
Relationship between Friction Coefficient and Surface Roughness of Stone and Ceramic Floors


Abstract
:1. Introduction
2. Method
2.1. Friction Measurement Device
2.2. Floor Tiles
2.3. Surface Conditions
2.4. Measurement Procedure
2.5. Statistical Analysis
3. Results
3.1. ANOVA Results
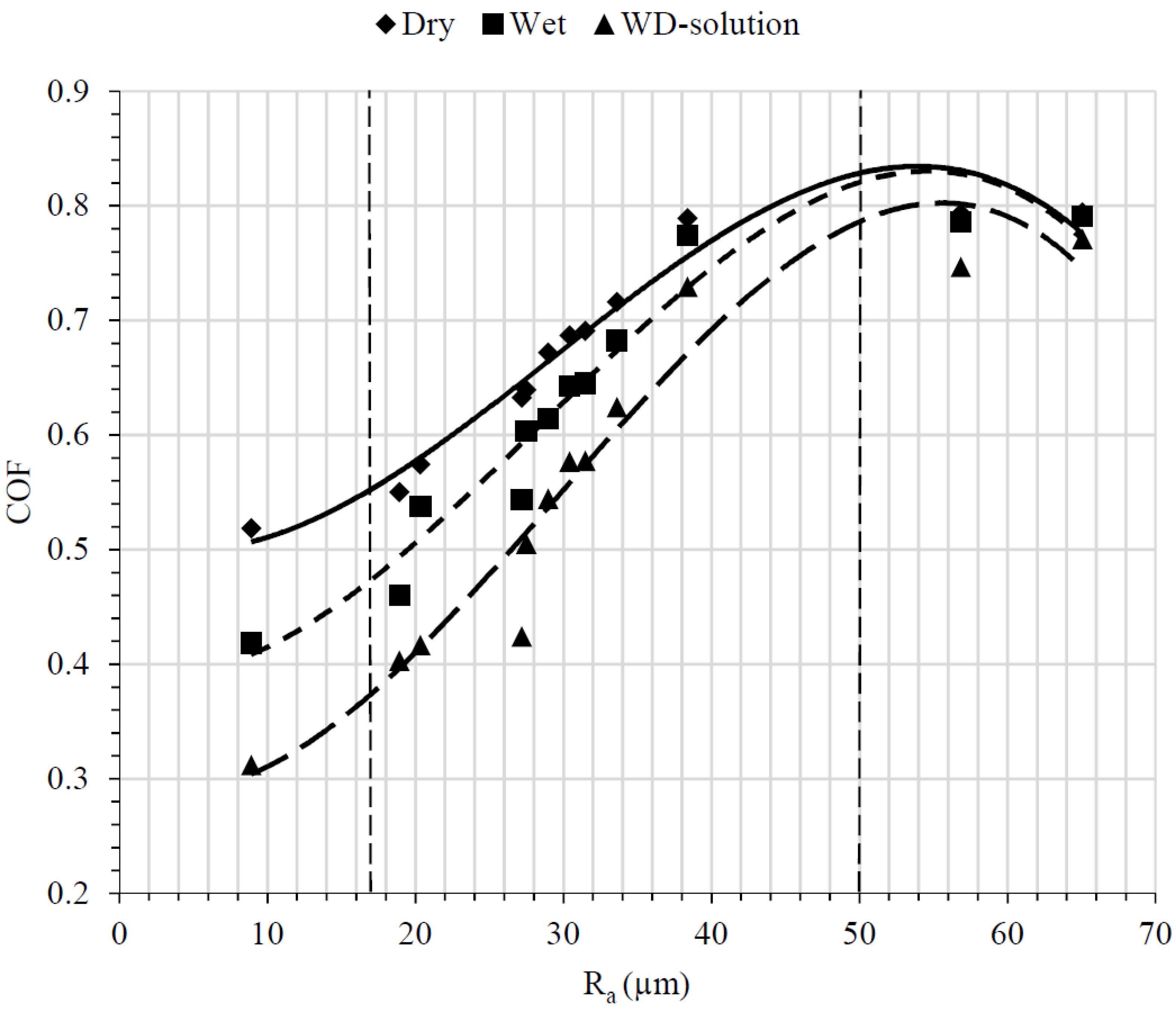
3.2. Correlation Analyses & Regression Modeling
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chang, W.-R.; Leclercq, S.; Lockhart, T.; Haslam, R. State of science: Occupational slips, trips and falls on the same level. Ergonomics 2016, 59, 1–23. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Goerlandt, F.; Li, K.W. Slip and fall incidents at work: A visual analytics analysis of the research domain. Int. J. Environ. Res. Public Health 2019, 16, 4972. [Google Scholar] [CrossRef] [Green Version]
- Ministry of Labor (MOL). Labor Inspection Annual Report, Taipei, Taiwan. 2019. Available online: http://www.osha.gov.tw/1106/1164/1165/1168/29804 (accessed on 17 February 2021). (In Chinese)
- Ministry of Manpower (MOM). Workplace Safety and Health Report 2019: National Statistics. Singapore. 2020. Available online: http://mom.gov.sg (accessed on 17 January 2021).
- Labour Department. Occupational Safety and Health Statistics, The Government of Hong Kong Special Administrative Region. 2019. Available online: https://www.labour.gov.hk/eng/osh/pdf/archive/statistics/OSH_Statistics_2018_eng.pdf (accessed on 22 January 2021).
- U.S. Department of Labor, Bureau of Labor Statistics (BLS). Employer-Reported Workplace Injures and Illnesses—2017; BLS: Washington, DC, USA, 2018.
- Health and Safety Executive (HSE). Health and Safety at Work Summary Statistics for Great Britain 2020. Available online: https://www.hse.gov.uk/statistics/overall/hssh1920.pdf (accessed on 10 March 2021).
- Courtney, T.K.; Sorock, G.S.; Manning, D.P.; Collins, J.W.; Holbein-Jenny, M.A. Occupational slip, trip, and fall-related injuries can the contribution of slipperiness be isolated? Ergonomics 2001, 44, 1118–1137. [Google Scholar] [CrossRef] [PubMed]
- Chang, W.R.; Grönqvist, R.; Leclercq, S.; Brungraber, R.J.; Mattke, U.; Strandberg, L.; Thorpe, S.C.; Myung, R.; Makkonen, L.; Courtney, T.K. The role of friction in the measurement of slipperiness, Part 2: Survey of friction measurement devices. Ergonomics 2001, 44, 1233–1261. [Google Scholar] [CrossRef]
- Hanson, J.P.; Redfern, M.S.; Mazumdar, M. Predicting slips and falls considering required and available friction. Ergonomics 1999, 42, 1619–1633. [Google Scholar] [CrossRef] [PubMed]
- Grönqvist, R.; Chang, W.-R.; Courtney, T.K.; Leamon, T.B.; Redfern, M.S.; Strandberg, L. Measurement of slipperiness: Fundamental concepts and definitions. Ergonomics 2001, 44, 1102–1117. [Google Scholar] [CrossRef]
- Beschorner, K.E.; Albert, D.L.; Redfern, M.S. Required coefficient of friction during level walking is predictive of slipping. Gait Posture 2016, 48, 256–260. [Google Scholar] [CrossRef] [PubMed]
- Beschorner, K.E.; Iraqi, A.; Redfern, M.S.; Moyer, B.E.; Cham, R. Influence of averaging time-interval on shoe-floor-contaminant available coefficient of friction measurements. Appl. Ergon. 2020, 82, 102959. [Google Scholar] [CrossRef]
- Beschorner, K.E.; Iraqi, A.; Redfern, M.S.; Cham, R.; Li, Y. Predicting slips based on the STM 603 whole-footwear tribometer under different coefficient of friction testing conditions. Ergonomics 2019, 62, 668–681. [Google Scholar] [CrossRef]
- Li, K.W.; Zhao, C.; Peng, L.; Liu, A.-Q. Subjective assessments of floor slipperiness before and after walk under two lighting conditions. Int. J. Occup. Saf. Ergon. 2017, 24, 294–302. [Google Scholar] [CrossRef] [PubMed]
- Redfern, M.S.; Cham, R.; Gielo-Perczak, K.; Grönqvist, R.; Hirvonen, M.; Lanshammar, H.; Marpet, M.; Pai, C.Y.C., IV; Powers, C. Biomechanics of slips. Ergonomics 2001, 44, 1138–1166. [Google Scholar] [CrossRef]
- Chang, W.-R.; Cotnam, J.P.; Matz, S. Field evaluation of two commonly used slipmeters. Appl. Ergon. 2002, 34, 51–60. [Google Scholar] [CrossRef]
- Li, K.W.; Chen, C.J. The effect of shoe soling tread groove width on the coefficient of friction with different sole materials, floors, and contaminants. Appl. Ergon. 2004, 35, 499–507. [Google Scholar] [CrossRef] [PubMed]
- Yu, R.; Li, K.W. A field assessment of floor slipperiness in a student cafeteria. Int. J. Inj. Control. Saf. Promot. 2012, 20, 245–253. [Google Scholar] [CrossRef] [PubMed]
- Merryweather, A.S.; Thiese, M.S.; Kapellusch, J.M.; Garg, A.; Fix, D.J.; Hegmann, K.T. Occupational factors related to slips, trips and falls among home healthcare workers. Saf. Sci. 2018, 107, 155–160. [Google Scholar] [CrossRef]
- Coşkun, G.; Sarıışık, G. Analysis of slip safety risk by portable floor slipperiness tester in state institutions. J. Build. Eng. 2020, 27, 100953. [Google Scholar] [CrossRef]
- Johnson, K.P. Assessing Floor Slipperiness in Campus Dining Halls Using Objective and Subjective Measures. Master’s Thesis, East Carolina University, Greenville, NC, USA, December 2017. Available online: http://hdl.handle.net/10342/6544. (accessed on 10 March 2021).
- Grönqvist, R. Mechanisms of friction and assessment of slip resistance of new and used footwear soles on contaminated floors. Ergonomics 1995, 38, 224–241. [Google Scholar] [CrossRef] [PubMed]
- Li, K.W.; Chang, W.R.; Wei, J.C.; Kou, C.H. Friction measurements on ramps using the Brungraber Mark II slip meter. Saf. Sci. 2006, 44, 375–386. [Google Scholar] [CrossRef]
- Derler, S.; Kausch, F.; Huber, R. Analysis of factors influencing the friction coefficients of shoe sole materials. Saf. Sci. 2007, 46, 822–832. [Google Scholar] [CrossRef]
- Kim, I.-J.; Hsiao, H.; Simeonov, P. Functional levels of floor surface roughness for the prevention of slips and falls: Clean-and-dry and soapsuds-covered wet surfaces. Appl. Ergon. 2013, 44, 58–64. [Google Scholar] [CrossRef]
- Kim, I.-J. Wear observation of shoe surfaces: Application for slip and fall safety assessments. Tribol. Trans. 2015, 58, 407–417. [Google Scholar] [CrossRef]
- Kim, I.-J. A study on wear development of floor surfaces: Impact on pedestrian walkway slip-resistance performance. Tribol. Int. 2016, 95, 316–323. [Google Scholar] [CrossRef]
- Çoşkun, G.; Sarıışık, G.; Sarıışık, A. Classification of parameters affecting slip safety of limestones. Cogent Eng. 2016, 3, 1217821. [Google Scholar] [CrossRef]
- Jones, T.; Iraqi, A.; Beschorner, K. Performance testing of work shoes labeled as slip resistant. Appl. Ergon. 2018, 68, 304–312. [Google Scholar] [CrossRef]
- Iraqi, A.; Vidic, N.S.; Redfern, M.S.; Beschorner, K.E. Prediction of coefficient of friction based on footwear outsole features. Appl. Ergon. 2019, 82, 102963. [Google Scholar] [CrossRef]
- Fekr, A.R.; Li, Y.; Gauvin, C.; Wong, G.; Cheng, W.; Fernie, G.; Dutta, T. Evaluation of winter footwear: Comparison of test methods to determine footwear slip resistance on ice surfaces. Int. J. Environ. Res. Public Health 2021, 18, 405. [Google Scholar] [CrossRef] [PubMed]
- Sarıışık, A.; Akdaş, H.; Sarıışık, G.; Çoşkun, G. Slip safety analysis of differently surface processed dimension marbles. J. Test. Eval. 2011, 39, 908–917. [Google Scholar] [CrossRef]
- Iraqi, A.; Cham, R.; Redfern, M.S.; Beschorner, K.E. Coefficient of friction testing parameters influence the prediction of human slips. Appl. Ergon. 2018, 70, 118–126. [Google Scholar] [CrossRef] [PubMed]
- DeMarch, A.; Angioletto, E.; Vieira, A.W.; Molin, A.D.; Montedo, O.R.K.; Angioletto, E. Coefficients of static and dynamic friction of ceramic floor tiles: Proposal of new method of surface roughness determination. Int. J. Metrol. Qual. Eng. 2019, 10, 4. [Google Scholar] [CrossRef]
- Chen, C.-C.; Chen, Z.-X.; Chang, C.-L.; Lin, F.-L. The slip-resistance effect evaluation of floor roughness under different liquid viscosity. Procedia Manuf. 2015, 3, 5007–5013. [Google Scholar] [CrossRef] [Green Version]
- Chang, W.-R. The effect of surface roughness on the measurement of slip resistance. Int. J. Ind. Ergon. 1999, 24, 299–313. [Google Scholar] [CrossRef]
- Li, K.W.; Yu, R.; Zhang, W. Roughness and slipperiness of floor surface: Tactile sensation and perception. Saf. Sci. 2011, 49, 508–512. [Google Scholar] [CrossRef]
- Grönqvist, R.; Roine, J.; Korhonen, E.; Rahikainen, A. Slip resistance versus surface roughness of deck and other underfoot surfaces in ships. J. Occup. Accid. 1990, 13, 291–302. [Google Scholar] [CrossRef]
- ASTM F609-05. Standard Test Method for Using a Horizontal Pull Slipmeter (HPS); ASTM International: West Conshohocken, PA, USA, 2013; Available online: http://www.astm.org (accessed on 10 March 2021).
- Li, R.; Li, X.; Li, Y.; Yang, P.; Liu, J. Experimental and numerical study on surface roughness of magnetorheological elastomer for controllable friction. Friction 2020, 8, 917–929. [Google Scholar] [CrossRef] [Green Version]
- Mitutoyo, Portable Surface Roughness Tester SURFTEST SJ301 Series User Menu. Available online: https://www2.mitutoyo.co.jp/eng/support/service/catalog/03/E15013.pdf (accessed on 10 March 2021).
- Brown, C.A.; Hansen, H.N.; Jiang, X.J.; Blateyron, F.; Berglund, J.; Senin, N.; Bartkowiak, T.; Dixon, B.; Le Goic, G.; Quinsat, Y.; et al. Multiscale analyses and characterizations of surface topographies. CIRP Ann. Manuf. Technol. 2018, 67, 839–862. [Google Scholar] [CrossRef]
- Montgomery, D.C. Design and Analysis of Experiment, 2nd ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 1984; p. 70. [Google Scholar]
- Chang, W.R.; Maynard, W.S. Factors influencing the slip index measurements with the horizontal pull slipmeter. Work 2006, 26, 99–105. [Google Scholar]
- Khaday, S.; Li, K.W. Friction measurement on common floor using a horizontal pull slip meter. Int. J. Environ. Sci. Dev. 2019, 10, 275–279. [Google Scholar] [CrossRef]
- AS/NZS 4663. Australian Standards: Slip Resistance Measurement of Existing Pedestrian Surfaces. 2004. Available online: https://www.saiglobal.com/pdftemp/previews/osh/as/as4000/4600/4663-2004.pdf. (accessed on 10 March 2021).
- Health and Safety Executive (HSE). Assessing the Slip Resistance of Flooring. 2012. Available online: http://www.hse.gov.uk/pubns/geis2.htm (accessed on 17 February 2021).
- American National Standards Institute (ANSI). Provision of Slip Resistance on Walking/Working Surfaces; ANSI/ASSE A1264.2; American Society of Safety Engineers: Des Plaines, IL, USA, 2012. [Google Scholar]
- Occupational Safety and Health Administration (OSHA). Static Coefficients of Friction for Walking/Working Surfaces. 2019. Available online: http://www.osha.gov/pls/oshaweb/owadisp.show_document?p_table=FEDERAL_REGISTER&p_id=17819 (accessed on 10 March 2021).
- Daukus, S. Understanding Floor Slip Resistance Standards. 2018. Available online: http://www.florock.net/2018/06/floor-slip-resistance-standards (accessed on 18 February 2021).
- Ahmad, N.A.; Tap, M.M.; Syahrom, A.; Rohani, J.M. The Relationship Between Coefficient of Friction (COF) with Floor Slipperiness and Roughness. In Quantitative and Qualitative Factors that Leads to Slip and Fall Incidents. Springer Briefs in Applied Sciences and Technology; Springer: Berlin/Heidelberg, Germany, 2016; pp. 21–31. [Google Scholar] [CrossRef]
- Berglund, J.; Brown, C.; Rosén, B.-G.; Bay, N.O. Milled die steel surface roughness correlation with steel sheet friction. CIRP Ann. 2010, 59, 577–580. [Google Scholar] [CrossRef]
- Wiklund, D.; Liljebgren, M.; Berglund, J.; Bay, N.; Kjellsson, K.; Rosén, B.G. Friction in sheet metal forming: A Comparison between milled and manually polished surfaces. In Proceedings of the 4th International Conference on Tribology in Manufacturing Processes, Nice, France, 13–15 June 2010; pp. 613–622. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
| Code | Stone Floor | Ra (μm) | Code | Ceramic Tile | Ra (μm) |
|---|---|---|---|---|---|
| S1 |  | 31.5 | C1 |  | 8.9 |
| S2 |  | 29.0 | C2 |  | 18.9 |
| S3 |  | 56.8 | C3 |  | 20.3 |
| S4 |  | 38.4 | C4 |  | 27.2 |
| S5 |  | 33.6 | C5 |  | 27.5 |
| S6 |  | 65.1 | C6 |  | 30.4 |
| Floor | Ra (μm) | Wet Mean COF | Grouping * | WD Solution Mean COF | Grouping * |
|---|---|---|---|---|---|
| S2 | 29.0 | 0.78 | A | 0.77 | A |
| S1 | 31.5 | 0.77 | AB | 0.76 | A |
| S6 | 65.1 | 0.74 | B | 0.70 | B |
| S5 | 33.6 | 0.68 | C | 0.63 | C |
| S3 | 56.8 | 0.63 | D | 0.58 | D |
| S4 | 38.4 | 0.63 | D | 0.57 | D |
| C3 | 20.3 | 0.62 | D | 0.55 | D |
| C6 | 30.4 | 0.60 | D | 0.49 | E |
| C4 | 27.2 | 0.52 | E | 0.45 | F |
| C5 | 27.5 | 0.52 | E | 0.41 | G |
| C2 | 18.9 | 0.47 | F | 0.40 | G |
| C1 | 8.9 | 0.42 | G | 0.30 | H |
| Surface | ß0 | ß1 | ß2 | ß3 | R2 | √MSE |
|---|---|---|---|---|---|---|
| dry | 0.508 | −4.1 × 10−3 | 5 × 10−4 | −6 × 10−6 | 0.96 | 0.022 |
| wet | 0.393 | −2.5 × 10−3 | 5 × 10−4 | −6 × 10−6 | 0.94 | 0.033 |
| WD solution | 0.297 | −4.4 × 10−3 | 6 × 10−4 | −7 × 10−6 | 0.93 | 0.044 |
| Study | Friction Measurement Device | Surface Covered by | Safety Criterion | Ra (μm) |
|---|---|---|---|---|
| Gronqvist et al. (1990) | dynamic step simulator | glycerol | DCOF = 0.2 | 7–9 |
| glycerol | DCOF = 0.3 | 16–22 | ||
| Kim et al. (2013) | pendulum-type hydraulic dynamic friction tester | soapsuds | DCOF = 0.4 | 17 |
| Chen et al. (2015) | Brungraber Mark II | water, soda | SCOF = 0.5 | 28 |
| Liquids: 2 mPa·s < Viscosity < 38 mPa·s | SCOF = 0.5 | 40 | ||
| Current study | HPS | Water | SCOF = 0.5 | 19 |
| WD solution | SCOF = 0.5 | 27 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khaday, S.; Li, K.-W.; Peng, L.; Chen, C.-C. Relationship between Friction Coefficient and Surface Roughness of Stone and Ceramic Floors. Coatings 2021, 11, 1254. https://doi.org/10.3390/coatings11101254
Khaday S, Li K-W, Peng L, Chen C-C. Relationship between Friction Coefficient and Surface Roughness of Stone and Ceramic Floors. Coatings. 2021; 11(10):1254. https://doi.org/10.3390/coatings11101254
Chicago/Turabian StyleKhaday, Samsiya, Kai-Way Li, Lu Peng, and Ching-Chung Chen. 2021. "Relationship between Friction Coefficient and Surface Roughness of Stone and Ceramic Floors" Coatings 11, no. 10: 1254. https://doi.org/10.3390/coatings11101254