
Active Disturbance Rejection Adaptive Control for Hydraulic Lifting Systems with Valve Dead-Zone

Abstract
:1. Introduction
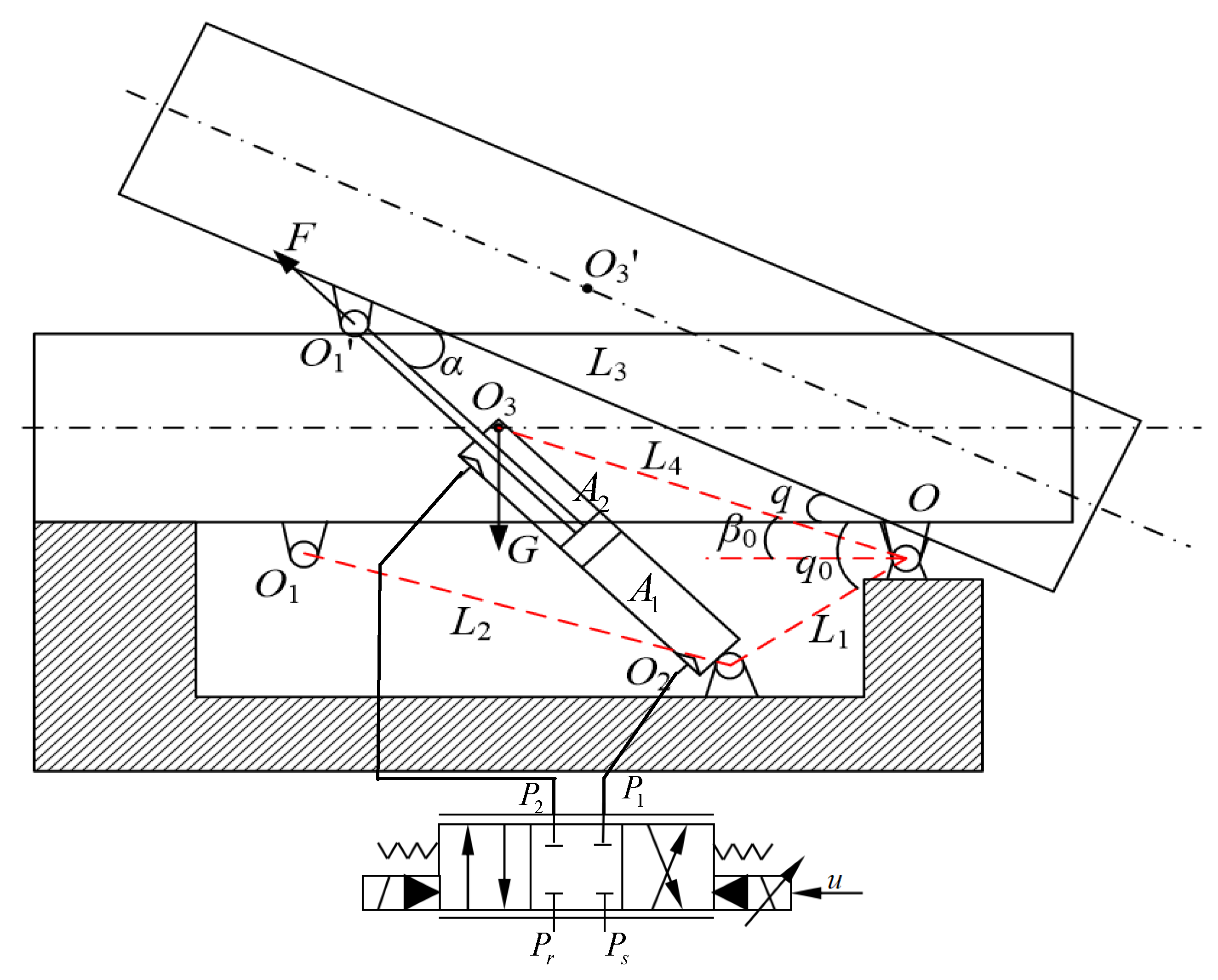
2. System Description
3. Controller Design
3.1. Discontinuous Mapping and Parameter Adaptive Law
3.2. Disturbance Observer Design
3.3. Controller Design
3.4. Stability Analysis
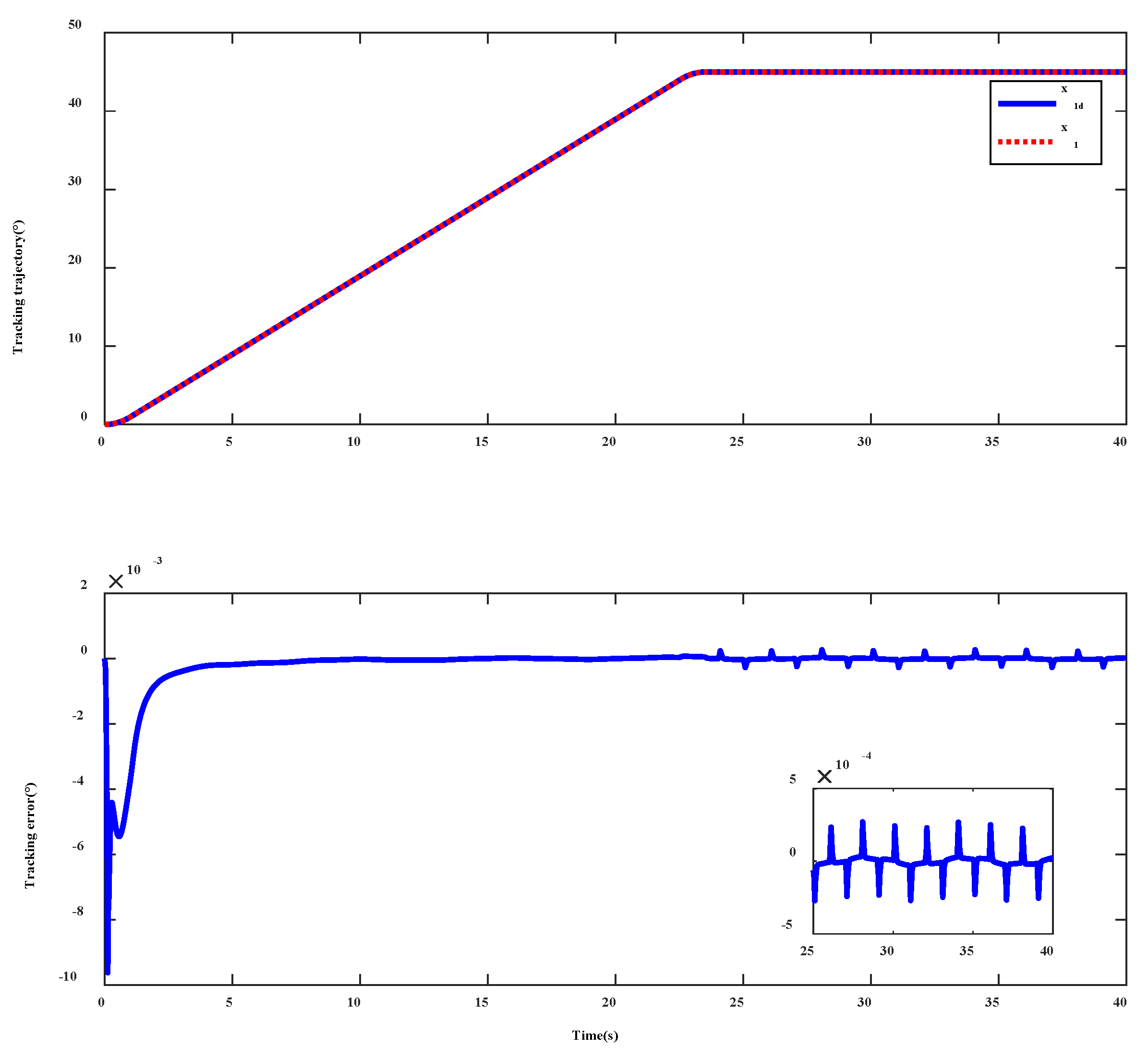
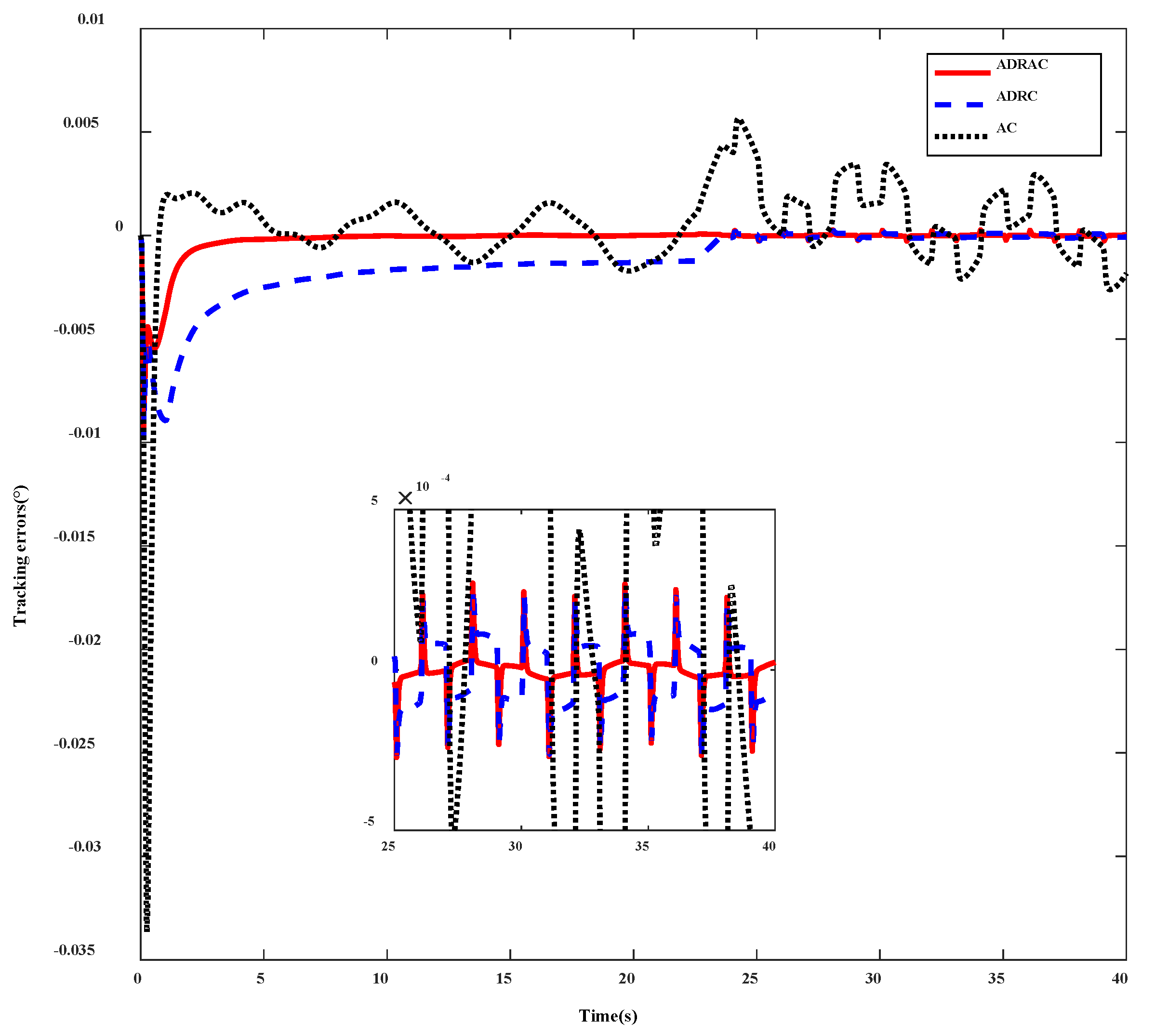
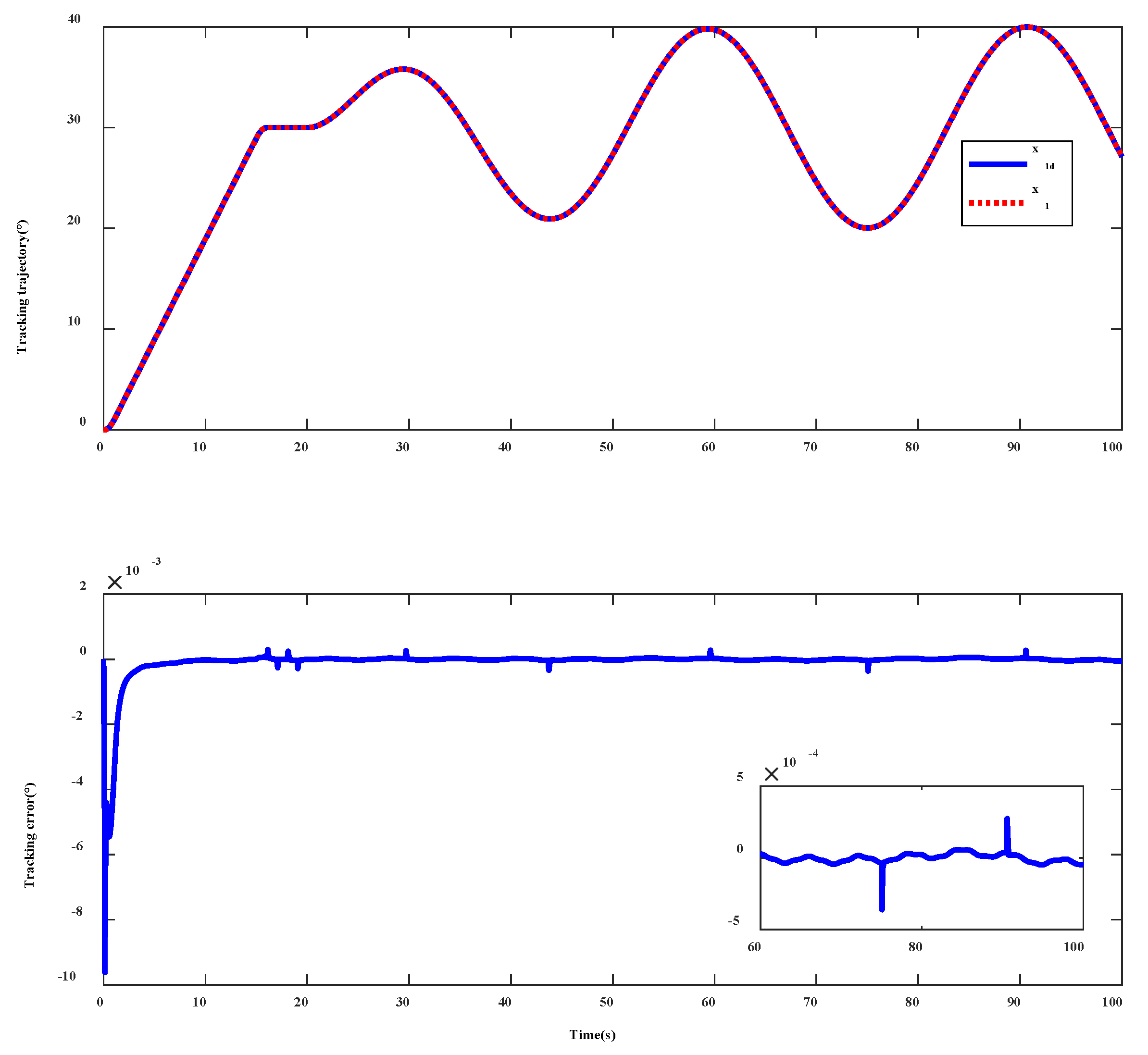
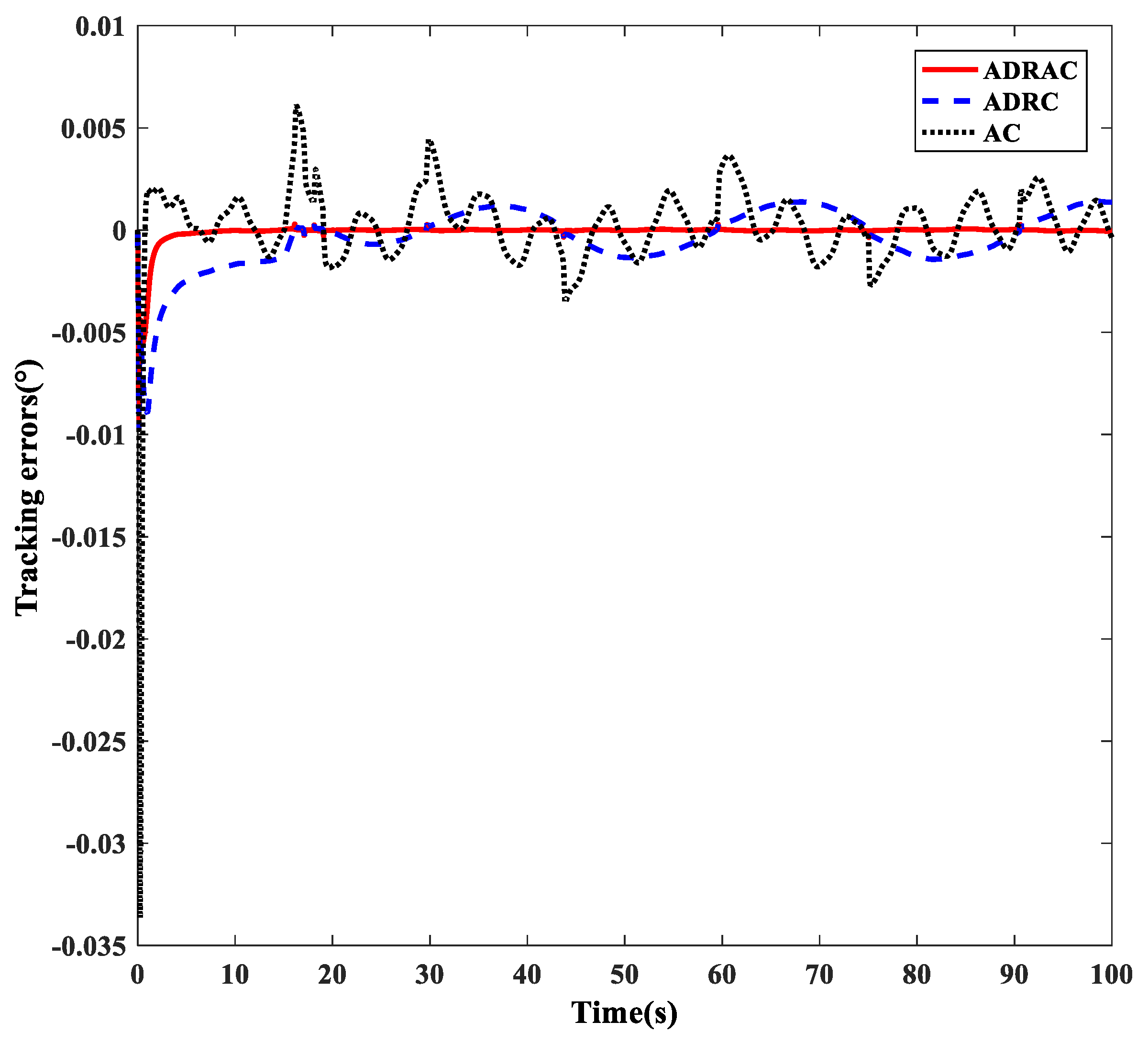
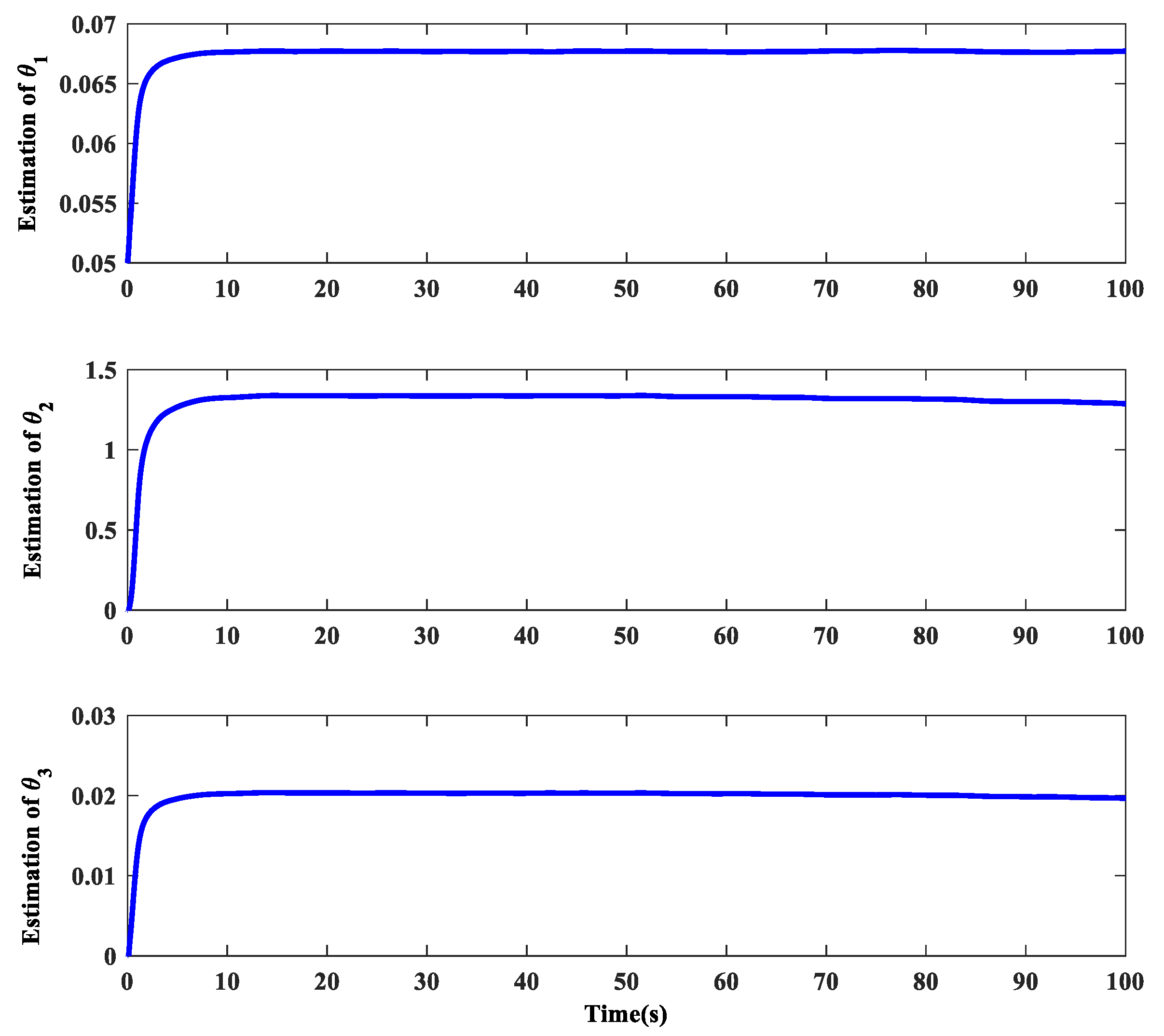
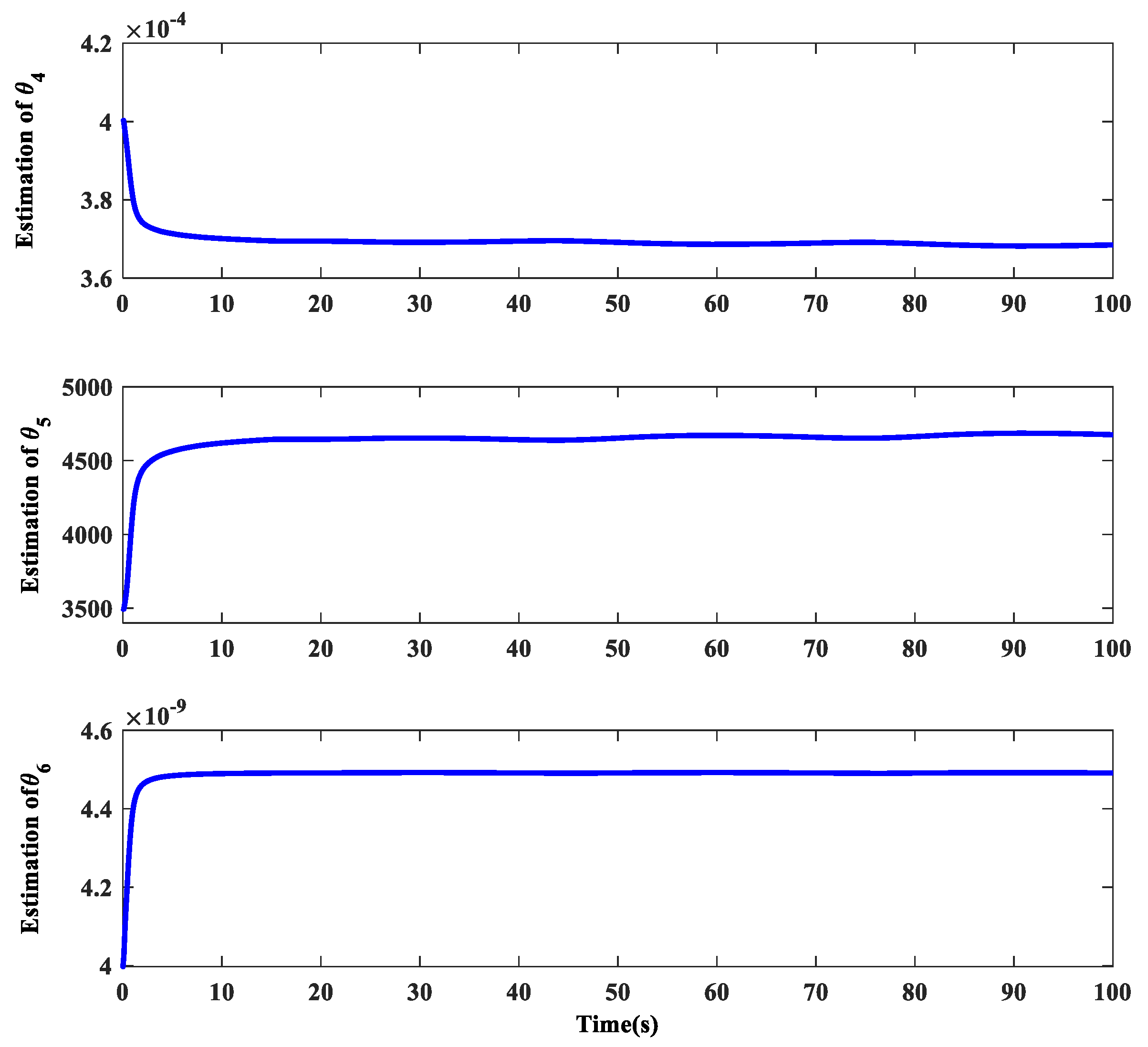
4. Simulation Results
- (1)
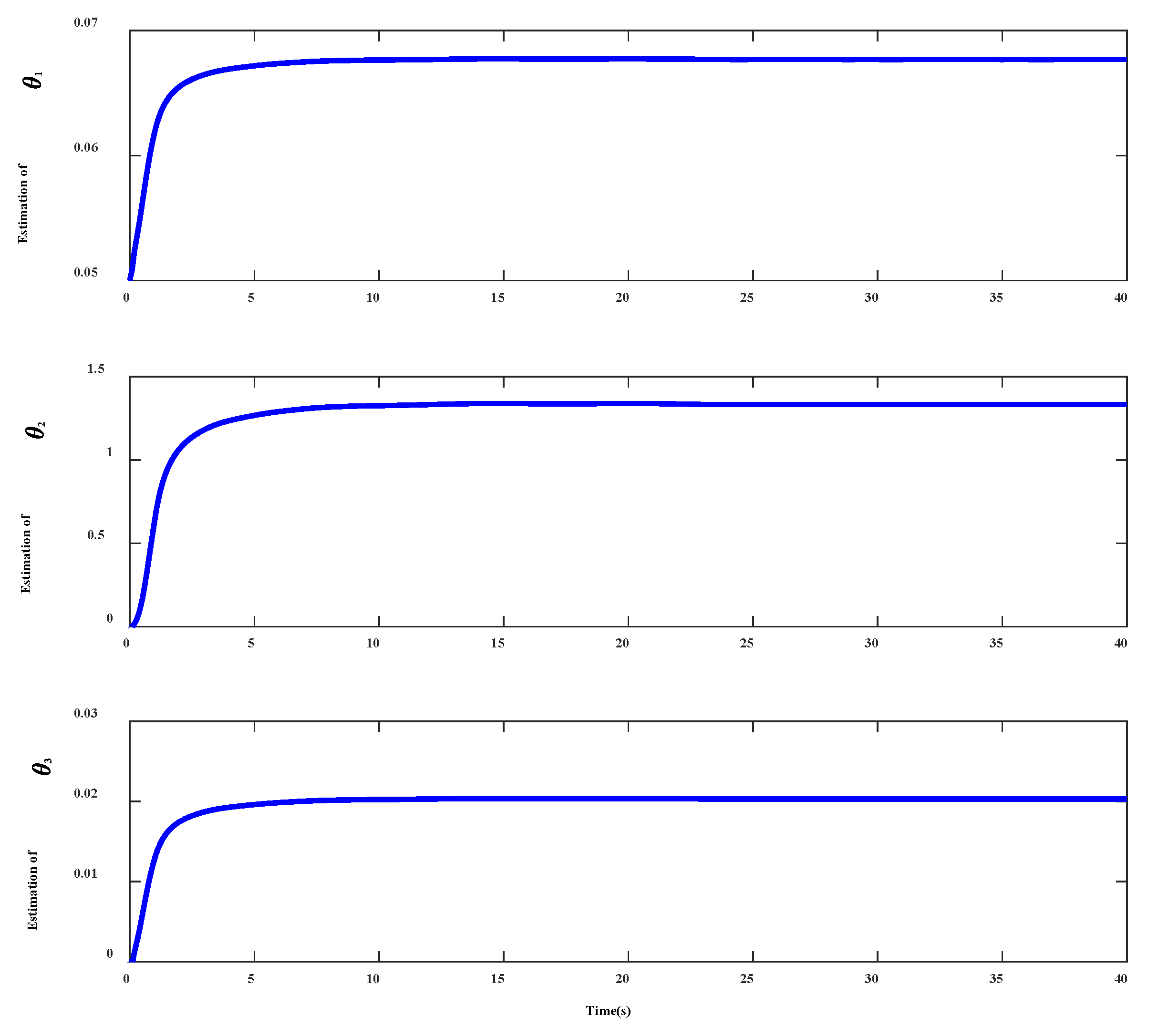
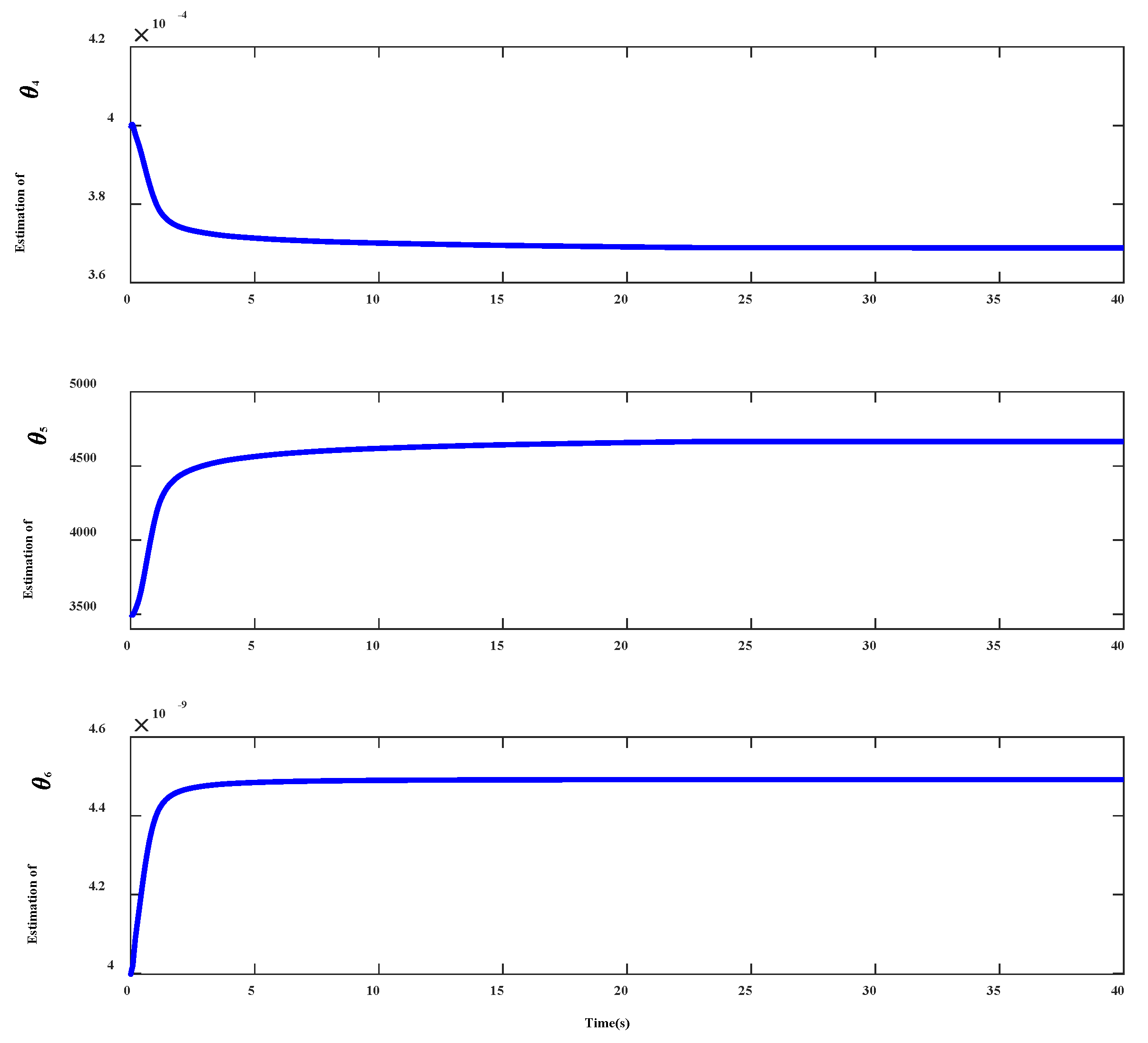
- ADRAC: This controller was introduced in Section 3, and the controller parameters were provided by , , , Γ = diag {1.1 × 10−4, 10.5, 4 × 10−3, 2.6 × 10−9, 1.8 × 106, 3.5 × 10−7}, a2 = 1, a3 = 0.01, c2 = 0.01, c3 = 0.01, ωo1 = 200, ωo2 = 200, θmax = [1, 10, 1, 1 × 10−2, 2 × 105, 1 × 10−7]T, and θmin = [0, 0, 0, 0, 1 × 102,−1 × 10−7]T. The initial parameter estimation values were set as .
- (2)
- ADRC: This is an active disturbance rejection control without parameter adaption. The difference between the ADRC and the ADRAC was that the parameter adaption matrix was set as in the ADRC. The other control parameters were the same as the ADRAC.
- (3)
- AC: This is an adaptive controller without disturbance compensation. The difference between the AC and the ADRAC was that the observer parameters were set as ωo1 = 0 and ωo2 = 0 in AC. The other control parameters were the same as the ADRAC.
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Lu, L.; Yao, B. Energy-Saving Adaptive Robust Control of a Hydraulic Manipulator Using Five Cartridge Valves with an Accumulator. IEEE Trans. Ind. Electron. 2014, 61, 7046–7054. [Google Scholar] [CrossRef]
- Yang, X.; Deng, W.; Yao, J. Neural Adaptive Dynamic Surface Asymptotic Tracking Control of Hydraulic Manipulators with Guaranteed Transient Performance. IEEE Trans. Neural Netw. Learn. Syst. 2022, 1–11. [Google Scholar] [CrossRef] [PubMed]
- Xu, C.; Liu, Y.; Ding, F.; Zhuang, Z. Recognition and Grasping of Disorderly Stacked Wood Planks Using a Local Image Patch and Point Pair Feature Method. Sensors 2020, 20, 6235. [Google Scholar] [CrossRef] [PubMed]
- Koivumaki, J.; Mattila, J. Stability-Guaranteed Force-Sensorless Contact Force/Motion Control of Heavy-Duty Hydraulic Manipulators. IEEE Trans. Robot. 2015, 31, 918–935. [Google Scholar] [CrossRef]
- Li, L.; Lin, Z.; Jiang, Y.; Yu, C.; Yao, J. Valve deadzone/backlash compensation for lifting motion control of hydraulic manipulators. Machines 2021, 9, 57. [Google Scholar] [CrossRef]
- Yang, X.; Deng, W.; Yao, J. Neural network based output feedback control for DC motors with asymptotic stability. Mech. Syst. Signal Process. 2022, 164, 108288. [Google Scholar] [CrossRef]
- Sun, W.; Pan, H.; Gao, H. Filter-Based Adaptive Vibration Control for Active Vehicle Suspensions with Electrohydraulic Actuators. IEEE Trans. Veh. Technol. 2016, 65, 4619–4626. [Google Scholar] [CrossRef]
- Yang, X.; Yao, J.; Deng, W. Output feedback adaptive super-twisting sliding mode control of hydraulic systems with disturbance compensation. ISA Trans. 2021, 109, 175–185. [Google Scholar] [CrossRef]
- Huang, Y.; Pool, D.M.; Stroosma, O.; Chu, Q. Long-stroke hydraulic robot motion control with incremental nonlinear dynamic inversion. IEEE/ASME Trans. Mechatron. 2019, 24, 304–314. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Yan, X.; Zhang, X.; Li, J.; Cheng, F. Effects of inhomogeneity on rolling contact fatigue life in elastohydrodynamically lubricated point contacts. Ind. Lubr. Tribol. 2019, 71, 697–701. [Google Scholar] [CrossRef]
- Kim, W.; Won, D.; Tomizuka, M. Flatness-Based Nonlinear Control for Position Tracking of Electrohydraulic Systems. IEEE/ASME Trans. Mechatron. 2014, 20, 197–206. [Google Scholar] [CrossRef]
- Choi, Y.-S.; Choi, H.H.; Jung, J.-W. Feedback Linearization Direct Torque Control with Reduced Torque and Flux Ripples for IPMSM Drives. IEEE Trans. Power Electron. 2016, 31, 3728–3737. [Google Scholar] [CrossRef]
- Yao, B.; Al-Majed, M.; Tomizuka, M. High-performance robust motion control of machine tools: An adaptive robust control approach and comparative experiments. IEEE/ASME Trans. Mechatron. 1997, 2, 63–76. [Google Scholar]
- Yao, B.; Bu, F.; Reedy, J.; Chiu, G.T.C. Adaptive robust motion control of single-rod hydraulic actuators: Theory and experiments. IEEE/ASME Trans. Mechatron. 2000, 5, 79–91. [Google Scholar]
- Lyu, L.; Chen, Z.; Yao, B. Advanced valves and pump coordinated hydraulic control design to simultaneously achieve high accuracy and high efficiency. IEEE Trans. Control. Syst. Technol. 2021, 29, 236–248. [Google Scholar] [CrossRef]
- Yang, X.; Ge, Y.; Deng, W.; Yao, J. Adaptive dynamic surface tracking control for uncertain full-state constrained nonlinear systems with disturbance compensation. J. Frankl. Inst. 2022, 359, 2424–2444. [Google Scholar] [CrossRef]
- Deng, W.; Yao, J.; Ma, D. Time-varying input delay compensation for nonlinear systems with additive disturbance: An output feedback approach. Int. J. Robust Nonlinear Control 2018, 28, 31–52. [Google Scholar] [CrossRef]
- Deng, W.; Yao, J. Asymptotic tracking control of mechanical servosystems with mismatched uncertainties. IEEE/ASME Trans. Mechatron. 2021, 26, 2204–2214. [Google Scholar] [CrossRef]
- Deng, W.; Yao, J.; Wang, Y.; Yang, X.; Chen, J. Output feedback backstepping control of hydraulic actuators with valve dynamics compensation. Mech. Syst. Signal Process. 2021, 158, 107769. [Google Scholar] [CrossRef]
- Ge, Y.; Yang, X.; Deng, W.; Yao, J. Rise-based composite adaptive control of electro-hydrostatic actuator with asymptotic stability. Machines 2021, 9, 181. [Google Scholar] [CrossRef]
- Xiong, T.; Gu, Z.; Yi, J.; Pu, Z. Fixed-Time Adaptive Observer-Based Time-Varying Formation Control for Multi-Agent Systems with Directed Topologies. Neurocomputing 2021, 463, 483–494. [Google Scholar] [CrossRef]
- Won, D.; Kim, W.; Tomizuka, M. High-gain-observer-based integral sliding mode control for position tracking of electrohydraulic servo systems. IEEE/ASME Trans. Mechatron. 2017, 22, 2695–2704. [Google Scholar] [CrossRef]
- Rath, J.J.; Defoort, M.; Karimi, H.R.; Veluvolu, K.C. Output Feedback Active Suspension Control with Higher Order Terminal Sliding Mode. IEEE Trans. Ind. Electron. 2017, 64, 1392–1403. [Google Scholar] [CrossRef]
- Yao, J.; Jiao, Z.; Ma, D. Extended-state-observer-based output feedback nonlinear robust control of hydraulic systems with backstepping. IEEE Trans. Ind. Electron. 2014, 61, 6285–6293. [Google Scholar] [CrossRef]
- Wang, S.; Tao, L.; Chen, Q.; Na, J.; Ren, X. USDE-Based Sliding Mode Control for Servo Mechanisms with Unknown System Dynamics. IEEE/ASME Trans. Mechatron. 2020, 25, 1056–1066. [Google Scholar] [CrossRef]
- Ba, D.X.; Dinh, T.Q.; Bae, J.; Ahn, K.K. An Effective Disturbance-Observer-Based Nonlinear Controller for a Pump-Controlled Hydraulic System. IEEE/ASME Trans. Mechatron. 2020, 25, 32–43. [Google Scholar] [CrossRef]
- Deng, W.; Yao, J. Extended-State-Observer-Based Adaptive Control of Electrohydraulic Servomechanisms without Velocity Measurement. IEEE/ASME Trans. Mechatron. 2020, 25, 1151–1161. [Google Scholar] [CrossRef]
- Merritt, H. Hydraulic Control Systems; John Wiley & Sons: Hoboken, NJ, USA, 1967. [Google Scholar]
- Deng, W.; Yao, J.; Ma, D. Robust adaptive precision motion control of hydraulic actuators with valve dead-zone compensation. ISA Trans. 2017, 70, 269–278. [Google Scholar] [CrossRef]
- Yao, J.; Jiao, Z.; Ma, D.; Yan, L. High-accuracy tracking control of hydraulic rotary actuators with modeling uncertainties. IEEE/ASME Trans. Mechatron. 2014, 19, 633–641. [Google Scholar] [CrossRef]
- Krstic, M.; Kanellakopoulos, I.; Kokotovic, P. Nonlinear and Adaptive Control Design; Wiley: New York, NY, USA, 1995. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| m (kg) | 10,000 | ) | 2.5 × 105 |
| ) | 1.5 × 105 | ) | 3 × 103 |
| Ps (Pa) | 2.1 × 106 | ) | 7.937× 10−8 |
| Pr (Pa) | 0 | (Pa) | 7 × 108 |
| A1 (m2) | 3.14 × 10−2 | ) | 9.6 × 10−13 |
| A2 (m2) | 1.6 × 10−2 | L1 (m) | 1.6 |
| V01 (m3) | 3.1416 × 10−4 | L2 (m) | 2 |
| V02 (m3) | 3.04 × 10−2 | L3 (m) | 3.5 |
| g (m/s2) | 9.8 | L4 (m) | 3 |
| (rad) | 0.2648 | (rad) | 0.2618 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, F.; Zhou, H.; Deng, W. Active Disturbance Rejection Adaptive Control for Hydraulic Lifting Systems with Valve Dead-Zone. Electronics 2022, 11, 1788. https://doi.org/10.3390/electronics11111788
Yang F, Zhou H, Deng W. Active Disturbance Rejection Adaptive Control for Hydraulic Lifting Systems with Valve Dead-Zone. Electronics. 2022; 11(11):1788. https://doi.org/10.3390/electronics11111788
Chicago/Turabian StyleYang, Fengbo, Hongping Zhou, and Wenxiang Deng. 2022. "Active Disturbance Rejection Adaptive Control for Hydraulic Lifting Systems with Valve Dead-Zone" Electronics 11, no. 11: 1788. https://doi.org/10.3390/electronics11111788