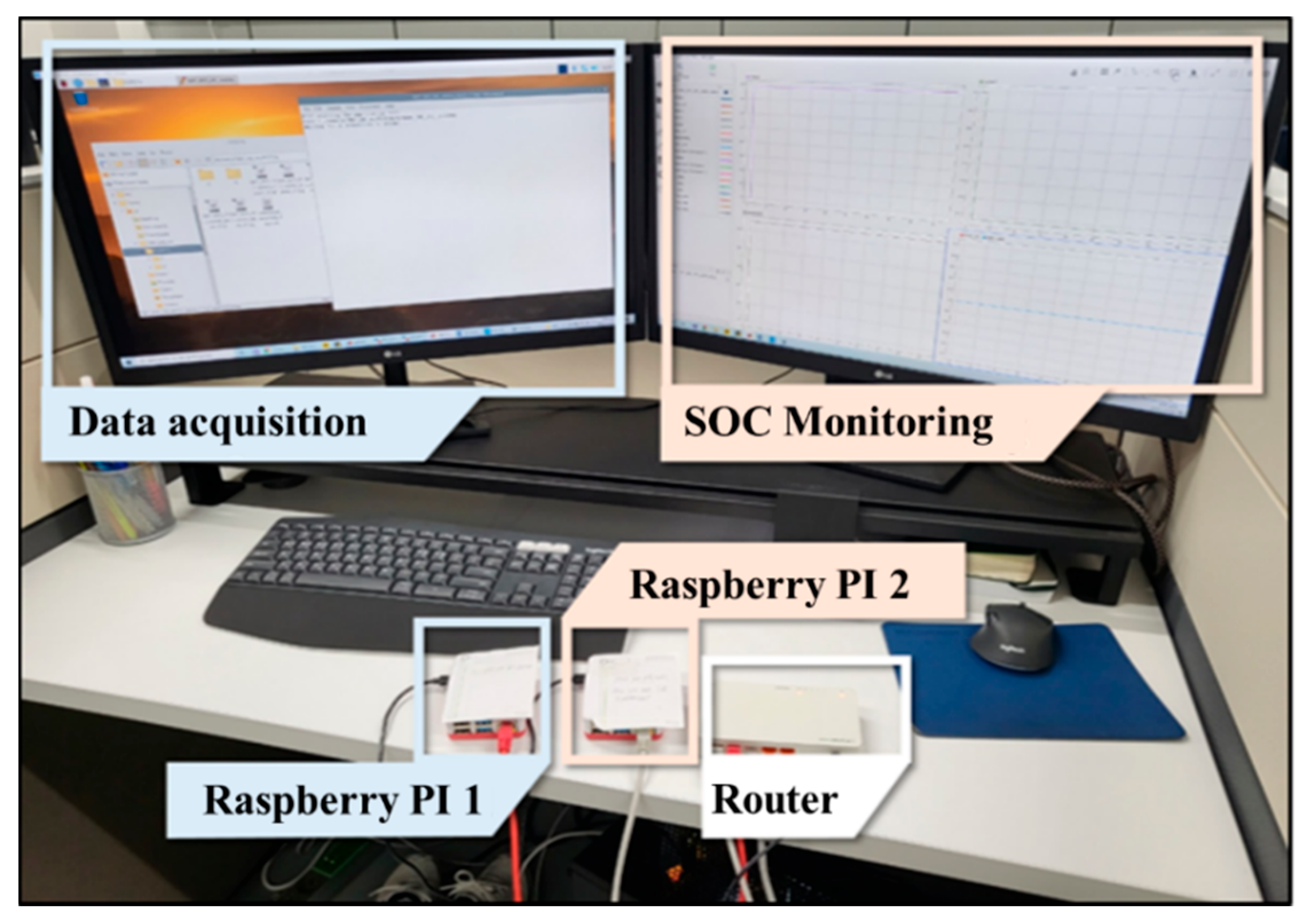
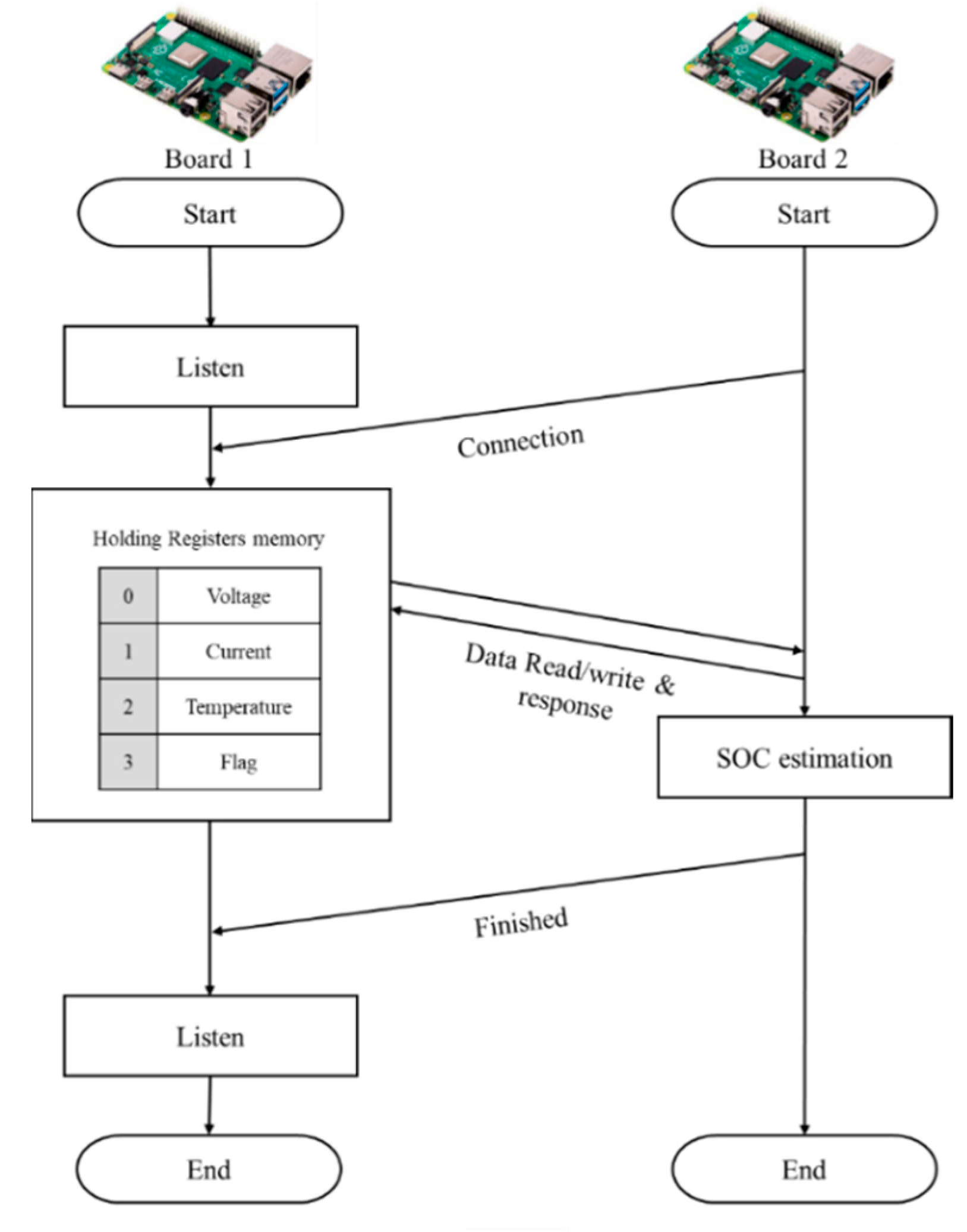
3.1.2. Raspberry Pi Setting
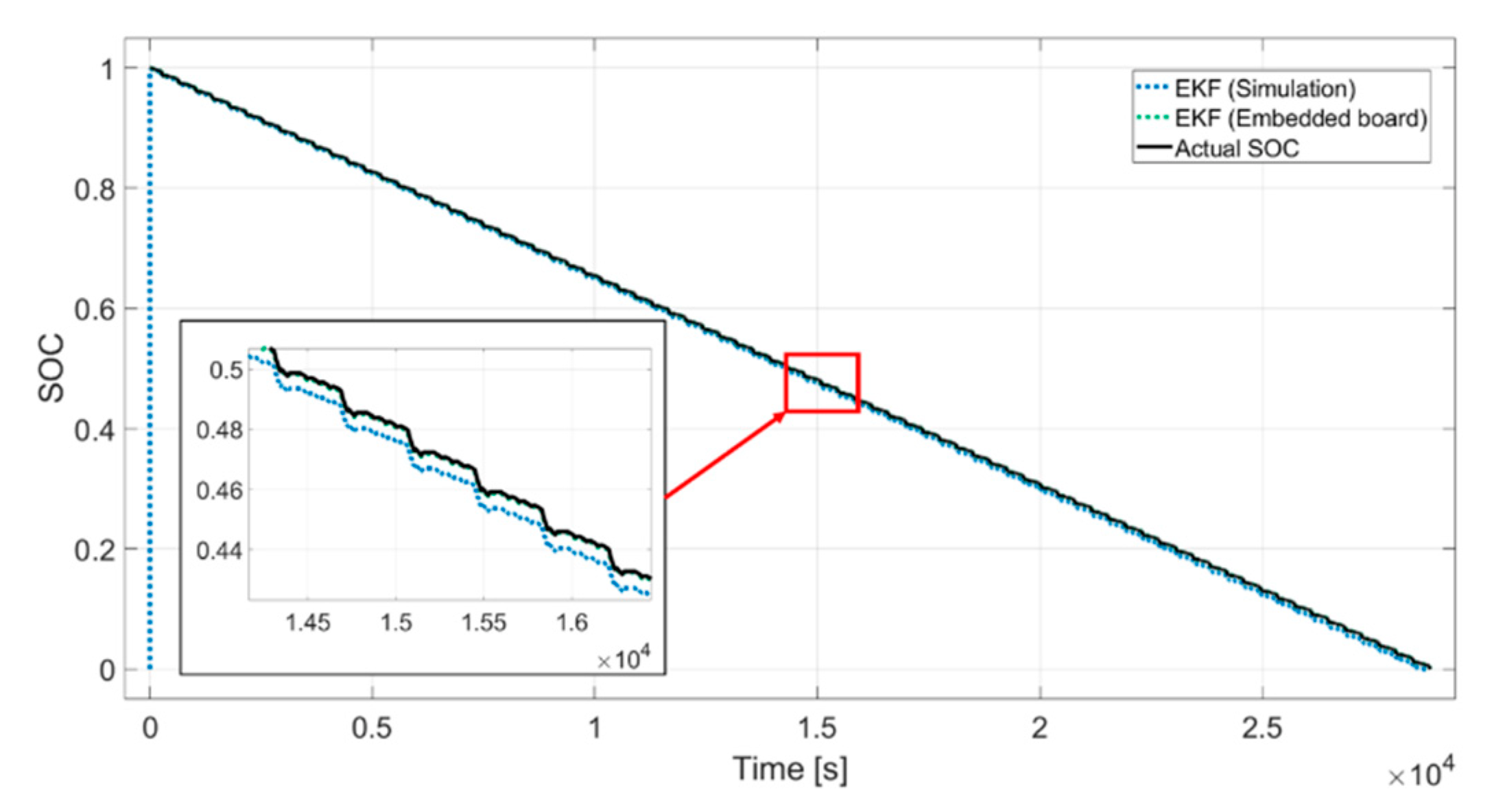
3.2. Residual SOC between Simulation and Embedded Board
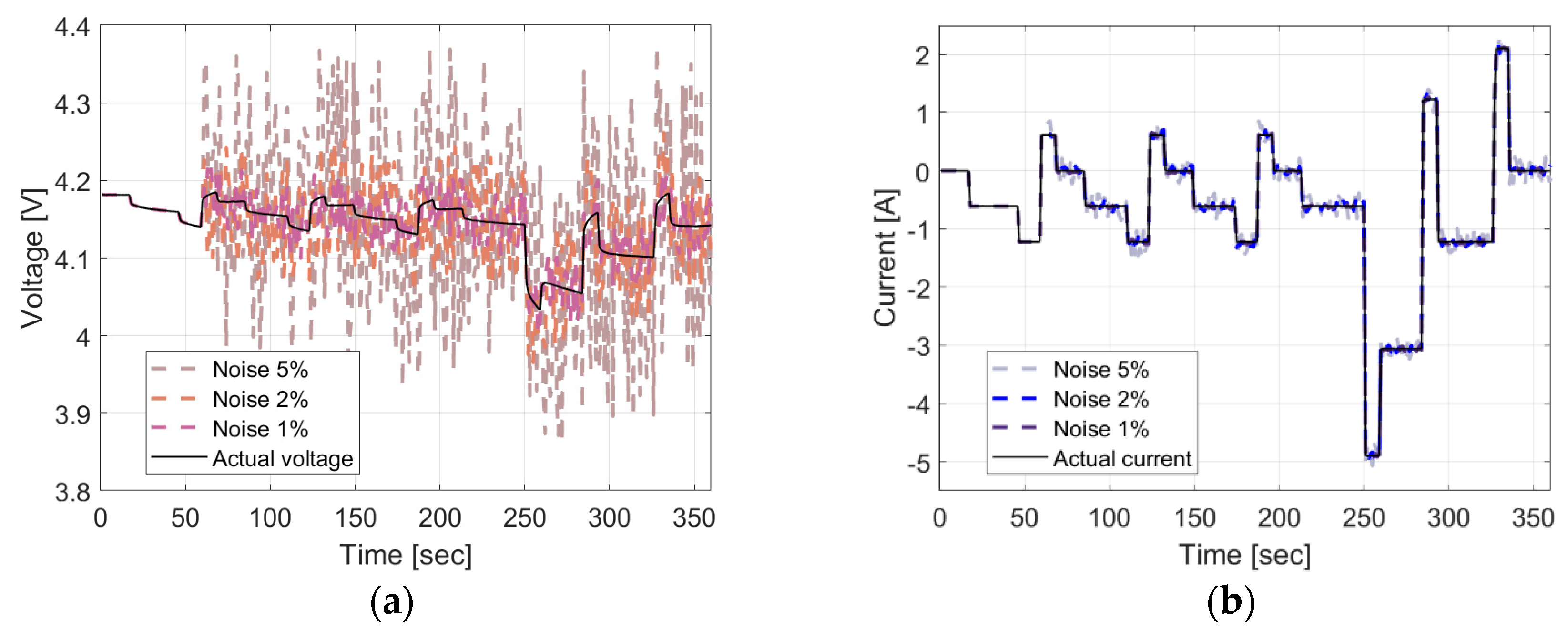
3.3. Sensor Noise Models
4. Results of Real-Time SOC Estimation
4.1. Analysis of Computing Cost
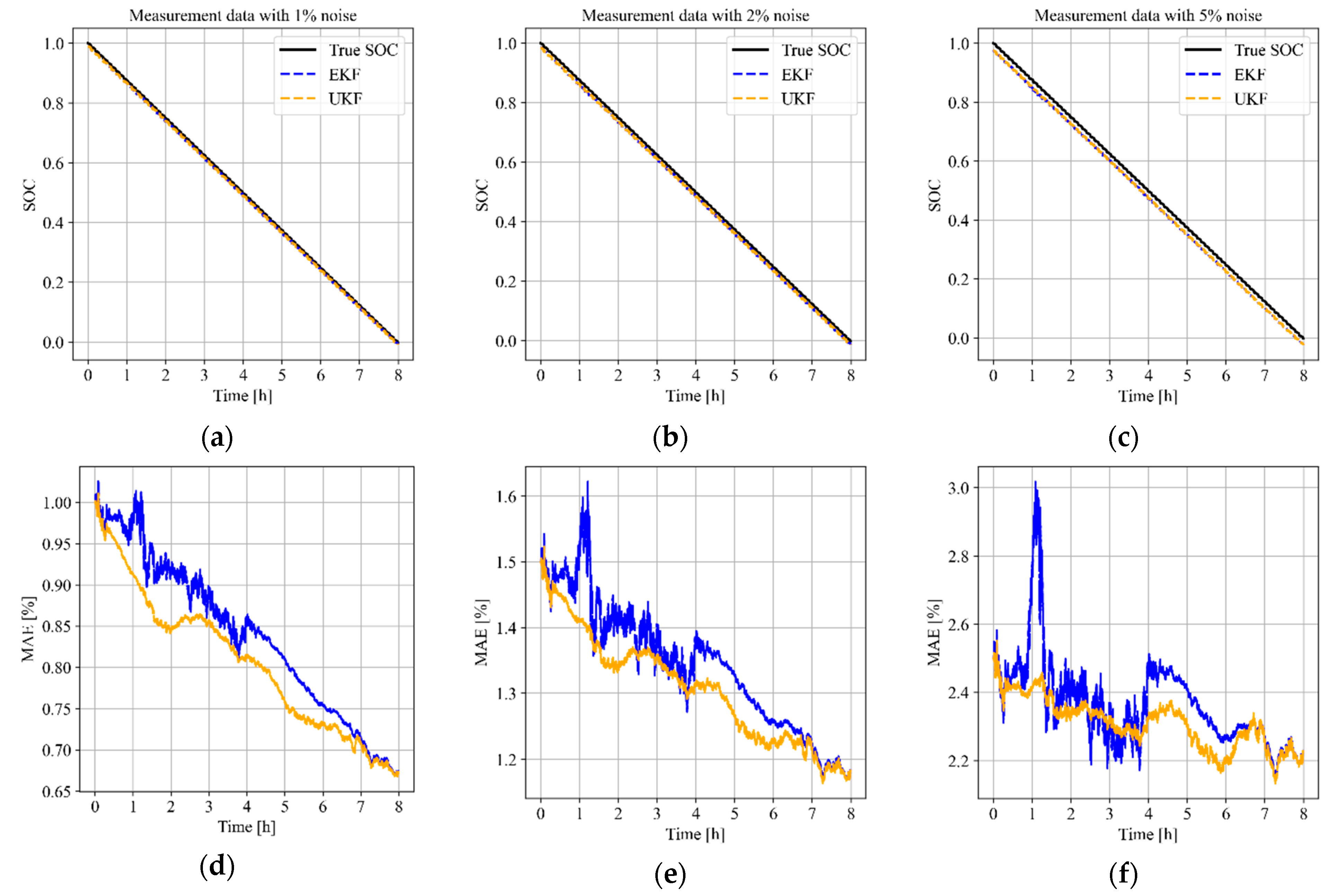
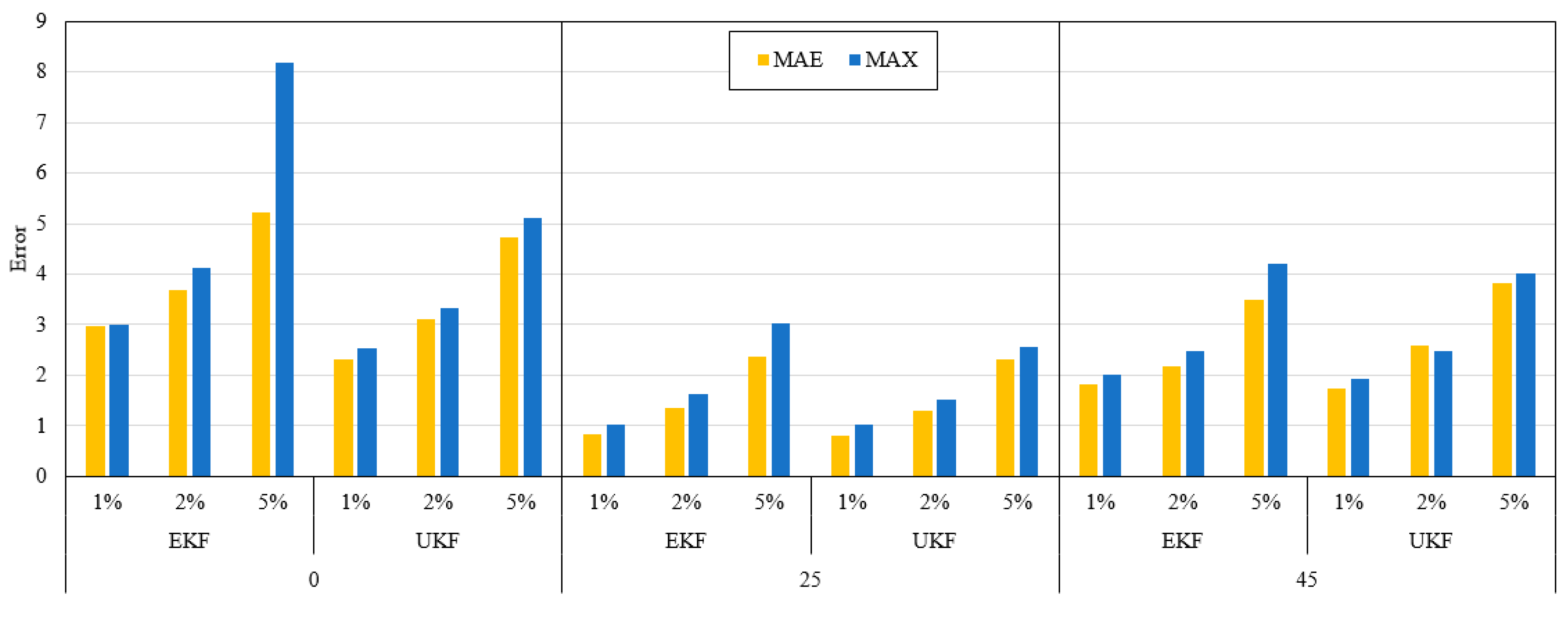
4.2. Results of SOC Estimation in Sensor Noise
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Budde-Meiwes, H.; Drillkens, J.; Lunz, B.; Muennix, J.; Rothgang, S.; Kowal, J.; Sauer, D.U. A Review of Current Automotive Battery Technology and Future Prospects. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2013, 227, 761–776. [Google Scholar] [CrossRef]
- Singh, K.V.; Bansal, H.O.; Singh, D. Hardware-in-the-Loop Implementation of ANFIS Based Adaptive SoC Estimation of Lithium-Ion Battery for Hybrid Vehicle Applications. J. Energy Storage 2020, 27, 101124. [Google Scholar] [CrossRef]
- Allam, A.; Catenaro, E.; Onori, S. Pushing the Envelope in Battery Estimation Algorithms. iScience 2020, 23, 101847. [Google Scholar] [CrossRef] [PubMed]
- Cittanti, D.; Ferraris, A.; Airale, A.; Fiorot, S.; Scavuzzo, S.; Carello, M. Modeling Li-Ion Batteries for Automotive Application: A Trade-Off Between Accuracy and Complexity. In Proceedings of the 2017 International Conference of Electrical and Electronic Technologies for Automotive, Torino, Italy, 15–16 June 2017; pp. 1–8. [Google Scholar] [CrossRef]
- Barreras, J.V.; Fleischer, C.; Christensen, A.E.; Swierczynski, M.; Schaltz, E.; Andreasen, S.J.; Sauer, D.U. An Advanced HIL Simulation Battery Model for Battery Management System Testing. IEEE Trans. Ind. Applicat. 2016, 52, 5086–5099. [Google Scholar] [CrossRef]
- Movassagh, K.; Arif Raihan, S.; Balasingam, B.; Member, S.; Pattipati, K. A Critical Look at Coulomb Counting Towards Improving the Kalman Filter Based State of Charge Tracking Algorithms in Rechargeable Batteries. Energies 2021, 14, 4074. [Google Scholar] [CrossRef]
- Hansen, T.; Wang, C.J. Support Vector Based Battery State of Charge Estimator. J. Power Sources 2005, 141, 351–358. [Google Scholar] [CrossRef]
- Yang, F.; Li, W.; Li, C.; Miao, Q. State-of-Charge Estimation of Lithium-Ion Batteries Based on Gated Recurrent Neural Network. Energy 2019, 175, 66–75. [Google Scholar] [CrossRef]
- Bhattacharjee, A.; Verma, A.; Mishra, S.; Saha, T.K. Estimating State of Charge for xEV Batteries Using 1D Convolutional Neural Networks and Transfer Learning. IEEE Trans. Veh. Technol. 2021, 70, 3123–3135. [Google Scholar] [CrossRef]
- Hossain Lipu, M.S.; Hussain, A.; Saad, M.H.M.; Ayob, A.; Hannan, M.A. Improved Recurrent NARX Neural Network Model for State of Charge Estimation of Lithium-Ion Battery Using Pso Algorithm. In Proceedings of the 2018 IEEE Symposium on Computer Applications & Industrial Electronics (ISCAIE), Penang Island, Malaysia, 28–29 April 2018; pp. 354–359. [Google Scholar] [CrossRef]
- He, H.; Xiong, R.; Zhang, X.; Sun, F.; Fan, J. State-of-Charge Estimation of the Lithium-Ion Battery Using an Adaptive Extended Kalman Filter Based on an Improved Thevenin Model. IEEE Trans. Veh. Technol. 2011, 60, 1461–1469. [Google Scholar] [CrossRef]
- Baccouche, I.; Jemmali, S.; Manai, B.; Omar, N.; Amara, N.E.B. Improved OCV Model of a Li-Ion NMC Battery for Online SOC Estimation Using the Extended Kalman Filter. Energies 2017, 10, 764. [Google Scholar] [CrossRef] [Green Version]
- Cui, X.; He, Z.; Li, E.; Cheng, A.; Luo, M.; Guo, Y. State-of-Charge Estimation of Power Lithium-Ion Batteries Based on an Embedded Micro Control Unit Using a Square Root Cubature Kalman Filter at Various Ambient Temperatures. Int. J. Energy Res. 2019, 43, 3561–3577. [Google Scholar] [CrossRef] [Green Version]
- He, Z.; Gao, M.; Wang, C.; Wang, L.; Liu, Y. Adaptive State of Charge Estimation for Li-Ion Batteries Based on an Unscented Kalman Filter with an Enhanced Battery Model. Energies 2013, 6, 4134–4151. [Google Scholar] [CrossRef] [Green Version]
- He, H.; Xiong, R.; Peng, J. Real-Time Estimation of Battery State-of-Charge with Unscented Kalman Filter and RTOS μCOS-II Platform. Appl. Energy 2016, 162, 1410–1418. [Google Scholar] [CrossRef]
- Shekar, A.; Anwar, S. Real-Time State-of-Charge Estimation via Particle Swarm Optimization on a Lithium-Ion Electrochemical Cell Model. Batteries 2019, 5, 4. [Google Scholar] [CrossRef] [Green Version]
- Li, W.; Rentemeister, M.; Badeda, J.; Jost, D.; Schulte, D.; Sauer, D.U. Digital twin for battery sustems: Cloud battery management system with online state-of-charge and state-of-health estimation. J. Energy 2020, 30, 2542–6605. [Google Scholar] [CrossRef]
- Mudaliar, M.D.; Sivakumar, N. IoT based real time energy monitoring system using Raspberry Pi. Internet Things 2020, 12, 100292. [Google Scholar] [CrossRef]
- Meng, J.; Luo, G.; Ricco, M.; Swierczynski, M.; Stroe, D.-I.; Teodorescu, R. Overview of Lithium-Ion Battery Modeling Methods for State-of-Charge Estimation in Electrical Vehicles. Appl. Sci. 2018, 8, 659. [Google Scholar] [CrossRef] [Green Version]
- Balasingam, B.; Pattipati, K.R. On the Identification of Electrical Equivalent Circuit Models Based on Noisy Measurements. IEEE Trans. Instrum. Meas. 2021, 70, 1–16. [Google Scholar] [CrossRef]
- He, H.; Xiong., R.; Fan., J. Evaluation of Lithium-Ion Battery Equivalent Circuit Models for State of Charge Estimation by an Experimental Approach. Energies 2011, 4, 582–598. [Google Scholar] [CrossRef]
- Song, M.; Gao, C.; Yan, H.; Yang, J. Thermal Battery Modeling of Inverter Air Conditioning for Demand Response. IEEE Trans. Smart Grid. 2018, 9, 5522–5534. [Google Scholar] [CrossRef]
- Farmann, A.; Sauer, D.U. A study on the dependency of the open-circuit voltage on temperature and actual aging state of lithium-ion batteries. J. Power Source 2017, 347, 1–13. [Google Scholar] [CrossRef]
- Zhang, L.; Peng, H.; Ning, Z.; Mu, Z.; Sun, C. Comparative Research on RC Equivalent Circuit Models for Lithium-Ion Batteries of Electric Vehicles. Appl. Sci. 2017, 7, 1002. [Google Scholar] [CrossRef] [Green Version]
- Wang, W.; Wang, X.; Xiang, C.; Wei, C.; Zhao, Y. Unscented Kalman Filter-Based Battery SOC Estimation and Peak Power Prediction Method for Power Distribution of Hybrid Electric Vehicles. IEEE Access 2018, 6, 35957–35965. [Google Scholar] [CrossRef]
- Wan, E.A.; Van Der Merwe, R. The Unscented Kalman Filter for Nonlinear Estimation. In Proceedings of the IEEE 2000 Adaptive Systems for Signal Processing, Communications, and Control Symposium (AS-SPCC), Lake Louise, AB, Canada, 1–4 October 2000; pp. 153–158. [Google Scholar] [CrossRef]
- Hunt, G. USABC Electric Vehicle Battery Test Procedures Manual; United States Department of Energy: Washington, DC, USA, 1996.
- Ni, K.; Ramanathan, N.; Chehade, M.N.H.; Balzano, L.; Nair, S.; Zahedi, S.; Kohler, E.; Pottie, G.; Hansen, M.; Srivastava, M. Sensor Network Data Fault Types. ACM Trans. Sens. Netw. 2009, 5, 1–29. [Google Scholar] [CrossRef] [Green Version]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Operating Temperature (°C) | MAE (%) | MAX (%) |
|---|---|---|
| 0 | 4.04 | 4.82 |
| 25 | 3.12 | 4.51 |
| 45 | 3.35 | 4.55 |
| Item | Specification |
|---|---|
| Standard Capacity | Min 4900 mAh |
| Cut-off Voltage | 2.5 V |
| Nominal Voltage | 3.6 V |
| Operation Temperature | Charge: 0 °C to 45 °C Discharge: −20 °C to 60 °C |
| Manufacturer | Samsung SDI |
| Item | Specification |
|---|---|
| CPU | ARM Cortex-A72 1.5 GHz |
| GPU | Broadcom VideoCoreVi 500 MHz |
| RAM | 4GB LPDDR4 |
| USB | Micro HDMI |
| Dimensions | 85.60 mm × 56.50 mm |
| Method | Unit Cell | 1 Pack (6 Cells) | 2 Pack (12 Cells) | |
|---|---|---|---|---|
| EKF | Time consumed [s] | 45 | 48 | 52 |
| Load rate [%] | 25.1 | 30.5 | 35.8 | |
| UKF | Time consumed [s] | 52 | 56 | 59 |
| Load rate [%] | 37.5 | 44.5 | 46.1 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hong, S.; Kang, M.; Park, H.; Kim, J.; Baek, J. Real-Time State-of-Charge Estimation Using an Embedded Board for Li-Ion Batteries. Electronics 2022, 11, 2010. https://doi.org/10.3390/electronics11132010
Hong S, Kang M, Park H, Kim J, Baek J. Real-Time State-of-Charge Estimation Using an Embedded Board for Li-Ion Batteries. Electronics. 2022; 11(13):2010. https://doi.org/10.3390/electronics11132010
Chicago/Turabian StyleHong, Seonri, Moses Kang, Hwapyeong Park, Jonghoon Kim, and Jongbok Baek. 2022. "Real-Time State-of-Charge Estimation Using an Embedded Board for Li-Ion Batteries" Electronics 11, no. 13: 2010. https://doi.org/10.3390/electronics11132010