
A Cost-Efficient MFCC-Based Fault Detection and Isolation Technology for Electromagnetic Pumps



Abstract
:1. Introduction
2. Motivation, Related Works and Major Contributions
- Proposal of a cost-efficient MFCC-based FDI technology for electromagnetic pumps based on highly discriminant features.
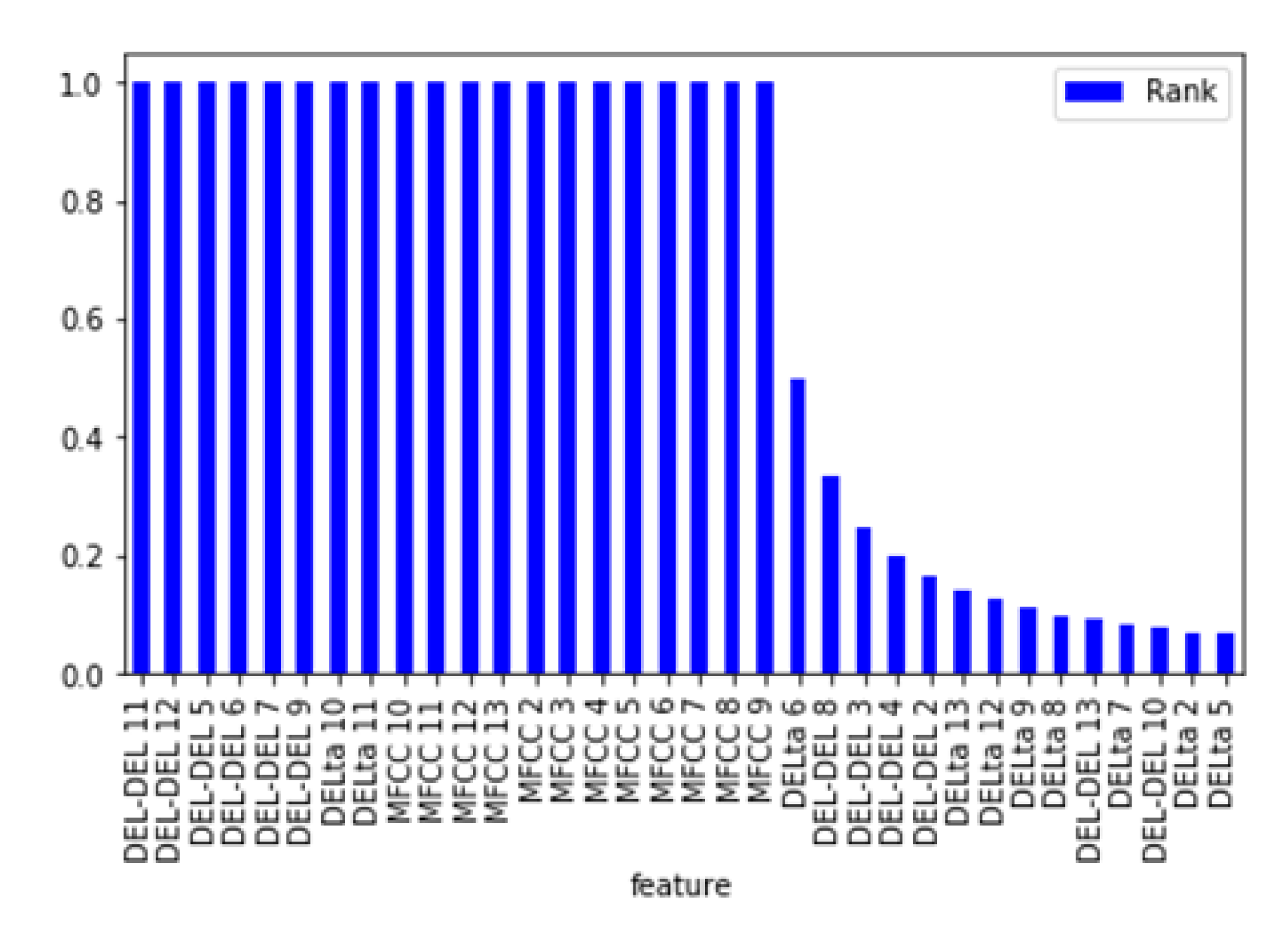
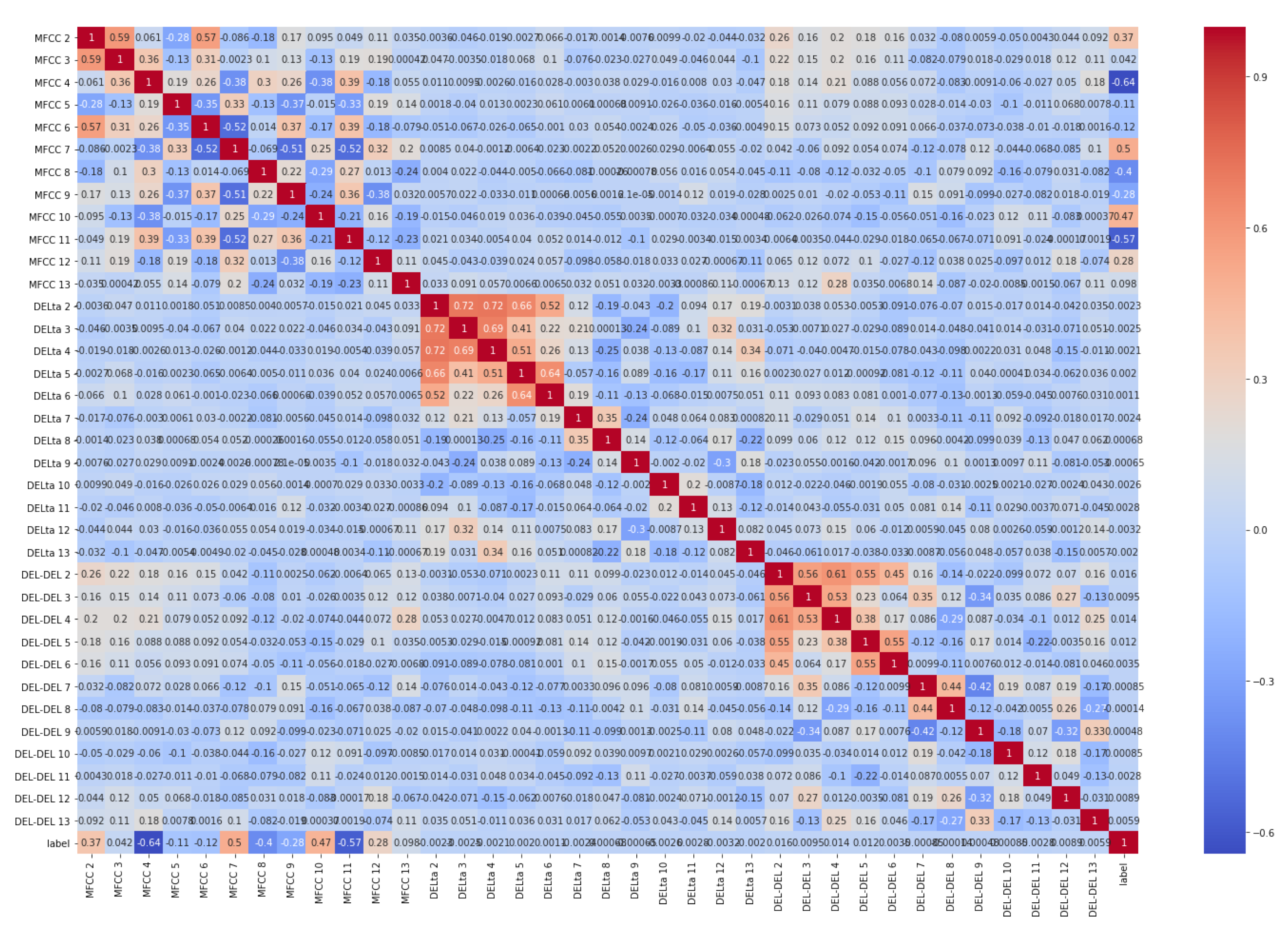
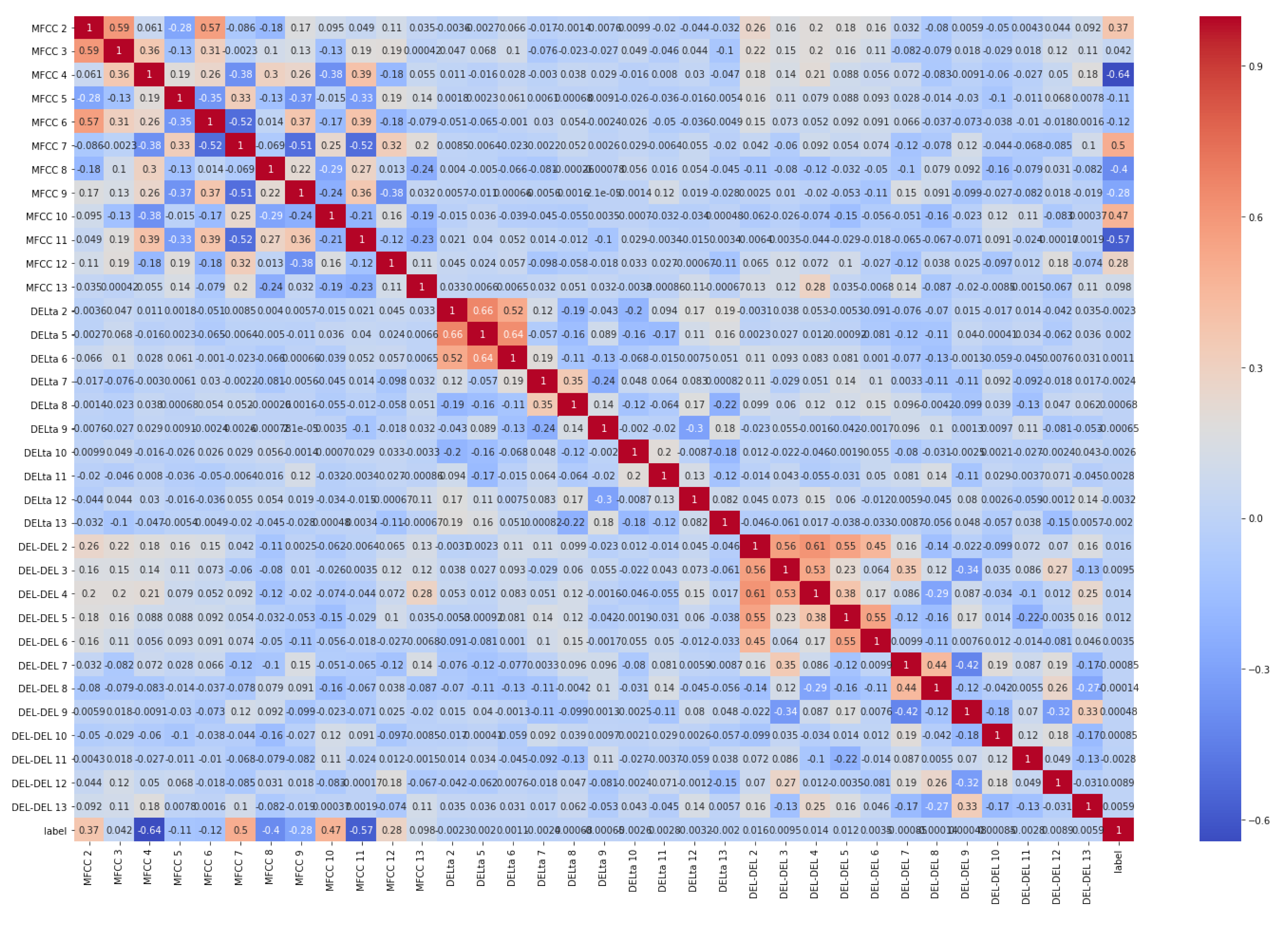
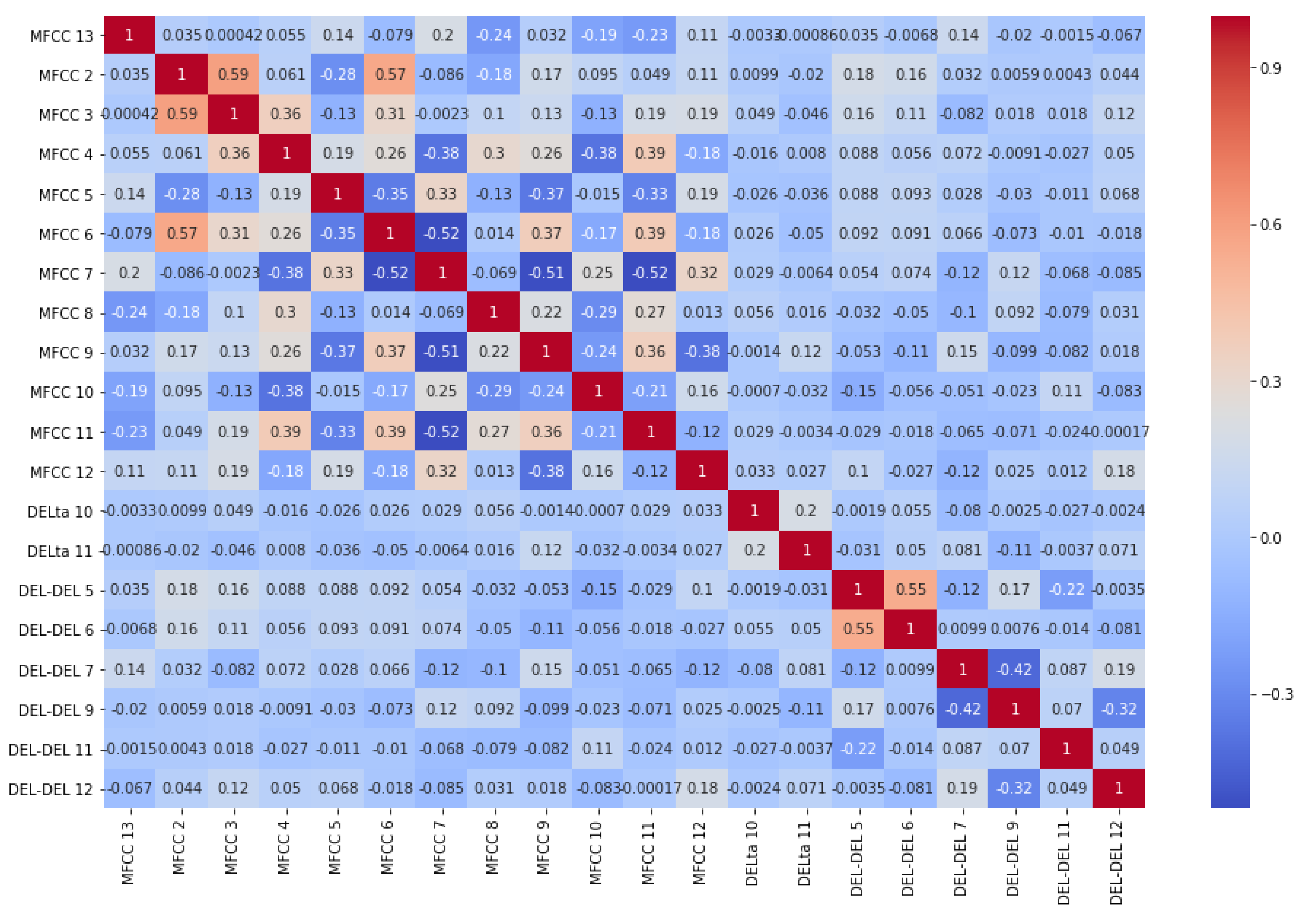
- Implementation of a rank-based feature selection based on Pearson’s correlation and asymptotic significance (recursive feature elimination of irrelevant features) for discriminative feature selection.
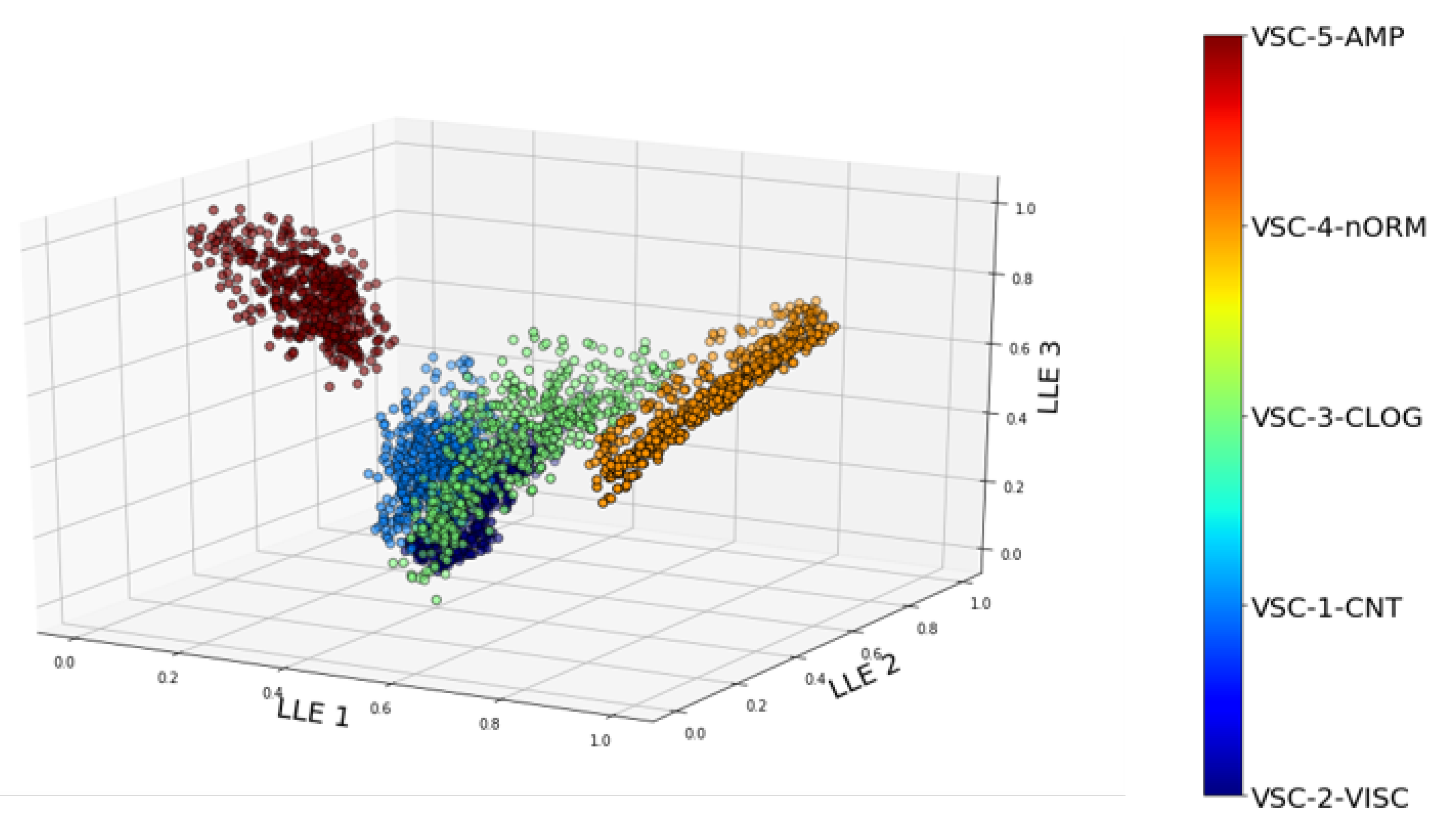
- Improvement of the earlier proposed MFCC-LLE-SVM* fault detection method for improved FDI.
3. Theoretical Background
3.1. Comprehensive Feature Extraction
3.1.1. Continuous Temperature Monitoring
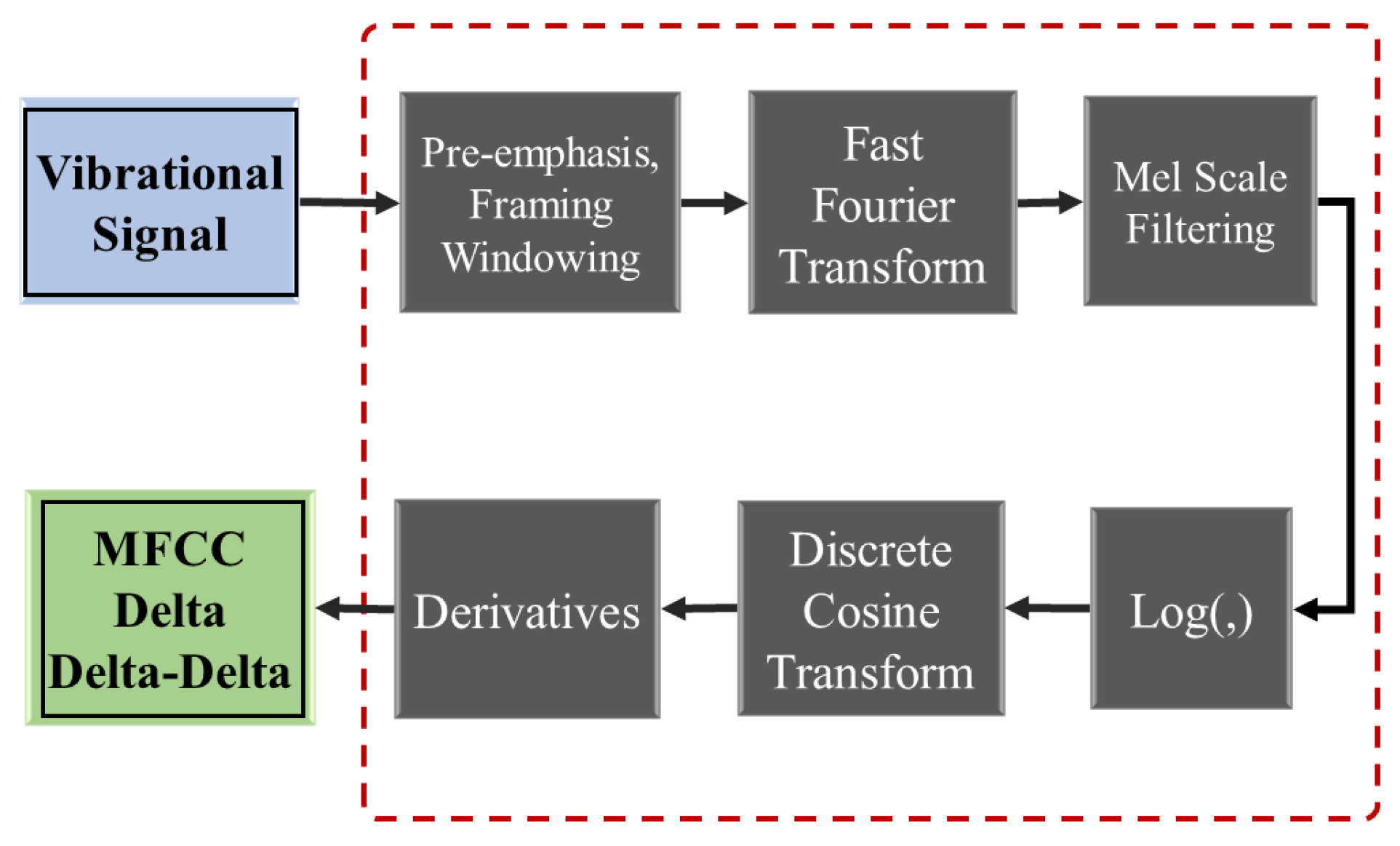
3.1.2. Time–Frequency-Domain Feature Extraction
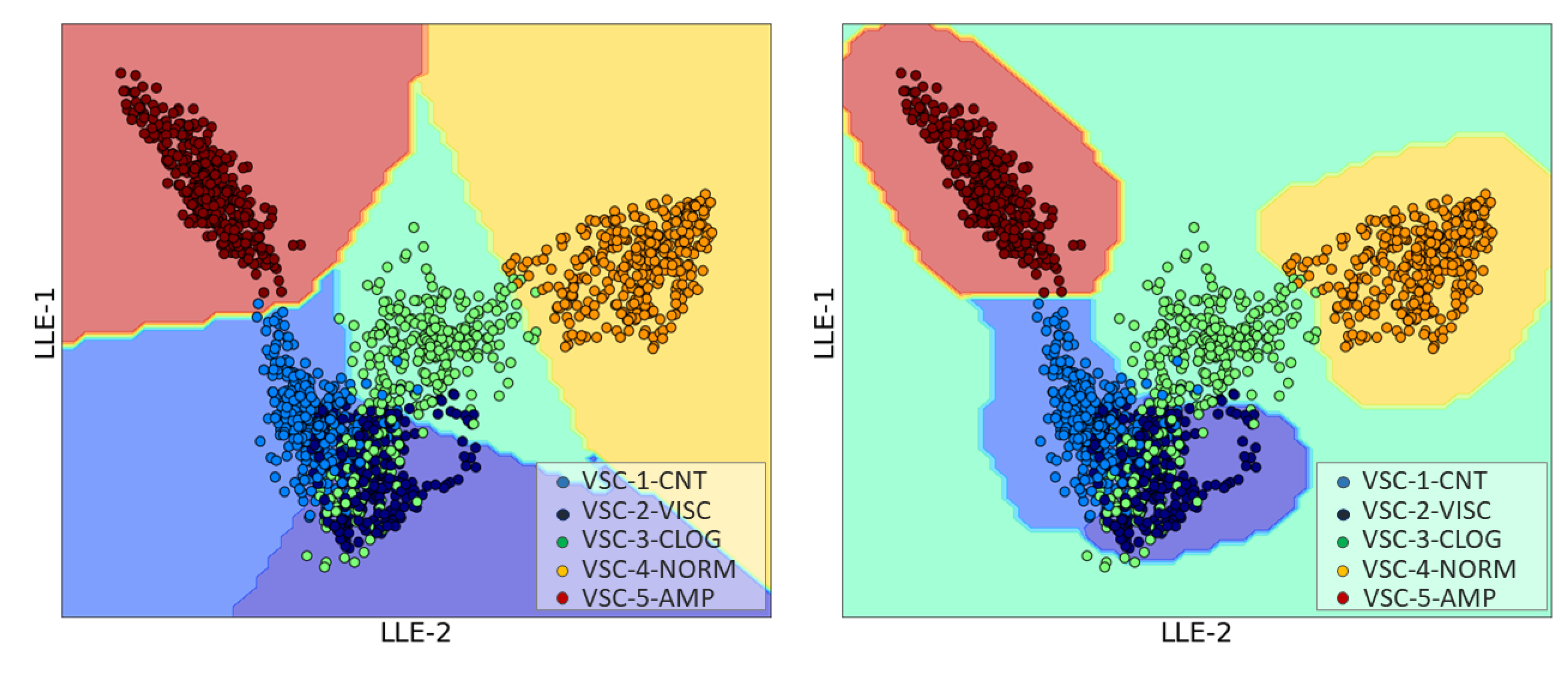
3.2. SVM-RBF-RFE Algorithm for Fault Isolation
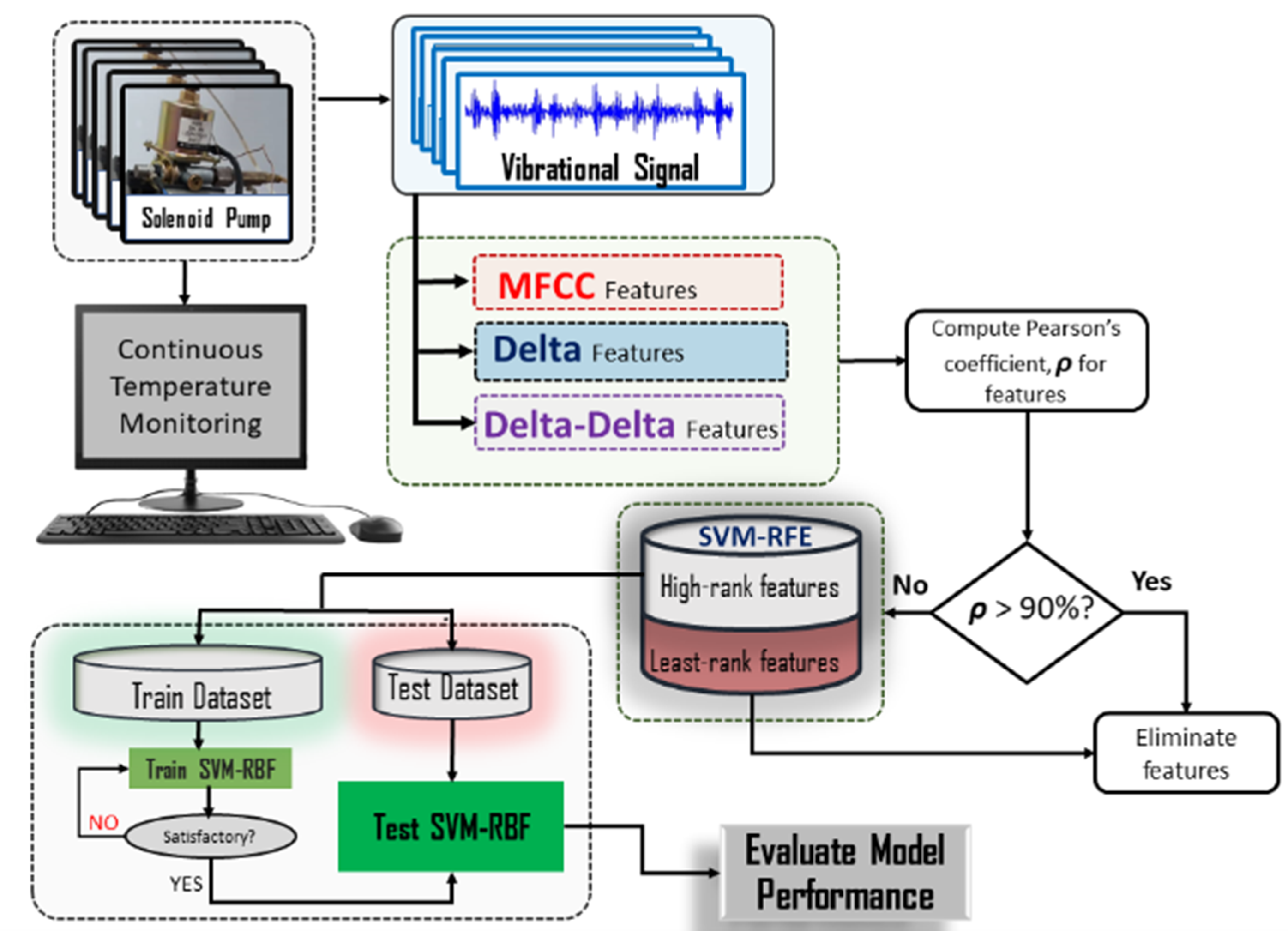
4. Proposed FDI Model
5. Experimental Analysis
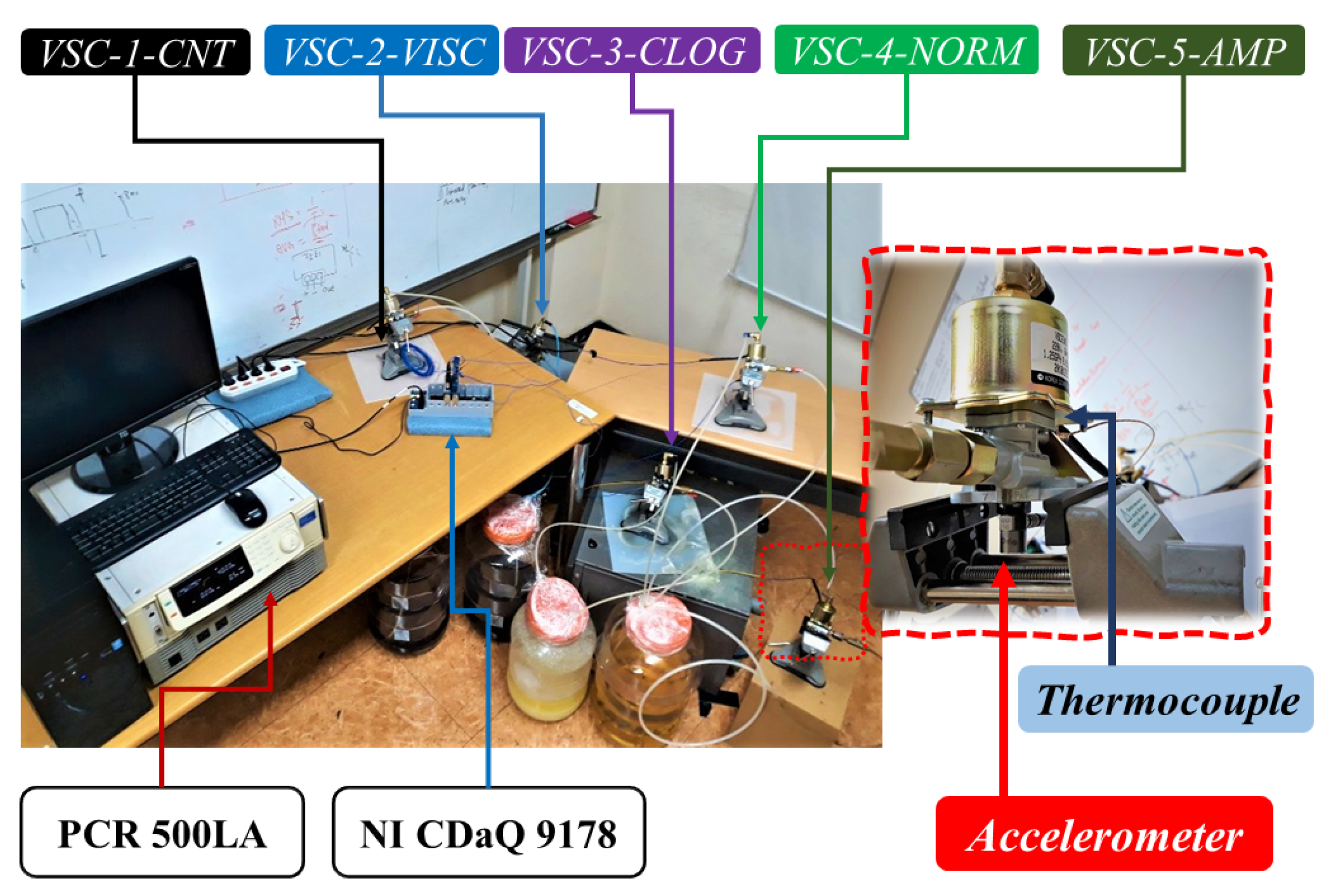
5.1. Experimental Setup
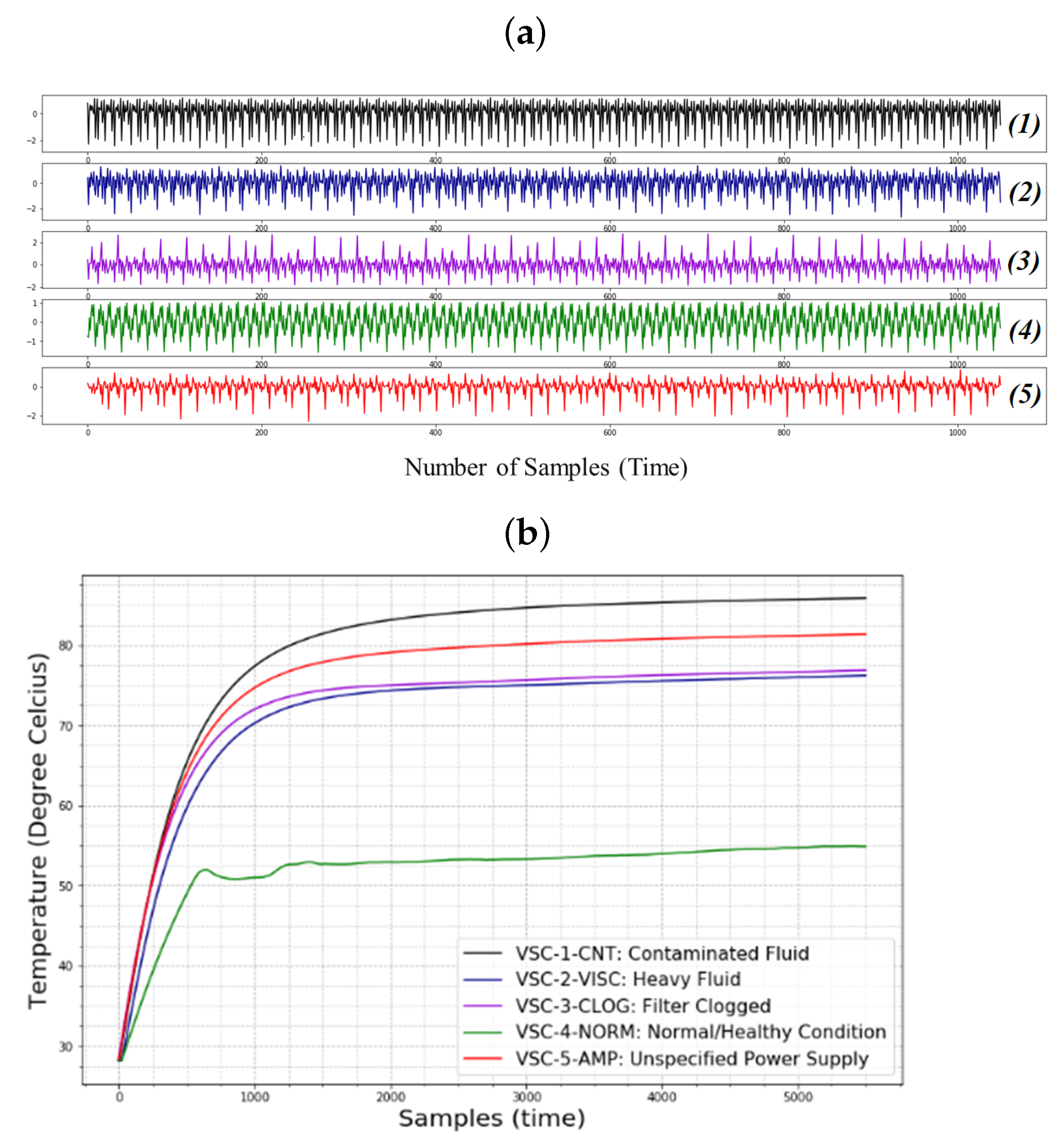
5.2. Experimental Results
5.3. Comprehensive Feature Extraction and Selection
5.4. Fault Isolation by the SVM-RBF-RFE
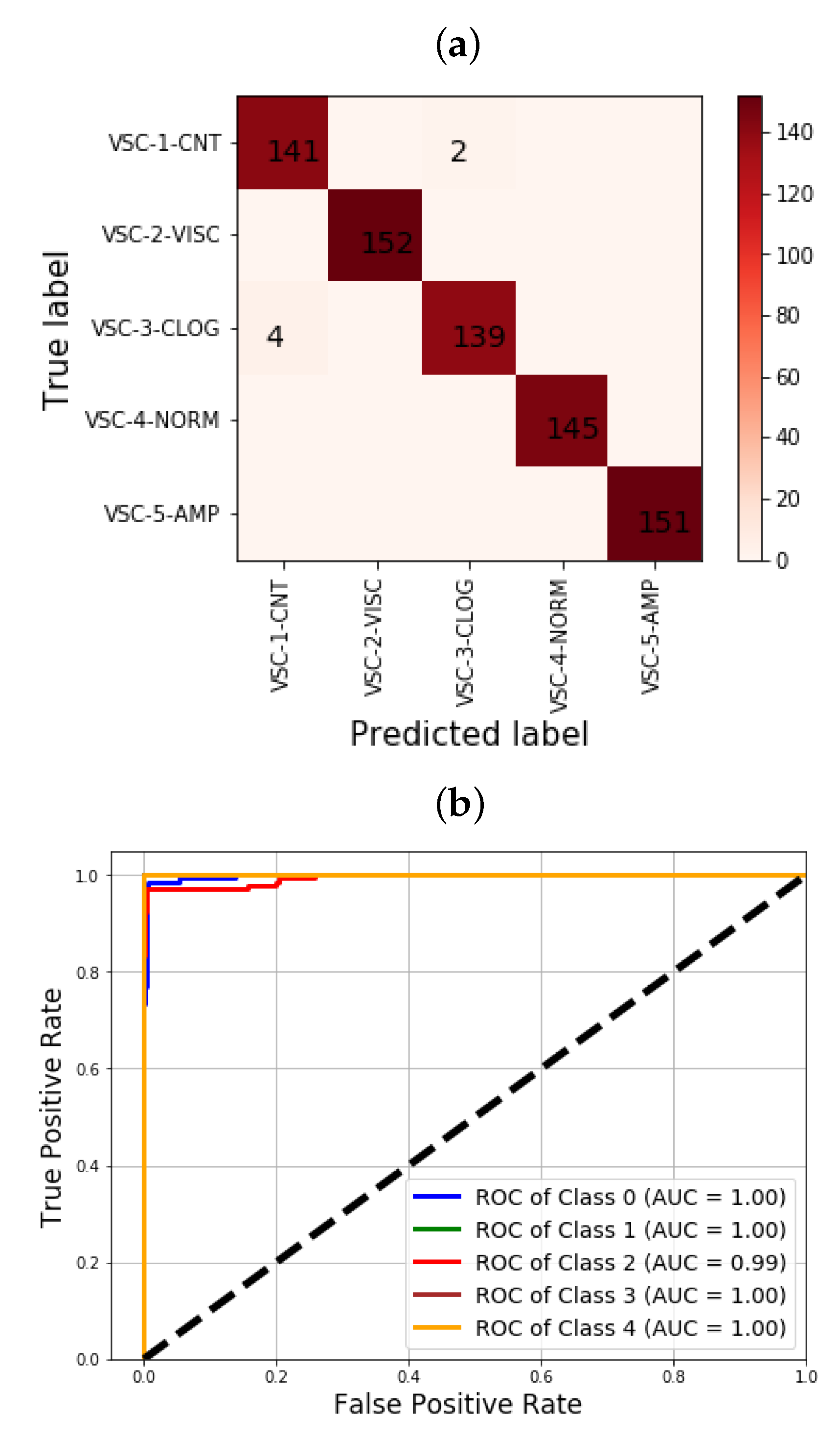
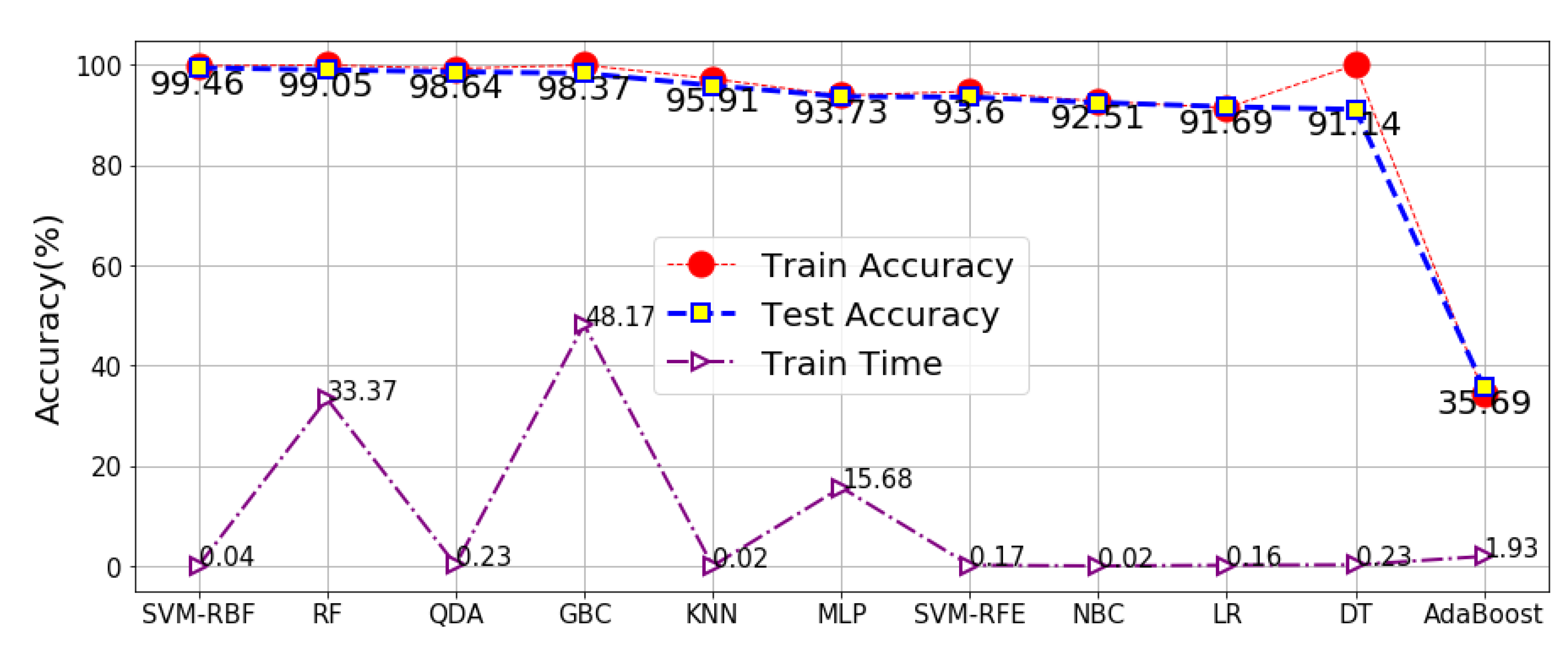
5.5. Performance Evaluation and Comparison
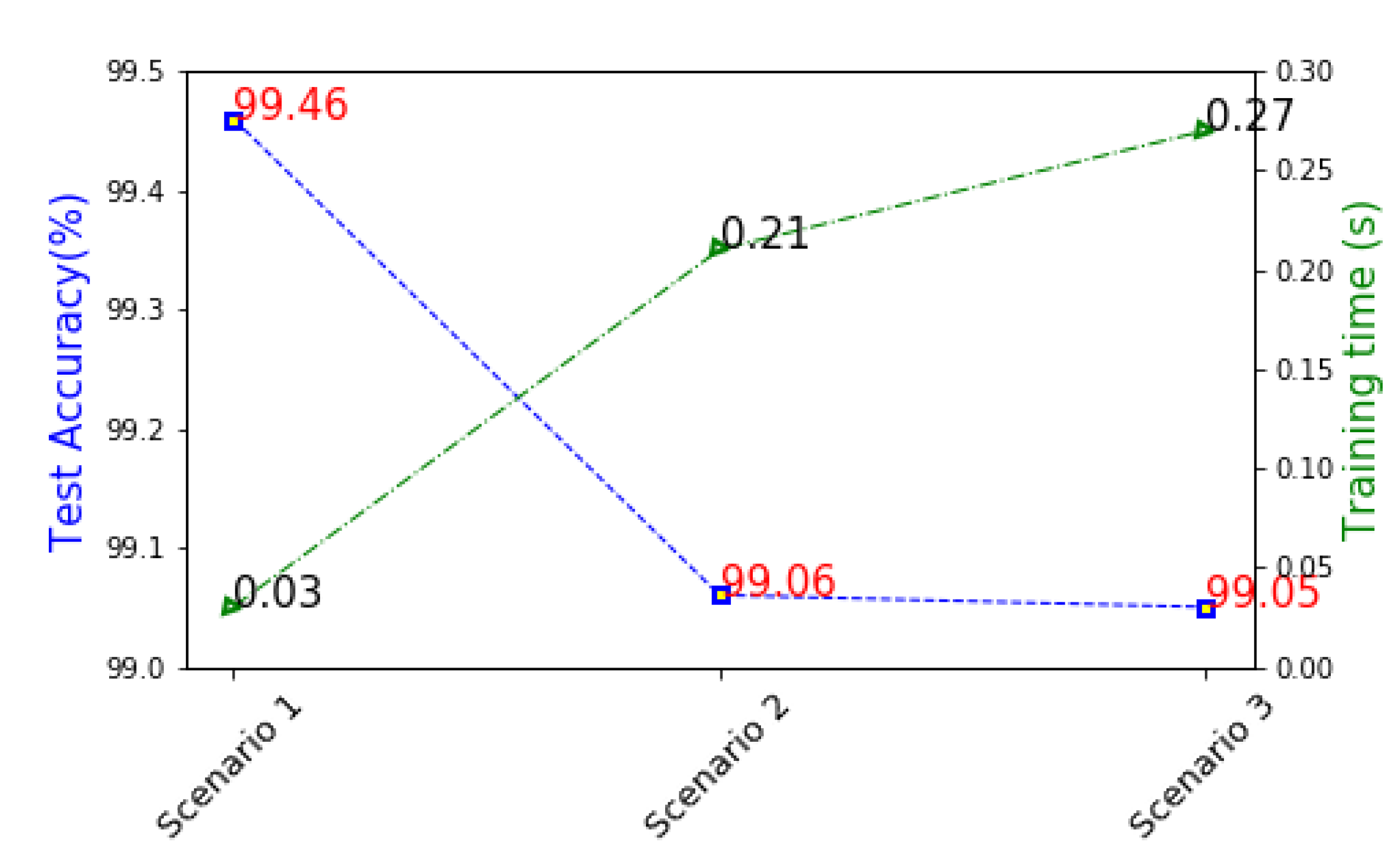
5.6. Cost Analysis of the Proposed FDI Method
- : The use of 20 highest-ranking features.
- : The use of all 34 uncorrelated features.
- : The use of all 36 extracted features.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ABC | Ada-boost Classifier |
| AI | Artificial Intelligence |
| AVR | Automatic Voltage Regulator |
| DAQ | Data Acquisition |
| DCT | Discrete Cosine Transform |
| DL | Deep Learning |
| DT | Decision Tree |
| EMD | Empirical Mode Decomposition |
| EOL | End-of-life |
| FDI | Fault Detection and Isolation |
| FFPN | Feed Forward Pattern Recognition Network |
| FFT | fast Fourier Transform |
| GBC | Gradient Boosting classifier |
| GMM-HMM | Gaussian Mixture Model-Hidden Markov Model |
| NI | National Instrument |
| NN | Nearest Neighbor |
| KNN | K-Nearest Neighbor |
| LLE | Locally Linear Embedding |
| LR | Logistic Regression |
| MFCC | Mel Frequency Cepstral Coefficient |
| ML | Machine Learning |
| MLP | Multi-Layer Perceptron |
| NBC | Naive Bayes Classifier |
| PHM | Prognostics and health management |
| QDA | Quadratic discriminant analysis |
| RBF | Radial Basis Function |
| RF | Random Forest |
| RFE | recursive feature elimination |
| RTD | Resistance Temperature Detector |
| SVM | support vector machine |
| SVM-RBF | Gaussian kernel SVM |
| SVM-RBF-RFE | Gaussian kernel SVM with RFE |
| SVM-RFE | SVM with RFE |
| STFT | short-time Fourier transform |
| VMD | vibrational mode decomposition |
| WT | Wavelet Transform |
| ZCR | Zero-crossing rate |
Appendix A. Feature Selection Results

- The cost of employing the RFE algorithm on the full feature set is reduced,
- Features for prognostics could be easily detected. The highly correlated features which although are irrelevant for the proposed diagnostics scheme, can be highly reliable for prognostics purposes, and
- The overall computational cost reduced.


References
- Xiao, B.; Xiao, B.; Liu, L. State of Health Estimation for Lithium-Ion Batteries Based on the Constant Current–Constant Voltage Charging Curve. Electronics 2020, 9, 1279. [Google Scholar] [CrossRef]
- Yin, S.; Rodriguez-Andina, J.J.; Jiang, Y. Real-Time Monitoring and Control of Industrial Cyberphysical Systems: With Integrated Plant-Wide Monitoring and Control Framework. IEEE Ind. Electron. Mag. 2019, 13, 38–47. [Google Scholar] [CrossRef]
- Akpudo, U.E.; Hur, J.W. Towards bearing failure prognostics: A practical comparison between data-driven methods for industrial applications. J. Mech. Sci. Technol. 2020, 34, 4161–4172. [Google Scholar] [CrossRef]
- Wu, L.; Fu, X.; Guan, Y. Review of the Remaining Useful Life Prognostics of Vehicle Lithium-Ion Batteries Using Data-Driven Methodologies. Appl. Sci. 2016, 6, 166. [Google Scholar] [CrossRef] [Green Version]
- Shanbhag, V.V.; Meyer, T.J.J.; Caspers, L.W.; Schlanbusch, R. Failure Monitoring and Predictive Maintenance of Hydraulic Cylinder—State-of-the-Art Review. IEEE/ASME Trans. Mech. 2021, 1. [Google Scholar] [CrossRef]
- Deulgaonkar, V.R.; Pawar, K.; Kudle, P.; Raverkar, A.; Raut, A. Failure analysis of fuel pumps used for diesel engines in transport utility vehicles. Eng. Fail. Anal. 2019, 105, 1262–1272. [Google Scholar] [CrossRef]
- Suchetha, N.K.; Nikhil, A.; Hrudya, P. Comparing the Wrapper Feature Selection Evaluators on Twitter Sentiment Classification. In Proceedings of the 2019 International Conference on Computational Intelligence in Data Science (ICCIDS), Chennai, India, 21–23 February 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Etaiwi, W.; Awajan, A. The Effects of Features Selection Methods on Spam Review Detection Performance. In Proceedings of the 2017 International Conference on New Trends in Computing Sciences (ICTCS), Amman, Jordan, 11–13 October 2017; pp. 116–120. [Google Scholar] [CrossRef]
- Visalakshi, S.; Radha, V. A literature review of feature selection techniques and applications: Review of feature selection in data mining. In Proceedings of the 2014 IEEE International Conference on Computational Intelligence and Computing Research, Coimbatore, India, 18–20 December 2014; pp. 1–6. [Google Scholar]
- Akpudo, U.E.; Hur, J.W. Intelligent Solenoid Pump Fault Detection based on MFCC Features, LLE and SVM. In Proceedings of the International Conference on AI in information and communication (ICAIIC 2020), Fukuoka, Japan, 19–21 February 2020; pp. 404–408. [Google Scholar]
- Akpudo, U.E.; Hur, J.W. A Multi-Domain Diagnostics Approach for Solenoid Pumps Based on Discriminative Features. IEEE Access 2020, 8, 175020–175034. [Google Scholar] [CrossRef]
- Sanchez, R.-V.; Lucero, P.; Macancela, J.-C.; Cerrada, M.; E Vasquez, R.; Pacheco, F. Multi-fault Diagnosis of Rotating Machinery by Using Feature Ranking Methods and SVM-based Classifiers. In Proceedings of the 2017 International Conference on Sensing, Diagnostics, Prognostics, and Control (SDPC), Shanghai, China, 16–18 August 2017; pp. 105–110. [Google Scholar] [CrossRef]
- Zhang, J.; Jiang, Q.; Chang, F. Fault Diagnosis Method Based on MFCC Fusion and SVM. In Proceedings of the 2018 IEEE International Conference on Information and Automation (ICIA), Wuyishan, China, 11–13 August 2018; pp. 1617–1622. [Google Scholar]
- Zhao, H.; Zhang, J.; Jiang, Z.; Wei, D.; Zhang, X.; Mao, Z. A New Fault Diagnosis Method for a Diesel Engine Based on an Optimized Vibration Mel Frequency under Multiple Operation Conditions. Sensors 2019, 19, 2590. [Google Scholar] [CrossRef] [Green Version]
- Jiang, Q.; Chang, F.; Sheng, B. Bearing Fault Classification Based on Convolutional Neural Network in Noise Environment. IEEE Access 2019, 7, 69795–69807. [Google Scholar] [CrossRef]
- Peng, P.; He, Z.; Wang, L. Automatic Classification of Microseismic Signals Based on MFCC and GMM-HMM in Underground Mines. Shock Vib. 2019, 2019, 5803184. [Google Scholar] [CrossRef]
- Nikravesh, S.M.Y.; Rezaie, H.; Kilpatrik, M.; Taheri, H. Intelligent Fault Diagnosis of Bearings Based on Energy Levels in Frequency Bands Using Wavelet and Support Vector Machines (SVM). J. Manuf. Mater. Process 2019, 3, 11. [Google Scholar] [CrossRef] [Green Version]
- Bandyopadhyay, I.; Purkait, P.; Koley, C. Performance of a Classifier Based on Time-Domain Features for Incipient Fault Detection in Inverter Drives. IEEE Trans. Ind. Inf. 2018, 15, 3–14. [Google Scholar] [CrossRef]
- Cortes, C.; Vapnik, V. Support-Vector Networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Han, T.; Jiang, D.; Zhao, Q.; Wang, L.; Yin, K. Comparison of random forest, artificial neural networks and support vector machine for intelligent diagnosis of rotating machinery. Trans. Inst. Meas. Control 2018, 40, 2681–2693. [Google Scholar] [CrossRef]
- Texas Instruments. The Engineer’s Guide to Temperature Sensing. Available online: https://www.ti.com/lit/pdf/slyy161 (accessed on 21 November 2020).
- Herff, C.; Krusienski, D.J. Extracting Features from Time Series. In Fundamentals of Clinical Data Science; Kubben, P., Dumontier, M., Dekker, A., Eds.; Springer: Cham, Switzerland, 2019; pp. 85–100. [Google Scholar]
- Stockwell, R. A basis for efficient representation of the S-transform. Digit. Signal Process. 2007, 17, 371–393. [Google Scholar] [CrossRef]
- Tychkov, A.; Alimuradov, A.; Churakov, P. The emperical mode decomposition for ECG signal preprocessing. In Proceedings of the 2019 3rd School on Dynamics of Complex Networks and their Application in Intellectual Robotics (DCNAIR), Innopolis, Russia, 9–11 September 2019; pp. 172–174. [Google Scholar] [CrossRef]
- Stoev, S.; Taqqu, M.; Park, C.; Marron, J.S. Strengths and Limitations of the Wavelet Spectrum Method in the Analysis of Internet Traffic; Technical Report; Statistical and Applied Mathematical Sciences Institute: Durham, NC, USA, 2004. [Google Scholar]
- Li, L.; Yu, Y.; Bai, S.; Cheng, J.; Chen, X. Towards Effective Network Intrusion Detection: A Hybrid Model Integrating Gini Index and GBDT with PSO. J. Sens. 2018, 2018, 1578314. [Google Scholar] [CrossRef] [Green Version]
- Galton, F. Co-relations and their measurement, chiefly from anthropometric data. Proc. R. Soc. 1888, 45, 135–145. [Google Scholar]
- Hsu, C.; Chang, C.; Lin, C. A Practical Guide to Support Vector Classication; Technical Report; University of National Taiwan: Taipei, Taiwan, 15 April 2010; pp. 1–12. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pump Label | Input Power | Working Fluid Composition | Failure Mode | Class Label |
|---|---|---|---|---|
| VSC-1-CNT | 220 V, 60 Hz | 4 L Diesel, 5 g Paper Ash | Contamination Fluid | 0 |
| VSC-2-VISC | 220 V, 60 Hz | 3 L Diesel, 3 L SAE40 Engine Oil | Highly Viscous Fluid | 1 |
| VSC-3-CLOG | 220 V, 60 Hz | 4 L Diesel, 1 g Paper Ash, 0.2 L Paraffin Solution, 100 g Pectin Powder | Clogged Suction Filter | 2 |
| VSC-4-NORM | 220 V, 60 Hz | 10 L Clean Diesel | Normal | 3 |
| VSC-5-AMP | 300 V, 40 Hz | 10 L Clean Diesel | Unspecified power supply | 4 |
| Pump Label | Precision | Recall | F1-Score |
|---|---|---|---|
| VSC-1-CNT | 0.95 | 0.98 | 0.97 |
| VSC-2-VISC | 1.00 | 1.00 | 1.00 |
| VSC-3-CLOG | 0.98 | 0.95 | 0.96 |
| VSC-4-NORM | 1.00 | 1.00 | 1.00 |
| VSC-5-AMP | 1.00 | 1.00 | 1.00 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Akpudo, U.E.; Hur, J.-W. A Cost-Efficient MFCC-Based Fault Detection and Isolation Technology for Electromagnetic Pumps. Electronics 2021, 10, 439. https://doi.org/10.3390/electronics10040439
Akpudo UE, Hur J-W. A Cost-Efficient MFCC-Based Fault Detection and Isolation Technology for Electromagnetic Pumps. Electronics. 2021; 10(4):439. https://doi.org/10.3390/electronics10040439
Chicago/Turabian StyleAkpudo, Ugochukwu Ejike, and Jang-Wook Hur. 2021. "A Cost-Efficient MFCC-Based Fault Detection and Isolation Technology for Electromagnetic Pumps" Electronics 10, no. 4: 439. https://doi.org/10.3390/electronics10040439