
State Estimation in Electric Power Systems Using an Approach Based on a Weighted Least Squares Non-Linear Programming Modeling

 , , ,
, , ,  and
and 
Abstract
:1. Introduction
- The first strategy consists of a mathematical programming approach labeled as classical non-linear programming model (classical NLPM). Such model emulates the formulation and iterative process of the WLS state estimator.
- The second strategy is a new mathematical model based on some modifications of the classical NLPM. This mathematical model is used within a new state estimation procedure that allows reducing the negative impact on the estimated results of conventional state estimation studies due to errors presented in the set of measurements. This strategy is labeled as New NLPM.
2. State Estimation in EPS
3. Representation of the State Estimation Problem as a Mathematical Programming Model
3.1. Classical NLPM
- Active and reactive power injection measurements:
- Active power flow measurements:
- Reactive power flow measurements:
- Voltage measurements:
3.2. New NLPM
- Neglect the presence of errors in : For a specific measurement , and , and the objective function .
- Consider the presence of errors in : For a specific measurement , and , and the objective function .
4. Numerical Results
4.1. Preliminary Considerations
4.2. Results with a 5-Bus Didactic Power System
4.2.1. No Bad Data in the Measurement Set
4.2.2. Multiple Bad Data Measurements in the Measurement Set
4.3. IEEE Power Systems
4.3.1. No Bad Data in the Measurement Set
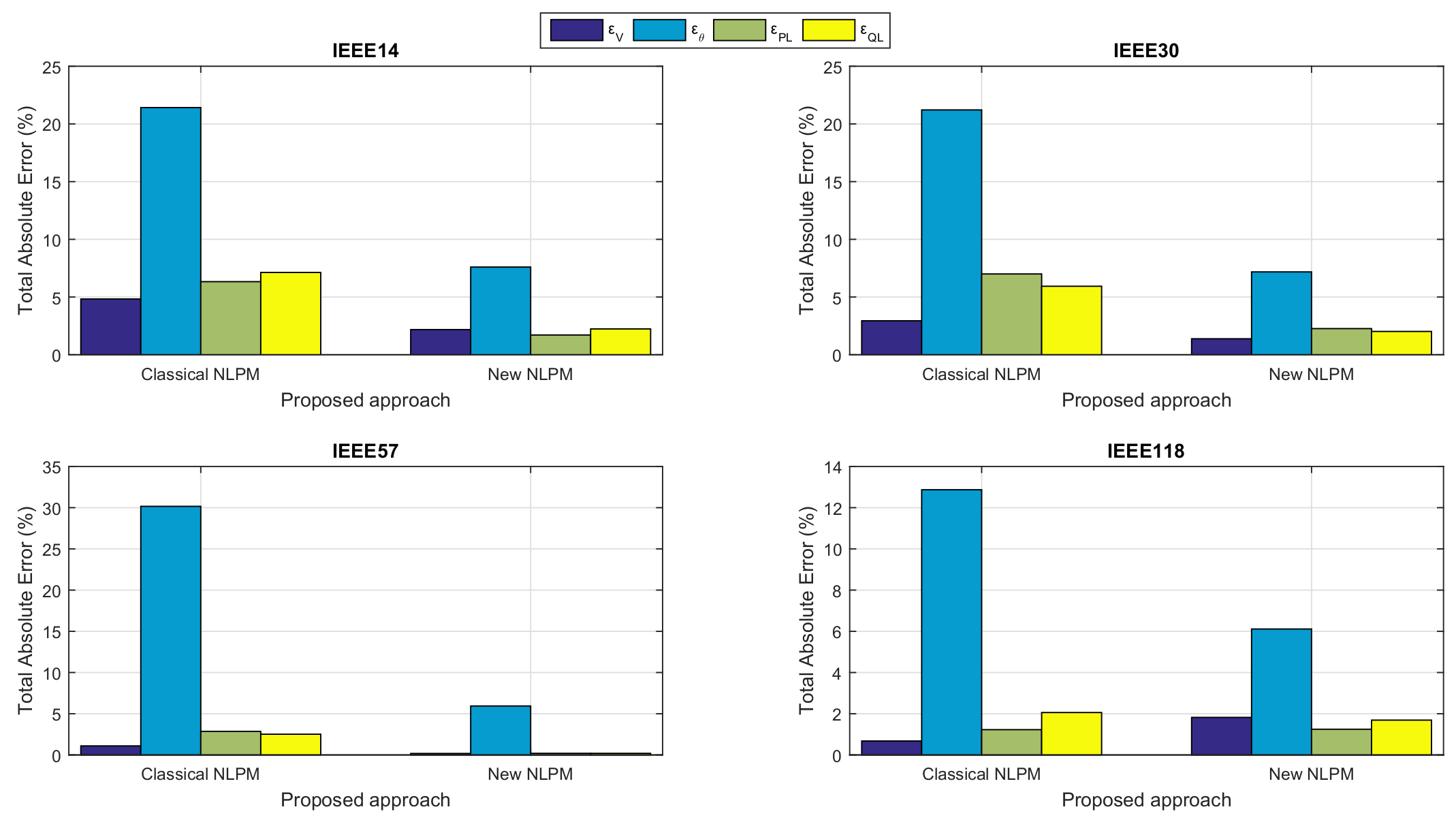
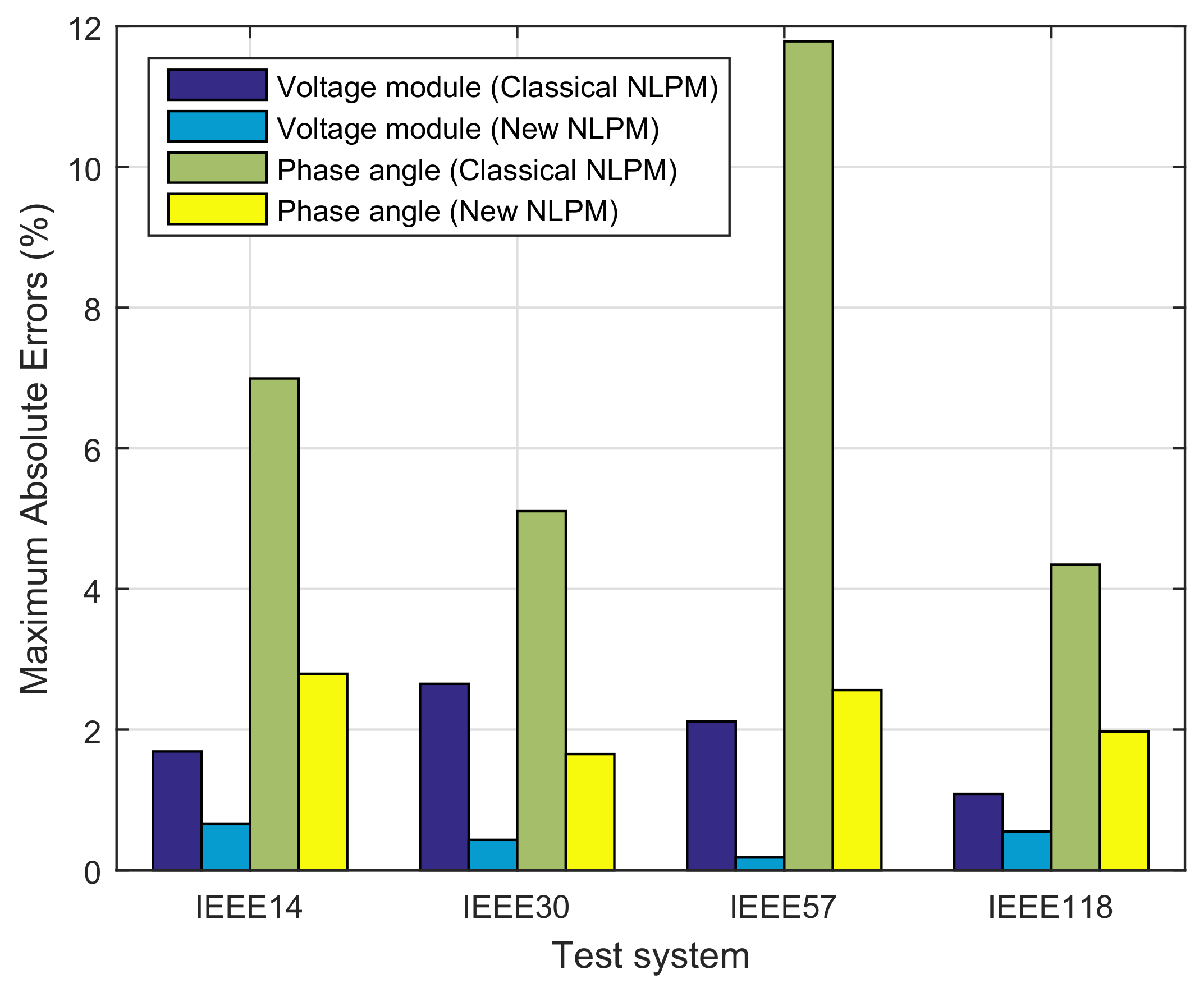
4.3.2. Multiple Bad Data Measurements in the Measurement Set
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Sets: | |
| Set of system’s measurements. | |
| Set of system’s buses. | |
| Set of system’s transmission lines. | |
| Parameters: | |
| Line conductance at node i and j. | |
| Line susceptance at node i and j. | |
| Line shunt susceptance at node i and j. | |
| Shunt susceptance at node i. | |
| Transformer tap ratio at node i and j. | |
| Phase-shifting transformer angle at node i and j. | |
| Conductance of the Ybus matrix. | |
| Susceptance of the Ybus matrix. | |
| Measurement m located at node i and j. | |
| Weight of the measurement m at node i and j. | |
| p | Allowed mismatch percentage. |
| Tolerance of the iterative state estimator procedure. | |
| e | Random errors added in measurement set. |
| Variables: | |
| State variables of the system. | |
| Least squares function. | |
| Residual value of the measurement m located at node i and j. | |
| Non-linear measurement functions. | |
| Measurement mismatch. | |
| Voltage module and phase angle at node i. | |
| Active power flow of branch . | |
| Reactive power flow of branch . | |
| Total active and reactive power loss. |
References
- Monticelli, A. State Estimation in Electric Power Systems. A Generalized Approach; Kluwer Academic Publishers: Boston, MA, USA, 1999. [Google Scholar]
- Abur, A.; Exposito, A. Power System State Estimation: Theory and Implementation; Marcel Dekker: New York, NY, USA, 2004. [Google Scholar]
- Primadianto, A.; Lu, C.N. A Review on Distribution System State Estimation. IEEE Trans. Power Syst. 2017, 32, 3875–3883. [Google Scholar] [CrossRef]
- Mili, L.; Cutsem, T.V.; Ribbens-Pavella, M. Bad Data Identification Methods In Power System State Estimation-A Comparative Study. IEEE Trans. Power Appar. Syst. 1985, PAS-104, 3037–3049. [Google Scholar] [CrossRef]
- Monticelli, A. Testing equality constraint hypotheses in weighted least squares state estimators. IEEE Trans. Power Syst. 2000, 15, 950–954. [Google Scholar] [CrossRef]
- Zhu, H.; Giannakis, G.B. Power System Nonlinear State Estimation Using Distributed Semidefinite Programming. IEEE J. Sel. Top. Signal Process. 2014, 8, 1039–1050. [Google Scholar] [CrossRef]
- Levinbook, Y.; Wong, T.F. State Estimation With Initial State Uncertainty. IEEE Trans. Inf. Theory 2008, 54, 235–254. [Google Scholar] [CrossRef] [Green Version]
- Zhao, J.; Netto, M.; Huang, Z.; Yu, S.S.; Gómez-Expósito, A.; Wang, S.; Kamwa, I.; Akhlaghi, S.; Mili, L.; Terzija, V.; et al. Roles of Dynamic State Estimation in Power System Modeling, Monitoring and Operation. IEEE Trans. Power Syst. 2021, 36, 2462–2472. [Google Scholar] [CrossRef]
- Chen, Y.; Chen, H.; Jiao, Y.; Ma, J.; Lin, Y. Data-driven Robust State Estimation Through Off-line Learning and On-line Matching. J. Mod. Power Syst. Clean Energy 2021, 9, 897–909. [Google Scholar] [CrossRef]
- Caro, E.; Conejo, A. State estimation via mathematical programming: A comparison of different estimation algorithms. IET Gener. Transm. Distrib. 2012, 6, 545–553. [Google Scholar] [CrossRef]
- Chen, Y.; Liu, F.; Mei, S.; Ma, J. A Robust WLAV State Estimation Using Optimal Transformations. IEEE Trans. Power Syst. 2015, 30, 2190–2191. [Google Scholar] [CrossRef]
- Filho, M.; da Silva, A.; Falcao, D. Bibliography on power system state estimation (1968-1989). IEEE Trans. Power Syst. 1990, 5, 950–961. [Google Scholar] [CrossRef]
- Florez, H.; Carreno, E.; Rider, M.; Mantonani, J. Distflow based state estimation for power distribution networks. Energy Syst. 2018, 9, 154–162. [Google Scholar] [CrossRef] [Green Version]
- Holten, L.; Gjelsvik, A.; Aam, S.; Wu, F.; Liu, W.H. Comparison of different methods for state estimation. IEEE Trans. Power Syst. 1988, 3, 1798–1806. [Google Scholar] [CrossRef]
- Mili, L.; Cheniae, M.; Rousseeuw, P. Robust state estimation of electric power systems. IEEE Trans. Circuits Syst. Fundam. Theory Appl. 1994, 41, 349–358. [Google Scholar] [CrossRef]
- Gou, B. Generalized Integer Linear Programming Formulation for Optimal PMU Placement. IEEE Trans. Power Syst. 2008, 23, 1099–1104. [Google Scholar] [CrossRef]
- Nazari-Haris, M.; Mohammadi-ivatloo, B. Optimal placement of phasor measurement units to attain power system observability utilizing an upgraded binary harmony search algorithm. Energy Syst. 2015, 6, 201–220. [Google Scholar] [CrossRef]
- Habiballah, I.; Irving, M. Observability analysis for state estimation using linear programming. IEE Proc. Gener. Transm. Distrib. 2001, 148, 142–145. [Google Scholar] [CrossRef]
- Chen, Y.; Ma, J. A mixed-integer linear programming approach for robust state estimation. J. Mod. Power Syst. Clean Energy 2014, 2, 366–373. [Google Scholar] [CrossRef] [Green Version]
- Zimmerman, R.D.; Murillo-Sánchez, C.E.; Thomas, R.J. MATPOWER: Steady-State Operations, Planning, and Analysis Tools for Power Systems Research and Education. IEEE Trans. Power Syst. 2011, 26, 12–19. [Google Scholar] [CrossRef] [Green Version]
- Wu, F.F. Power system state estimation: A survey. Int. J. Electr. Power Energy Syst. 1990, 12, 80–87. [Google Scholar] [CrossRef]
- Zarco, P.; Gómez-Espósito, A. Estimación de Estado y de Parámetros en Redes Eléctricas; Universidad de Sevilla: Sevilla, Spain, 1999. [Google Scholar]
- Caro, E.; Conejo, A.J.; Minguez, R.; Zima, M.; Andersson, G. Multiple Bad Data Identification Considering Measurement Dependencies. IEEE Trans. Power Syst. 2011, 26, 1953–1961. [Google Scholar] [CrossRef]
- Fourer, R.; Gay, D.; Kernighan, B. AMPL: A Modeling Language for Mathematical Programming; Duxbury Press: Pacific Grove, CA, USA, 2002. [Google Scholar]
- Knitro. Knitro for AMPL. 2021. Available online: https://ampl.com/products/solvers/solvers-we-sell/knitro/ (accessed on 5 April 2021).
- Chen, J.; Abur, A. Placement of PMUs to Enable Bad Data Detection in State Estimation. IEEE Trans. Power Syst. 2006, 21, 1608–1615. [Google Scholar] [CrossRef]
- Stagg, G.; El-Abiad, A. Computer Methods in Power System Analysis; Mc Graw Hill: New York, NY, USA, 1968. [Google Scholar]
- University of Washington. Power Systems Test Case Archive. 2021. Available online: http://www2.ee.washington.edu/research/pstca (accessed on 2 March 2021).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bus | Matpower Load Flow Analysis | Classical NLPM | New NLPM | |||
|---|---|---|---|---|---|---|
| 1 | 1.0600 | 0.0000 | 1.0600 | 0.0000 | 1.0600 | 0.0000 |
| 2 | 1.0474 | −2.8063 | 1.0474 | −2.8063 | 1.0474 | −2.8063 |
| 3 | 1.0242 | −4.9969 | 1.0242 | −4.9969 | 1.0242 | −4.9969 |
| 4 | 1.0236 | −5.3291 | 1.0236 | −5.3291 | 1.0236 | −5.3291 |
| 5 | 1.0179 | −6.1502 | 1.0179 | −6.1502 | 1.0179 | −6.1502 |
| Matpower Load Flow Analysis | Classical NLPM | New NLPM | |
|---|---|---|---|
| (MW) | 4.5868 | 4.5867 | 4.5867 |
| (MVAr) | 13.7605 | 13.7600 | 13.7600 |
| Bus | Matpower Load Flow Analysis | Classical NLPM | New NLPM | |||
|---|---|---|---|---|---|---|
| 1 | 1.0600 | 0.0000 | 1.0633 | 0.0000 | 1.0605 | 0.0000 |
| 2 | 1.0474 | −2.8063 | 1.0504 | −2.8036 | 1.0481 | −2.7945 |
| 3 | 1.0242 | −4.9969 | 1.0272 | −5.0240 | 1.0246 | −5.0096 |
| 4 | 1.0236 | −5.3291 | 1.0266 | −5.3584 | 1.0240 | −5.3426 |
| 5 | 1.0179 | −6.1502 | 1.0206 | −6.1902 | 1.0186 | −6.1699 |
| Matpower Load Flow Analysis | Classical NLPM | New NLPM | |
|---|---|---|---|
| (MW) | 4.5868 | 4.6718 | 4.6188 |
| (MVAr) | 13.7605 | 14.0154 | 13.8564 |
| Test System | Power Losses | Matpower Load Flow Analysis | Classical NLPM | New NLPM |
|---|---|---|---|---|
| IEEE-14 | (MW) | 13.3932 | 13.3929 | 13.3931 |
| (MVAr) | 54.5372 | 54.5358 | 54.5362 | |
| IEEE-30 | (MW) | 17.5518 | 17.5488 | 17.5491 |
| (MVAr) | 67.6996 | 67.6889 | 67.6900 | |
| IEEE-57 | (MW) | 27.8611 | 27.8640 | 27.8635 |
| (MVAr) | 121.6643 | 121.6698 | 121.6692 | |
| IEEE-118 | (MW) | 132.4813 | 132.4820 | 132.4821 |
| (MVAr) | 782.2786 | 782.2816 | 782.2830 |
| Test System | Power Losses | Matpower Load Flow Analysis | Classical NLPM | New NLPM |
|---|---|---|---|---|
| IEEE-14 | (MW) | 13.3932 | 14.2413 | 13.6221 |
| (MVAr) | 54.5372 | 58.4248 | 55.7560 | |
| IEEE-30 | (MW) | 17.5518 | 16.3230 | 17.1545 |
| (MVAr) | 67.6996 | 63.6821 | 66.331 | |
| IEEE-57 | (MW) | 27.8611 | 27.0641 | 27.8068 |
| (MVAr) | 121.6643 | 118.6022 | 121.4292 | |
| IEEE-118 | (MW) | 132.4813 | 130.8553 | 130.8291 |
| (MVAr) | 782.2786 | 766.1776 | 769.0600 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Florez, H.A.R.; Marujo, D.; López, G.P.; López-Lezama, J.M.; Muñoz-Galeano, N. State Estimation in Electric Power Systems Using an Approach Based on a Weighted Least Squares Non-Linear Programming Modeling. Electronics 2021, 10, 2560. https://doi.org/10.3390/electronics10202560
Florez HAR, Marujo D, López GP, López-Lezama JM, Muñoz-Galeano N. State Estimation in Electric Power Systems Using an Approach Based on a Weighted Least Squares Non-Linear Programming Modeling. Electronics. 2021; 10(20):2560. https://doi.org/10.3390/electronics10202560
Chicago/Turabian StyleFlorez, Hugo A. R., Diogo Marujo, Gloria P. López, Jesús M. López-Lezama, and Nicolás Muñoz-Galeano. 2021. "State Estimation in Electric Power Systems Using an Approach Based on a Weighted Least Squares Non-Linear Programming Modeling" Electronics 10, no. 20: 2560. https://doi.org/10.3390/electronics10202560