
Modification of Frictional Properties of Hydrogel Surface via Laser Ablated Topographical Micro-Textures

Abstract
:1. Introduction
2. Materials and Methods
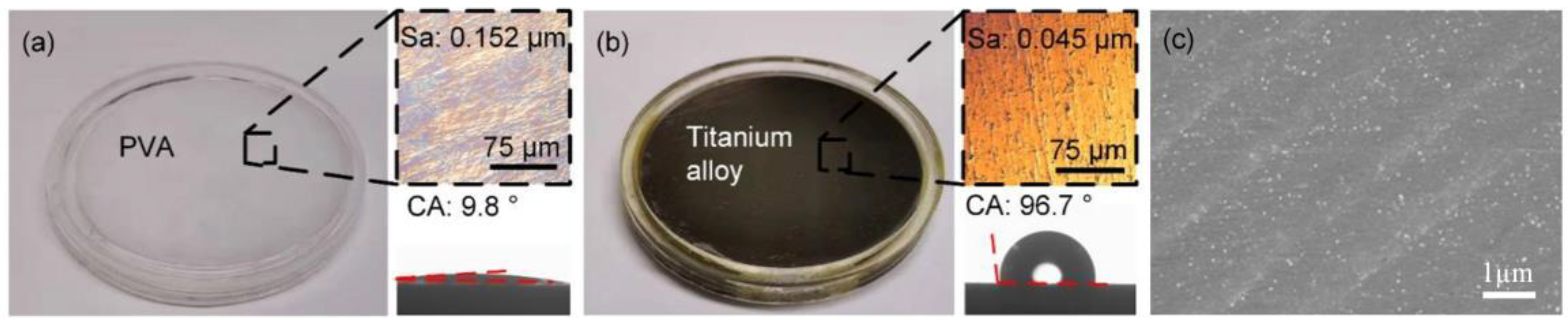
2.1. Frictional Pair Materials
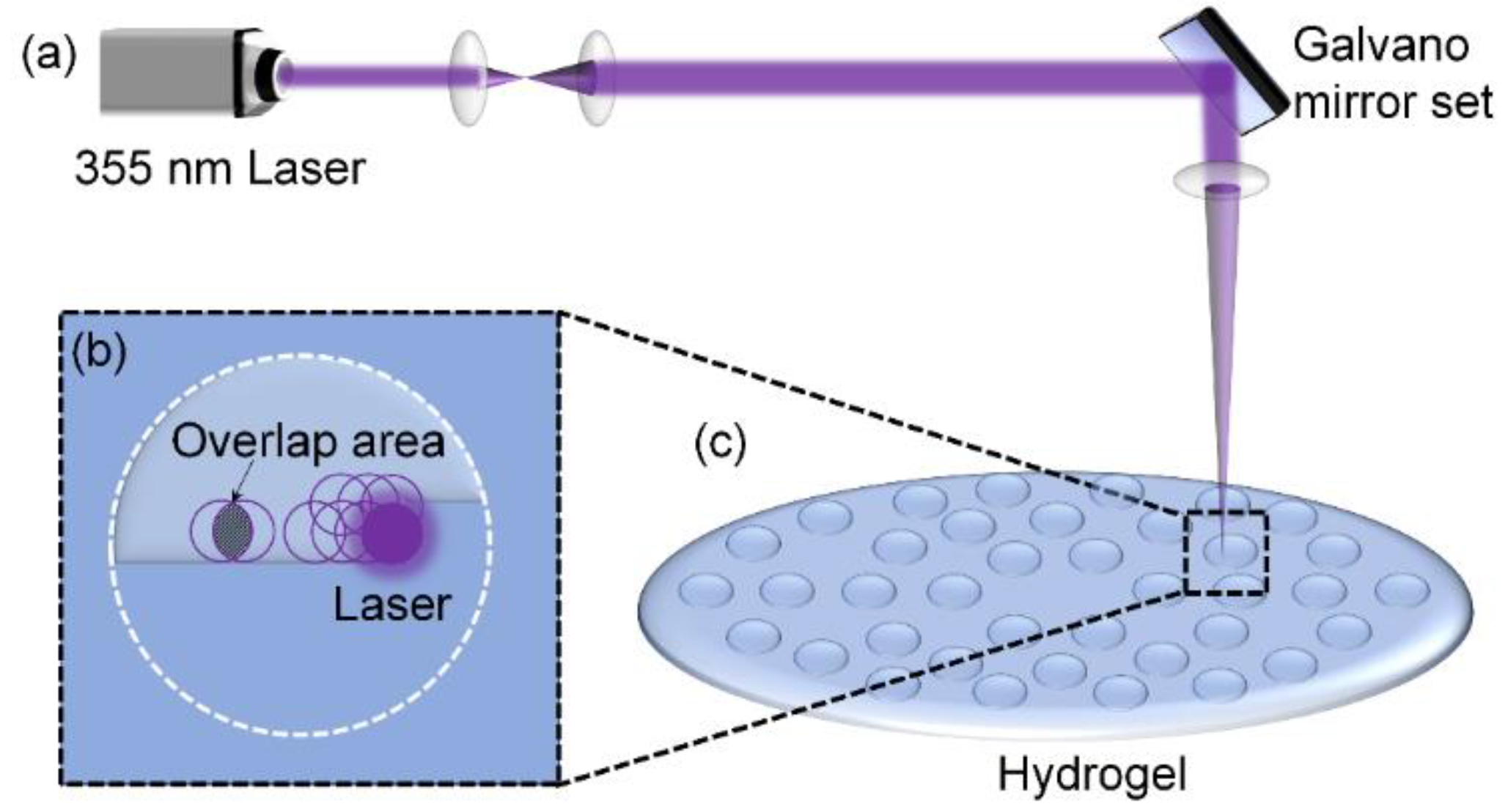
2.2. Laser Surface Texturing
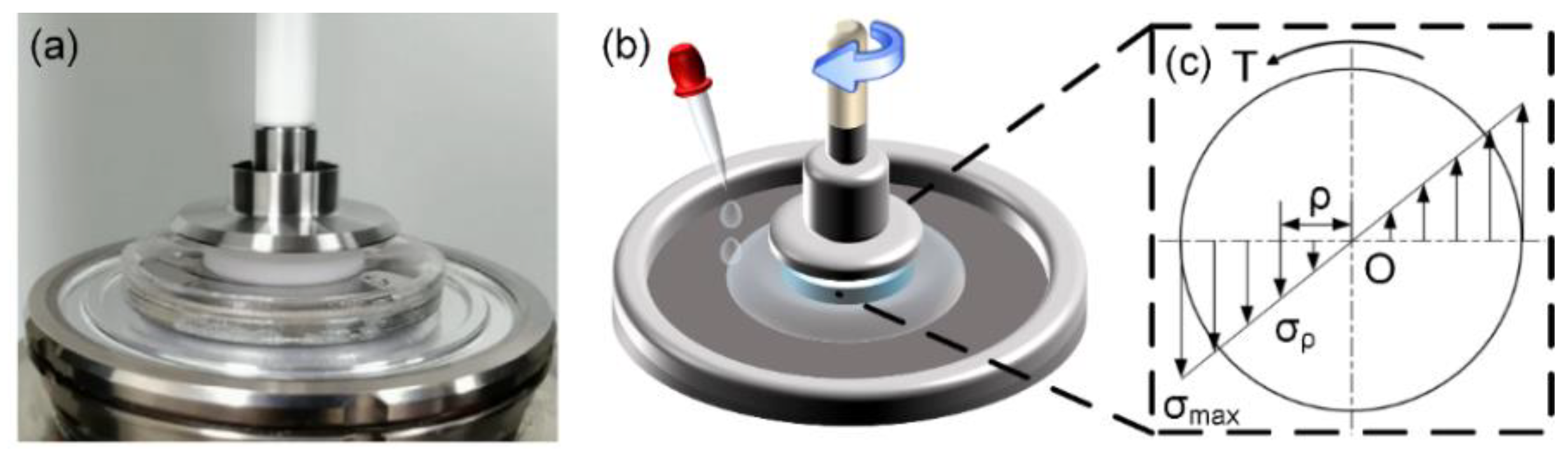
2.3. Characterization of Surface Tribological Properties
3. Results and Discussion
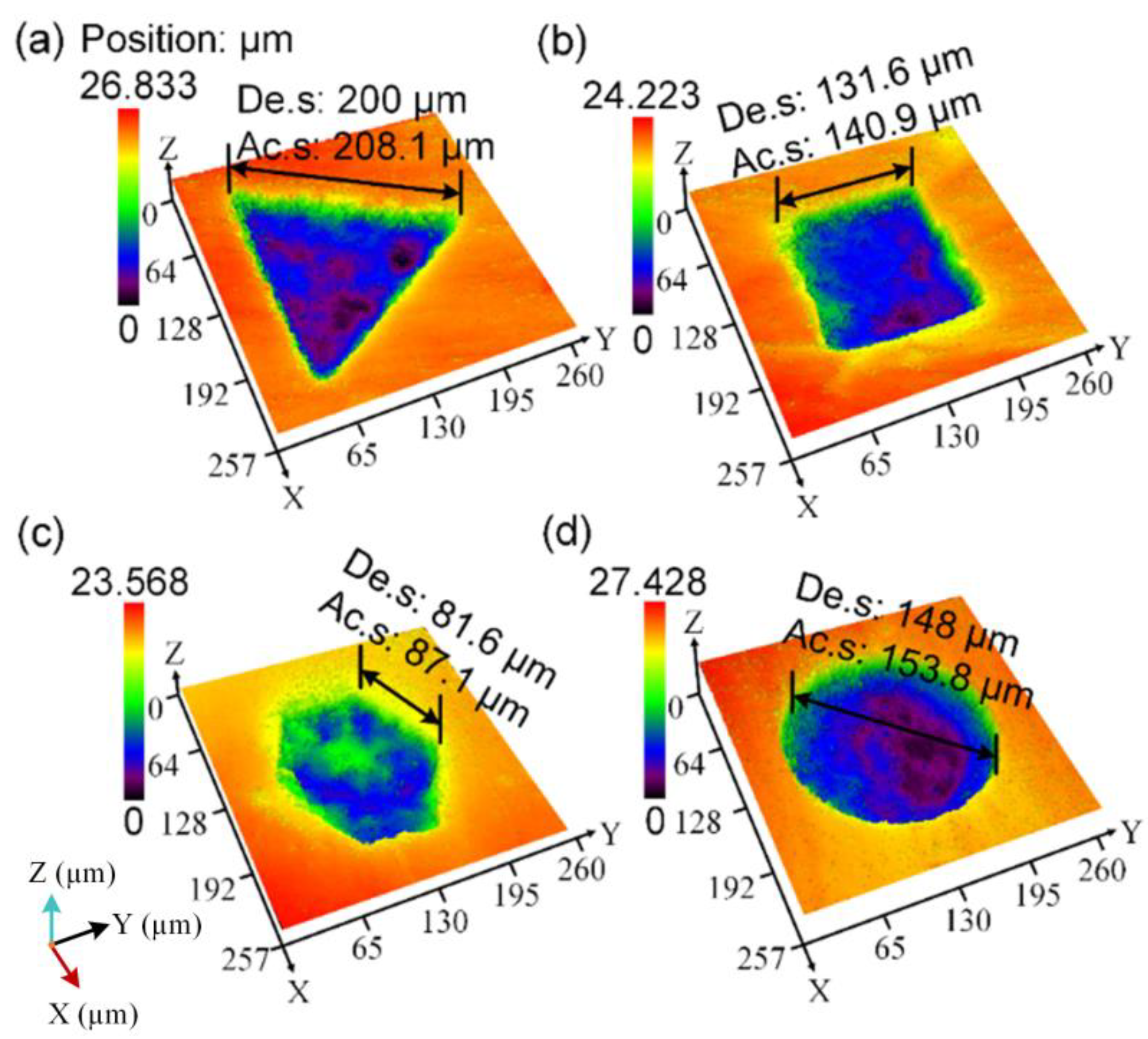
3.1. Topology of the Laser-Textured Hydrogel
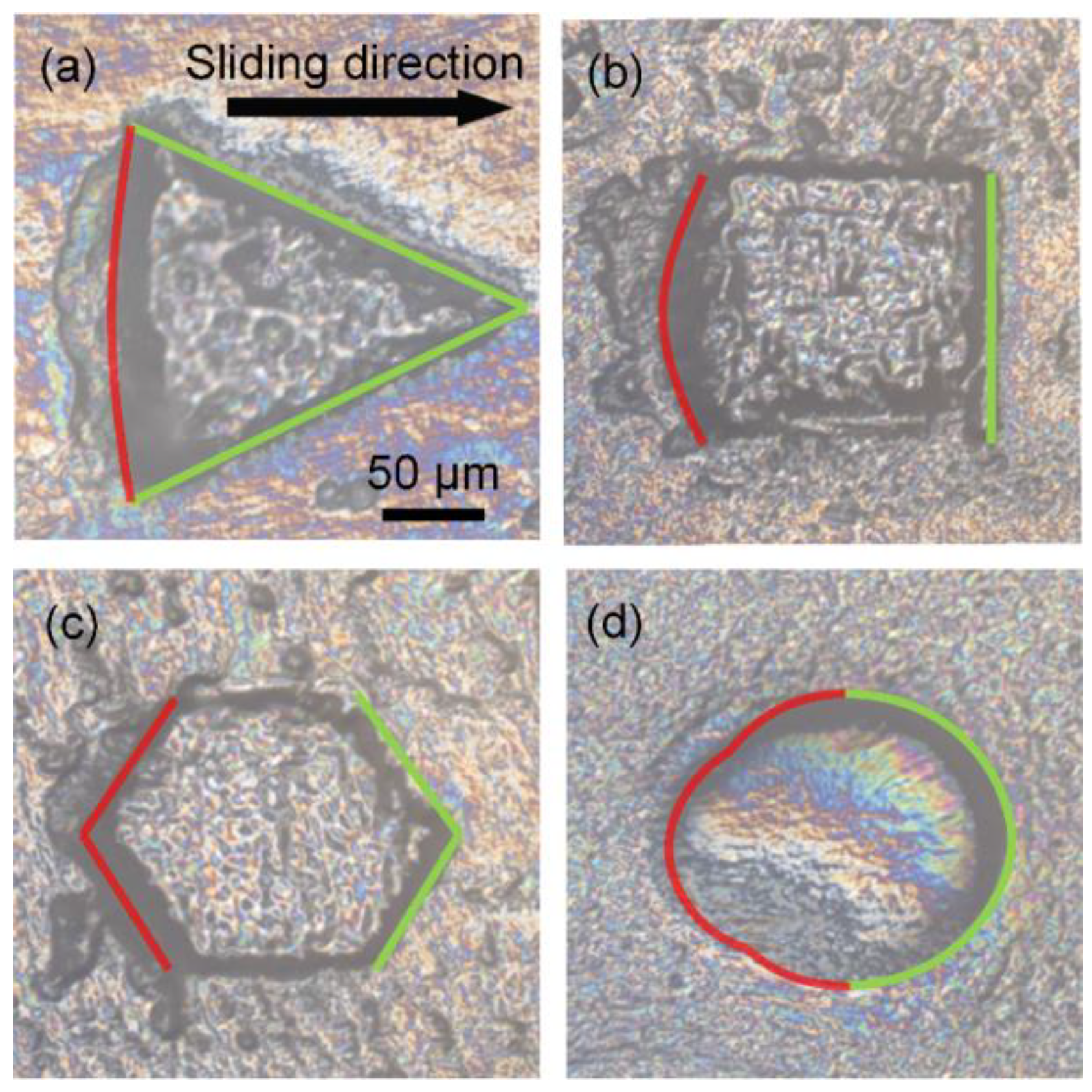
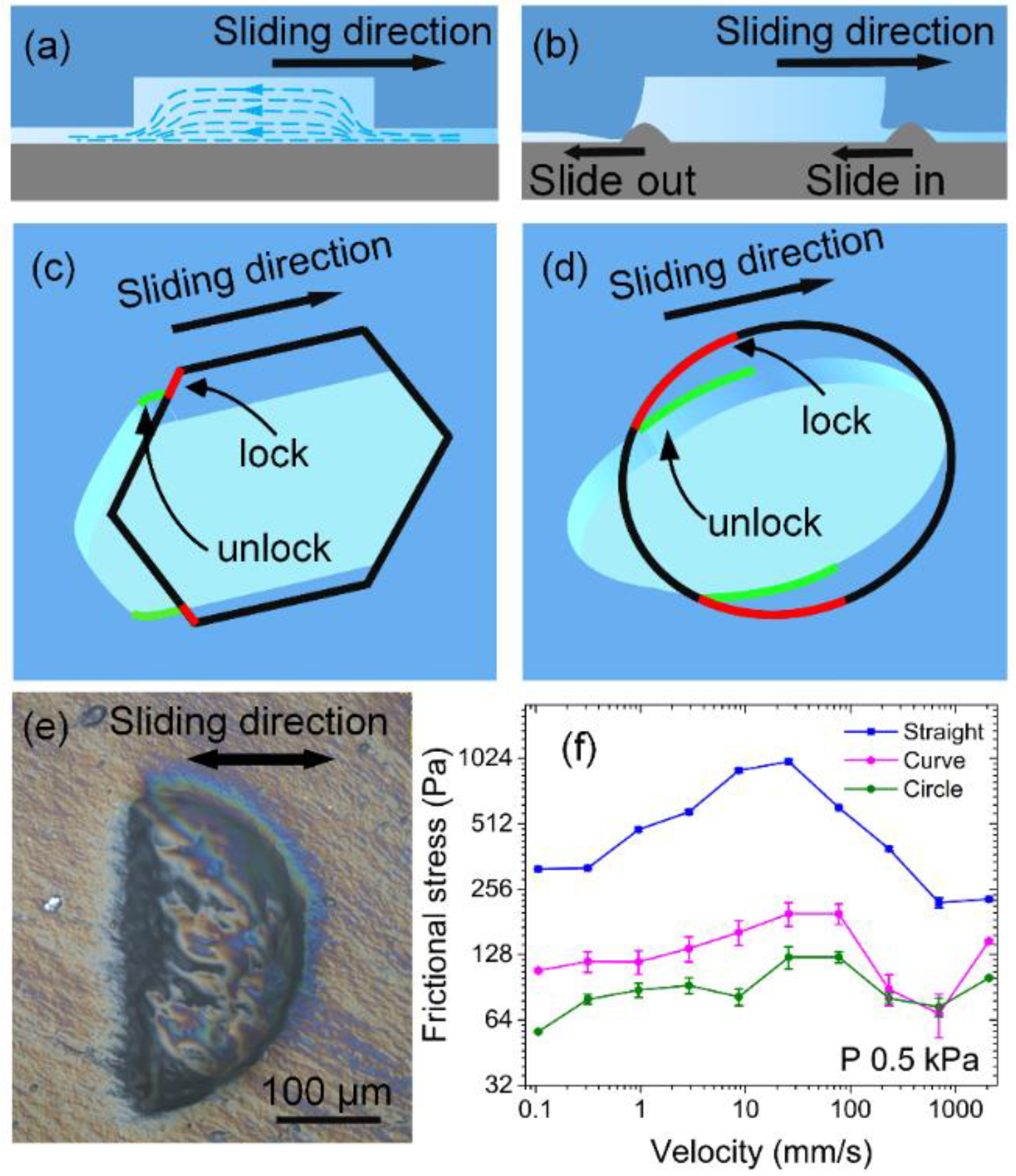
3.2. Micro-Pit Wear and a Model of the Wear Mechanism
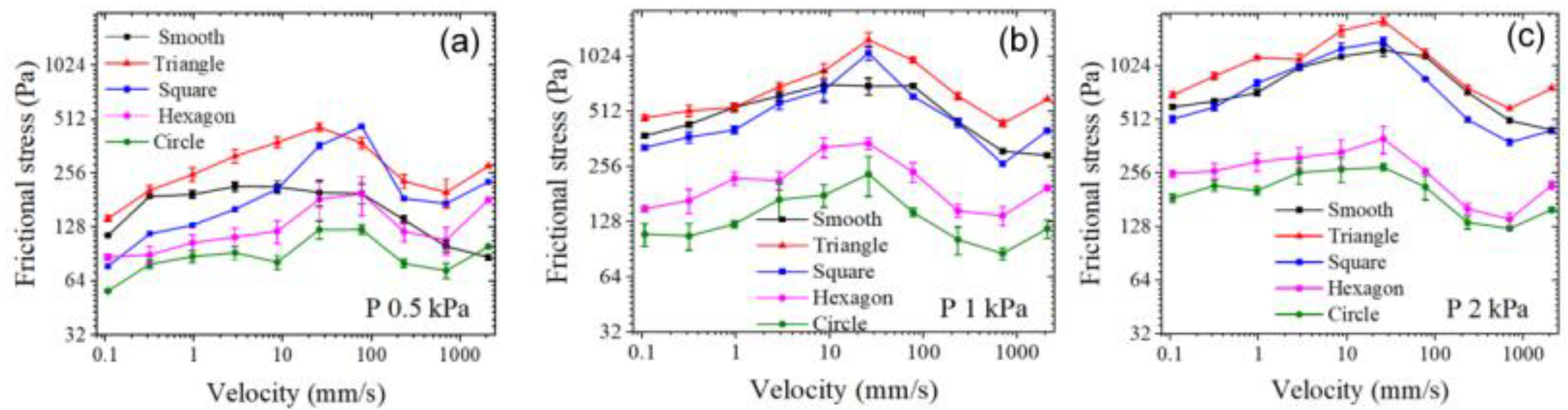
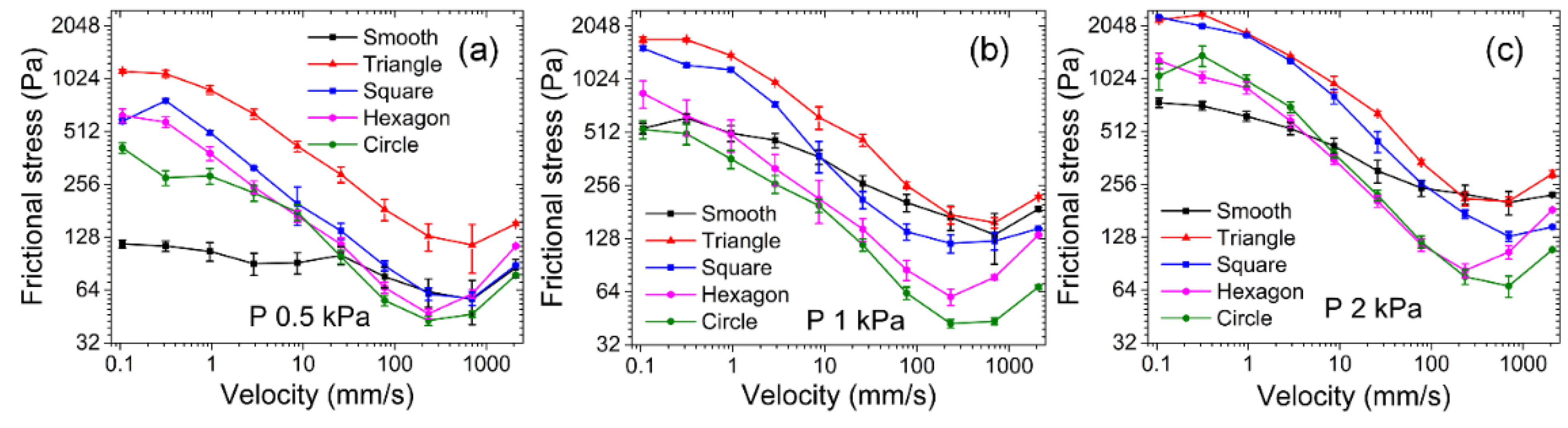
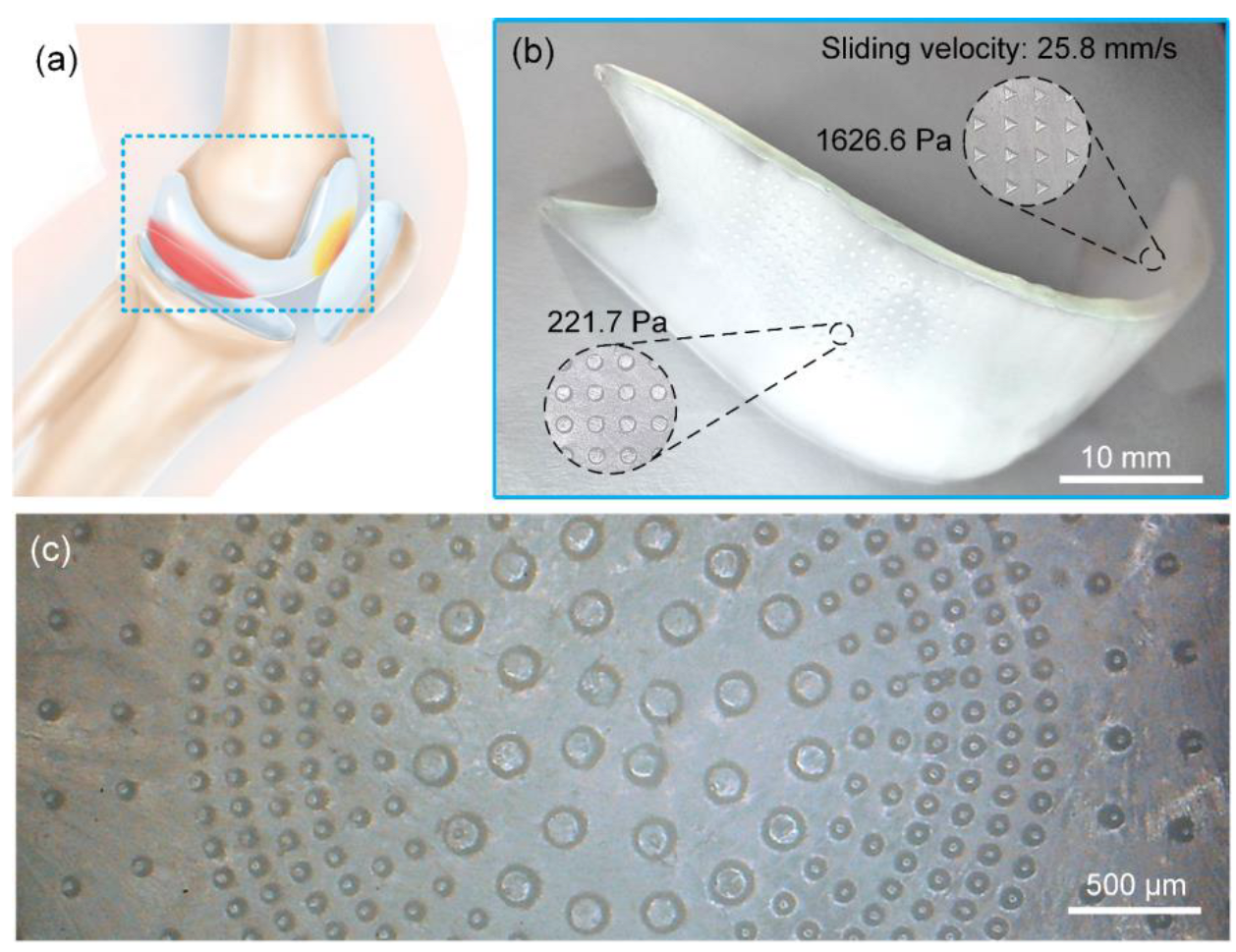
3.3. Modulation of Frictional Properties of Cartilaginous and Artificial Joints
3.4. Regulation of Frictional Properties between Cartilage Surfaces (Within an Experimental Joint)
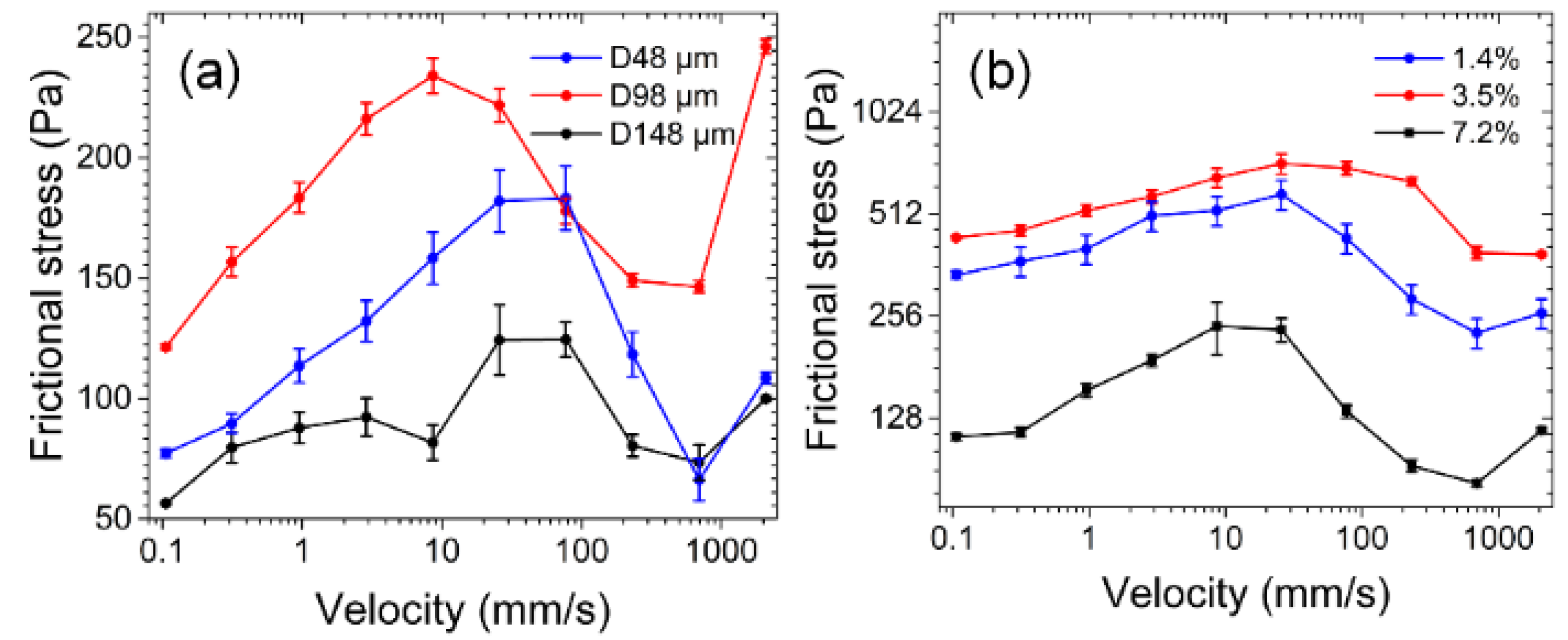
3.5. Customized Design of Cartilage Joints
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Rodrigues, S.P.; Carvalho, S.; Cavaleiro, A. Tribological performance of hybrid surfaces: Dimple-shaped anodized Al alloy surfaces coated with WS-CF sputtered thin films. Int. J. Adv. Manuf. Technol. 2020, 107, 3931–3941. [Google Scholar] [CrossRef]
- Michalak, R. Impact of geometry parameters of a slid-ing surface of a bearing on tribological characteristics of sliding bearings. Iran J. Sci. Technol. Trans. Mech. Eng. 2019, 43, 595–602. [Google Scholar] [CrossRef] [Green Version]
- Vladescu, S.-C.; Olver, A.V.; Pegg, I.G.; Reddyhoff, T. The effects of surface texture in reciprocating contacts—An experimental study. Tribol. Int. 2015, 82, 28–42. [Google Scholar] [CrossRef] [Green Version]
- Sperka, P.; Krupka, I.; Hartl, M. The effect of surface grooves on film breakdowns in point contacts. Tribol. Int. 2016, 102, 249–256. [Google Scholar] [CrossRef] [Green Version]
- Lu, L.; Zhang, Z.; Guan, Y.; Zheng, H. Comparison of the effect of typical patterns on friction and wear properties of chromium alloy prepared by laser surface texturing. Opt. Laser Technol. 2018, 106, 272–279. [Google Scholar] [CrossRef]
- Li, Z.; Bai, J.; Tang, J. Micro-EDM method to fabricate three-dimensional surface textures used as SERS-active substrate. Appl. Surf. Sci. 2018, 458, 810–818. [Google Scholar] [CrossRef]
- Sun, K.; Yang, H.; Xue, W.; He, A.; Zhu, D.; Liu, W.; Adeyemi, K.; Cao, Y. Anti-biofouling superhydrophobic surface fabricated by picosecond laser texturing of stainless steel. Appl. Surf. Sci. 2018, 436, 263–267. [Google Scholar] [CrossRef]
- Jiang, Q.; Li, W.; Mu, J.; Sun, W.; Gu, C. On the fabrication and mechanism of pinecone surface structures. Microelectron. Eng. 2014, 129, 58–64. [Google Scholar] [CrossRef]
- Pan, Y.; Hou, Z.; Qu, N. Improvement in accuracy of micro-dimple arrays prepared by micro-electrochemical machining with high-pressure hydrostatic electrolyte. Int. J. Adv. Manuf. Technol. 2019, 100, 1767–1777. [Google Scholar] [CrossRef]
- Zheng, K.; Liao, W.; Dong, Q.; Sun, L. Friction and wear on titanium alloy surface machined by ultrasonic vibration assisted milling. J. Brazil Soc. Mech. Sci. Eng. 2018, 40, 411. [Google Scholar] [CrossRef]
- Wang, X.; Zheng, H. Picosecond laser micro-drilling, engraving and surface texturing of tungsten carbide. J. Laser Appl. 2018, 30, 032203. [Google Scholar] [CrossRef]
- Zhang, S.; Zeng, X.; Matthews, D.T.A.; Igartua, A. Selection of micro-fabrication techniques on stainless steel sheet for skin friction. Friction 2016, 4, 89–104. [Google Scholar] [CrossRef] [Green Version]
- Pacella, M.; Nekouie, V.; Badiee, A. Surface engineering of ultra-hard polycrystalline structures using a nanosecond Yb fibre laser: Effect of process parameters on microstructure, hardness and surface finish. J. Mater. Process. Tech. 2019, 266, 311–328. [Google Scholar] [CrossRef]
- Gong, J.P.; Higa, M.; Iwasaki, Y.; Katsuyama, Y.; Osada, Y. Friction of Gels. J. Phys. Chem. B 1997, 28, 5487–5489. [Google Scholar] [CrossRef]
- Yuk, H.; Lin, S.; Ma, C.; Takaffoli, M.; Fang, N.X.; Zhao, X. Hydraulic hydrogel actuators and robots optically and sonically camouflaged in water. Nat. Commun. 2017, 81, 14230. [Google Scholar] [CrossRef] [Green Version]
- Rus, D.; Tolley, M.T. Design, fabrication and control of origami robots. Nat. Rev. Mater. 2018, 36, 101–112. [Google Scholar] [CrossRef]
- Kim, S.; Laschi, C.; Trimmer, B. Soft robotics: A bioinspired evolution in robotics. Trends Biotechnol. 2013, 5, 287–294. [Google Scholar] [CrossRef]
- Nakashima, K.; Sawae, Y.; Murakami, T. Influence of protein conformation on frictional properties of poly (vinyl alcohol) hydrogel for artificial cartilage. Tribol. Lett. 2007, 2, 145–151. [Google Scholar] [CrossRef]
- Gong, J.P. Friction and lubrication of hydrogels—Its richness and complexity. Soft Matter 2006, 7, 544–552. [Google Scholar] [CrossRef]
- Gong, J.P.; Osada, Y. Gel friction: A model based on surface repulsion and adsorption. J. Chem. Phys 1998, 109, 8062–8068. [Google Scholar] [CrossRef]
- Gong, J.P.; Osada, Y. Surface friction of polymer gels. Prog. Polym. Sci 2002, 1, 3–38. [Google Scholar] [CrossRef]
- Urueña, J.M.; Pitenis, A.A.; Nixon, R.M.; Schulze, K.D.; Angelini, T.E.; Sawyer, W.G. Mesh size control of polymer fluctuation lubrication in gemini hydrogels. Biotribology 2015, 1, 24–29. [Google Scholar] [CrossRef]
- Xi, Y.W.; Sharma, P.K.; Kaper, H.J.; Choi, C.H. Tribological, Properties of Micropored, Poly (2-hydroxyethyl methacrylate) Hydrogels in a Biomimetic, Aqueous Environment. ACS Appl. Mater. Inter. 2021, 35, 41473–41484. [Google Scholar] [CrossRef] [PubMed]
- Liu, L.; Zhu, M.; Xu, X.; Li, X.; Ma, Z.; Jiang, Z.; Pich, A.; Wang, H.; Song, P. Dynamic nanoconfinement enabled highly stretchable and supratough polymeric materials with desirable healability and biocompatibility. Adv. Mater. 2021, 33, 2105829. [Google Scholar] [CrossRef] [PubMed]
- Karimi, A.; Navidbakhsh, M. Material properties in unconfined compression of gelatin hydrogel for skin tissue engineering applications. Biomed. Tech. 2014, 59, 479–486. [Google Scholar] [CrossRef]
- Gong, J.P.; Iwasaki, Y.; Osada, Y. Friction of Gels. 3. Friction on Solid, Surfaces. J. Phys. Chem B 1999, 29, 6001–6006. [Google Scholar] [CrossRef]
- Weon, B.M.; Je, J.H.; Hwu, Y.; Margaritondo, G. Decreased surface tension of water by hard-X-ray irradiation. Phys. Rev. Lett. 2008, 100, 217403. [Google Scholar] [CrossRef] [Green Version]
- Hodge, W.A.; Harman, M.K.; Banks, S.A. Patterns of knee osteoarthritis in Arabian and American knees. J. Arthroplast. 2009, 24, 448–453. [Google Scholar] [CrossRef]
- Shrier, I. Muscle dysfunction versus wear and tear as a cause of exercise related osteoarthritis: An epidemiological update. Brit. J. Sport. Med. 2004, 5, 526–535. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Laser Parameter | Symbol (Units) | Values |
|---|---|---|
| Average power | P(W) | 1.88 |
| Wavelength | λ(nm) | 355 |
| Pulse duration | τ(ns) | 20 |
| Repetition rate | F(kHz) | 50 |
| Spot diameter | φ(μm) | 20 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, Z.; Chu, Y.; Hou, Z.; Zhou, X.; Cao, Y. Modification of Frictional Properties of Hydrogel Surface via Laser Ablated Topographical Micro-Textures. Nanomaterials 2022, 12, 4103. https://doi.org/10.3390/nano12224103
Zhou Z, Chu Y, Hou Z, Zhou X, Cao Y. Modification of Frictional Properties of Hydrogel Surface via Laser Ablated Topographical Micro-Textures. Nanomaterials. 2022; 12(22):4103. https://doi.org/10.3390/nano12224103
Chicago/Turabian StyleZhou, Zhuangzhuang, Yihang Chu, Zhishan Hou, Xiaopeng Zhou, and Yu Cao. 2022. "Modification of Frictional Properties of Hydrogel Surface via Laser Ablated Topographical Micro-Textures" Nanomaterials 12, no. 22: 4103. https://doi.org/10.3390/nano12224103