
A Real-Time Matrix Iterative Optimization Algorithm of Booking Elevator Group and Numerical Simulation Formed by Multi-Sensor Combination


Abstract
:Highlights
- This paper proposes a real-time matrix iteration optimization algorithm, using a matrix to describe the elevator’s operation condition. Our algorithm improves the utilization rate, reducing waiting time, having less total running time, and having low round-trip frequency, when compared with the other four methods.
- A reservation elevator software has been designed in this paper. So, there is no need to touch the button in this way, which can avoid the chance of spreading bacteria. The manned equilibrium efficiency and running time equilibrium efficiency of elevator group are given.
- Application face recognition can improve algorithm stability. Increasing indoor navigation UWB technology can help users to quickly find nearby elevators. In addition, waiting time and elevator remaining space data filtering criteria formulas are given.
- For super high-rise buildings, this paper adopts a hierarchical management model, which can improve coordination and operation speed. Finally, the computational complexity of a single elevator and an elevator group are compared.
1. Introduction
1.1. Research Motivation and Significance
1.2. Related Work
1.3. Contributions
1.4. Structure and Framework of This Paper
2. Mathematical Model and Application Design of Booking Elevators
2.1. Variable Interpretation
2.2. Single Elevator Booking Model
2.2.1. Booking Data Collection
2.2.2. Application of Indoor UWB Navigation
2.2.3. Matrix Description Method of Elevator Operation Status
2.2.4. Automatic Load Limit Function
- (1)
- When k = 1:The initial iteration is carried out; what needs to be emphasized here is on the first floor. Only passengers on the first floor have the demand to go upstairs, but no passengers leave the elevator at the beginning. represents the manned space left after the first floor is loaded into the passengers.In Formula (19), indicates the total number of users who starting point is the first floor, and the destination floor is .
- (2)
- When k = :Similarly, it indicates that the remaining space of the elevator is:
- (3)
- When :This indicates that the elevator has reached the highest floor. At this time, only passengers leave the elevator and finish the upward transportation. Finally, the formula is established.
- (4)
- Capacity matrix load limiting formula.The elevator moves upward, and the initial iteration value is , . Ultimately, each element of the capacity matrix corresponds to each bit (within the time limit) that is authorized to take the passenger .Whether the elevator moves up or down through each floor, the elevator available space between empty and full load, the internal elements of the capacity matrix satisfy the relationship:
2.2.5. Real-Time Matrix Iterative Optimization Algorithm
A Reference Standard for User’s Waiting Time
Dynamic Matrix Iterative Optimization Algorithm
- (1)
- When the elevator moves upward.The total number of people allowed to enter through each layer must be less than the maximum load of the elevator; the mathematical expression is:At the first iteration, the elevator is ready to go up and handle the reservation tasks on the first floor, and the initial value of the iterative algorithm satisfies the following relationship: The remaining matrix =, the waiting matrix , and the entering matrix , are given here. are the elevator space judgment functions. As long as the users are not overloaded, the first floor users will be allowed to continue enter.Stop is a subscript index of the entering matrix ; it means that the elevator has enough space for some users who from current floor to use it. Output the index number , stop, stop that meets the judgment of elevator capacity. After the first iteration, the remaining tasks are assigned to the second iteration , and the following relationship exists between the iteration matrices:When the number of iterations is , the iteration from the second floor to the n-th floor.Expanding Formula (29), a more detailed iterative formula can be obtained.It should be emphasized that the elevator space judgment function from the second floor to the n-th floor is different from the judgment condition of the first floor, where is the loadable space when the elevator reaches the floor; the detailed solution process can be referred to Section 2.2.4.Finally, to the nth floor, we need to determine whether is a zero matrix or not. If so, it means that all users with upward demand are loaded, and the task is completed. If is a non-zero upper triangular matrix, it means that there is still a residual tasks. According to the iterative algorithm, it enters the next cycle until is a zero matrix. The above is the upward iterative optimization algorithm of the reservation matrix. For the downward iterative algorithm, it is similar to the upward process.
- (2)
- When the elevator moves downward.The total number of people allowed to enter each floor satisfies the following inequality relationship:When the elevator moves downward, start with layer n, initial assignment is , the algorithm defaults to the first iteration, and the iterative relationship is as follows:Calculating Equation (34) requires the use of the elevator space judgment function , and the initial judgment conforms to Equation (27). Then, we can obtain a more detailed iterative formula:The remaining tasks are assigned to the second iteration .When the number of iterations is , this belongs to the iteration from the 1st floor to the 1st floor.Further expanding of Formula (35), we get a more detailed iterative formula:Similarly, the elevator space judgment function here satisfies Equation (31). In addition, the iterative algorithm also has the following law: The elevator moves in the same direction from the 1st floor to the n floor at a time (or descends from the n floor to the 1st floor), which are known as a motion semicycle of the elevator. This must satisfy the relationship is that the total number of people entering the elevator is equal to the total number of people leaving the elevator. The expression is as follows:
Matrix Iterative Algorithm Optimization Process and Data Structure
- (1)
- Data pre-processing optimization: The advantage of the reservation elevator can understand the number of people waiting to take the elevator on each floor and the submission time, which is conducive to the accurate assignment of tasks.
- (2)
- Time optimization: The reservation order is time-sensitive. If the timeout is not reached or the reservation is too late, the system will delete this request information. Within the acceptable waiting time of other customers, users who are close to the elevator will be carried first.
- (3)
- Automatic load limit: When the number of people specified by the elevator is reached, the elevator will stop adding new users, which can effectively prevent overloading.
- (4)
- Hierarchical management optimization: If the floor is exceptionally high, implement the segmented mode of delivery. In other words, the building elevator will be divided into high-level, middle-level, and low-level.
Task Scheduling Equilibrium Efficiency of Elevator Group
2.3. Synergy and Control Principle of Elevator Group
2.3.1. Data Pre-processing of Group Control Reservation Elevator
- (1)
- According to the movement direction of the elevator which can divide the reservation data into two parts, they are uplink task table and downlink task table.
- (2)
- If the customer makes an appointment too late, or does not arrive at the destination in accordance with the time specified by the system, this data will be automatically deleted. If you continue to ride, you need to make a new appointment.
- (3)
- If the building is relatively high, and the hierarchical management is adopted, the reservation data needs to be divided into three tasks, such as high, medium, and low. The data pre-processing work is to improve the speed and accuracy of the elevator system calculation.
2.3.2. Multi-Sensor of Elevator Groups Connection and Function
2.3.3. Two-Terminal Batch Transfer Method
2.4. Strategy for Preventing Malicious Data Intrusion
- (1)
- Elevators with abnormal data in group control elevators (the user did not arrive at the elevator on time) need feedback to the control center in time to re-assign tasks.
- (2)
- Face recognition equipment is installed in each elevator. Users are required to upload a recent photo or selfie for entry, which can be quickly matched when someone enters the elevator. If the recognition fails, the system can also use Bluetooth to authenticate the user.
- (3)
- If the elevator encounters users who do not abide by the rules, a lot of people are suddenly added to the elevator, which affects the assignment of collaborative tasks. At this time, the elevator can be decoupled and isolated as a traditional algorithm elevator. After the passengers are loaded, the collaborative relationship can be restored.
- (4)
- When the user mobile phone has no power, they can touch the computer screen outside the door to achieve one-on-one submission and take photos.
3. Experimental Simulation
3.1. Numerical Example 1
3.2. Numerical Example 2
3.2.1. Double Control Elevator Matrix Iteration Algorithm
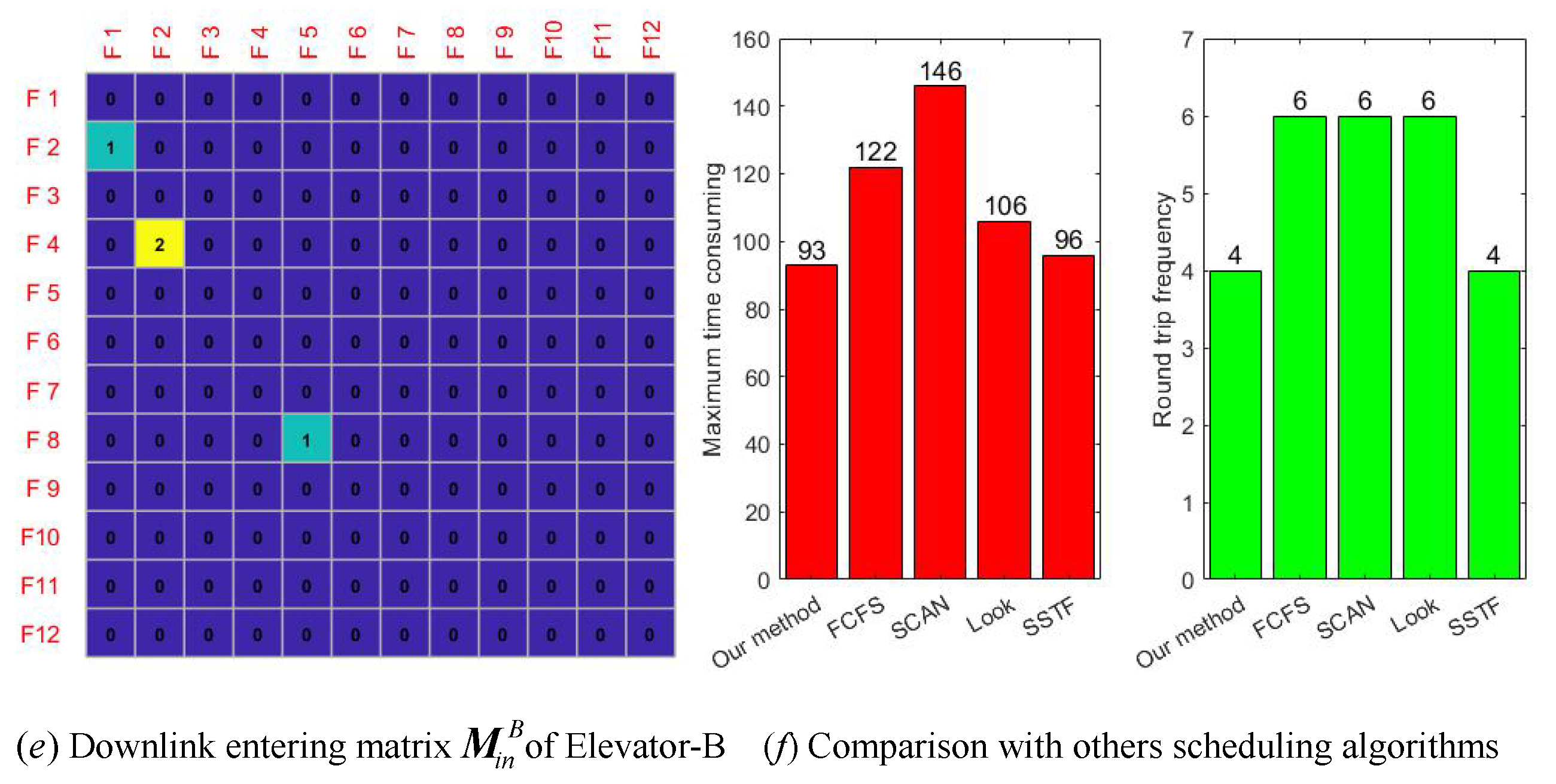
3.2.2. Comparison of Example 2 with Other Four Scheduling Algorithms
- (1)
- FCFS algorithmThe FCFS does not optimize the search for floors and has no real-time characteristics. It is scheduled according to the order of passenger requests. The advantages of this algorithm are fairness and simplicity, and defects include that the performance of this algorithm will be severely degraded in the case of a large load. In the first cycle, the first two tasks (4,8,2,8) and (10,7,1,9) need to be finished, and then the remaining tasks are completed based on the load limit. If the dual-control elevator adopts the FCFS algorithm, the total time required is , and the movement frequency is .
- (2)
- SCAN algorithmScanning algorithm (SCAN) is a scheduling algorithm that serves in the order of floors. It allows elevators to continuously run back and forth between the bottom and top floors. This algorithm has high stability, but the disadvantage is that the elevator belongs to the default mode in the same direction every time it runs, which can easily cause the user to choose the wrong direction. Moreover, the average response time of the scanning algorithm is relatively longer. If the dual-control elevator adopts the SCAN algorithm, the total time required is , and the movement frequency is . This algorithm does not make any optimization in terms of floor response, so the movement time is relatively long.
- (3)
- LOOK algorithmThis algorithm is similar to the SCAN algorithm and has the characteristics of a round-trip movement. The difference is that the SCAN algorithm has no request at both ends when there is no need to go to the top and bottom of the elevator with no load, especially during off-peak periods, the SCAN algorithm is more energy-efficient, and the running time and elevator utilization are relatively ideal. The maximum time consumption of using the LOOK algorithm is , and the total frequency of elevator movement is . The LOOK algorithm takes less time, but the frequency of exercise is still relatively high. It is not good enough to balance the floor optimization and waiting time.
- (4)
- SSTF algorithmSSTF algorithm, which focuses on the optimization of the elevator to find the floor. The principle of the shortest seeking floor time priority algorithm to select the next service object is the shortest time to find the floor. The advantage is that the request from the nearest floor in the requested queue is the next service object. The drawback is that the algorithm has a short average response time during peak usage periods, but the response variance is large, and the request task of the remote floor has been in a waiting state. The maximum time consumption of using this algorithm is , and the total frequency of elevator movement is . Compared with the matrix iteration method in this paper, the maximum time consumption and the number of movement frequency are basically the same.
3.2.3. Visualization of Numerical Results
3.3. Numerical Example 3
3.3.1. Statement of Issues
3.3.2. Numerical Scheduling Results of Elevator Group with 6 Elevators
- (1)
- Low-rise area.For super high buildings, we adopt a hierarchical management modle to complete the tasks of the elevator group. The low-floor area refers to floors 1–20, and the booked tasks of users are mainly completed by Elevator-AB. Firstly, the task table needs to be divided into uplink and downlink by the users’ direction demand index value of k. The low-floor reservation information table (tasks to be completed) includes the waiting matrix and from uplink Task1 and downlink Task2. i represents the initial floor, j is the destination floor, k represents the move direction index in matrix , and the subscript of represents the first motion cycle. and are all sparse matrix. The up and down tasks of Elevator-AB are shown in Table 3.The number of starting elevators shall be determined by the flow of people. In this example, we collected reservation data within 2 min at the peak period. The elevator limited load requirements . The time required for the elevator to stay on the reserved floor is , it takes time for the elevator to pass through an unreserved floor. The reference standard for user’s waiting time are: , . indicates the time from the user submission place to walk to the elevator waiting area. In this example, is 0 s by default, indicating that all users have reached the waiting area. The elevator group system first assigns tasks to Elevator-A; if there are remaining tasks, Elevator-B will complete them. So, the elevator group system allows parts of the users to take the elevator first, and the remaining customers will be take it next time. The move matrix and are formed from and . Elevator-A moves upward with a total of 27 people, and Elevator-B moves downward with a total of 40 people. The internal elements of the moving matrix of Elevator-AB in the first movement cycle up and down are shown in Table 4.After the system tasks are divided, Elevator-AB actually starts at the same time. It should be emphasized that the initial position of Elevator-A stays on the 1st floor, and Elevator-B stays on the 20th floor. Afterwards, Elevator-A moves upward and Elevator-B moves downward. This belongs to initial location optimization, this setting can quickly respond to users with different destination needs. At the same time, the remaining tasks of Elevator-A and Elevator-B are completed by the other party after they are exchanged. The purpose is to balance the workload of Elevator-AB basically the same and improve the work cooperation efficiency. Following the matrix iterative formula, the uplink remaining tasks of Elevator-A will be completed by Elevator-B. Meanwhile, the downlink remaining tasks of Elevator-B will be completed by Elevator-A; this task assignment satisfies the expression . The first movement cycle tasks of Elevator-AB are shown in Table 5 and Table 6. According to the tasks assigned by the elevator group system, there will be no task transportation errors with each other. In a complete movement cycle (one cycle up and down), the equilibrium efficiencies of Elevator-AB for carrying users is . The specific remaining tasks of Elevator-AB are as follows in Table 5.
- (2)
- Middle floor areaIn the middle floor area, the elevator in the upward movement of the floor reservation interval is from 21st to 40th floor, and downward movement of the floor reservation interval is 40th to 1st floor. Therefore, the user is on the first floor, and the lowest reservation floor is 21 floors; 2–20 floors are prohibited uplink reservations. The advantage of this regulation is to prevent the elevator from running for too long without load, resulting in waste of power supply. In addition, without zoning, it is difficult to ensure that users on high floors can get a timely response. The scheduling tasks are completed by Elevator-CD. The booking data of the middle floor part are shown in Table 6.The initial position of Elevator-C stays at 1st floor, and the initial position of Elevator-D is the 40th floor. Therefore, in the first iteration, Elevator-C moves upward and Elevator-D moves downward. Firstly, the up and down reservation information are separated according to the value k of director index matrix, and the classified data are stored in the downlink Task 3 and the uplink Task 4, respectively, in Table 6, Task3 and Task4 can be recorded as waiting matrix and . Task3 and Task4 have the same number of reserved orders, but the total number of reserved orders is significantly different. There are two optimization strategies in the task assignment; one is to optimize the initial parking position, and the other is the cross exchange of up and down tasks, in order to improve the balance of carrying people.For the task assignment problem in the middle floor, in first half cycle of motion, Elevator-C is responsible for the uplink task, and Elevator-D is responsible for the downlink task. The task assignment principle of Elevator-CD is similar to that of Elevator-AB, only controlling the destination floor range difference from 21st to 40th floor when the elevator moves upward. Elevator-C moves upwards and can carry the total number of 31 people, and Elevator-D moves downwards and takes a total number of 19 people. From Table 7, we can also find that the lowest floor reserved by the user is the 22nd floor, and the highest floor is the 40th floor. In the downlink reservation data, the lowest floor number of the destination is the 1st floor, and the highest floor is the 40th floor. The tasks assigned by the elevator group to the point Elevator-CD can be represented by the moving matrix and , for which elements are shown in the following, Table 7.In the second half cycle of the first movement, Elevator-CD will be exchanged with the remaining tasks of the other party’s previous transportation (Table 7) as the transportation task of this time (Table 8), and the transportation direction is also opposite to that of the last time. We can use equation relations and to represent the task exchange process. It is also easy to observe the synergy of Elevator-CD from the task table. The task volume of the two is basically the same, which can also shorten the total operation time of elevator group. When the tasks in Table 8 are completed, it indicates that the reservation task in the floor area in the elevator has been completed. After running the scheduling tasks in Table 7 and Table 8, it is equivalent to finishing a complete cycle. Elevator-C carries 13 people in total, and Elevator-D carries 11 people in total. The task balance rate is . The remaining dispatching tasks of elevator CD are shown in the Table 8 below.
- (3)
- High-rise areaAs for the high-rise area, the high floor range is from the 41st to 60th floors, which is mainly completed by Elevator-EF. The initial position of Elevator-E stays at the 41st floor, and the initial position of Elevator-F stays at the 60th floor. Firstly, the uplink and downlink reservation information are divided by the index value of k. The lowest reservation floor number for passengers is 41, and the highest reservation floor number is 60. When the high-floor elevator passes through the 2–40 floors, it runs very fast because those floors are prohibited uplink reservations. Floors 41–60 are the normal working stage, and the speed remains stable. The users who need to go upstairs and downstairs are random, and the total number of requests is the same. The high floor reservation data is as follows Table 9.We can get the solution of Elevator-EF by the matrix iterative optimization algorithm. The data in Table 9 are transformed into the waiting matrix and . Due to the limited space of the elevator, it can carry up to 15 people at a time. Therefore, it is impossible for the elevator EF to carry all tasks in a single movement, and the remaining tasks are operated by another elevator. Combining load limit and time constraints to select some users taking the elevator, matrix and of Elevator-EF can be obtained. The total number of 22 people are carried by Elevator-E when Elevator-E move upward. During the whole process of Elevator-F descending, the total number of 17 passengers are carried by Elevator-F, the results of Elevator-EF carrying task are shown in Table 10.It is impossible to complete all high floor reservation tasks by relying solely on elevator E, which requires coordination between elevator F. First, when elevator E is started, it is found that there are still remaining tasks that are not completed, and the remaining tasks are left to F to complete. Therefore, elevator F is also needed to assist in completing the remaining tasks of elevator E and satisfy the relations . Then, we combined the matrix iterative algorithm of this article to finish the remaining tasks, and a complete task of F elevator is as follows, in Table 11. By calculating the number of people carried by elevator EF, the equilibrium rate is . The total 6 elevators are divided into 3 groups according to the floor range. According to the number equilibrium efficiency formula proposed in this paper, we calculate that the overall equilibrium efficiency of the Example 3 elevator group is .
4. Discussion
- (1)
- The main characteristics of a single elevator are low floors, low density of people flow, low efficiencies, and relatively simple task management, while the main characteristics of elevator groups are: high floors, high density of people flow, high work efficiency, and synergy between elevators.
- (2)
- Single elevator task distribution belongs to a one-to-one relationship, and elevator group task assignment belongs to a one-to-many relationship.
- (3)
- For the same task, the complexity of a single elevator and an elevator group is obviously different. A single elevator needs to consider the total number of reservations p, the total number of floor destinations k, and the round-trip cycle is . means to reach the i-th destination floor how many people are going out, and the complex formula of a single elevator is:
5. Conlusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Cortés, P.; Muñuzuri, J.; Vázquez-Ledesma, A.; Onieva, L. Double deck elevator group control systems using evolutionary algorithms: Interfloor and lunchpeak traffic analysis. Comput. Ind. Eng. 2021, 155, 107190. [Google Scholar] [CrossRef]
- D’Ariano, A.; Pacciarelli, D.; Pranzo, M. A branch and bound algorithm for scheduling trains in a railway network. Eur. J. Oper. Res. 2007, 183, 2643–2657. [Google Scholar] [CrossRef]
- Hsieh, M.Y.; Ding, J.W. Dynamic scheduling with energy-efficient transmissions in hierarchical wireless sensor networks. Telecommun. Syst. Model. Anal. Des. Manag. 2015, 60, 95–105. [Google Scholar] [CrossRef]
- Gardner, K.; Righter, R. Product Forms for FCFS Queueing Models with Arbitrary Server-Job Compatibilities: An Overview. Queueing Syst. 2020, 96, 3–51. [Google Scholar] [CrossRef]
- Nail, A.; Caglar, T.; Mark, G.; Faith, E. Disk scheduling with shortest cumulative access time first algorithms. Urkish J. Electr. Eng. Comput. Sci. 2017, 25, 3367–3380. [Google Scholar]
- Lee, M.; Kim, K.; Park, C. Real-Time Disk Scheduling Algorithms Based on the Two-Way SCAN Technique. In Proceedings of the 2009 International Conference on Scalable Computing and Communications, Eighth International Conference on Embedded Computing, Dalian, China, 25–27 September 2009; IEEE Computer Society Press: Los Alamitos, CA, USA, 2009; pp. 137–142. [Google Scholar]
- Chen, T.S.; Yang, W.P.; Lee, R.C.T. Amortized analysis of some disk scheduling algorithms: SSTF, SCAN, and N-StepSCAN. BIT Numer. Math. 1992, 32, 546–558. [Google Scholar] [CrossRef]
- Ding, B.; Zhang, Y.-M.; Peng, X.-Y.; Li, Q.-C.; Tang, H.-Y. A hybrid approach for the analysis and prediction of elevator passenger flow in an office building. Autom. Constr. 2013, 35, 69–78. [Google Scholar] [CrossRef]
- Wang, S.; Gong, X.; Song, M.; Fei, C.Y.; Quaadgras, S.; Peng, J.; Zou, P.; Chen, J.; Zhang, W.; Jiao, R.J. Smart dispatching and optimal elevator group control through real-time occupancy-aware deep learning of usage patterns. Adv. Eng. Inform. 2021, 48, 101286. [Google Scholar] [CrossRef]
- Nagatani, T. Complex motion of elevators in piecewise map model combined with circle map. Phys. Lett. A 2013, 377, 34–36. [Google Scholar] [CrossRef]
- So, A.; Al-Sharif, L. Calculation of the elevator round-trip time under destination group control using offline batch allocations and real-time allocations. J. Build. Eng. 2019, 22, 549–561. [Google Scholar] [CrossRef]
- So, A.; Al-Sharif, L.; Chan, W.L. Analytical Round-Trip Time Estimation of a Three-Dimensional Elevator System Based on Exact Stopping Position Identification. J. Build. Eng. 2020, 31, 101390. [Google Scholar] [CrossRef]
- Zubair, M.U.; Zhang, X. Explicit data-driven prediction model of annual energy consumed by elevators in residential buildings. J. Build. Eng. 2020, 31, 101278. [Google Scholar] [CrossRef]
- Blázquez-García, A.; Conde, A.; Milo, A.; Sánchez, R.; Barrio, I. Short-term office building elevator energy consumption forecast using SARIMA. J. Build. Perform. Simul. 2020, 13, 69–78. [Google Scholar] [CrossRef]
- Tukia, T.; Uimonen, S.; Siikonen, M.-L.; Donghi, C.; Lehtonen, M. High-resolution modeling of elevator power consumption. J. Build. Eng. 2018, 18, 210–219. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Zong, Q. Energy-saving scheduling optimization under up-peak traffic for group elevator system in building. J. Build. Eng. 2013, 66, 495–504. [Google Scholar] [CrossRef]
- Munoz, D.M.; Llanos, C.H.; Ayala-Rincon, M.; van Els, R.H. Distributed approach to group control of elevator systems using fuzzy logic and FPGA implementation of dispatching algorithms. Eng. Appl. Artif. Intell. 2008, 21, 1309–1320. [Google Scholar] [CrossRef]
- Jamaludin, J.; Rahim, N.A.; Hew, W.P. Development of a self-tuning fuzzy logic controller for intelligent control of elevator systems. Eng. Appl. Artif. Intell. 2009, 22, 1167–1178. [Google Scholar] [CrossRef]
- Zhu, D.; Qian, H.; Zhang, T.; Shan, G.; Wu, L. The Fuzzy Logic Inference Decision System of Elevator Group Supervisory Control. IFAC Proc. Vol. 1998, 31, 117–120. [Google Scholar]
- Bolat, B.; Altun, O.; Cortés, P. A particle swarm optimization algorithm for optimal car-call allocation in elevator group control systems. Appl. Soft Comput. 2013, 31, 2633–2642. [Google Scholar] [CrossRef]
- Tartan, E.O.; Ciftlikli, C. A Genetic Algorithm Based Elevator Dispatching Method For Waiting Time Optimization. IFAC Pap. OnLine 2016, 49, 424–429. [Google Scholar] [CrossRef]
- Cortés, P.; Larrañeta, J.; Onieva, L. Genetic algorithm for controllers in elevator groups: Analysis and simulation during lunchpeak traffic. Appl. Soft Comput. 2004, 4, 159–174. [Google Scholar] [CrossRef]
- Bolat, B.; Cortés, P. Genetic and tabu search approaches for optimizing the hall call—Car allocation problem in elevator group systems. Appl. Soft Comput. 2011, 11, 1792–1800. [Google Scholar] [CrossRef]
- Chen, J.; Huang, G.Q.; Wang, J.-Q.; Yang, C. A cooperative approach to service booking and scheduling in cloud manufacturing. J. Oper. Res. 2019, 273, 861–873. [Google Scholar] [CrossRef]
- Dai, J.; Geng, N.; Xie, X. Dynamic advance scheduling of outpatient appointments in a moving booking window, European. J. Oper. Res. 2021, 292, 622–632. [Google Scholar] [CrossRef]
- Sun, Y.; Jiang, Z.; Gu, J.; Zhou, M.; Li, Y.; Zhang, L. Analyzing high speed rail passengers’ train choices based on new online booking data in China. Transp. Res. Part C Emerg. Technol. 2018, 97, 96–113. [Google Scholar] [CrossRef]
- Zhao, N.; Luo, L.; Zhang, S.; Lodewijks, G. An efficient simulation model for rack design in multi-elevator shuttle-based storage and retrieval system. Simul. Model. Pract. Theory 2016, 67, 100–116. [Google Scholar]
- Ahmadi, A.; Jokar, M.R. An efficient multiple-stage mathematical programming method for advanced single and multi-floor facility layout problems. Appl. Math. Model. 2016, 40, 5605–5620. [Google Scholar] [CrossRef]
- Chandakas, E. On demand forecasting of demand-responsive paratransit services with prior reservations. Transp. Res. Part C Emerg. Technol. 2020, 120, 102817. [Google Scholar] [CrossRef]
- Bharadwaj, R.; Koul, S.K. Study of the influence of human subject on the indoor channel using compact UWB directive/omni-directional antennas for wireless sensor network applications. Ad Hoc Netw. 2021, 118, 102521. [Google Scholar] [CrossRef]
- Waqar, A.; Ahmad, I.; Habibi, D.; Phung, Q.V. Analysis of GPS and UWB positioning system for athlete tracking. Meas. Sens. 2021, 14, 100036. [Google Scholar] [CrossRef]
- Zhou, Z.; Rui, Y.; Cai, X.; Lu, J. Constrained total least squares method using TDOA measurements for jointly estimating acoustic emission source and wave velocity. Measurement 2021, 182, 109758. [Google Scholar] [CrossRef]
- Friese, P.; Rambau, J. Online-optimization of multi-elevator transport systems with reoptimization algorithms based on set-partitioning models. Discret. Appl. Math. 2006, 154, 1908–1931. [Google Scholar] [CrossRef] [Green Version]
- Zhou, B.; Chu, D.; Saak, J.; Xiao, M. Matrix equations with application to control theory. J. Frankl. Inst. 2016, 353, 971–973. [Google Scholar] [CrossRef]
- Zhang, D.; Wu, X. Robust and discrete matrix factorization hashing for cross-modal retrieval. Pattern Recognit. 2022, 122, 108343. [Google Scholar] [CrossRef]
- Dai, Y.; Li, Y.; Sun, B.; Liu, L.J. Skip-connected network with gram matrix for product image retrieval. Neurocomputing 2021, 447, 307–318. [Google Scholar] [CrossRef]
- Brum, A.; Ruiz, R.; Ritt, M. Automatic generation of iterated greedy algorithms for the non-permutation flow shop scheduling problem with total completion time minimization. Comput. Ind. Eng. 2022, 163, 107843. [Google Scholar] [CrossRef]
- Tang, H.T.; Chen, R.; Li, Y.B.; Peng, Z.; Guo, S.; Du, Y. Flexible job-shop scheduling with tolerated time interval and limited starting time interval based on hybrid discrete PSO-SA: An application from a casting workshop. Appl. Soft Comput. 2019, 78, 176–194. [Google Scholar] [CrossRef]
- Violettas, G.; Simoglou, G.; Petridou, S.; Mamatas, L. A Softwarized Intrusion Detection System for the RPL-based Internet of Things networks. Future Gener. Comput. Syst. 2021, 125, 698–714. [Google Scholar] [CrossRef]
- Singh, I.; Kumar, N.; Sharma, S.K.G.T.; Kumar, V.; Singhal, S. Database intrusion detection using role and user behavior based risk assessment. J. Inf. Secur. Appl. 2020, 55, 102654. [Google Scholar] [CrossRef]
- Kwon, O.; Lee, E.; Bahn, H. Sensor-aware elevator scheduling for smart building environments. Build. Environ. 2014, 72, 332–342. [Google Scholar] [CrossRef]
- Yamauchi, T.; Ide, R.; Sugawara, T. Fair and effective elevator car dispatching method in elevator group control system using cameras. Procedia Comput. Sci. 2019, 159, 455–464. [Google Scholar] [CrossRef]
- Debnath, J.K.; Serpen, G. Real-Time Optimal Scheduling of a Group of Elevators in a Multi-Story Robotic Fully-Automated Parking Structure. Procedia Comput. Sci. 2015, 61, 507–514. [Google Scholar] [CrossRef] [Green Version]
- Vodopija, A.; Stork, J.; Thomas, B.B.; Filipič, B. Elevator group control as a constrained multiobjective optimization problem. Appl. Soft Comput. 2021, 108277. [Google Scholar] [CrossRef]
- Su, X.; Tao, L.; Liu, H.; Wang, L.; Suo, M. Real-time hierarchical risk assessment for UAVs based on recurrent fusion autoencoder and dynamic FCE: A hybrid framework. Appl. Soft Comput. 2021, 106, 107286. [Google Scholar] [CrossRef]
- Sun, J.; Zhao, Q.; Luh, P.B. Optimization of Group Elevator Scheduling with Advance Information. IEEE Trans. Autom. Sci. Eng. 2010, 7, 352–363. [Google Scholar] [CrossRef]
- Potts, C.N.; Kovalyov, M.Y. Scheduling with batching: A review. Eur. J. Oper. Res. 2000, 120, 228–249. [Google Scholar] [CrossRef]
- Blakeley, F.; Argüello, B.; Cao, B.; Hall, W.; Knolmajer, J. Optimizing Periodic Maintenance Operations for Schindler Elevator Corporation. J. Appl. Anal. 2003, 33, 67–79. [Google Scholar] [CrossRef]
- Dalala, Z.; Alwahsh, T.; Saadeh, O. Energy recovery control in elevators with automatic rescue application. J. Energy Storag. 2021, 43, 103168. [Google Scholar] [CrossRef]
- Tateyama, M.; Tanaka, K. The latest technology of the elevator for ultra-high-speed, large capacity, and ultra-high-rise. Proc. Transp. Logist. Conf. 2013, 22, 27–30. [Google Scholar] [CrossRef]
- Sorsa, J. Real-time algorithms for the bilevel double-deck elevator dispatching problem. J. Comput. Optim. 2019, 7, 79–122. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable Name | Explanation & Description | Variable Name | Explanation & Description |
|---|---|---|---|
| Waiting matrix | The actual total waiting time matrix of users m. | ||
| Uplink waiting matrix | Uplink waiting index matrix | ||
| Downlink waiting matrix | Downlink waiting index matrix | ||
| Moving matrix | Entering matrix | ||
| Exiting matrix | Remaining matrix | ||
| Capacity matrix | The distance difference between the mobile tag to the i-th base station and the first base station. | ||
| The average time of users i arrive at elevator j. | The distance from the i-th user to the j-th elevator. | ||
| is a time with elevator move to current i-th layer. | Time takes for user m from the place of submission to the elevator waiting area. | ||
| means a actual total waiting time of users. | When elevator to the k-th floor, the total number of remaining space of elevator. | ||
| The elevator acceptable reference time of up. | The elevator acceptable reference time of down. | ||
| contains the reservation starting floor set and the destination floor set . | The elevator space judgment functions in the initial state. | ||
| The elevator space judgment functions at the middle k-th floor. | Maximum number of people on elevator load. | ||
| The equilibrium rate of elevator group in a one cycle is based on the total number of users. | The equilibrium rate of elevator group in a one cycle is based on the total running time. | ||
| The complexity of a single elevator. | The complexity of the elevator group. |
| Initial floor | 11 | 11 | 10 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | |
| Time limit | 4 | 4 | 9 | 15 | 20 | 25 | 30 | 35 | 40 | 45 | |
| Destination floor | 10 | 8 | 7 | 5 | 3 | 1 | 1 | 2 | 1 | 1 | |
| Task1 | People Number | 9 | 6 | 9 | 7 | 8 | 1 | 1 | 7 | 8 | 6 |
| Down (k) | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | |
| Initial floor | 3 | 4 | 5 | 6 | 7 | 9 | 10 | ||||
| Time limit | 6 | 11 | 16 | 21 | 26 | 32 | 37 | ||||
| Destination floor | 5 | 8 | 8 | 9 | 11 | 11 | 11 | ||||
| Task2 | People Number | 8 | 8 | 2 | 7 | 2 | 1 | 1 | |||
| 2 | 2 | 2 | 2 | 2 | 2 | 2 |
| Initial floor | 18 | 16 | 15 | 14 | 12 | 10 | 9 | 7 | 6 | 5 | 4 | |
| Time limit | 6 | 12 | 17 | 22 | 32 | 42 | 47 | 57 | 62 | 67 | 72 | |
| Destination floor | 1 | 13 | 11 | 10 | 8 | 7 | 4 | 1 | 2 | 1 | 1 | |
| Task1 | People Number | 1 | 6 | 7 | 3 | 5 | 4 | 2 | 7 | 2 | 6 | 3 |
| (A-B) | Down (k) | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 |
| Initial floor | 1 | 4 | 5 | 7 | 10 | 12 | 14 | 15 | 16 | 17 | 18 | |
| Time limit | 4 | 11 | 16 | 22 | 27 | 33 | 45 | 50 | 55 | 60 | 65 | |
| Destination floor | 5 | 8 | 10 | 12 | 15 | 19 | 20 | 19 | 20 | 20 | 20 | |
| Task2 | People Number | 5 | 3 | 2 | 4 | 2 | 4 | 1 | 2 | 1 | 1 | 2 |
| (A-B) | Up (k) | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 |
| i | 1 | 4 | 5 | 7 | 10 | 12 | 14 | 15 | 16 | 18 | ||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| j | 18 | 8 | 10 | 12 | 15 | 19 | 20 | 19 | 20 | 20 | ||
| k | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | ||
| P | 9 | 2 | 1 | 3 | 2 | 4 | 1 | 2 | 1 | 2 | ||
| i | 18 | 16 | 15 | 14 | 12 | 10 | 9 | 7 | 6 | 5 | 4 | |
| j | 1 | 13 | 11 | 10 | 8 | 7 | 4 | 1 | 2 | 1 | 1 | |
| k | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | |
| P | 1 | 6 | 7 | 1 | 5 | 4 | 2 | 7 | 2 | 3 | 2 |
| i | 7 | 14 | 16 | 17 | i | 4 | 5 | 14 | ||
|---|---|---|---|---|---|---|---|---|---|---|
| j | 12 | 20 | 20 | 20 | j | 1 | 1 | 10 | ||
| k | 2 | 2 | 2 | 2 | k | 1 | 1 | 1 | ||
| P | 4 | 1 | 1 | 1 | P | 1 | 3 | 2 |
| Initial floor | 40 | 38 | 35 | 31 | 28 | 26 | 25 | 24 | 23 | 22 | 20 | |
| Time limit | 4 | 10 | 17 | 25 | 32 | 38 | 43 | 48 | 53 | 58 | 64 | |
| Destination floor | 18 | 15 | 22 | 19 | 25 | 17 | 14 | 12 | 8 | 1 | 1 | |
| Task3 | People Number | 1 | 5 | 2 | 1 | 2 | 4 | 2 | 6 | 4 | 3 | 2 |
| (C-D) | Down (k) | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 |
| Initial floor | 1 | 4 | 15 | 20 | 22 | 24 | 29 | 31 | 33 | 34 | 36 | |
| Time limit | 4 | 11 | 26 | 35 | 41 | 47 | 60 | 70 | 76 | 81 | 91 | |
| Destination floor | 22 | 28 | 30 | 33 | 35 | 35 | 37 | 38 | 39 | 40 | 40 | |
| Task4 | People Number | 9 | 5 | 2 | 5 | 1 | 6 | 3 | 1 | 5 | 4 | 1 |
| (C-D) | Up (k) | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 |
| i | 1 | 4 | 15 | 22 | 24 | 29 | 31 | 33 | 36 | |
|---|---|---|---|---|---|---|---|---|---|---|
| j | 22 | 28 | 30 | 35 | 35 | 37 | 38 | 39 | 40 | |
| k | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | |
| P | 9 | 5 | 1 | 1 | 6 | 3 | 1 | 4 | 1 | |
| i | 22 | 25 | 26 | 28 | 31 | 35 | 38 | 40 | ||
| j | 1 | 14 | 17 | 25 | 19 | 22 | 15 | 18 | ||
| k | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | ||
| P | 2 | 2 | 4 | 2 | 1 | 2 | 5 | 1 |
| i | 15 | 20 | 33 | 34 | i | 20 | 22 | 23 | 24 | ||
|---|---|---|---|---|---|---|---|---|---|---|---|
| j | 30 | 33 | 39 | 40 | j | 1 | 1 | 8 | 12 | ||
| k | 2 | 2 | 2 | 2 | k | 1 | 1 | 1 | 1 | ||
| P | 1 | 5 | 1 | 4 | P | 2 | 1 | 4 | 6 |
| Initial floor | 60 | 58 | 57 | 52 | 51 | 50 | 48 | 46 | 43 | 40 | 40 | |
| Time limit | red4 | 10 | 15 | 24 | 29 | 34 | 40 | 46 | 53 | 60 | 60 | |
| Destination floor | 1 | 2 | 4 | 2 | 3 | 1 | 1 | 5 | 5 | 1 | 2 | |
| Task5 | People Number | 1 | 2 | 4 | 2 | 3 | 1 | 1 | 5 | 5 | 1 | 2 |
| (E-F) | Down (k) | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 |
| Initial floor | 1 | 4 | 15 | 17 | 24 | 30 | 32 | 39 | 41 | 42 | 45 | |
| Time limit | 4 | 11 | 26 | 32 | 43 | 53 | 59 | 70 | 76 | 81 | 92 | |
| Destination floor | 41 | 48 | 44 | 52 | 45 | 39 | 50 | 51 | 59 | 60 | 60 | |
| Task6 | People Number | 2 | 2 | 4 | 1 | 1 | 1 | 7 | 3 | 1 | 1 | 6 |
| (E-F) | Up (k) | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 |
| i | 1 | 4 | 15 | 24 | 30 | 32 | 39 | 41 | 42 | ||
|---|---|---|---|---|---|---|---|---|---|---|---|
| j | 41 | 48 | 44 | 45 | 39 | 50 | 51 | 59 | 60 | 60 | |
| k | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | |
| P | 2 | 2 | 4 | 1 | 1 | 4 | 1 | 1 | 1 | 5 | |
| i | 60 | 58 | 57 | 52 | 51 | 50 | 48 | 46 | 43 | ||
| j | 1 | 19 | 31 | 43 | 17 | 33 | 34 | 30 | 22 | ||
| k | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | ||
| P | 1 | 2 | 4 | 2 | 3 | 1 | 1 | 1 | 2 |
| i | 32 | 39 | 45 | i | 46 | 43 | 40 | 40 | ||
|---|---|---|---|---|---|---|---|---|---|---|
| j | 50 | 51 | 60 | j | 30 | 22 | 1 | 18 | ||
| k | 2 | 2 | 2 | k | 1 | 1 | 1 | 1 | ||
| 3 | 2 | 1 | P | 4 | 3 | 2 | 1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, W.; Zheng, B.; Liu, J.; Li, L.; Ren, X. A Real-Time Matrix Iterative Optimization Algorithm of Booking Elevator Group and Numerical Simulation Formed by Multi-Sensor Combination. Electronics 2021, 10, 3179. https://doi.org/10.3390/electronics10243179
Chen W, Zheng B, Liu J, Li L, Ren X. A Real-Time Matrix Iterative Optimization Algorithm of Booking Elevator Group and Numerical Simulation Formed by Multi-Sensor Combination. Electronics. 2021; 10(24):3179. https://doi.org/10.3390/electronics10243179
Chicago/Turabian StyleChen, Wenxing, Baojuan Zheng, Jiaying Liu, Lianyan Li, and Xiaobin Ren. 2021. "A Real-Time Matrix Iterative Optimization Algorithm of Booking Elevator Group and Numerical Simulation Formed by Multi-Sensor Combination" Electronics 10, no. 24: 3179. https://doi.org/10.3390/electronics10243179