The Applications of Metaheuristics for Human Activity Recognition and Fall Detection Using Wearable Sensors: A Comprehensive Analysis

 , ,
, , 
Abstract
:1. Introduction
1.1. Motivation
1.2. Paper—Main Contributions
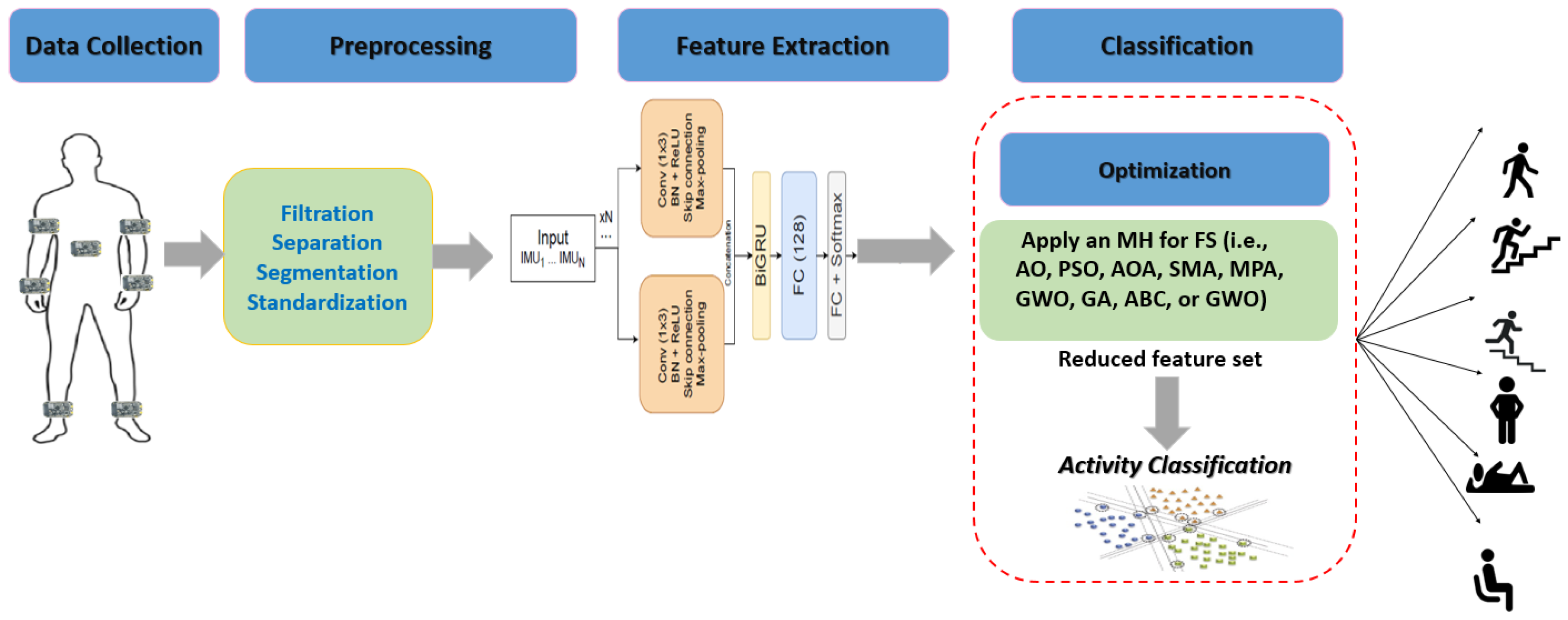
- We studied the impacts of metaheuristic (MH) optimization algorithms on human activity recognition (HAR) and fall detection using body-attached sensor data. We tested nine MH algorithms and compared their performances.
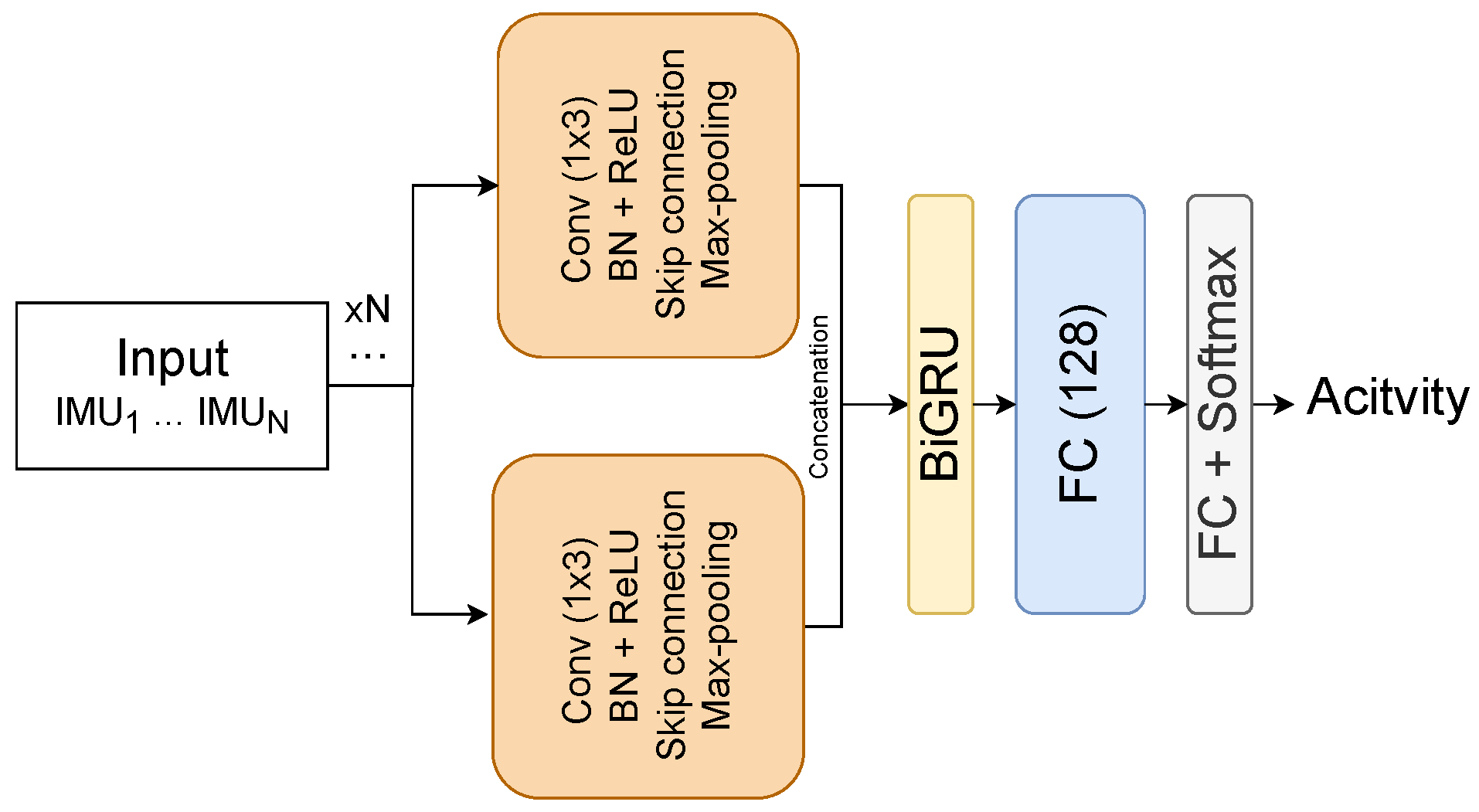
- We developed a light feature extraction approach called ResRNN using several deep learning models, such as convolution neural networks (CNN), residual networks, and bidirectional recurrent neural network (BiRNN), to expose the related features from the collected signal data.
- We examined the suggested feature selection methods based on MH algorithms using different and complex datasets that covered all the aspects of sensor data for HAR and fall-detection applications.
1.3. Paper—Organization
2. Related Work
3. Materials and Methods
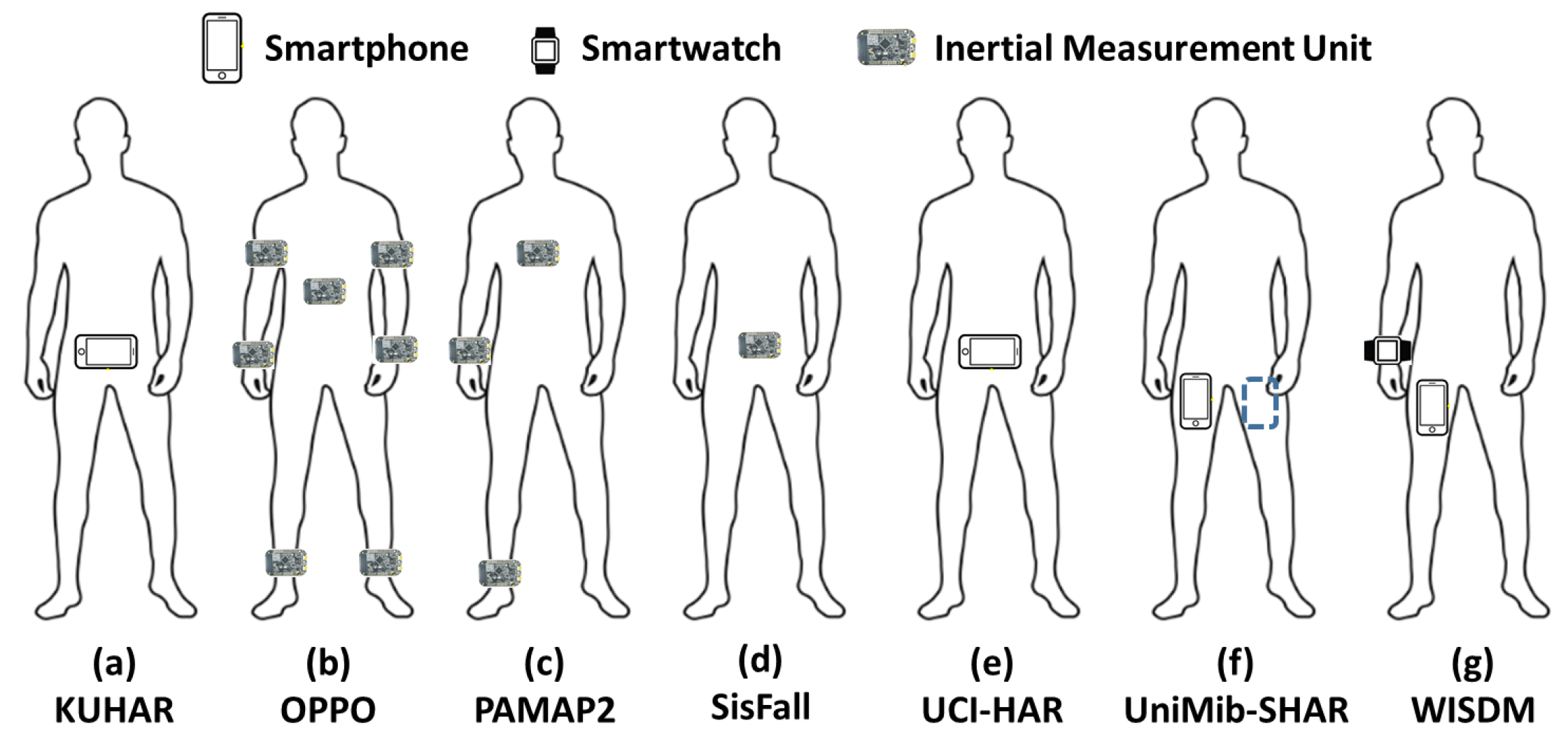
3.1. Experimental HAR Datasets
3.1.1. KU-HAR
3.1.2. OPPORTUNITY (Oppo)
3.1.3. PAMAP2
3.1.4. Sis-Fall
3.1.5. UCI-HAR
3.1.6. UniMiB SHAR
3.1.7. WISDM
3.2. Applied Metaheuristic Optimization Algorithms
3.2.1. Aquila Optimizer (AO)
3.2.2. Arithmetic Optimization Algorithm (AOA)
3.2.3. Marine Predators Algorithm (MPA)
3.2.4. Slime Mold Algorithm
3.2.5. Whale Optimization Algorithm (WOA)
3.2.6. Artificial Bee Colony (ABC) Algorithm
3.2.7. Grey Wolf Optimizer (GWO)
3.2.8. Genetic Algorithm
3.2.9. Particle Swarm Optimization (PSO)
3.3. Data Cleaning, Filtration, and Segmentation
3.4. Feature Extraction
3.5. Feature Optimization
| Algorithm 1Cost Function (, , , , ) |
|
4. Experiments
4.1. Experiments Setup
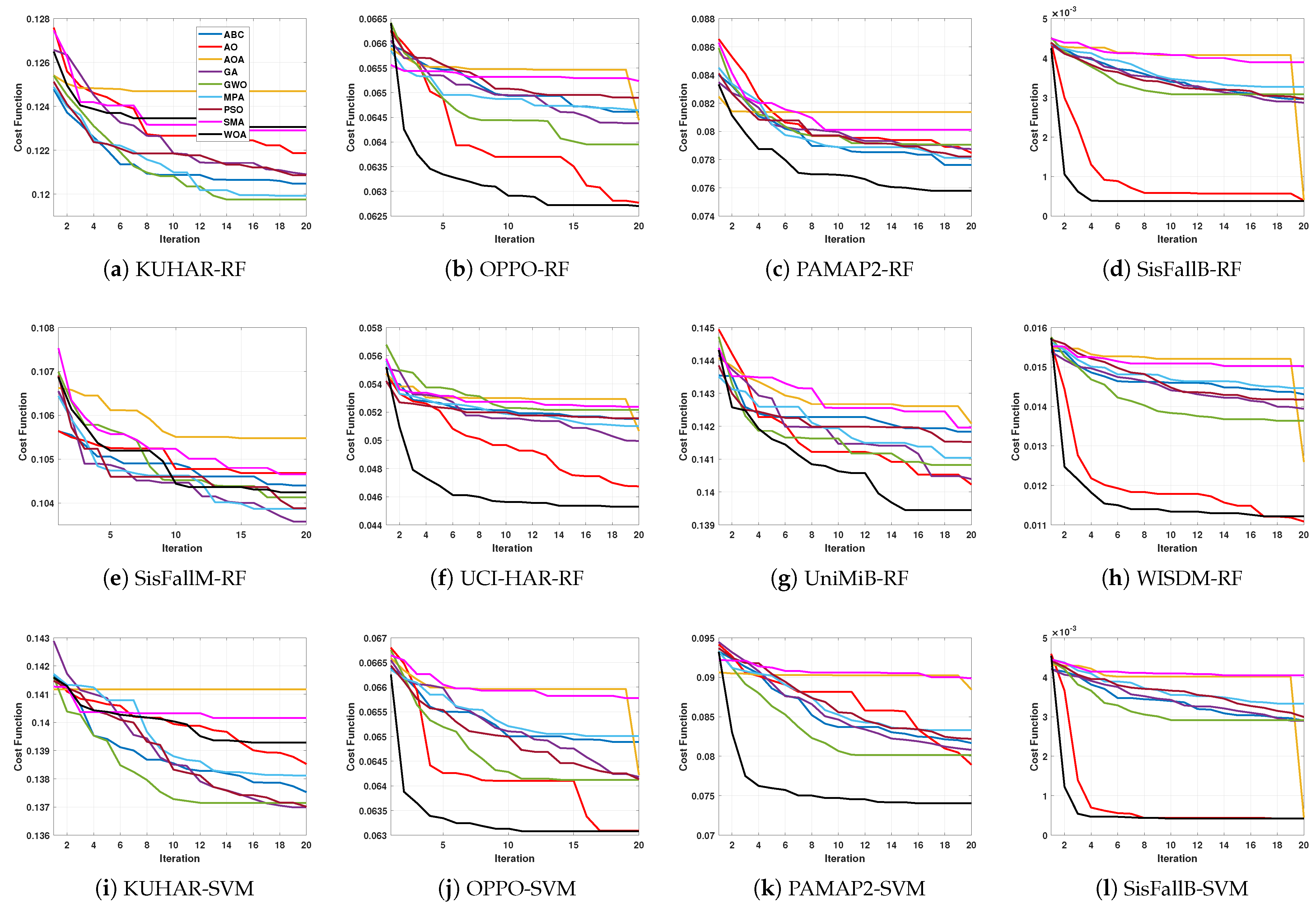
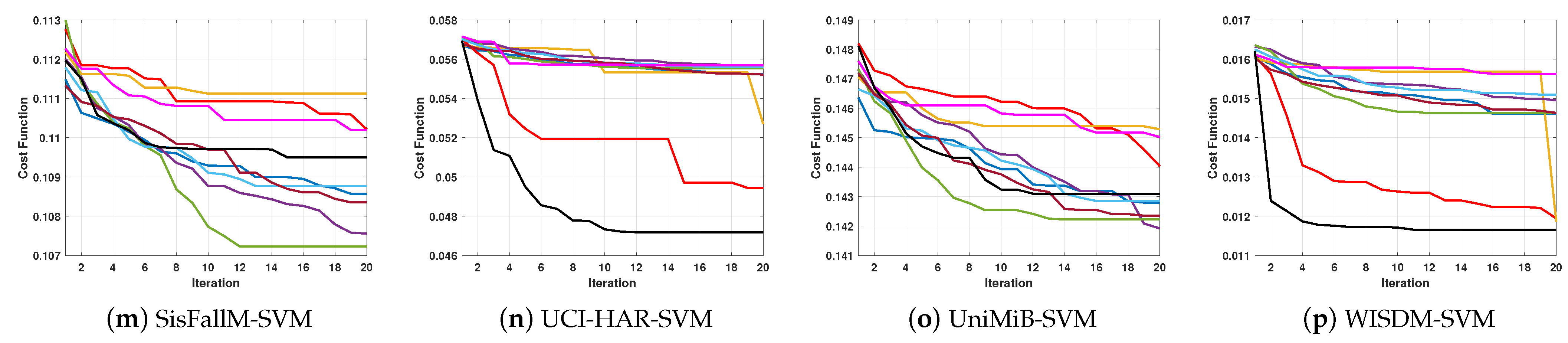
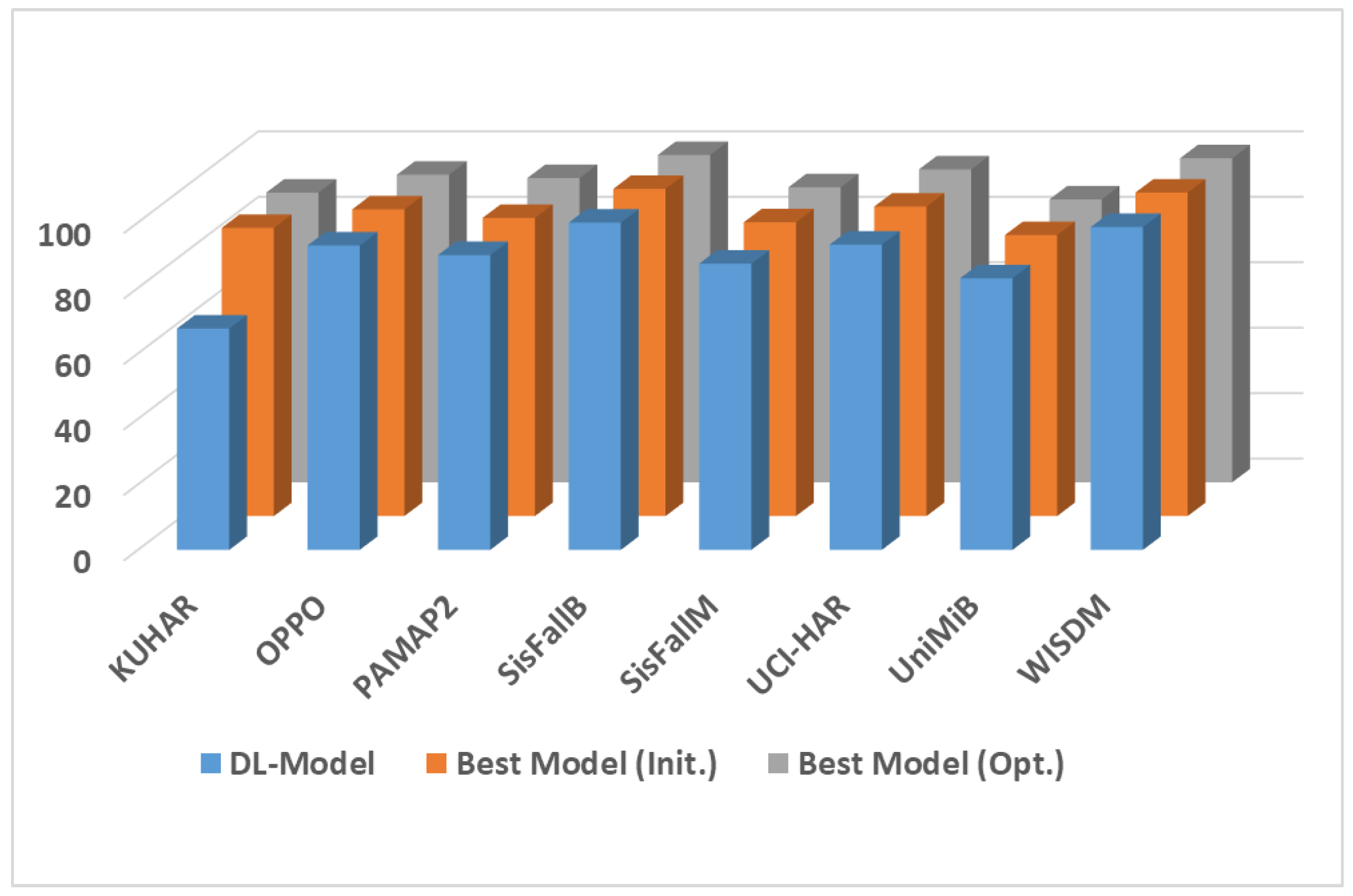
4.2. Results
5. Comparison with Previous Related Studies

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| OPPO | PAMAP2 | UCI-HAR | UniMiB | WISDM | |||||
|---|---|---|---|---|---|---|---|---|---|
| Multi-ResAtt [80] | 86.85 | Multi-ResAtt [80] | 90.08 | Daho et al. [11] | 95.23 | Multi-ResAtt [80] | 74.94 | LSTM-CNN [35] | 95.01 |
| Gao et al. [45] | 82.75 | Gao et al. [45] | 93.16 | LSTM-CNN [35] | 95.31 | DanHAR [45] | 79.03 | U-Net [81] | 96.40 |
| Teng et al. [73] | 81 | Teng et al. [73] | 92.97 | DSmT [82] | 95.31 | Teng et al. [73] | 78.07 | MHCA [83] | 96.40 |
| iSPLInception [41] | 88.14 | DanHAR [45] | 93.16 | Net-att3-pc-tanh [34] | 93.83 | Predsim ResNet [84] | 80.33 | DanHAR [45] | 98.85 |
| Proposed | 93.90 | Proposed | 92.63 | Proposed | 95.51 | Proposed | 86.25 | Proposed | 98.95 |
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hasegawa, T. Smartphone sensor-based human activity recognition robust to different sampling rates. IEEE Sens. J. 2020, 21, 6930–6941. [Google Scholar] [CrossRef]
- Beddiar, D.R.; Nini, B.; Sabokrou, M.; Hadid, A. Vision-based human activity recognition: A survey. Multimed. Tools Appl. 2020, 79, 30509–30555. [Google Scholar] [CrossRef]
- Gu, F.; Chung, M.H.; Chignell, M.; Valaee, S.; Zhou, B.; Liu, X. A survey on deep learning for human activity recognition. ACM Comput. Surv. (CSUR) 2021, 54, 1–34. [Google Scholar] [CrossRef]
- Bouchabou, D.; Nguyen, S.M.; Lohr, C.; LeDuc, B.; Kanellos, I. A survey of human activity recognition in smart homes based on IoT sensors algorithms: Taxonomies, challenges, and opportunities with deep learning. Sensors 2021, 21, 6037. [Google Scholar] [CrossRef]
- Li, X.; He, Y.; Jing, X. A survey of deep learning-based human activity recognition in radar. Remote Sens. 2019, 11, 1068. [Google Scholar] [CrossRef] [Green Version]
- Al-Qaness, M.A.; Abd Elaziz, M.; Kim, S.; Ewees, A.A.; Abbasi, A.A.; Alhaj, Y.A.; Hawbani, A. Channel state information from pure communication to sense and track human motion: A survey. Sensors 2019, 19, 3329. [Google Scholar] [CrossRef] [Green Version]
- Fatani, A.; Dahou, A.; Al-Qaness, M.A.; Lu, S.; Elaziz, M.A. Advanced feature extraction and selection approach using deep learning and Aquila optimizer for IoT intrusion detection system. Sensors 2021, 22, 140. [Google Scholar] [CrossRef]
- Dahou, A.; Abd Elaziz, M.; Chelloug, S.A.; Awadallah, M.A.; Al-Betar, M.A.; Al-qaness, M.A.; Forestiero, A. Intrusion Detection System for IoT Based on Deep Learning and Modified Reptile Search Algorithm. Comput. Intell. Neurosci. 2022, 2022, 1–15. [Google Scholar] [CrossRef]
- Li, L.; Pan, J.S.; Zhuang, Z.; Chu, S.C. A Novel Feature Selection Algorithm Based on Aquila Optimizer for COVID-19 Classification. In Proceedings of the International Conference on Intelligent Information Processing, Bucharest, Romania, 29–30 September 2022; pp. 30–41. [Google Scholar]
- Bansal, P.; Gehlot, K.; Singhal, A.; Gupta, A. Automatic detection of osteosarcoma based on integrated features and feature selection using binary arithmetic optimization algorithm. Multimed. Tools Appl. 2022, 81, 8807–8834. [Google Scholar] [CrossRef]
- Dahou, A.; Al-qaness, M.A.; Abd Elaziz, M.; Helmi, A. Human activity recognition in IoHT applications using arithmetic optimization algorithm and deep learning. Measurement 2022, 199, 111445. [Google Scholar] [CrossRef]
- Sahlol, A.T.; Yousri, D.; Ewees, A.A.; Al-Qaness, M.A.; Damasevicius, R.; Elaziz, M.A. COVID-19 image classification using deep features and fractional-order marine predators algorithm. Sci. Rep. 2020, 10, 15364. [Google Scholar] [CrossRef] [PubMed]
- Rajinikanth, V.; Kadry, S.; Taniar, D.; Damaševičius, R.; Rauf, H.T. Breast-cancer detection using thermal images with marine-predators-algorithm selected features. In Proceedings of the 2021 Seventh International Conference on Bio Signals, Images, and Instrumentation (ICBSII), Chennai, India, 25–27 March 2021; pp. 1–6. [Google Scholar]
- Al-qaness, M.A.; Ewees, A.A.; Fan, H.; Abualigah, L.; Abd Elaziz, M. Boosted ANFIS model using augmented marine predator algorithm with mutation operators for wind power forecasting. Appl. Energy 2022, 314, 118851. [Google Scholar] [CrossRef]
- Wazery, Y.M.; Saber, E.; Houssein, E.H.; Ali, A.A.; Amer, E. An efficient slime mould algorithm combined with k-nearest neighbor for medical classification tasks. IEEE Access 2021, 9, 113666–113682. [Google Scholar] [CrossRef]
- Liu, Y.; Heidari, A.A.; Ye, X.; Liang, G.; Chen, H.; He, C. Boosting slime mould algorithm for parameter identification of photovoltaic models. Energy 2021, 234, 121164. [Google Scholar] [CrossRef]
- Maleki, N.; Zeinali, Y.; Niaki, S.T.A. A k-NN method for lung cancer prognosis with the use of a genetic algorithm for feature selection. Expert Syst. Appl. 2021, 164, 113981. [Google Scholar] [CrossRef]
- Abualigah, L.; Dulaimi, A.J. A novel feature selection method for data mining tasks using hybrid sine cosine algorithm and genetic algorithm. Clust. Comput. 2021, 24, 2161–2176. [Google Scholar] [CrossRef]
- Lappas, P.Z.; Yannacopoulos, A.N. A machine learning approach combining expert knowledge with genetic algorithms in feature selection for credit risk assessment. Appl. Soft Comput. 2021, 107, 107391. [Google Scholar] [CrossRef]
- Sathiyabhama, B.; Kumar, S.U.; Jayanthi, J.; Sathiya, T.; Ilavarasi, A.; Yuvarajan, V.; Gopikrishna, K. A novel feature selection framework based on grey wolf optimizer for mammogram image analysis. Neural Comput. Appl. 2021, 33, 14583–14602. [Google Scholar] [CrossRef]
- Rajammal, R.R.; Mirjalili, S.; Ekambaram, G.; Palanisamy, N. Binary Grey Wolf Optimizer with Mutation and Adaptive K-nearest Neighbour for Feature Selection in Parkinson’s Disease Diagnosis. Knowl. Based Syst. 2022, 246, 108701. [Google Scholar] [CrossRef]
- Preeti, P.; Deep, K. A Random Walk Grey Wolf Optimizer based on dispersion factor for feature selection on Chronic Disease Prediction. Expert Syst. Appl. 2022, 206, 117864. [Google Scholar] [CrossRef]
- Mohammadzadeh, H.; Gharehchopogh, F.S. A novel hybrid whale optimization algorithm with flower pollination algorithm for feature selection: Case study Email spam detection. Comput. Intell. 2021, 37, 176–209. [Google Scholar] [CrossRef]
- Hassouneh, Y.; Turabieh, H.; Thaher, T.; Tumar, I.; Chantar, H.; Too, J. Boosted whale optimization algorithm with natural selection operators for software fault prediction. IEEE Access 2021, 9, 14239–14258. [Google Scholar] [CrossRef]
- Moorthy, U.; Gandhi, U.D. A novel optimal feature selection technique for medical data classification using ANOVA based whale optimization. J. Ambient Intell. Humaniz. Comput. 2021, 12, 3527–3538. [Google Scholar] [CrossRef]
- Shafi, A.; Molla, M.; Jui, J.J.; Rahman, M.M. Detection of colon cancer based on microarray dataset using machine learning as a feature selection and classification techniques. SN Appl. Sci. 2020, 2, 1243. [Google Scholar] [CrossRef]
- Agrawal, V.; Chandra, S. Feature selection using Artificial Bee Colony algorithm for medical image classification. In Proceedings of the 2015 Eighth International Conference on Contemporary Computing (IC3), Noida, India, 20–22 August 2015; pp. 171–176. [Google Scholar]
- Rani, M.; Gagandeep. Employing Artificial Bee Colony Algorithm for Feature Selection in Intrusion Detection System. In Proceedings of the 2021 8th International Conference on Computing for Sustainable Global Development (INDIACom), New Delhi, India, 17–19 March 2021; pp. 496–500.
- Sharkawy, R.; Ibrahim, K.; Salama, M.; Bartnikas, R. Particle swarm optimization feature selection for the classification of conducting particles in transformer oil. IEEE Trans. Dielectr. Electr. Insul. 2011, 18, 1897–1907. [Google Scholar] [CrossRef]
- Sakri, S.B.; Rashid, N.B.A.; Zain, Z.M. Particle swarm optimization feature selection for breast cancer recurrence prediction. IEEE Access 2018, 6, 29637–29647. [Google Scholar] [CrossRef]
- Kunhare, N.; Tiwari, R.; Dhar, J. Particle swarm optimization and feature selection for intrusion detection system. Sādhanā 2020, 45, 109. [Google Scholar] [CrossRef]
- Joshi, G.; Walambe, R.; Kotecha, K. A review on explainability in multimodal deep neural nets. IEEE Access 2021, 9, 59800–59821. [Google Scholar] [CrossRef]
- Deotale, D.; Verma, M.; Suresh, P.; Kotecha, K. Optimized hybrid RNN model for human activity recognition in untrimmed video. J. Electron. Imaging 2022, 31, 051409. [Google Scholar] [CrossRef]
- Wang, K.; He, J.; Zhang, L. Attention-based convolutional neural network for weakly labeled human activities’ recognition with wearable sensors. IEEE Sens. J. 2019, 19, 7598–7604. [Google Scholar] [CrossRef]
- Xia, K.; Huang, J.; Wang, H. LSTM-CNN architecture for human activity recognition. IEEE Access 2020, 8, 56855–56866. [Google Scholar] [CrossRef]
- Sikder, N.; Ahad, M.A.R.; Nahid, A.A. Human Action Recognition Based on a Sequential Deep Learning Model. In Proceedings of the 2021 Joint 10th International Conference on Informatics, Electronics & Vision (ICIEV) and 2021 5th International Conference on Imaging, Vision & Pattern Recognition (icIVPR), Krakow, Poland, 16–18 June 2021; pp. 1–7. [Google Scholar]
- Kumar, P.; Suresh, S. DeepTransHHAR: Inter-subjects Heterogeneous Activity Recognition Approach in the Non-identical Environment Using Wearable Sensors. Natl. Acad. Sci. Lett. 2022, 45, 317–323. [Google Scholar] [CrossRef]
- Dua, N.; Singh, S.N.; Semwal, V.B. Multi-input CNN-GRU based human activity recognition using wearable sensors. Computing 2021, 103, 1461–1478. [Google Scholar] [CrossRef]
- Khatun, M.A.; Yousuf, M.A.; Ahmed, S.; Uddin, M.Z.; Alyami, S.A.; Al-Ashhab, S.; Akhdar, H.F.; Khan, A.; Azad, A.; Moni, M.A. Deep CNN-LSTM with Self-Attention Model for Human Activity Recognition using Wearable Sensor. IEEE J. Transl. Eng. Health Med. 2022, 10, 2700316. [Google Scholar] [CrossRef] [PubMed]
- Ghate, V.; Hemalatha, S. Hybrid deep learning approaches for smartphone sensor-based human activity recognition. Multimed. Tools Appl. 2021, 80, 35585–35604. [Google Scholar] [CrossRef]
- Ronald, M.; Poulose, A.; Han, D.S. iSPLInception: An inception-ResNet deep learning architecture for human activity recognition. IEEE Access 2021, 9, 68985–69001. [Google Scholar] [CrossRef]
- Tufek, N.; Yalcin, M.; Altintas, M.; Kalaoglu, F.; Li, Y.; Bahadir, S.K. Human action recognition using deep learning methods on limited sensory data. IEEE Sens. J. 2019, 20, 3101–3112. [Google Scholar] [CrossRef] [Green Version]
- Gao, W.; Zhang, L.; Huang, W.; Min, F.; He, J.; Song, A. Deep neural networks for sensor-based human activity recognition using selective kernel convolution. IEEE Trans. Instrum. Meas. 2021, 70, 2512313. [Google Scholar] [CrossRef]
- Huang, W.; Zhang, L.; Teng, Q.; Song, C.; He, J. The convolutional neural networks training with channel-selectivity for human activity recognition based on sensors. IEEE J. Biomed. Health Inform. 2021, 25, 3834–3843. [Google Scholar] [CrossRef] [PubMed]
- Gao, W.; Zhang, L.; Teng, Q.; He, J.; Wu, H. DanHAR: Dual attention network for multimodal human activity recognition using wearable sensors. Appl. Soft Comput. 2021, 111, 107728. [Google Scholar] [CrossRef]
- Tang, Y.; Zhang, L.; Min, F.; He, J. Multi-scale deep feature learning for human activity recognition using wearable sensors. IEEE Trans. Ind. Electron. 2022. [Google Scholar] [CrossRef]
- Berlin, S.J.; John, M. Particle swarm optimization with deep learning for human action recognition. Multimed. Tools Appl. 2020, 79, 17349–17371. [Google Scholar] [CrossRef]
- Zhang, R. Sports action recognition based on particle swarm optimization neural networks. Wirel. Commun. Mob. Comput. 2022, 2022, 6912315. [Google Scholar] [CrossRef]
- Guha, R.; Khan, A.H.; Singh, P.K.; Sarkar, R.; Bhattacharjee, D. CGA: A new feature selection model for visual human action recognition. Neural Comput. Appl. 2021, 33, 5267–5286. [Google Scholar] [CrossRef]
- Helmi, A.M.; Al-Qaness, M.A.; Dahou, A.; Damaševičius, R.; Krilavičius, T.; Elaziz, M.A. A novel hybrid gradient-based optimizer and grey wolf optimizer feature selection method for human activity recognition using smartphone sensors. Entropy 2021, 23, 1065. [Google Scholar] [CrossRef]
- Sikder, N.; Nahid, A.A. KU-HAR: An open dataset for heterogeneous human activity recognition. Pattern Recognit. Lett. 2021, 146, 46–54. [Google Scholar] [CrossRef]
- Chavarriaga, R.; Sagha, H.; Calatroni, A.; Digumarti, S.T.; Tröster, G.; Millán, J.D.R.; Roggen, D. The Opportunity challenge: A benchmark database for on-body sensor-based activity recognition. Pattern Recognit. Lett. 2013, 34, 2033–2042. [Google Scholar] [CrossRef] [Green Version]
- Reiss, A.; Stricker, D. Introducing a new benchmarked dataset for activity monitoring. In Proceedings of the 2012 16th International Symposium on Wearable Computers, Newcastle, UK, 18–22 June 2012; pp. 108–109. [Google Scholar]
- Sucerquia, A.; López, J.D.; Vargas-Bonilla, J.F. SisFall: A fall and movement dataset. Sensors 2017, 17, 198. [Google Scholar] [CrossRef] [Green Version]
- Anguita, D.; Ghio, A.; Oneto, L.; Parra, X.; Reyes-Ortiz, J.L. A public domain dataset for human activity recognition using smartphones. In Proceedings of the European Symposium on Artificial Neural Networks, Computational Intelligence and Machine Learning, Bruges, Belgium, 24–26 April 2013. [Google Scholar]
- Micucci, D.; Mobilio, M.; Napoletano, P. Unimib shar: A dataset for human activity recognition using acceleration data from smartphones. Appl. Sci. 2017, 7, 1101. [Google Scholar] [CrossRef] [Green Version]
- Weiss, G.M.; Lockhart, J. The impact of personalization on smartphone-based activity recognition. In Proceedings of the Workshops at the Twenty-Sixth AAAI Conference on Artificial Intelligence, Toronto, ON, Canada, 22–26 July 2012. [Google Scholar]
- Abualigah, L.; Yousri, D.; Abd Elaziz, M.; Ewees, A.A.; Al-Qaness, M.A.; Gandomi, A.H. Aquila optimizer: A novel meta-heuristic optimization algorithm. Comput. Ind. Eng. 2021, 157, 107250. [Google Scholar] [CrossRef]
- Abualigah, L.; Diabat, A.; Mirjalili, S.; Abd Elaziz, M.; Gandomi, A.H. The arithmetic optimization algorithm. Comput. Methods Appl. Mech. Eng. 2021, 376, 113609. [Google Scholar] [CrossRef]
- Faramarzi, A.; Heidarinejad, M.; Mirjalili, S.; Gandomi, A.H. Marine Predators Algorithm: A nature-inspired metaheuristic. Expert Syst. Appl. 2020, 152, 113377. [Google Scholar] [CrossRef]
- Li, S.; Chen, H.; Wang, M.; Heidari, A.A.; Mirjalili, S. Slime mould algorithm: A new method for stochastic optimization. Future Gener. Comput. Syst. 2020, 111, 300–323. [Google Scholar] [CrossRef]
- Mirjalili, S.; Lewis, A. The whale optimization algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Karaboga, D. An Idea Based on Honey Bee Swarm for Numerical Optimization; Technical Report-tr06; Erciyes University: Kayseri, Turkey, 2005. [Google Scholar]
- Tereshko, V.; Loengarov, A. Collective decision making in honey-bee foraging dynamics. Comput. Inf. Syst. 2005, 9, 1. [Google Scholar]
- Karaboga, D.; Basturk, B. A powerful and efficient algorithm for numerical function optimization: Artificial bee colony (ABC) algorithm. J. Glob. Optim. 2007, 39, 459–471. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey wolf optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef] [Green Version]
- Goldberg, D.E.; Richardson, J. Genetic algorithms with sharing for multimodal function optimization. In Proceedings of the Second International Conference on Genetic Algorithms, Cambridge, MA, USA, 28–31 July 1987; Volume 4149. [Google Scholar]
- Goldberg, D.E. Genetic Algorithms; Pearson Education India: Bengaluru, India, 2013. [Google Scholar]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95-International Conference on Neural Networks, Perth, WA, Australia, 27 November–1 December 1995; Volume 4, pp. 1942–1948. [Google Scholar]
- Preece, S.J.; Goulermas, J.Y.; Kenney, L.P.; Howard, D. A comparison of feature extraction methods for the classification of dynamic activities from accelerometer data. IEEE Trans. Biomed. Eng. 2008, 56, 871–879. [Google Scholar] [CrossRef] [PubMed]
- Shoaib, M.; Bosch, S.; Incel, O.D.; Scholten, H.; Havinga, P.J. Complex human activity recognition using smartphone and wrist-worn motion sensors. Sensors 2016, 16, 426. [Google Scholar] [CrossRef]
- Voicu, R.A.; Dobre, C.; Bajenaru, L.; Ciobanu, R.I. Human physical activity recognition using smartphone sensors. Sensors 2019, 19, 458. [Google Scholar] [CrossRef] [Green Version]
- Teng, Q.; Wang, K.; Zhang, L.; He, J. The layer-wise training convolutional neural networks using local loss for sensor-based human activity recognition. IEEE Sens. J. 2020, 20, 7265–7274. [Google Scholar] [CrossRef]
- Ma, H.; Li, W.; Zhang, X.; Gao, S.; Lu, S. AttnSense: Multi-level Attention Mechanism For Multimodal Human Activity Recognition. In Proceedings of the Twenty-Eighth International Joint Conference on Artificial Intelligence, Macao, China, 10–16 August 2019; pp. 3109–3115. [Google Scholar]
- Sousa Lima, W.; Souto, E.; El-Khatib, K.; Jalali, R.; Gama, J. Human activity recognition using inertial sensors in a smartphone: An overview. Sensors 2019, 19, 3213. [Google Scholar] [CrossRef] [Green Version]
- Anguita, D.; Ghio, A.; Oneto, L.; Parra, X.; Reyes-Ortiz, J.L. Human activity recognition on smartphones using a multiclass hardware-friendly support vector machine. In Proceedings of the International Workshop on Ambient Assisted Living, Vitoria-Gasteiz, Spain, 3–5 December 2012; pp. 216–223. [Google Scholar]
- Cristianini, N.; Shawe-Taylor, J. An Introduction to Support Vector Machines and Other Kernel-Based Learning Methods; Cambridge University Press: Cambridge, UK, 2000. [Google Scholar]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Mrozek, D.; Koczur, A.; Małysiak-Mrozek, B. Fall detection in older adults with mobile IoT devices and machine learning in the cloud and on the edge. Inf. Sci. 2020, 537, 132–147. [Google Scholar] [CrossRef]
- Al-qaness, M.A.; Dahou, A.; Abd Elaziz, M.; Helmi, A. Multi-ResAtt: Multilevel Residual Network with Attention for Human Activity Recognition Using Wearable Sensors. IEEE Trans. Ind. Inform. 2022. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, Z.; Zhang, Y.; Bao, J.; Zhang, Y.; Deng, H. Human activity recognition based on motion sensor using u-net. IEEE Access 2019, 7, 75213–75226. [Google Scholar] [CrossRef]
- Li, X.; Dezert, J.; Khyam, M.O.; Noor-A-Rahim, M.; Ge, S.S.; Dezert, J.; Dong, Y. DSmT-Based Fusion Strategy for Human Activity Recognition in Body Sensor Networks. IEEE Trans. Ind. Inform. 2020, 16, 7138–7149. [Google Scholar]
- Zhang, H.; Xiao, Z.; Wang, J.; Li, F.; Szczerbicki, E. A novel IoT-perceptive human activity recognition (HAR) approach using multihead convolutional attention. IEEE Internet Things J. 2019, 7, 1072–1080. [Google Scholar] [CrossRef]
- Teng, Q.; Zhang, L.; Tang, Y.; Song, S.; Wang, X.; He, J. Block-wise training residual networks on multi-channel time series for human activity recognition. IEEE Sens. J. 2021, 21, 18063–18074. [Google Scholar] [CrossRef]






| Algorithm | Parameters |
|---|---|
| ABC | |
| AO | , , , , , , |
| AOA | , , , |
| GA | Crossover , Mutation |
| GWO | |
| MPA | , |
| PSO | Inertia weight (w) = 1, , , |
| SMA | |
| WOA | , a2: , |
| KUHAR | OPPO | PAMAP2 | SisFallB | SisFallM | UCI-HAR | UniMiB | WISDM | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| RF | SVM | RF | SVM | RF | SVM | RF | SVM | RF | SVM | RF | SVM | RF | SVM | RF | SVM | |
| ABC | 88.03 | 86.61 | 93.73 | 93.84 | 92.06 | 92.13 | 99.97 | 99.97 | 89.59 | 89.50 | 94.85 | 94.76 | 85.74 | 86.02 | 98.83 | 98.83 |
| AO | 88.3 | 86.83 | 93.81 | 93.76 | 92.44 | 92.2 | 99.98 | 99.97 | 89.92 | 89.33 | 95.37 | 95.07 | 86.17 | 85.75 | 98.95 | 98.87 |
| AOA | 87.89 | 86.66 | 93.64 | 93.61 | 92.23 | 91.44 | 99.97 | 99.97 | 89.82 | 89.26 | 95.12 | 94.9 | 86 | 85.69 | 98.79 | 98.85 |
| GA | 87.95 | 86.7 | 93.74 | 93.89 | 91.67 | 92.25 | 99.97 | 99.97 | 89.47 | 89.62 | 95.15 | 94.75 | 85.87 | 86.1 | 98.85 | 98.82 |
| GWO | 88.4 | 86.69 | 93.90 | 93.9 | 92.5 | 92.31 | 99.97 | 99.97 | 89.93 | 89.65 | 95.13 | 94.77 | 86.25 | 86.1 | 98.95 | 98.83 |
| MPA | 88.41 | 86.6 | 93.88 | 93.86 | 92.58 | 92.02 | 99.97 | 99.97 | 89.96 | 89.50 | 95.27 | 94.75 | 86.22 | 86.02 | 98.94 | 98.82 |
| PSO | 88.32 | 86.71 | 93.87 | 93.91 | 92.58 | 92.1 | 99.97 | 99.97 | 90.00 | 89.54 | 95.21 | 94.78 | 86.21 | 86.05 | 98.95 | 98.82 |
| SMA | 87.77 | 86.38 | 93.72 | 93.76 | 91.63 | 91.34 | 99.97 | 99.97 | 89.52 | 89.37 | 94.62 | 94.82 | 85.71 | 85.82 | 98.85 | 98.8 |
| WOA | 88.31 | 86.7 | 93.81 | 93.75 | 92.57 | 92.63 | 99.98 | 99.97 | 89.91 | 89.33 | 95.51 | 95.28 | 86.14 | 85.85 | 98.95 | 98.87 |
| KUHAR | OPPO | PAMAP2 | SisFallB | SisFallM | UCI-HAR | UniMiB | WISDM | |
|---|---|---|---|---|---|---|---|---|
| RF | RF/SVM | SVM | RF | RF | RF | RF | RF | |
| ABC | 88.37 | 93.79 | 92.36 | 99.97 | 89.92 | 95.11 | 85.96 | 98.85 |
| AO | 88.53 | 93.92 | 92.48 | 100 | 90.13 | 95.49 | 86.44 | 98.99 |
| AOA | 88.09 | 93.73 | 91.57 | 99.97 | 89.86 | 95.22 | 86.13 | 98.81 |
| GA | 88.07 | 93.78 | 92.38 | 99.97 | 89.59 | 95.39 | 86.3 | 98.91 |
| GWO | 88.49 | 93.95 | 92.42 | 99.97 | 89.98 | 95.42 | 86.33 | 98.97 |
| MPA | 88.52 | 93.91 | 92.3 | 99.97 | 90.04 | 95.39 | 86.35 | 98.97 |
| PSO | 88.44 | 93.91 | 92.32 | 99.97 | 90.1 | 95.25 | 86.33 | 98.97 |
| SMA | 88.06 | 93.86 | 91.71 | 99.97 | 89.68 | 94.74 | 86.04 | 98.87 |
| WOA | 88.42 | 93.83 | 92.95 | 100 | 89.98 | 95.59 | 86.18 | 98.99 |
| KUHAR | OPPO | PAMAP2 | SisFallB | SisFallM | UCI-HAR | UniMiB | WISDM | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| RF | SVM | RF | SVM | RF | SVM | RF | SVM | RF | SVM | RF | SVM | RF | SVM | RF | SVM | |
| ABC | 51.41 ± 4.6 | 50 ± 6.04 | 60.31 ± 5.07 | 60.94 ± 3.87 | 57.66 ± 4.44 | 61.72 ± 3.39 | 73.13 ± 2.51 | 73.75 ± 2.97 | 51.56 ± 3.67 | 53.13 ± 8.15 | 56.72 ± 3.58 | 66.09 ± 4.04 | 54.22 ± 7.5 | 55.78 ± 7.83 | 63.91 ± 5.63 | 69.22 ± 2.07 |
| AO | 39.69 ± 14.7 | 17.97 ± 14.53 | 85.47 ± 8.96 | 87.19 ± 4.93 | 63.13 ± 13.33 | 82.97 ± 8.44 | 98.44 ± 1.22 | 98.75 ± 0.55 | 51.09 ± 3.91 | 53.91 ± 12.59 | 90.78 ± 5.02 | 93.28 ± 2.07 | 66.41 ± 16.4 | 69.84 ± 13.85 | 92.81 ± 2.95 | 92.5 ± 3.44 |
| AOA | 51.88 ± 8.44 | 8.59 ± 24.6 | 85.31 ± 10.71 | 90.47 ± 2.95 | 55.31 ± 2.59 | 62.34 ± 24.16 | 98.91 ± 0.55 | 98.44 ± 1.41 | 52.66 ± 3.21 | 51.88 ± 5.41 | 76.25 ± 27.52 | 78.13 ± 28.52 | 64.69 ± 13.33 | 63.44 ± 12.95 | 93.44 ± 4.1 | 95.31 ± 1.87 |
| GA | 48.75 ± 5.13 | 46.56 ± 4.45 | 59.53 ± 2.39 | 62.66 ± 3.83 | 54.06 ± 4.97 | 58.59 ± 4.47 | 74.06 ± 2.05 | 73.75 ± 4.28 | 56.25 ± 3.61 | 51.41 ± 4.32 | 55.63 ± 8.7 | 62.66 ± 5.54 | 53.44 ± 4.72 | 56.72 ± 4.51 | 65.63 ± 3.94 | 67.34 ± 2.39 |
| GWO | 50.47 ± 3.78 | 46.25 ± 2.59 | 64.53 ± 4.77 | 62.34 ± 3.42 | 51.88 ± 6.91 | 59.69 ± 2.3 | 71.88 ± 3.46 | 73.59 ± 4.27 | 55.47 ± 4.9 | 51.72 ± 4.76 | 59.84 ± 7.13 | 61.72 ± 4.06 | 52.5 ± 2.17 | 53.13 ± 4.47 | 67.5 ± 2.19 | 69.06 ± 6.35 |
| MPA | 47.81 ± 1.3 | 45.31 ± 4.3 | 59.38 ± 4.64 | 57.5 ± 5.64 | 53.28 ± 11.23 | 56.56 ± 2.41 | 70 ± 5.37 | 69.38 ± 2.17 | 55.16 ± 2.79 | 51.72 ± 5.76 | 57.81 ± 3.24 | 62.97 ± 3.21 | 53.13 ± 1.87 | 54.69 ± 4.53 | 60.31 ± 3.7 | 65.47 ± 1.64 |
| PSO | 46.88 ± 3.67 | 44.69 ± 6.61 | 57.5 ± 8.44 | 61.09 ± 5.63 | 51.88 ± 2.19 | 59.84 ± 4.83 | 73.13 ± 4.28 | 72.81 ± 1.64 | 50.78 ± 11.11 | 51.72 ± 5.93 | 58.28 ± 6.73 | 64.22 ± 4.15 | 50 ± 5.96 | 56.88 ± 3.11 | 61.72 ± 2.74 | 70.16 ± 5.59 |
| SMA | 46.88 ± 2.74 | 46.09 ± 5.52 | 58.59 ± 4.3 | 59.69 ± 3.44 | 55.31 ± 5.5 | 57.97 ± 6.3 | 63.75 ± 2.51 | 62.19 ± 1.52 | 53.75 ± 3.27 | 50.47 ± 5.59 | 53.59 ± 4.34 | 56.09 ± 10.47 | 55.78 ± 5.32 | 53.13 ± 5.79 | 60.62 ± 2.7 | 62.5 ± 3 |
| WOA | 47.81 ± 1.3 | 45.31 ± 4.3 | 59.38 ± 4.64 | 57.5 ± 5.64 | 53.28 ± 11.23 | 56.56 ± 2.41 | 70 ± 5.37 | 69.38 ± 2.17 | 55.16 ± 2.79 | 61.09 ± 11.43 | 57.81 ± 3.24 | 62.97 ± 3.21 | 53.13 ± 1.87 | 54.69 ± 4.53 | 60.31 ± 3.7 | 65.47 ± 1.64 |
| Activity | Pre | Rec | F1 |
|---|---|---|---|
| Standing | 76.29 | 73.32 | 74.77 |
| Sitting | 98.3 | 95.7 | 96.98 |
| Talking-Sit | 94.8 | 96.23 | 95.51 |
| Talking-Stand | 92.86 | 95.79 | 94.3 |
| Standing-Sit | 96 | 92.31 | 94.12 |
| Laying | 93.85 | 94.38 | 94.12 |
| Laying-Stand | 95.2 | 91.21 | 93.16 |
| Picking | 95.71 | 95.3 | 95.5 |
| Jumping | 53.36 | 91.81 | 67.5 |
| Pushing-up | 89.82 | 81.82 | 85.63 |
| Sitting-up | 97.11 | 95.89 | 96.5 |
| Walking | 98.48 | 99.23 | 98.86 |
| Walking-backward | 80.62 | 33.64 | 47.47 |
| Walking-circle | 97.19 | 98.11 | 97.65 |
| Running | 96.52 | 97 | 96.76 |
| Stairs up | 96.94 | 95 | 95.96 |
| Stairs down | 97.84 | 94.44 | 96.11 |
| Activity | Pre | Rec | F1 |
|---|---|---|---|
| NULL | 95.37 | 98.49 | 96.9 |
| Open Door 1 | 94.03 | 80.77 | 86.9 |
| Open Door 2 | 97.5 | 90.7 | 93.98 |
| Close Door 1 | 91.23 | 81.25 | 85.95 |
| Close Door 2 | 96.67 | 93.55 | 95.08 |
| Open Fridge | 89.04 | 83.87 | 86.38 |
| Close Fridge | 88.99 | 71.85 | 79.51 |
| Open Dishwasher | 79.63 | 69.35 | 74.14 |
| Close Dishwasher | 68.52 | 66.07 | 67.27 |
| Open Drawer 1 | 46.88 | 62.5 | 53.57 |
| Close Drawer 1 | 46.67 | 25.93 | 33.33 |
| Open Drawer 2 | 57.14 | 64 | 60.38 |
| Close Drawer 2 | 27.27 | 45 | 33.96 |
| Open Drawer 3 | 68.85 | 79.25 | 73.68 |
| Close Drawer 3 | 97.14 | 70.83 | 81.93 |
| Clean Table | 81.4 | 57.38 | 67.31 |
| Drink from Cup | 91.94 | 58.76 | 71.7 |
| Toggle Switch | 87.5 | 60.87 | 71.79 |
| Activity | Pre | Rec | F1 |
|---|---|---|---|
| Lying | 95.77 | 93.61 | 94.68 |
| Sitting | 97 | 95.67 | 96.33 |
| Standing | 84.06 | 91.34 | 87.55 |
| Normal Walking | 86.19 | 96.98 | 91.27 |
| Running | 99.78 | 98.7 | 99.24 |
| Cycling | 96.43 | 99.61 | 97.99 |
| Nordic Walking | 95.71 | 95.71 | 95.71 |
| Ascending Stairs | 91.21 | 95.82 | 93.46 |
| Descending Stairs | 95.2 | 93.83 | 94.51 |
| Vacuuming | 98.58 | 61.5 | 75.75 |
| Ironing | 83.99 | 90.79 | 87.26 |
| Rope Jumping | 97.15 | 99.09 | 98.11 |
| Activity | Pre | Rec | F1 |
|---|---|---|---|
| Fall | 100 | 100 | 100 |
| No Fall | 100 | 100 | 100 |
| Activity | Pre | Rec | F1 |
|---|---|---|---|
| Walking Slowly | 98.71 | 98.71 | 98.71 |
| Walking Quickly | 100 | 100 | 100 |
| Jogging Slowly | 98 | 98.39 | 98.2 |
| Jogging Quickly | 98.64 | 97.75 | 98.19 |
| Walking upstairs and downstairs slowly | 92.25 | 92.58 | 92.42 |
| Walking upstairs and downstairs quickly | 77.78 | 81.29 | 79.5 |
| Sitting in a half-height chair, waiting a moment, and getting up slowly | 79.86 | 77.08 | 78.45 |
| Sitting in a half-height chair, waiting a moment, and getting up quickly | 76.28 | 81.51 | 78.81 |
| Sitting in a low-height chair, waiting a moment, and getting up slowly | 70 | 74.34 | 72.1 |
| Sitting in a low-height chair, waiting a moment, and getting up quickly | 80 | 67.8 | 73.39 |
| Sitting a moment, trying to get up, and collapsing into a chair | 86.55 | 80.47 | 83.4 |
| Sitting a moment, lying slowly, waiting a moment, and sitting again | 93.91 | 93.91 | 93.91 |
| Sitting a moment, lying quickly, waiting a moment, and sitting again | 88.46 | 84.15 | 86.25 |
| Being on one’s back, changing to lateral position, waiting a moment, and changing to one’s back | 95.97 | 95.97 | 95.97 |
| Standing, slowly bending at knees, and getting up | 86.15 | 78.87 | 82.35 |
| Standing, slowly bending without bending knees, and getting up | 87.07 | 88.28 | 87.67 |
| Standing, getting into a car, remaining seated, and getting out of the car | 82.49 | 91.76 | 86.88 |
| Stumbling while walking | 97.62 | 95.35 | 96.47 |
| Gently jumping without falling (trying to reach a high object) | 88.51 | 82.8 | 85.56 |
| Falling | 99.44 | 99.44 | 99.44 |
| Activity | Pre | Rec | F1 |
|---|---|---|---|
| Walking | 99.59 | 97.98 | 98.78 |
| Walking Upstairs | 98.31 | 98.51 | 98.41 |
| Walking Downstairs | 96.74 | 99.05 | 97.88 |
| Sitting | 92.05 | 84.93 | 88.35 |
| Standing | 88.43 | 93.42 | 90.86 |
| Laying Down | 99.08 | 100 | 99.54 |
| Activity | Pre | Rec | F1 |
|---|---|---|---|
| Standing Up From Sitting | 64.33 | 68.24 | 66.23 |
| Standing Up From Lying | 87.5 | 77.21 | 82.03 |
| Walking | 76.07 | 75.61 | 75.84 |
| Running | 64.33 | 65.58 | 64.95 |
| Going UpS | 77.7 | 70.59 | 73.97 |
| Jumping | 70.06 | 72.37 | 71.2 |
| Going DownS | 94.41 | 96.43 | 95.41 |
| Lying DownFS | 92.06 | 88.55 | 90.27 |
| Sitting Down | 92.75 | 88.61 | 90.63 |
| Falling Forward | 98.14 | 98.6 | 98.37 |
| Falling Rightward | 69.79 | 73.63 | 71.66 |
| Falling Backward | 99.14 | 99.31 | 99.22 |
| Hitting Obstacle | 73.68 | 73.68 | 73.68 |
| Falling With Protection | 72.37 | 77.46 | 74.83 |
| Falling Backward-Sitting Chair | 81.82 | 60 | 69.23 |
| Syncope Fall | 52.17 | 61.15 | 56.3 |
| Falling Leftward | 98.28 | 97.72 | 98 |
| Activity | Pre | Rec | F1 |
|---|---|---|---|
| Walking | 97.09 | 96.01 | 96.54 |
| Walking Upstairs | 100 | 98.81 | 99.4 |
| Walking Downstairs | 98.46 | 100 | 99.22 |
| Sitting | 95.83 | 95.67 | 95.75 |
| Standing | 100 | 99.95 | 99.97 |
| Jogging | 99.38 | 99.75 | 99.57 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Al-qaness, M.A.A.; Helmi, A.M.; Dahou, A.; Elaziz, M.A. The Applications of Metaheuristics for Human Activity Recognition and Fall Detection Using Wearable Sensors: A Comprehensive Analysis. Biosensors 2022, 12, 821. https://doi.org/10.3390/bios12100821
Al-qaness MAA, Helmi AM, Dahou A, Elaziz MA. The Applications of Metaheuristics for Human Activity Recognition and Fall Detection Using Wearable Sensors: A Comprehensive Analysis. Biosensors. 2022; 12(10):821. https://doi.org/10.3390/bios12100821
Chicago/Turabian StyleAl-qaness, Mohammed A. A., Ahmed M. Helmi, Abdelghani Dahou, and Mohamed Abd Elaziz. 2022. "The Applications of Metaheuristics for Human Activity Recognition and Fall Detection Using Wearable Sensors: A Comprehensive Analysis" Biosensors 12, no. 10: 821. https://doi.org/10.3390/bios12100821