

Exploring the Impact of Charging Behavior on Transportation System in the Era of SAEVs: Balancing Current Request with Charging Station Availability



Abstract
:1. Introduction
- Developing a comprehensive multi-agent simulation model that considers both vehicle range and charging behavior of SAEVs to reveal the relationship between SAEVs’ fleet size, charging rate, vehicle range, parking demand, charging demand, VMT, and average response time in the era of SAEVs based on the output of the experiment using real-world datasets in Shenzhen, China;
- Dividing the total VMT into different parts based on the different origins and destinations and analyzing the specific VMT parts that counted most to provide suggestions for reducing these parts;
- Proposing a charging policy that considers the balance between current requests and the availability of charging stations, and reveals its effectiveness on these mentioned metrics.
2. Previous Studies
3. Materials and Methodology
3.1. Data Description
3.1.1. Travel Data
- Filtering to exclude data outside the research area;
- Excluding data with instantaneous changes in Occupancy Status;
- Rasterizing the GPS data and counting the amount of data in each raster;
- Extracting the origin and destination points from the GPS data are taken before 13,380 pieces of OD (Original-Destination) data are shown in Table 2.
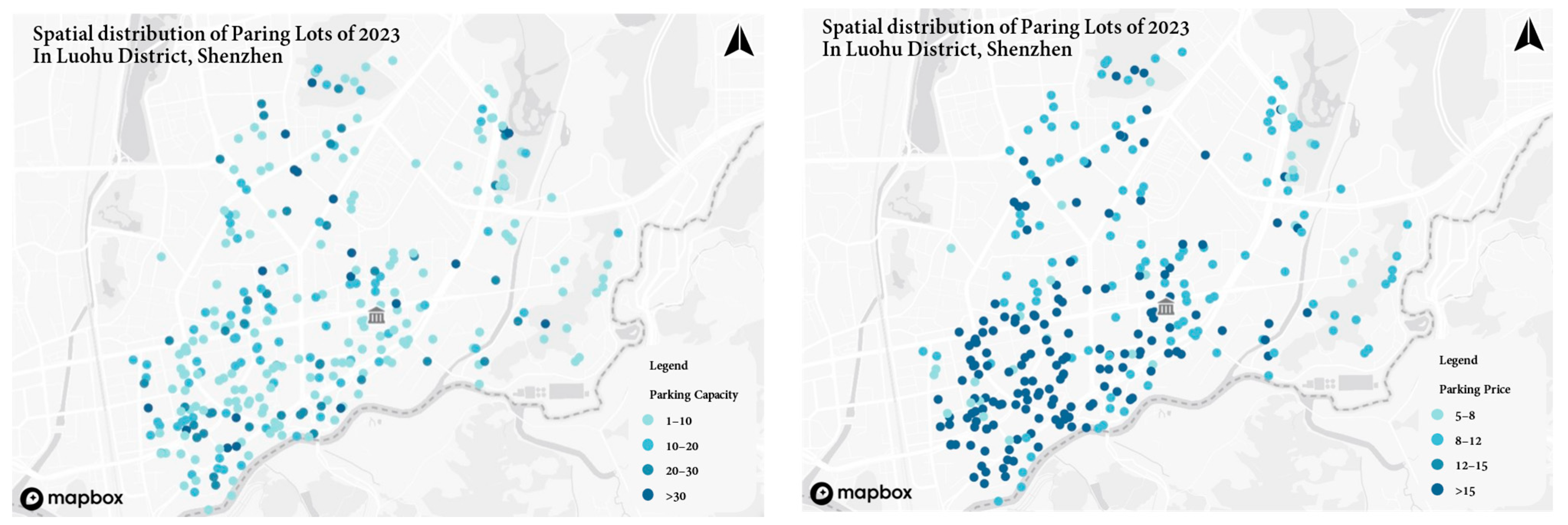
3.1.2. Parking Lots Data
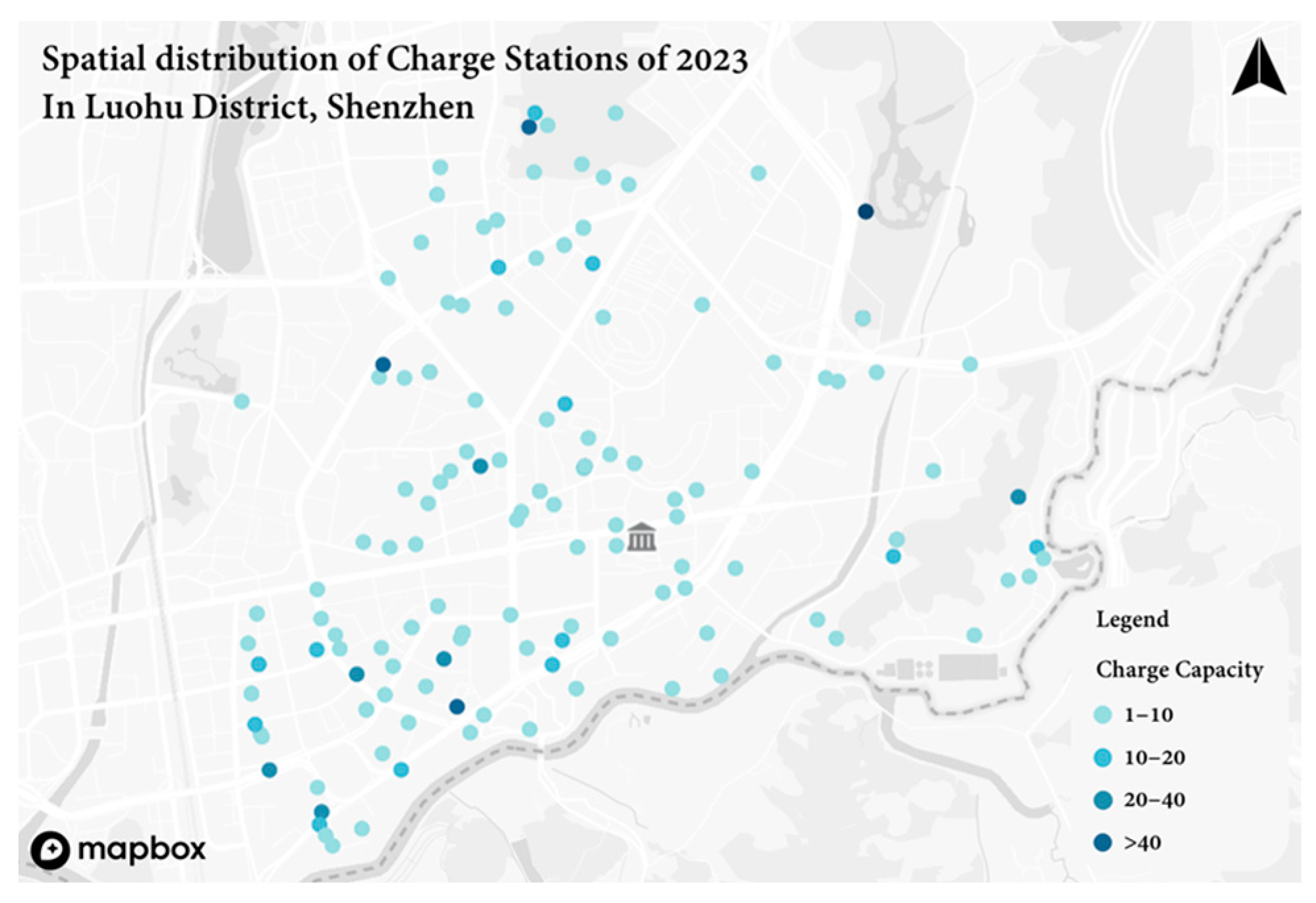
3.1.3. Charging Stations Data
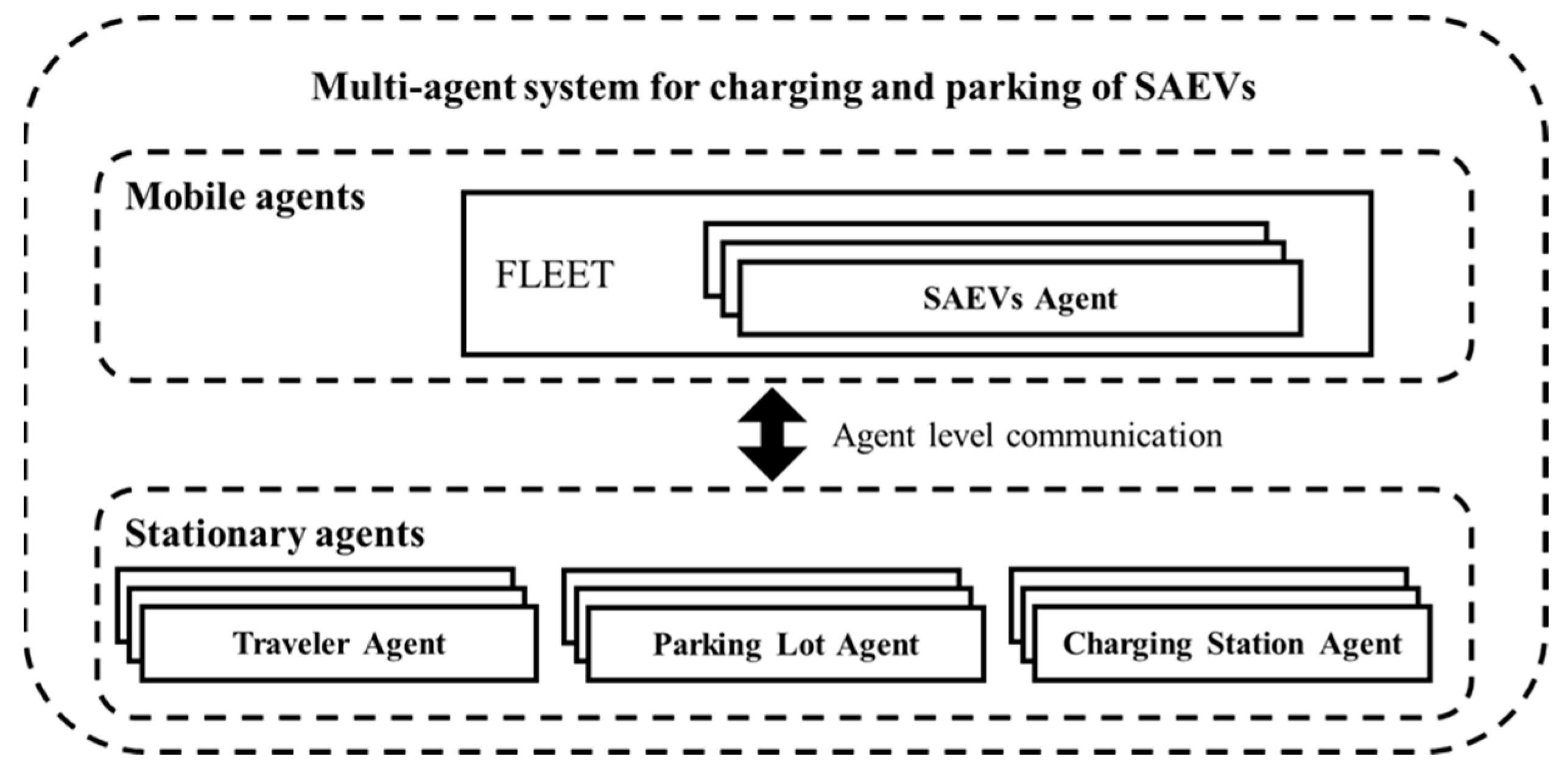
3.2. Multi-Agent-Based Model Specification for SAEVs’ Charging and Parking
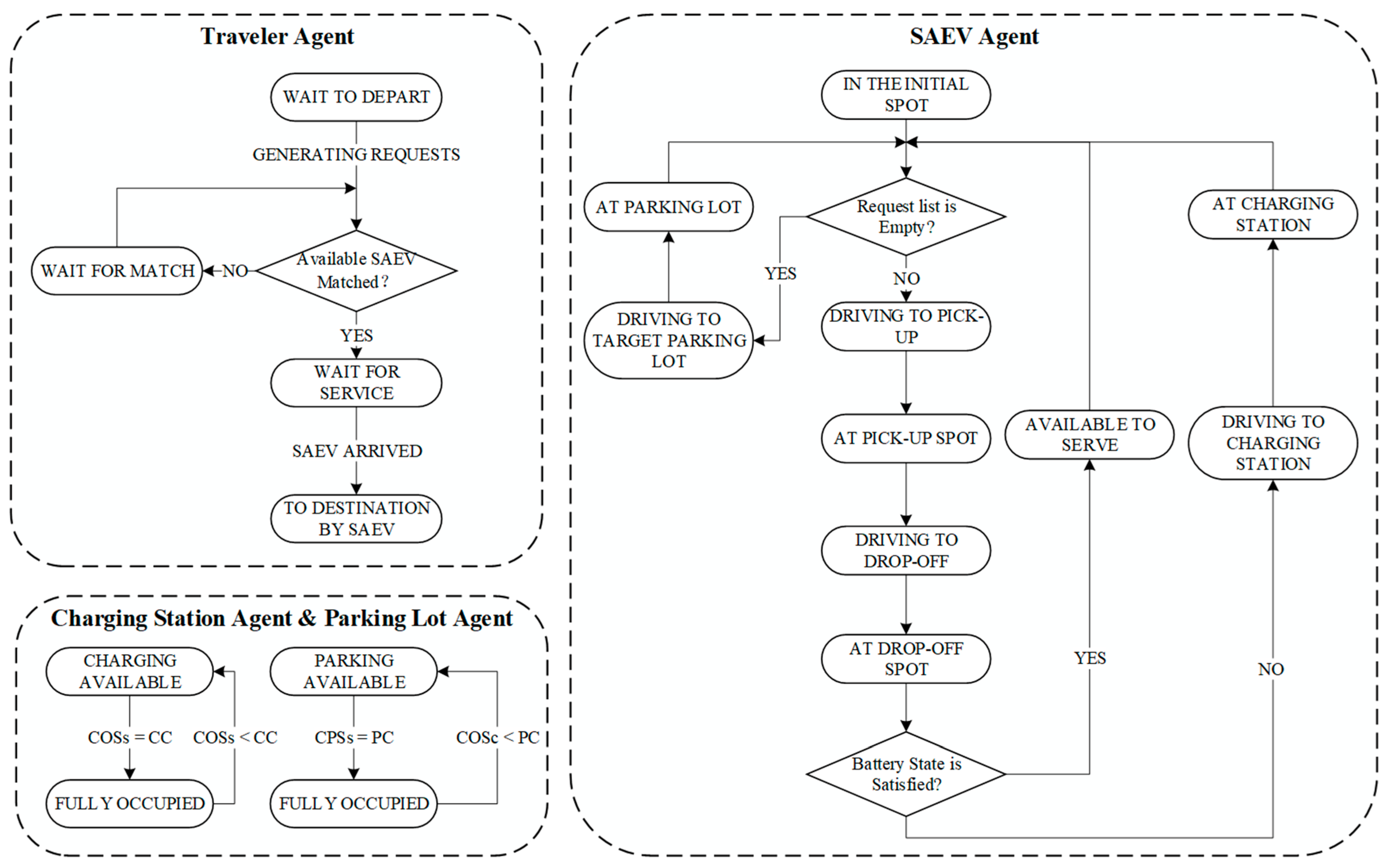
3.2.1. Traveler Agent
3.2.2. SAEV Agent
3.2.3. Charging Station Agent and Parking Lot Agent
3.3. Simulated Scenarios and Experiment Setting
- All SAEVs were fully charged at the beginning of the simulation;
- If the remaining power of a SAEV is not enough to cover the distance to the nearest charging station, it will transfer to the target charging station within 0.01 s as soon as it runs out of power;
- Due to the size of the research area and the fact that even in a scenario with the largest fleet size, there would be only 1338 SAEVs within the network, which is a relatively small number of vehicles, so the effect of road congestion on SAEVs’ speed is not considered throughout the whole process, in other words, the SAEVs maintain a fixed speed throughout the whole simulation.
4. Results and Discussion
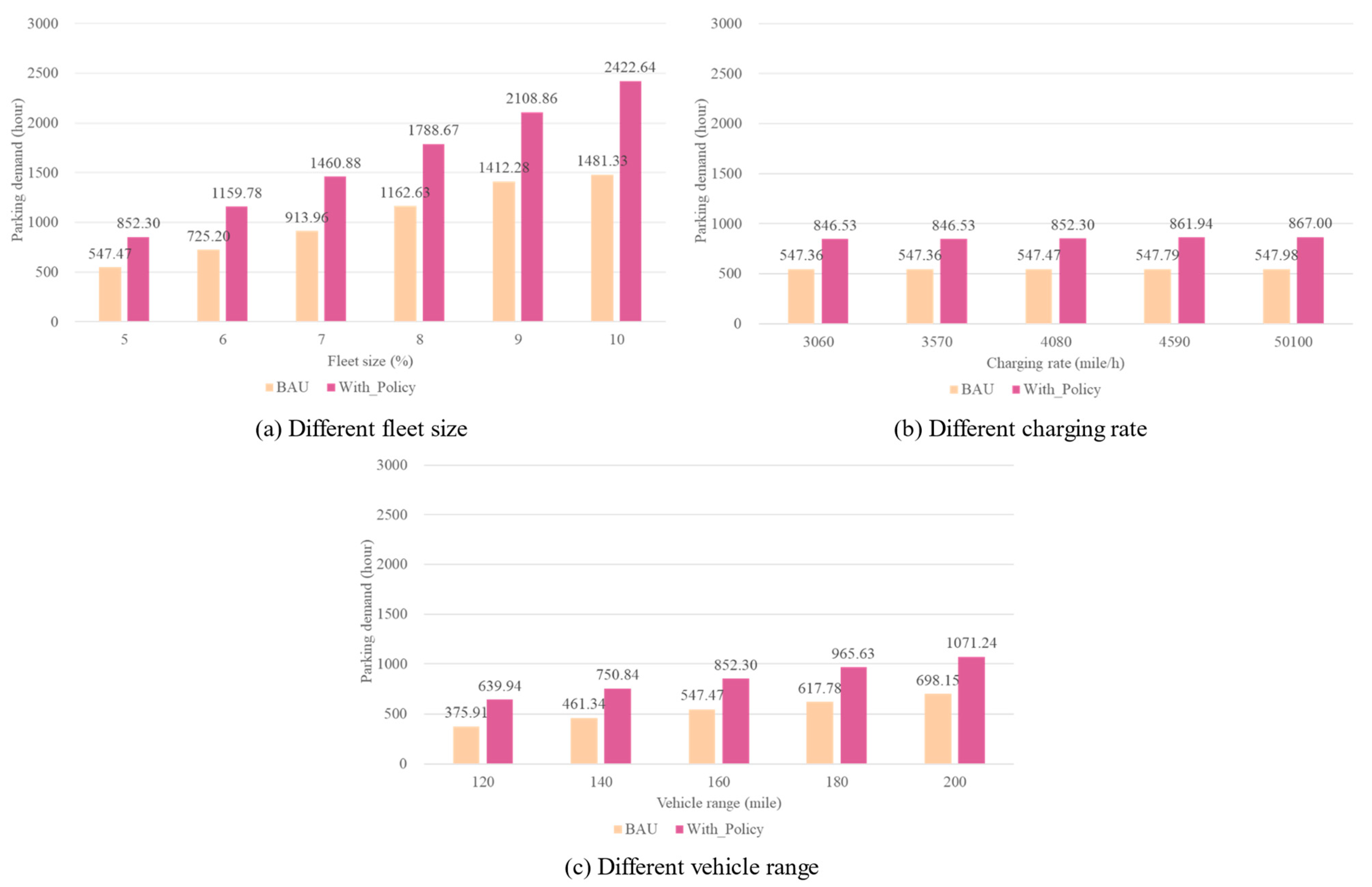
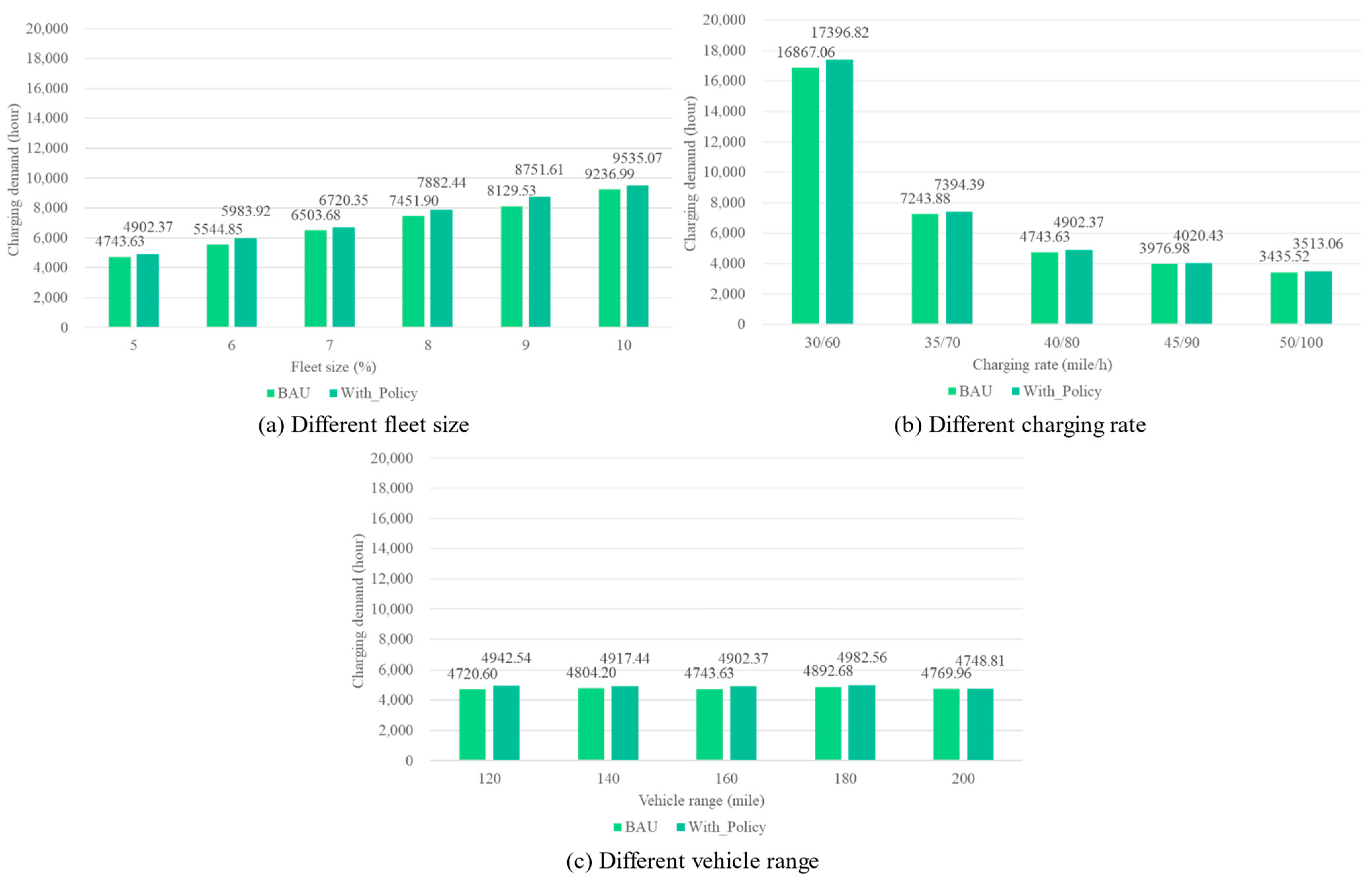
4.1. Parking Demand and Charging Demand
4.2. VMT
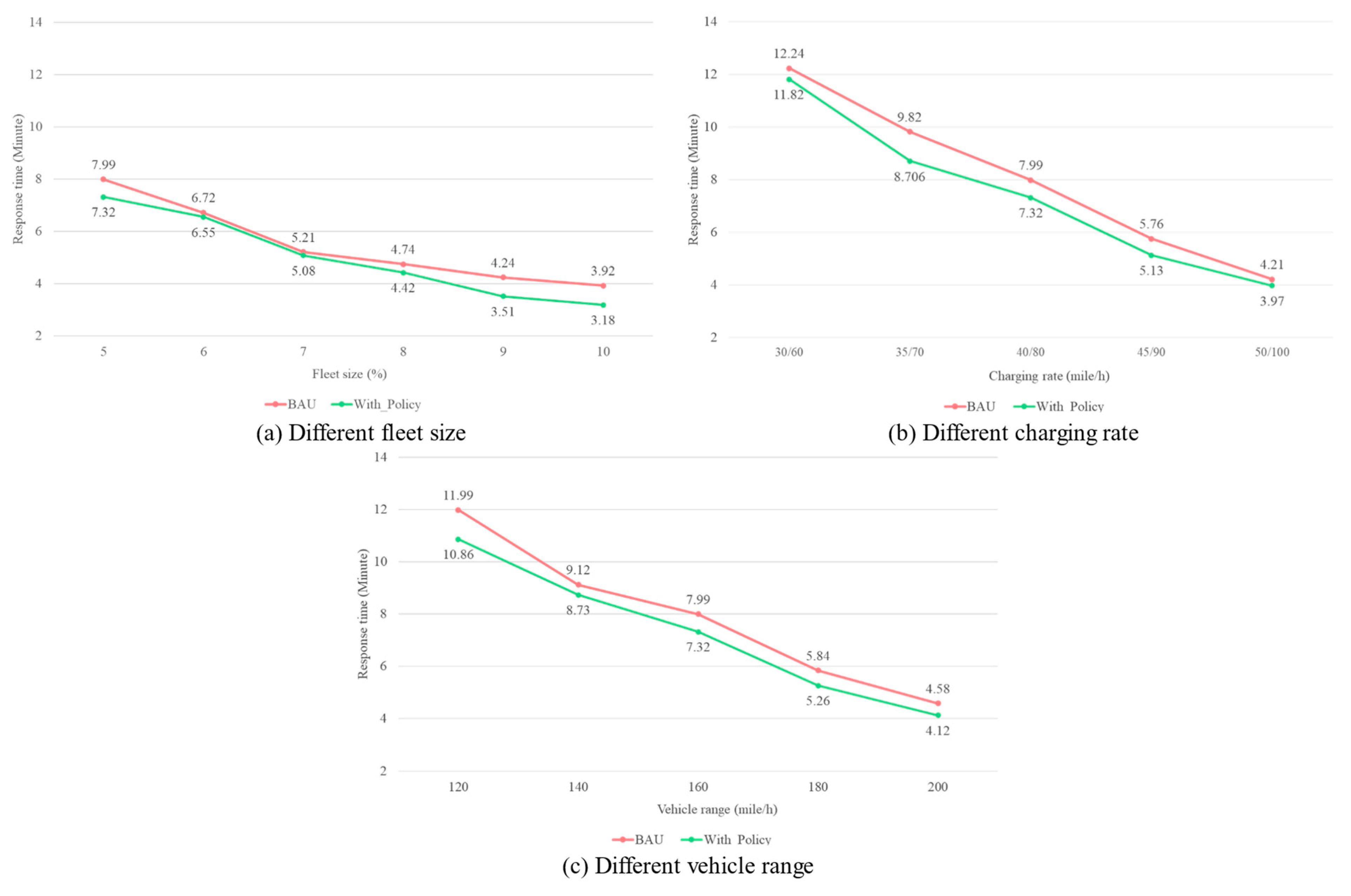
4.3. Average Response Time
5. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Li, L.; Pantelidis, T.; Chow, J.Y.J.; Jabari, S.E. A real-time dispatching strategy for shared automated electric vehicles with performance guarantees. Transp. Res. Part E Logist. Transp. Rev. 2021, 152, 102392. [Google Scholar] [CrossRef]
- Richter, M.A.; Hess, J.; Baur, C.; Stern, R. Exploring the Financial Implications of Operating a Shared Autonomous Electric Vehicle Fleet in Zurich. J. Urban Mobil. 2021, 1, 100001. [Google Scholar] [CrossRef]
- Zhang, W.; Guhathakurta, S.; Fang, J.; Zhang, G. Exploring the impact of shared autonomous vehicles on urban parking demand: An agent-based simulation approach. Sustain. Cities Soc. 2015, 19, 34–45. [Google Scholar] [CrossRef]
- Zhang, W.; Guhathakurta, S. Parking Spaces in the Age of Shared Autonomous Vehicles: How Much Parking Will We Need and Where? Transp. Res. Rec. J. Transp. Res. Board 2017, 2651, 80–91. [Google Scholar] [CrossRef]
- Yan, Q.; Feng, T.; Timmermans, H. Private owners’ propensity to engage in shared parking schemes under uncertainty: Comparison of alternate hybrid expected utility-regret-rejoice choice models. Transp. Lett. 2023, 15, 754–764. [Google Scholar] [CrossRef]
- Chen, T.D.; Kockelman, K.M.; Hanna, J.P. Operations of a shared, autonomous, electric vehicle fleet: Implications of vehicle & charging infrastructure decisions. Transp. Res. Part A Policy Pract. 2016, 94, 243–254. [Google Scholar]
- Loeb, B.; Kockelman, K.M.; Liu, J. Shared autonomous electric vehicle (SAEV) operations across the Austin, Texas network with charging infrastructure decisions. Transp. Res. Part C Emerg. Technol. 2018, 89, 222–233. [Google Scholar] [CrossRef]
- Loeb, B.; Kockelman, K.M. Fleet performance and cost evaluation of a shared autonomous electric vehicle (SAEV) fleet: A case study for Austin, Texas. Transp. Res. Part A Policy Pract. 2019, 121, 374–385. [Google Scholar] [CrossRef]
- Li, Y.; Li, X.; Jenn, A. Evaluating the emission benefits of shared autonomous electric vehicle fleets: A case study in California. Appl. Energy 2022, 323, 119638. [Google Scholar] [CrossRef]
- Gonçalves Duarte Santos, G.; Birolini, S.; de Almeida Correia, G.H. A space–time-energy flow-based integer programming model to design and operate a regional shared automated electric vehicle (SAEV) system and corresponding charging network. Transp. Res. Part C Emerg. Technol. 2023, 147, 103997. [Google Scholar] [CrossRef]
- Zhang, T.Z.; Chen, T.D. Smart charging management for shared autonomous electric vehicle fleets: A Puget Sound case study. Transp. Res. Part D Transp. Environ. 2020, 78, 102184. [Google Scholar] [CrossRef]
- Vosooghi, R.; Puchinger, J.; Bischoff, J.; Jankovic, M.; Vouillon, A. Shared autonomous electric vehicle service performance: Assessing the impact of charging infrastructure. Transp. Res. Part D Transp. Environ. 2020, 81, 102283. [Google Scholar] [CrossRef]
- Liao, Z.; Taiebat, M.; Xu, M. Shared autonomous electric vehicle fleets with vehicle-to-grid capability: Economic viability and environmental co-benefits. Appl. Energy 2021, 302, 117500. [Google Scholar] [CrossRef]
- Nemoto, E.H.; Issaoui, R.; Korbee, D.; Jaroudi, I.; Fournier, G. How to measure the impacts of shared automated electric vehicles on urban mobility. Transp. Res. Part D Transp. Environ. 2021, 93, 102766. [Google Scholar] [CrossRef]
- Dean, M.D.; Gurumurthy, K.M.; de Souza, F.; Auld, J.; Kockelman, K.M. Synergies between repositioning and charging strategies for shared autonomous electric vehicle fleets. Transp. Res. Part D Transp. Environ. 2022, 108, 103314. [Google Scholar] [CrossRef]
- Grahn, R.; Qian, S.; Hendrickson, C. Environmental impacts of first-mile-last-mile systems with shared autonomous electric vehicles and ridehailing. Transp. Res. Part D Transp. Environ. 2023, 118, 103677. [Google Scholar] [CrossRef]
- Fagnant, D.J.; Kockelman, K.M. The travel and environmental implications of shared autonomous vehicles, using agent-based model scenarios. Transp. Res. Part C Emerg. Technol. 2014, 40, 1–13. [Google Scholar] [CrossRef]
- Harper, C.D.; Hendrickson, C.T.; Samaras, C. Exploring the Economic, Environmental, and Travel Implications of Changes in Parking Choices due to Driverless Vehicles: An Agent-Based Simulation Approach. J. Urban Plan. Dev. 2018, 144, 04018043. [Google Scholar] [CrossRef]
- Zhong, H.; Li, W.; Burris, M.W.; Talebpour, A.; Sinha, K.C. Will autonomous vehicles change auto commuters’ value of travel time? Transp. Res. Part D Transp. Environ. 2020, 83, 102303. [Google Scholar] [CrossRef]
- Stinson, M.; Zou, B.; Briones, D.; Manjarrez, A.; Mohammadian, A. Vehicle ownership models for a sharing economy with autonomous vehicle considerations. Transp. Lett. 2023, 15, 1–17. [Google Scholar] [CrossRef]
- Zhang, W.; Wang, K. Parking futures: Shared automated vehicles and parking demand reduction trajectories in Atlanta. Land Use Policy 2020, 91, 103963. [Google Scholar] [CrossRef]
- Millard-Ball, A. The autonomous vehicle parking problem. Transp. Policy 2019, 75, 99–108. [Google Scholar] [CrossRef]
- Kumakoshi, Y.; Hanabusa, H.; Oguchi, T. Impacts of shared autonomous vehicles: Tradeoff between parking demand reduction and congestion increase. Transp. Res. Interdiscip. Perspect. 2021, 12, 100482. [Google Scholar] [CrossRef]
- Liu, Z.; Li, R.; Dai, J. Effects and feasibility of shared mobility with shared autonomous vehicles: An investigation based on data-driven modeling approach. Transp. Res. Part A Policy Pract. 2022, 156, 206–226. [Google Scholar] [CrossRef]
- Winter, K.; Cats, O.; Martens, K.; van Arem, B. Relocating shared automated vehicles under parking constraints: Assessing the impact of different strategies for on-street parking. Transportation 2020, 48, 1931–1965. [Google Scholar] [CrossRef]
- Kim, S.; Lee, U.; Lee, I.; Kang, N. Idle vehicle relocation strategy through deep learning for shared autonomous electric vehicle system optimization. J. Clean. Prod. 2022, 333, 130055. [Google Scholar] [CrossRef]
- Ma, B.; Hu, D.; Wang, Y.; Sun, Q.; He, L.; Chen, X. Time-dependent Vehicle Routing Problem with Departure Time and Speed Optimization for Shared Autonomous Electric Vehicle Service. Appl. Math. Model. 2023, 113, 333–357. [Google Scholar] [CrossRef]
- García-Magariño, I.; Palacios-Navarro, G.; Lacuesta, R.; Lloret, J. ABSCEV: An agent-based simulation framework about smart transportation for reducing waiting times in charging electric vehicles. Comput. Netw. 2018, 138, 119–135. [Google Scholar] [CrossRef]
- Müller, J.; Straub, M.; Naqvi, A.; Richter, G.; Peer, S.; Rudloff, C. MATSim Model Vienna: Analyzing the Socioeconomic Impacts for Different Fleet Sizes and Pricing Schemes of Shared Autonomous Electric Vehicles. In Proceedings of the Transportation Research Board 100th Annual Meeting 2021, Washington, DC, USA, 5–29 January 2021. [Google Scholar]
- De Wolf, D.; Diop, N.; Kilani, M. Environmental impacts of enlarging the market share of electric vehicles. Environ. Econ. Policy Stud. 2022. [Google Scholar] [CrossRef]
- Song, Y.; Zhao, H.; Luo, R.; Huang, L.; Zhang, Y.; Su, R. A sumo framework for deep reinforcement learning experiments solving electric vehicle charging dispatching problem. arXiv 2022, arXiv:2209.02921. [Google Scholar]
- Zhang, H.; Sheppard, C.J.R.; Lipman, T.E.; Zeng, T.; Moura, S.J. Charging infrastructure demands of shared-use autonomous electric vehicles in urban areas. Transp. Res. Part D Transp. Environ. 2020, 78, 102210. [Google Scholar] [CrossRef]
- Gardner, L.M.; Duell, M.; Waller, S.T. A framework for evaluating the role of electric vehicles in transportation network infrastructure under travel demand variability. Transp. Res. Part A Policy Pract. 2013, 49, 76–90. [Google Scholar] [CrossRef]
- Cui, S.; Yao, B.; Chen, G.; Zhu, C.; Yu, B. The multi-mode mobile charging service based on electric vehicle spatiotemporal distribution. Energy 2020, 198, 117302. [Google Scholar] [CrossRef]
- Cui, S.; Ma, X.; Zhang, M.; Yu, B.; Yao, B. The parallel mobile charging service for free-floating shared electric vehicle clusters. Transp. Res. Part E Logist. Transp. Rev. 2022, 160, 102652. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Taxi ID | Time | Longitude | Latitude | Occupancy Status | Speed |
|---|---|---|---|---|---|
| 34745 | 20:27:43 | 113.8068 | 22.62325 | 1 | 27 |
| 34745 | 20:24:07 | 113.8099 | 22.6274 | 0 | 0 |
| … | … | … | … | … | … |
| 28265 | 21:35:13 | 114.3215 | 22.7095 | 0 | 18 |
| 28265 | 9:08:02 | 114.3227 | 22.6817 | 0 | 0 |
| Trip ID | Start Time | Start LON. | Star LAT. | End Time | End LON. | End LAT. |
|---|---|---|---|---|---|---|
| 0 | 0:19:41 | 114.013016 | 22.664818 | 0:23:01 | 114.0214 | 22.663918 |
| 1 | 0:41:51 | 114.021767 | 22.6402 | 0:43:44 | 114.02607 | 22.640266 |
| … | … | … | … | … | … | … |
| 13378 | 23:03:45 | 114.118484 | 22.547867 | 23:20:09 | 114.133286 | 22.61775 |
| 13379 | 23:36:19 | 114.112968 | 22.549601 | 23:43:12 | 114.089485 | 22.538918 |
| ID | Price (RMB) * | Longitude | Latitude | Capacity |
|---|---|---|---|---|
| 1 | 5 | 114.1408886 | 22.5565399 | 8 |
| 2 | 5 | 114.1378183 | 22.5588927 | 6 |
| … | … | … | … | … |
| 307 | 5 | 114.112597 | 22.5791201 | 25 |
| 308 | 15 | 114.1068256 | 22.5834787 | 20 |
| ID | Property | Longitude | Latitude | Capacity |
|---|---|---|---|---|
| 1 | public | 114.117447 | 22.545063 | 2 |
| 2 | public | 114.118273 | 22.543836 | 2 |
| … | … | … | … | … |
| 266 | public | 114.181697 | 22.559031 | 10 |
| 267 | public | 114.183742 | 22.612863 | 4 |
| Agent | State | Description |
|---|---|---|
| Traveler | WAIT TO DEPART | Initial state of a Traveler agent waits for departure. |
| WAIT FOR SERVICE | The Traveler’s request has been successfully assigned to a SAEV and it is waiting for the arrival of this specific SAEV. | |
| WAIT FOR MATCH | The Traveler’s request cannot be assigned to a SAEV and it has to be waited until there is an available one. | |
| TO DESTINATION BY SAEV | The Traveler is now taken to its destination by a SAEV. | |
| SAEV | IN THE INITIAL SPOT | Initial state of an SAEV agent where it waits for requests. |
| DRIVING TO PICK-UP | The state that the SAEV is driving to the pick-up point of the matched request. | |
| AT PICK-UP POINT | The state that the SAEV has arrived at the pick-up point of the matched request. | |
| DRIVING TO DROP-OFF | The state that the SAEV is driving to the drop-off point of the matched request. | |
| AT DROP-OFF POINT | The state that the SAEV has arrived at the drop-off point of the matched request and checking the battery status. | |
| AVAILABLE TO SERVE | The state indicates that battery level is sufficient for the upcoming request. | |
| DRIVING TO TARGET PARKING LOT | The state indicates that the SAEV is driving to the target parking lot. | |
| AT PARKING LOT | The state indicates that the SAEV has arrived at its target parking lot. | |
| DRIVING TO CHARGE STATION | The state indicates that the SAEV is driving to a charging station. | |
| AT CHARGE STATION | The state indicates that the SAEV has arrived at the charging station. | |
| Parking Lot | PARKING AVAILABLE | The state indicates that there is an available parking space in the parking lot. |
| FULLY OCCUPIED | The state indicates that there is no available parking space in the parking lot. | |
| Charging Station | CHARGING AVAILABLE | The state indicates that there is an available charging space in the charging station. |
| FULLY OCCUPIED | The state indicates that there is no available charging space in the charging station. |
| Vehicle Range (mile) | 120 | 140 | 160 | 180 | 200 | NA |
| Charging rate (GC/FC) (mile/h) | 30/60 | 35/70 | 40/80 | 45/90 | 50/100 | NA |
| Fleet size (%) | 5 | 6 | 7 | 8 | 9 | 10 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, Y.; Ye, X.; Yan, X.; Wang, T.; Chen, J.; Zheng, P. Exploring the Impact of Charging Behavior on Transportation System in the Era of SAEVs: Balancing Current Request with Charging Station Availability. Systems 2024, 12, 61. https://doi.org/10.3390/systems12020061
Zhu Y, Ye X, Yan X, Wang T, Chen J, Zheng P. Exploring the Impact of Charging Behavior on Transportation System in the Era of SAEVs: Balancing Current Request with Charging Station Availability. Systems. 2024; 12(2):61. https://doi.org/10.3390/systems12020061
Chicago/Turabian StyleZhu, Yi, Xiaofei Ye, Xingchen Yan, Tao Wang, Jun Chen, and Pengjun Zheng. 2024. "Exploring the Impact of Charging Behavior on Transportation System in the Era of SAEVs: Balancing Current Request with Charging Station Availability" Systems 12, no. 2: 61. https://doi.org/10.3390/systems12020061