
Optimization of a 3D-Printed Permanent Magnet Coupling Using Genetic Algorithm and Taguchi Method

 , , ,
, , ,  ,
,  and
and 
Abstract
:1. Introduction
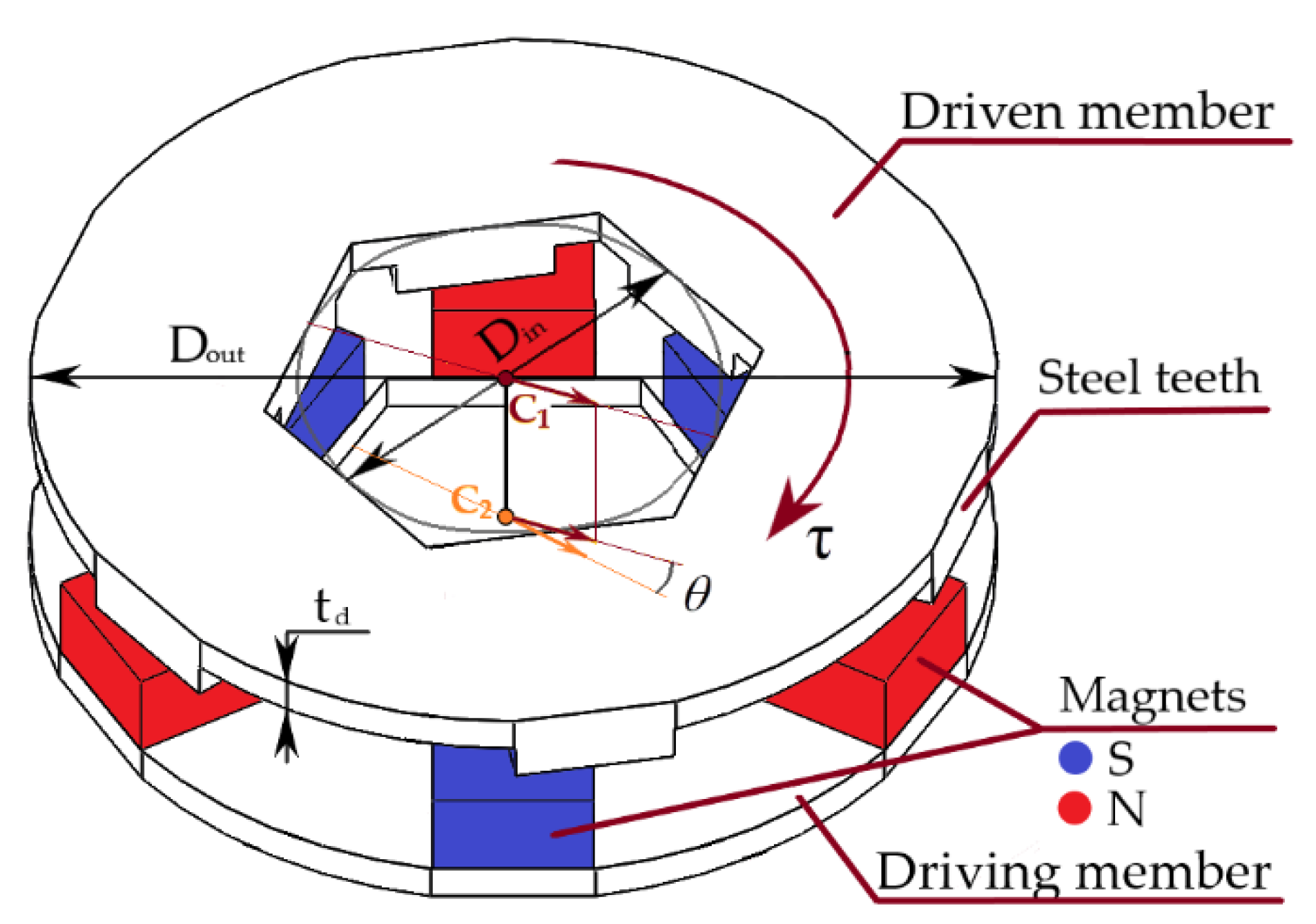
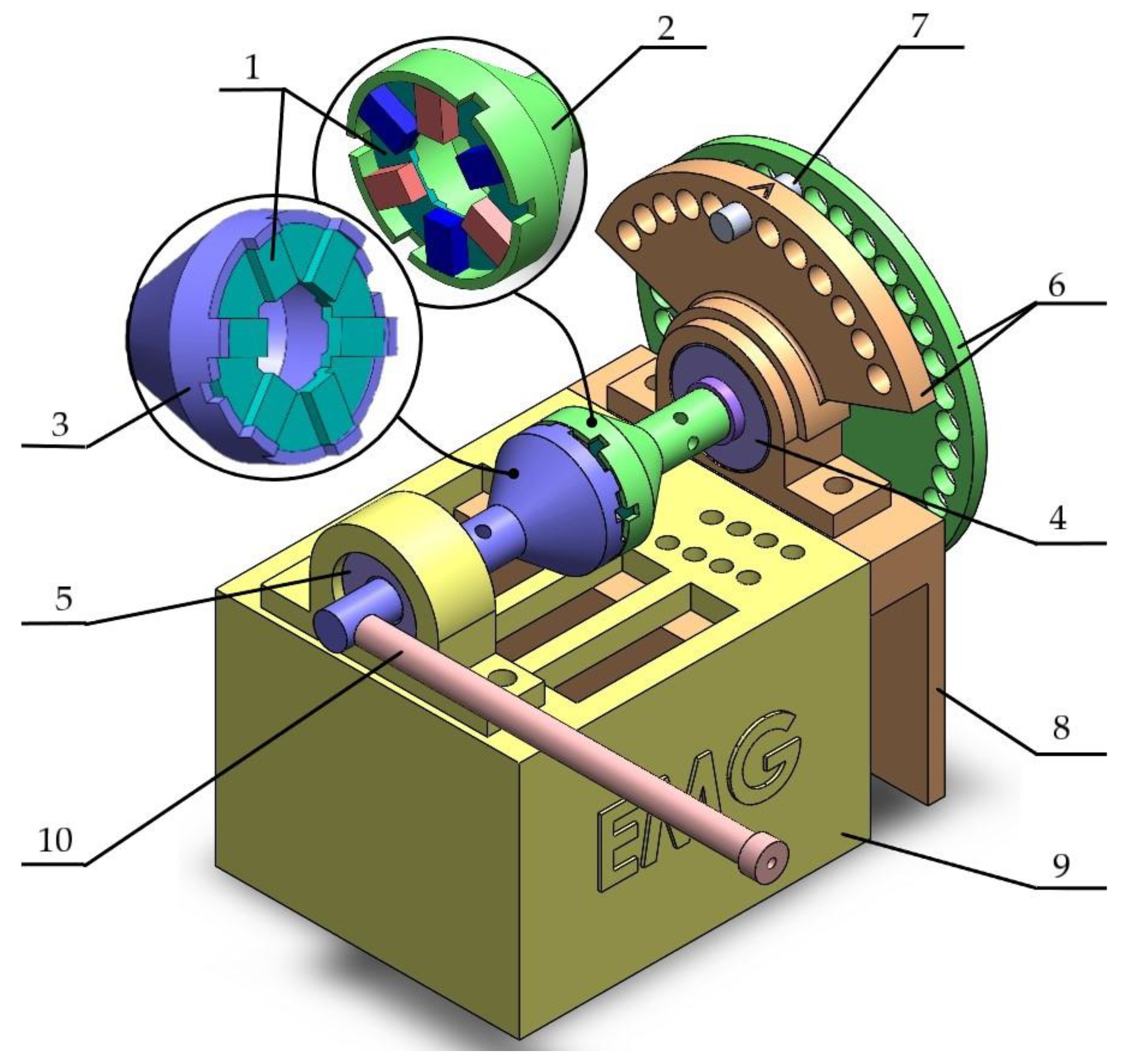
2. Permanent Magnet Coupling Design
3. Permanent Magnet Coupling Optimization Model
4. Optimization Using Genetic Algorithm
4.1. Genetic Algorithm
- The term “gene” implies an optimization parameter;
- The term “individual” defines a set of optimization parameters;
- The term “population” presents a group of different parameter sets.
| Algorithm 1 MOGA | |
| 1: | Initialize Population; |
| 2: | Evaluate Objective Values; |
| 3: | Assign Rank based on Pareto Dominance; |
| 4: | Compute Niche Count; |
| 5: | Assign Linearly Scaled Fitness; |
| 6: | Assign Shared Fitness; |
| 7: | fori = 1 to number of Generations do; |
| 8: | Tournament Selection; |
| 9: | Single-Point Crossover; |
| 10: | Uniform Mutation; |
| 11: | Evaluate Objective Values; |
| 12: | Assign Rank based on Pareto Dominance; |
| 13: | Compute Niche Count; |
| 14: | Assign Linearly Scaled Fitness; |
| 15: | Assign Shared Fitness; |
| 16: | end. |
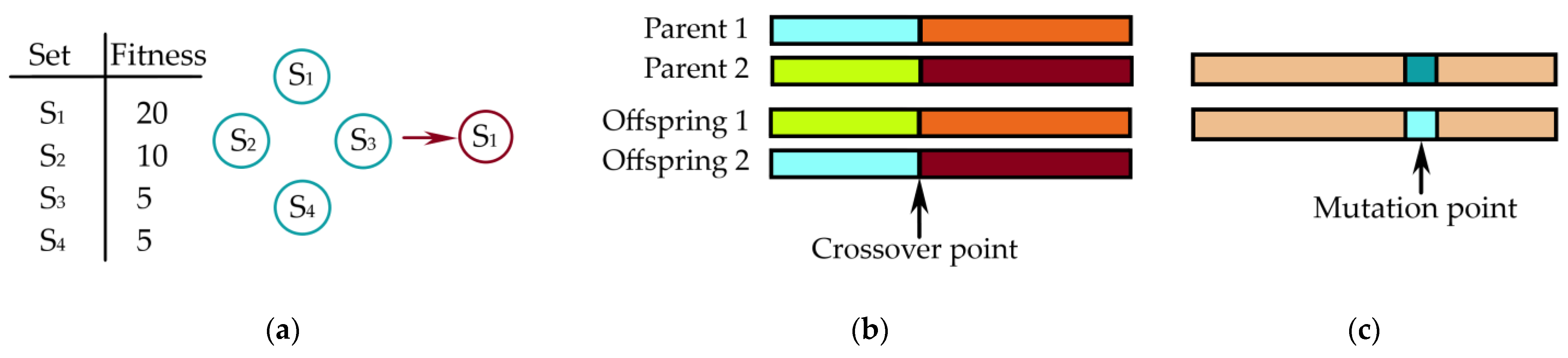
- The selection operator selects individuals from the current population based on their fitness values; the selected individuals are called “parents”;
- The crossover operator is applied to the “parents” to create new individuals called “offspring”;
- The mutation operator broadens the search space by making changes in the current population; then, the “offspring” and mutated individuals form a new generation.
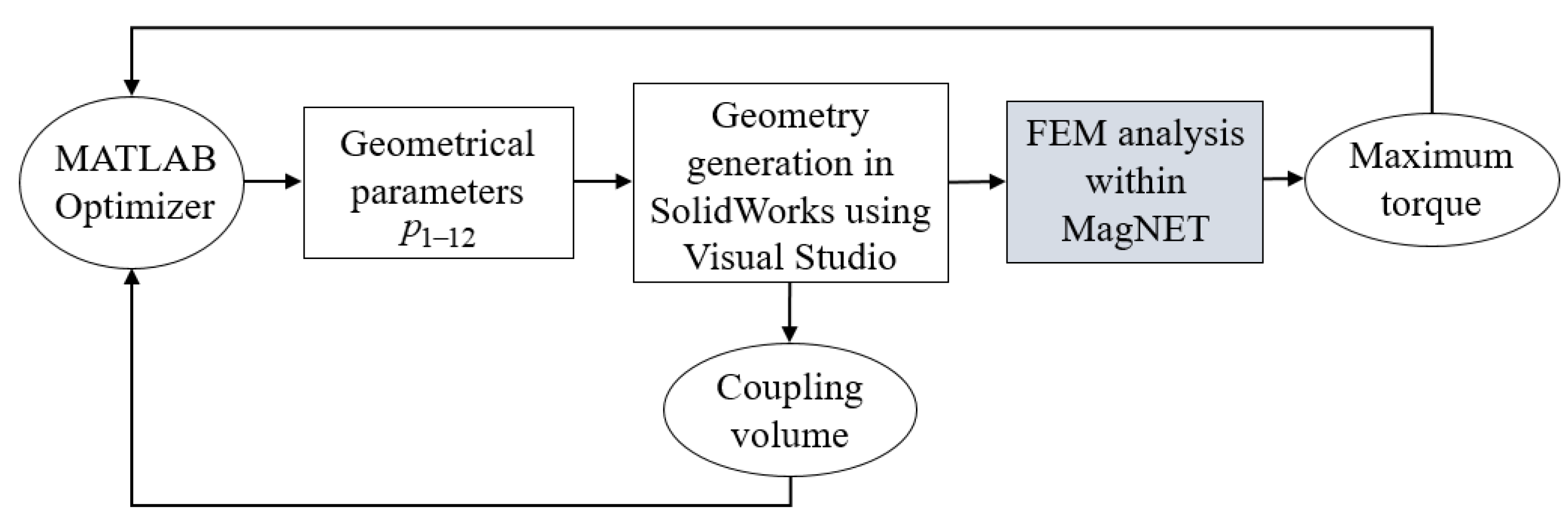
4.2. Optimization Method
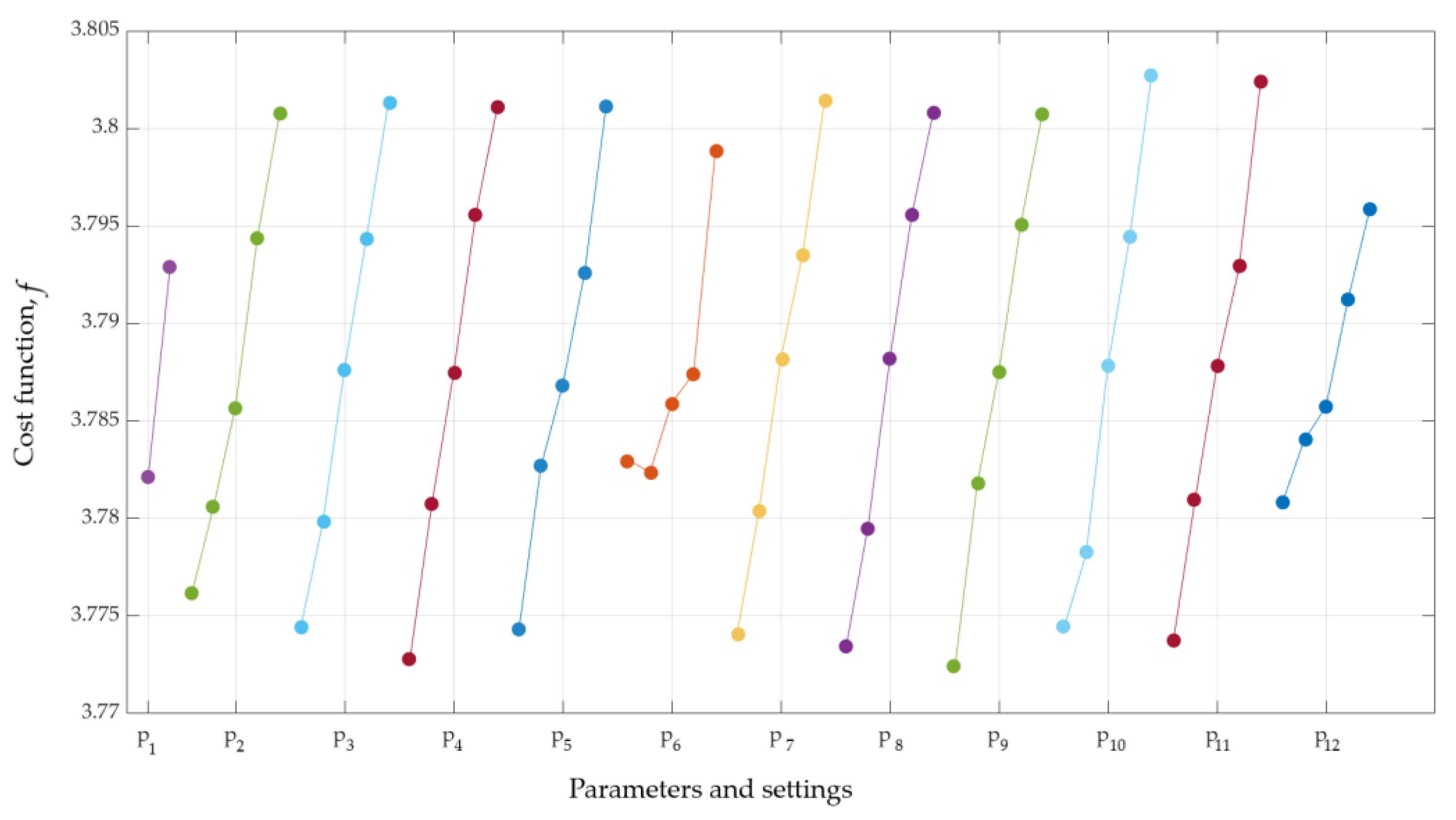
4.3. Simulation Results of the GA Optimization
5. Optimization Using Taguchi Method
5.1. Taguchi Methodology
5.2. Conducting the Taguchi Experiments
5.3. Simulation Results of the Taguchi Optimization
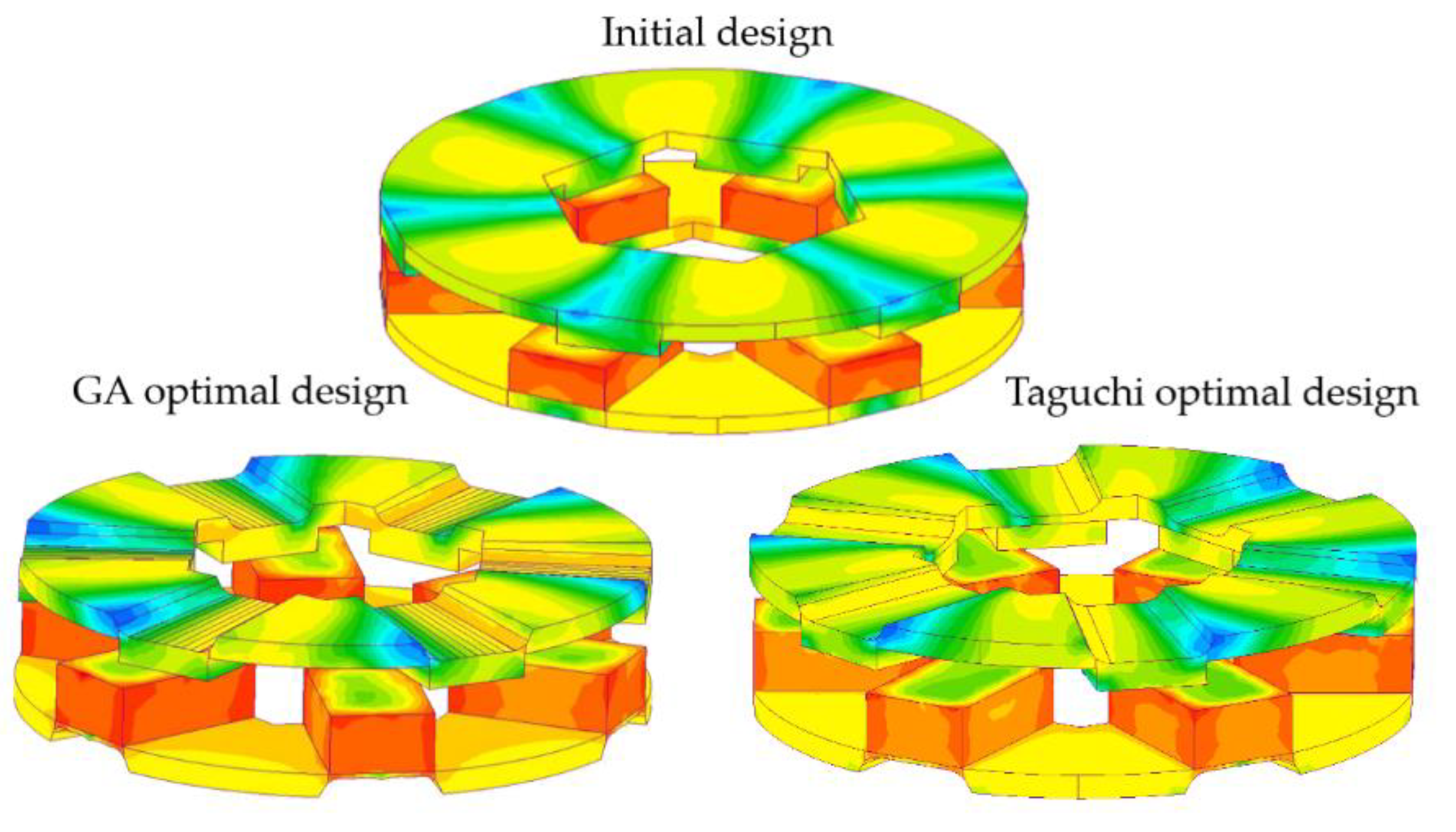
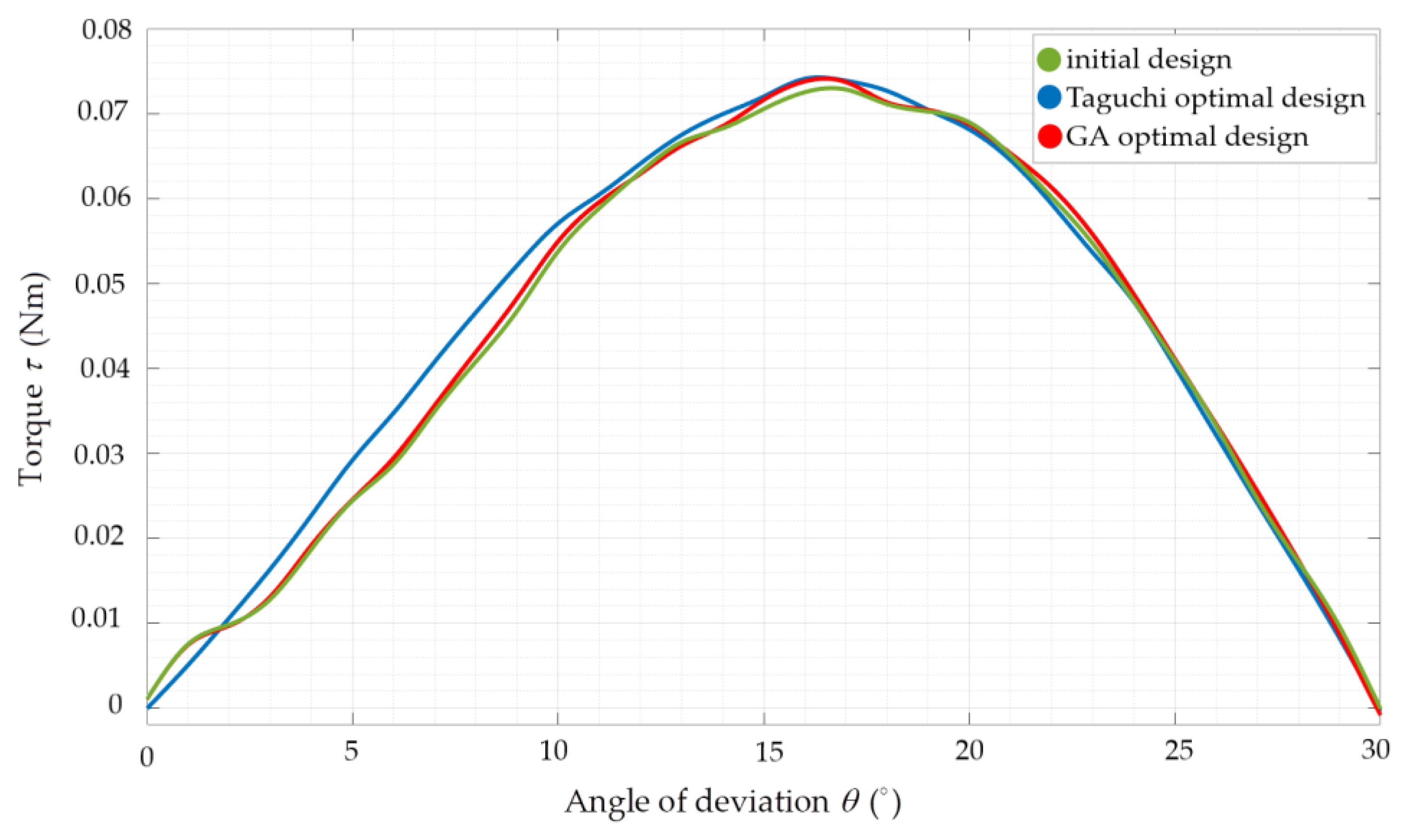
6. Comparison of the Simulation Results of the GA Optimization and the Taguchi Optimization
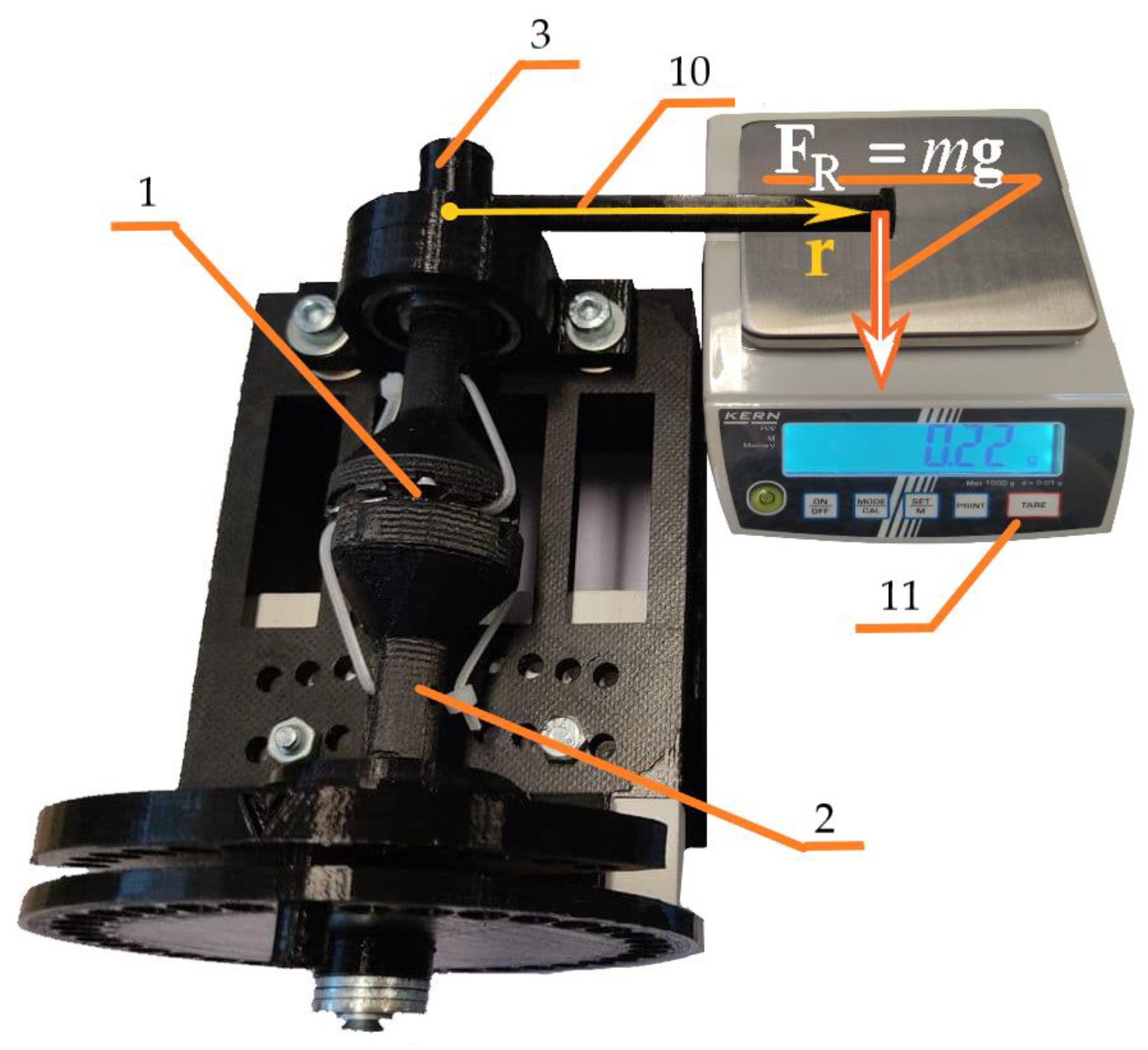
7. Experimental Setup
7.1. Test Bench
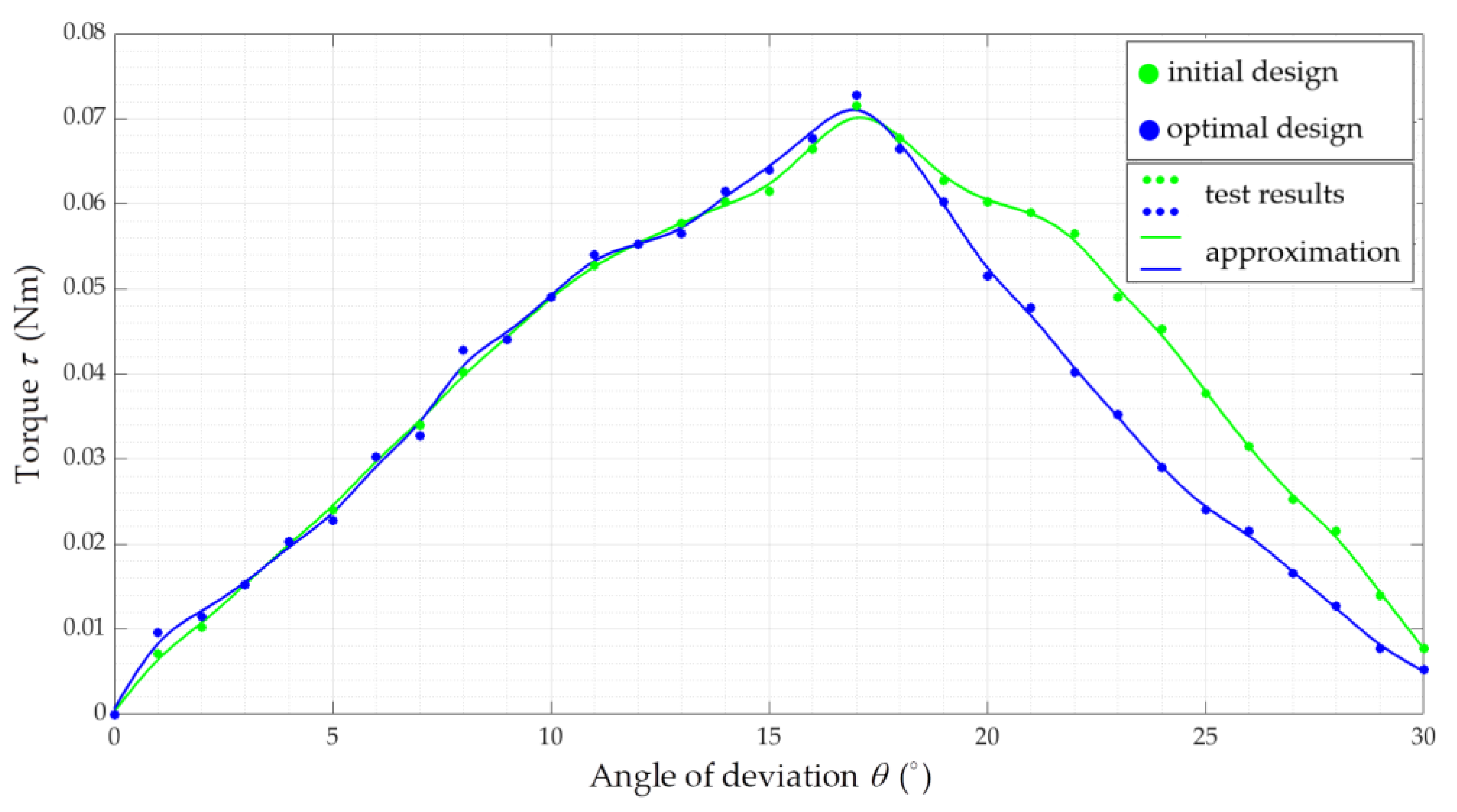
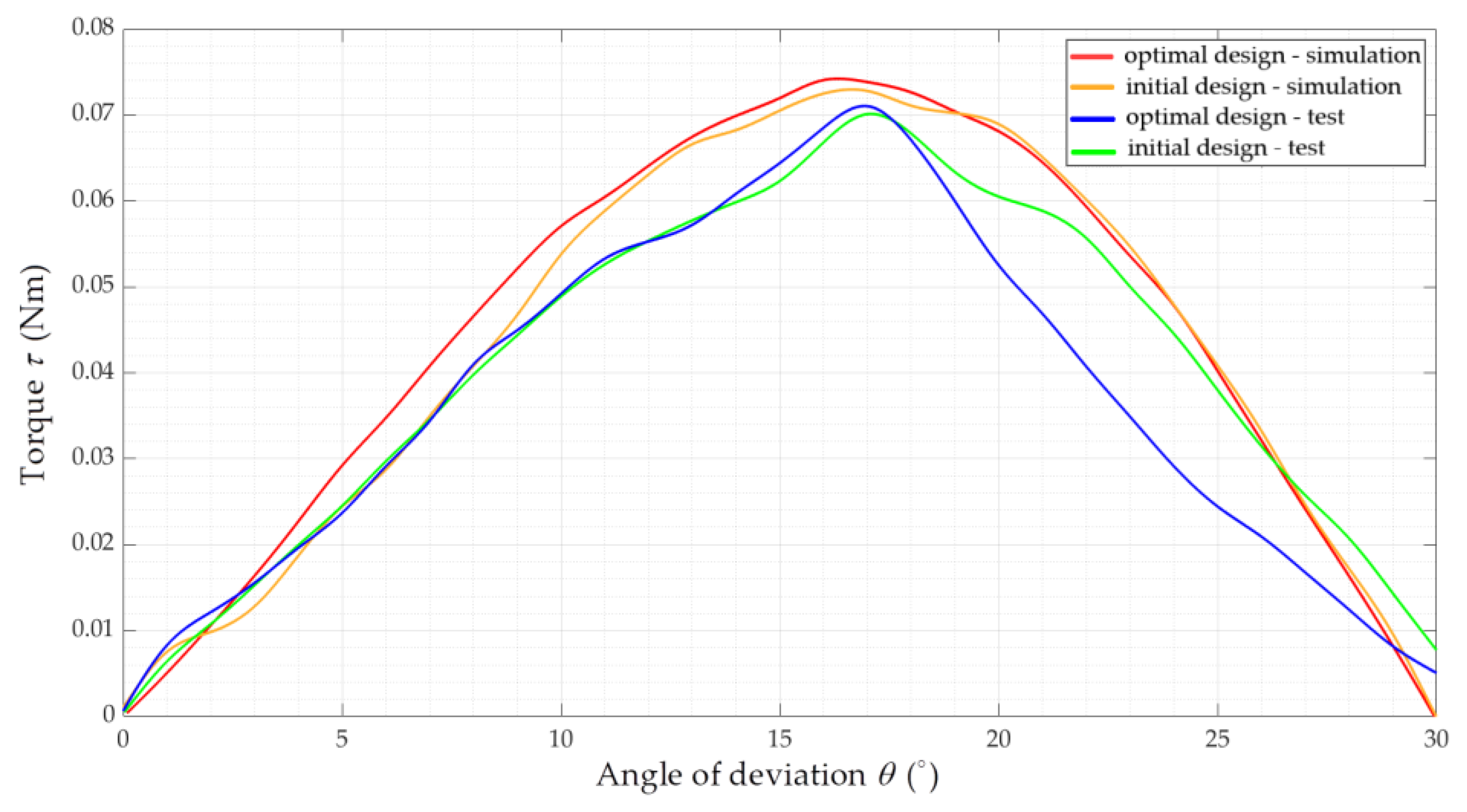
7.2. Experimental Results
8. Discussion and Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- El-Wakeel, A.S. Design optimization of PM couplings using hybrid Particle Swarm Optimization-Simplex Method (PSO-SM) Algorithm. Electr. Power Syst. Res. 2014, 116, 29–35. [Google Scholar] [CrossRef]
- Andriushchenko, E.; Kaska, J.; Kallaste, A.; Belahcen, A.; Vaimann, T.; Rassõlkin, A. Design Optimization of Permanent Magnet Clutch with Ārtap Framework. TechRxiv 2021, in press. [Google Scholar]
- Charpentier, J.F.; Lemarquand, G. Optimal design of cylindrical air-gap synchronous permanent magnet couplings. IEEE Trans. Magn. 1999, 35, 1037–1046. [Google Scholar] [CrossRef]
- Hornreich, R.M.; Shtrikman, S. Optimal design of synchronous torque couplers. IEEE Trans. Magn. 1978, 14, 800–802. [Google Scholar] [CrossRef]
- Zhang, B.; Wan, Y.; Li, Y.; Feng, G. Optimized design research on adjustable-speed permanent magnet coupling. In Proceedings of the IEEE International Conference on Industrial Technology, Cape Town, Western Cape, South Africa, 25–28 February 2013; pp. 380–385. [Google Scholar]
- Buchanan, C.; Gardner, L. Metal 3D printing in construction: A review of methods, research, applications, opportunities and challenges. Eng. Struc. 2019, 180, 332–348. [Google Scholar] [CrossRef]
- Frazier, W.E. Metal additive manufacturing: A review. J. Mat. Eng. Perform. 2014, 23, 1917–1928. [Google Scholar] [CrossRef]
- Zhang, Z.Y.; Jhong, K.J.; Cheng, C.W.; Huang, P.W.; Tsai, M.C.; Lee, W.H. Metal 3D printing of synchronous reluctance motor. In Proceedings of the IEEE International Conference on Industrial Technology, Taipei, Taiwan, 14–17 March 2016; pp. 1125–1128. [Google Scholar]
- Wrobel, R.; Mecrow, B. A Comprehensive Review of Additive Manufacturing in Construction of Electrical Machines. IEEE Trans. Energy Convers. 2020, 35, 1054–1064. [Google Scholar] [CrossRef] [Green Version]
- Lei, G.; Zhu, J.; Guo, Y.; Liu, C.; Ma, B. A review of design optimization methods for electrical machines. Energies 2017, 10, 1962. [Google Scholar] [CrossRef] [Green Version]
- Duan, Y.; Ionel, D.M. A review of recent developments in electrical machine design optimization methods with a permanent magnet synchronous motor benchmark study. In Proceedings of the IEEE Energy Conversion Congress and Exposition: Energy Conversion Innovation for a Clean Energy Future, ECCE 2011, Rostock, Germany, 24–26 August 2011; pp. 3694–3701. [Google Scholar]
- López-Torres, C.; Espinosa, A.G.; Riba, J.R.; Romeral, L. Design and optimization for vehicle driving cycle of rare-earth-free SynRM based on coupled lumped thermal and magnetic networks. IEEE Trans. Veh. Technol. 2018, 67, 196–205. [Google Scholar] [CrossRef]
- Babetto, C.; Bacco, G.; Bianchi, N. Synchronous Reluctance Machine Optimization for High-Speed Applications. IEEE Trans. Energy Convers. 2018, 33, 1266–1273. [Google Scholar] [CrossRef]
- Cupertino, F.; Pellegrino, G.; Gerada, C. Design of synchronous reluctance motors with multiobjective optimization algorithms. IEEE Trans. Ind. Appl. 2014, 50, 3617–3627. [Google Scholar] [CrossRef] [Green Version]
- Pellegrino, G.; Cupertino, F.; Gerada, C. Automatic Design of Synchronous Reluctance Motors Focusing on Barrier Shape Optimization. IEEE Trans. Ind. Appl. 2015, 51, 1465–1474. [Google Scholar] [CrossRef]
- Andriushchenko, E.A.; Kallaste, A.; Belahcen, A.; Heidari, H.; Vaimann, T.; Rassõlkin, A. Design Optimization of Permanent Magnet Clutch. In Proceedings of the International Conference on Electrical Machines (ICEM), Gothenburg, Sweden, 23–26 August 2020. [Google Scholar]
- Jensen, M.T. Reducing the Run-Time Complexity of Multiobjective EAs: The NSGA-II and Other Algorithms. IEEE Trans. Evol. Comput. 2003, 7, 503–515. [Google Scholar] [CrossRef]
- Smith, J.E.; Fogarty, T.C. Operator and parameter adaptation in genetic algorithms. Soft Comput. 1997, 1, 81–87. [Google Scholar] [CrossRef] [Green Version]
- Lamont, G.B.; Coello, C.A.C.; Van Veldhuizen, D.A. Evolutionary Algorithms for Solving Multi-Objective Problems; Springer: New York, NY, USA, 2007. [Google Scholar]
- Hwang, C.C.; Lyu, L.Y.; Liu, C.T.; Li, P.L. Optimal design of an SPM motor using genetic algorithms and Taguchi method. IEEE Trans. Magn. 2008, 44, 4325–4328. [Google Scholar] [CrossRef]
- Sorgdrager, A.; Wang, R.J.; Grobler, A. Taguchi method in electrical machine design. SAIEE Africa Res. J. 2017, 108, 150–164. [Google Scholar] [CrossRef] [Green Version]
- Yang, B.Y.; Hwang, K.Y.; Rhee, S.B.; Kim, D.K.; Kwon, B.I. Optimization of novel flux barrier in interior permanent magnet-type brushless dc motor based on modified Taguchi method. J. Appl. Phys. 2009, 105, 07F106. [Google Scholar] [CrossRef]
- Ashabani, M.; Mohamed, Y.A.R.I.; Milimonfared, J. Optimum design of tubular permanent-magnet motors for thrust characteristics improvement by combined taguchineural network approach. IEEE Trans. Magn. 2010, 46, 4092–4100. [Google Scholar] [CrossRef]
- Ferreira, C.; Vaidya, J. Torque analysis of permanent magnet coupling using 2d and 3d finite elements methods. IEEE Trans. Magn. 1989, 25, 3080–3082. [Google Scholar] [CrossRef]
- Panek, D.; Orosz, T.; Karban, P. Artap: Robust Design Optimization Framework for Engineering Applications. In Proceedings of the 3rd International Conference on Intelligent Computing in Data Sciences, ICDS 2019, Marrakech, Morocco, 28–30 October 2019. [Google Scholar]
- Kaska, J.; Orosz, T.; Karban, P.; Dolezel, I.; Pechanek, R.; Panek, D. Optimization of Reluctance Motor with Printed Rotor. In Proceedings of the COMPUMAG 2019—22nd International Conference on the Computation of Electromagnetic Fields, Paris, France, 15–19 July 2019. [Google Scholar]
- Karban, P.; Pánek, D.; Orosz, T.; Petrášová, I.; Doležel, I. FEM based robust design optimization with Agros and Ārtap. Comput. Math. Appl. 2020, 81, 618–633. [Google Scholar] [CrossRef]
- Tiismus, H.; Kallaste, A.; Vaimann, T.; Rassolkin, A.; Belahcen, A. Axial Synchronous Magnetic Coupling Modeling and Printing with Selective Laser Melting. In Proceedings of the 2019 IEEE 60th International Scientific Conference on Power and Electrical Engineering of Riga Technical University (RTUCON), Riga, Latvia, 7–9 October 2019; pp. 1–4. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dimension/Materials | Value |
|---|---|
| Outer diameter Dout | 30 mm |
| Inner diameter Din | 12.5 mm |
| Thickness of the disks td | 1.2 mm |
| Steel teeth height | 1.6 mm |
| Steel teeth width | 5 mm |
| Steel teeth length | 8 mm |
| Magnets thickness | 3 mm |
| Magnets width | 5 mm |
| Magnets length | 8 mm |
| Air gap | 1.5 mm |
| Objective | Initial Design | GA |
|---|---|---|
| 73.0 × 10−3 Nm | 74.5 × 10−3 Nm | |
| V | 2.31 × 10−6 m3 | 1.91 × 10−6 m3 |
| Parameter | Level 1 | Level 2 | Level 3 | Level 4 | Level 5 |
|---|---|---|---|---|---|
| 1 | 0.8 | 1 | - | - | - |
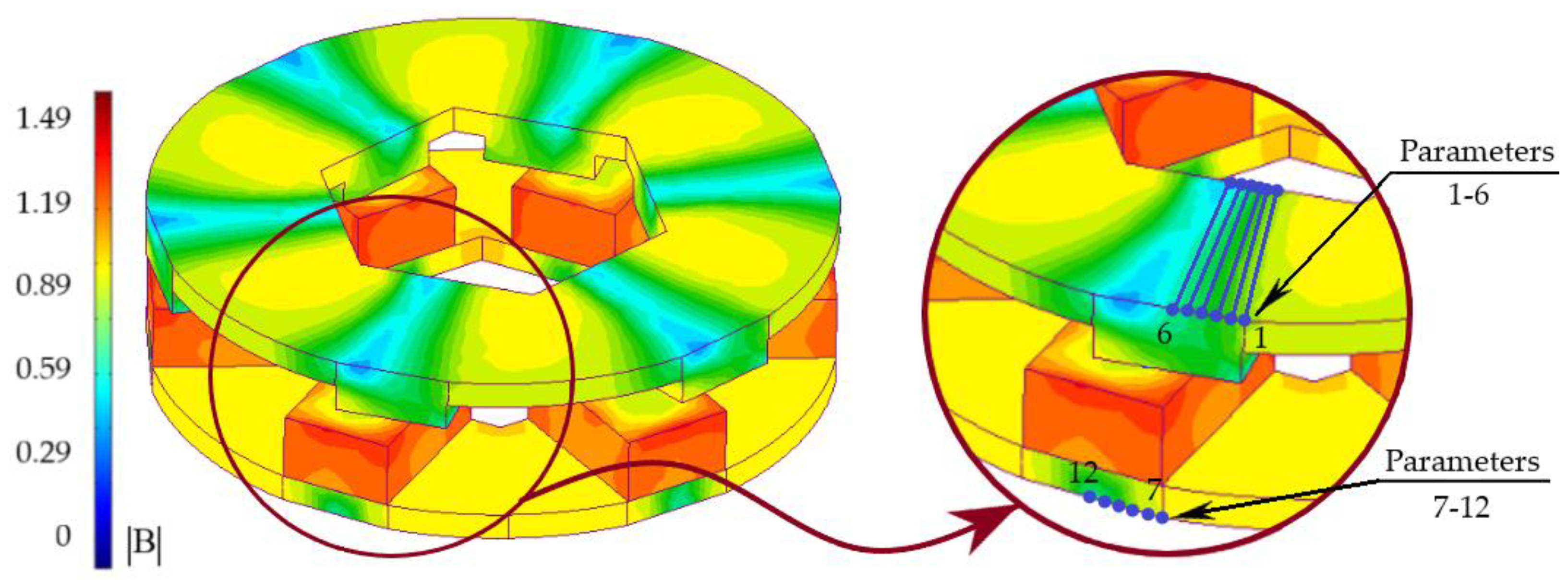
| 2–12 | 0.6 | 0.7 | 0.8 | 0.9 | 1 |
| Variable | Sum of Squares | Factor Effect (%) | Variable | Sum of Squares | Factor Effect (%) |
|---|---|---|---|---|---|
| 1 | 0.0001 | 0.5 | 7 | 0.0023 | 10.0 |
| 2 | 0.0019 | 8.7 | 8 | 0.0025 | 10.9 |
| 3 | 0.0023 | 10.1 | 9 | 0.0025 | 10.7 |
| 4 | 0.0025 | 11.1 | 10 | 0.0027 | 11.7 |
| 5 | 0.0021 | 8.9 | 11 | 0.0024 | 10.5 |
| 6 | 0.0008 | 3.8 | 12 | 0.0007 | 3.1 |
| Objective | Initial Design | Taguchi Design |
|---|---|---|
| 73.0 × 10−3 Nm | 75.0 × 10−3 Nm | |
| V | 2.31 × 10−6 m3 | 1.91 × 10−6 m3 |
| Objective | Initial Design | GA Design | Taguchi Design |
|---|---|---|---|
| 73.0 × 10−3 Nm | 74.5 × 10−3 Nm | 75.0 × 10−3 Nm | |
| V | 2.31 × 10−6 m3 | 1.91 × 10−6 m3 | 1.91 × 10−6 m3 |
| /V | 31.6 kN∙m/m3 | 39.0 kN∙m/m3 | 39.3 kN∙m/m3 |
| Parameter Number | Initial Design | GA Design | Taguchi Design |
|---|---|---|---|
| 1 | 1.2 mm | 0.21 mm | 0.2 mm |
| 2 | 1.2 mm | 0.2 mm | 0.2 mm |
| 3 | 1.2 mm | 0.2 mm | 0.2 mm |
| 4 | 1.2 mm | 0.2 mm | 0.2 mm |
| 5 | 1.2 mm | 0.4 mm | 0.2 mm |
| 6 | 1.2 mm | 0.2 mm | 0.2 mm |
| 7 | 1.2 mm | 0.5 mm | 0.2 mm |
| 8 | 1.2 mm | 0.2 mm | 0.2 mm |
| 9 | 1.2 mm | 0.2 mm | 0.2 mm |
| 10 | 1.2 mm | 0.2 mm | 0.2 mm |
| 11 | 1.2 mm | 0.2 mm | 0.2 mm |
| 12 | 1.2 mm | 0.6 mm | 0.2 mm |
| Specification | Initial Design | Taguchi Design |
|---|---|---|
| 71.0 × 10−3 Nm | 72.0 × 10−3 Nm | |
| V | 2.31 × 10−6 m3 | 1.91 × 10−6 m3 |
| /V | 30.7 kN∙m/m3 | 37.7 kN∙m/m3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Andriushchenko, E.; Kallaste, A.; Belahcen, A.; Vaimann, T.; Rassõlkin, A.; Heidari, H.; Tiismus, H. Optimization of a 3D-Printed Permanent Magnet Coupling Using Genetic Algorithm and Taguchi Method. Electronics 2021, 10, 494. https://doi.org/10.3390/electronics10040494
Andriushchenko E, Kallaste A, Belahcen A, Vaimann T, Rassõlkin A, Heidari H, Tiismus H. Optimization of a 3D-Printed Permanent Magnet Coupling Using Genetic Algorithm and Taguchi Method. Electronics. 2021; 10(4):494. https://doi.org/10.3390/electronics10040494
Chicago/Turabian StyleAndriushchenko, Ekaterina, Ants Kallaste, Anouar Belahcen, Toomas Vaimann, Anton Rassõlkin, Hamidreza Heidari, and Hans Tiismus. 2021. "Optimization of a 3D-Printed Permanent Magnet Coupling Using Genetic Algorithm and Taguchi Method" Electronics 10, no. 4: 494. https://doi.org/10.3390/electronics10040494