
Application of Orthogonal Functions to Equivalent Linearization Method for MDOF Duffing–Van der Pol Systems under Nonstationary Random Excitations

Abstract
:1. Introduction
2. Review of Orthogonal Functions
- (a)
- For a real constant k, we havewhere is a constant vector with all entries being one.
- (b)
- For addition and subtraction of functions , , we have:This relation can be derived directly from the linearity of the BP operator.
- (c)
- For integration of a function , we havewhere is a conventional integration operational matrix defined as
- (d)
- For convolution integral of functions , , we have:where and are the convolution operational matrices defined in Equations (11) and (12).
- (e)
- For multiple integrals, we have the following rule:
3. The Equivalent Linearization Technique Based on Orthogonal Functions
3.1. SDOF System
- Assign initial estimations of and in order to obtain the mean square response of displacement and velocity (, ).
- Substitute the obtained values into Equations (17) and (18) to obtain new estimations for and .
- In order to find new estimation for the mean square response, substitute the new values of and into Equation (20) and then Equations (22) and (23).
- Use the obtained and values and return to step (2).
- Repeat steps (2), (3) and (4) until the results satisfy the following convergence criterion:where was used in the current study.
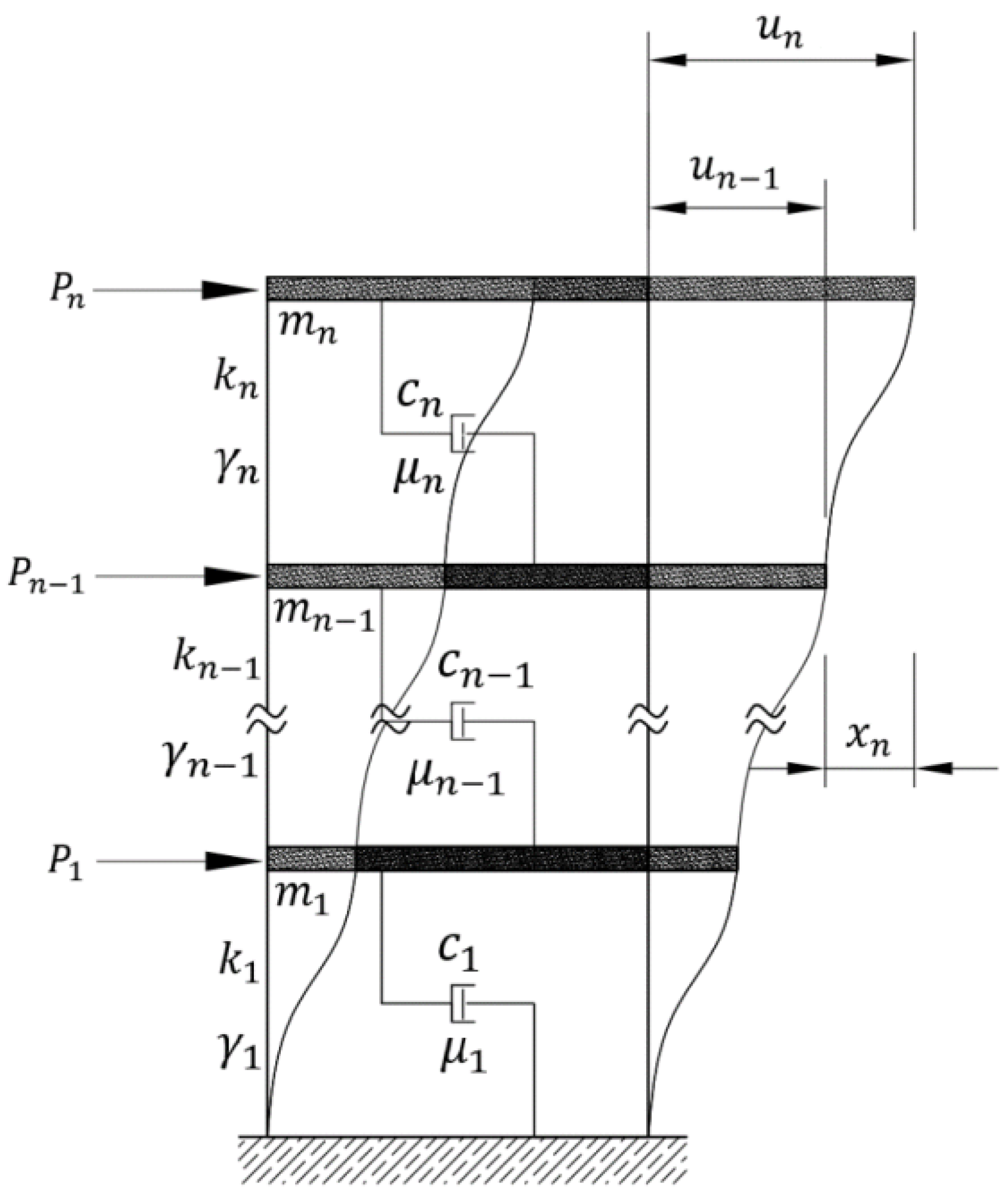
3.2. MDOF System
4. Numerical Examples
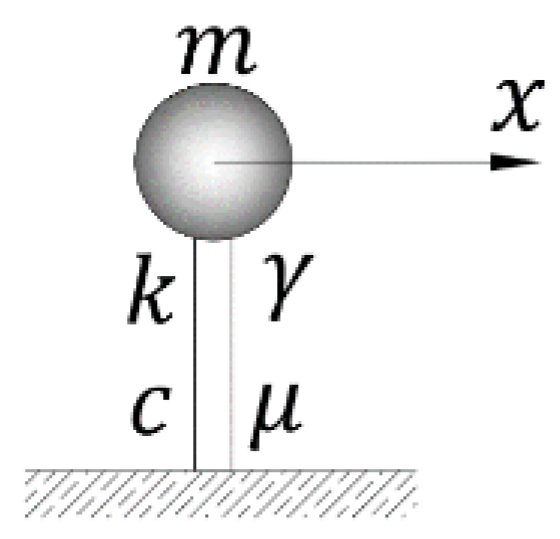
4.1. SDOF Duffing–Van der Pol Oscillator
4.1.1. Stationary Excitation
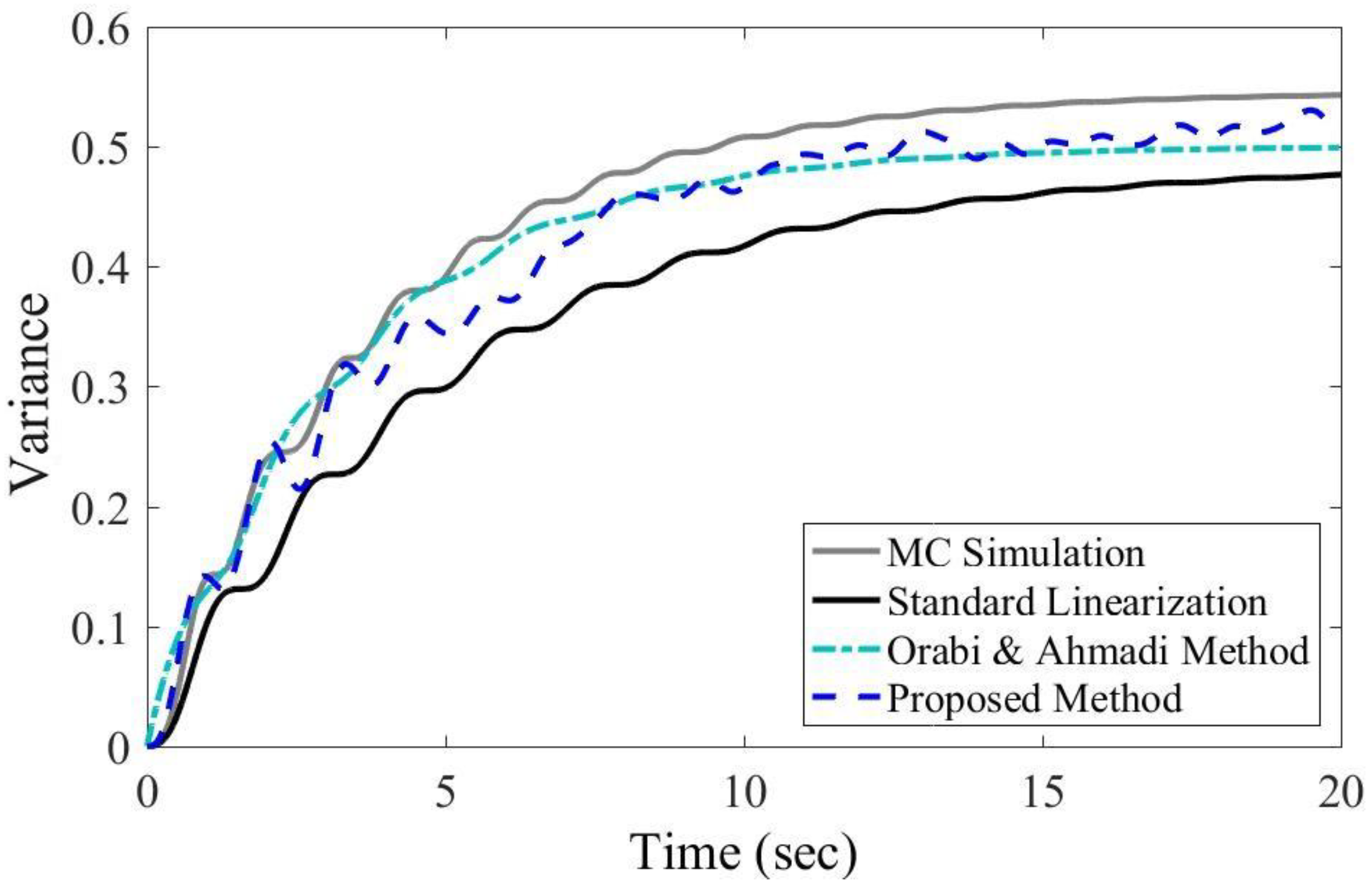
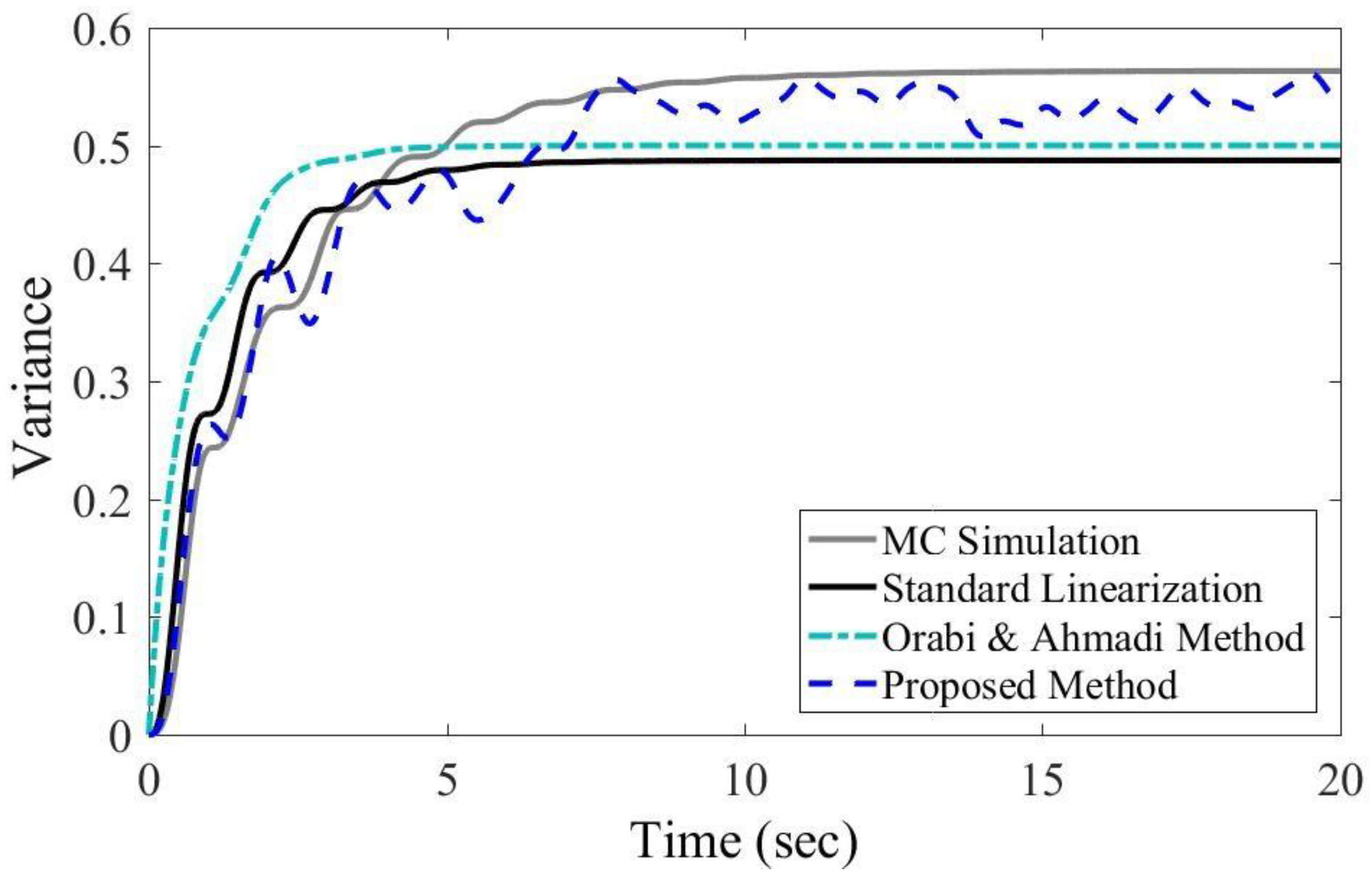
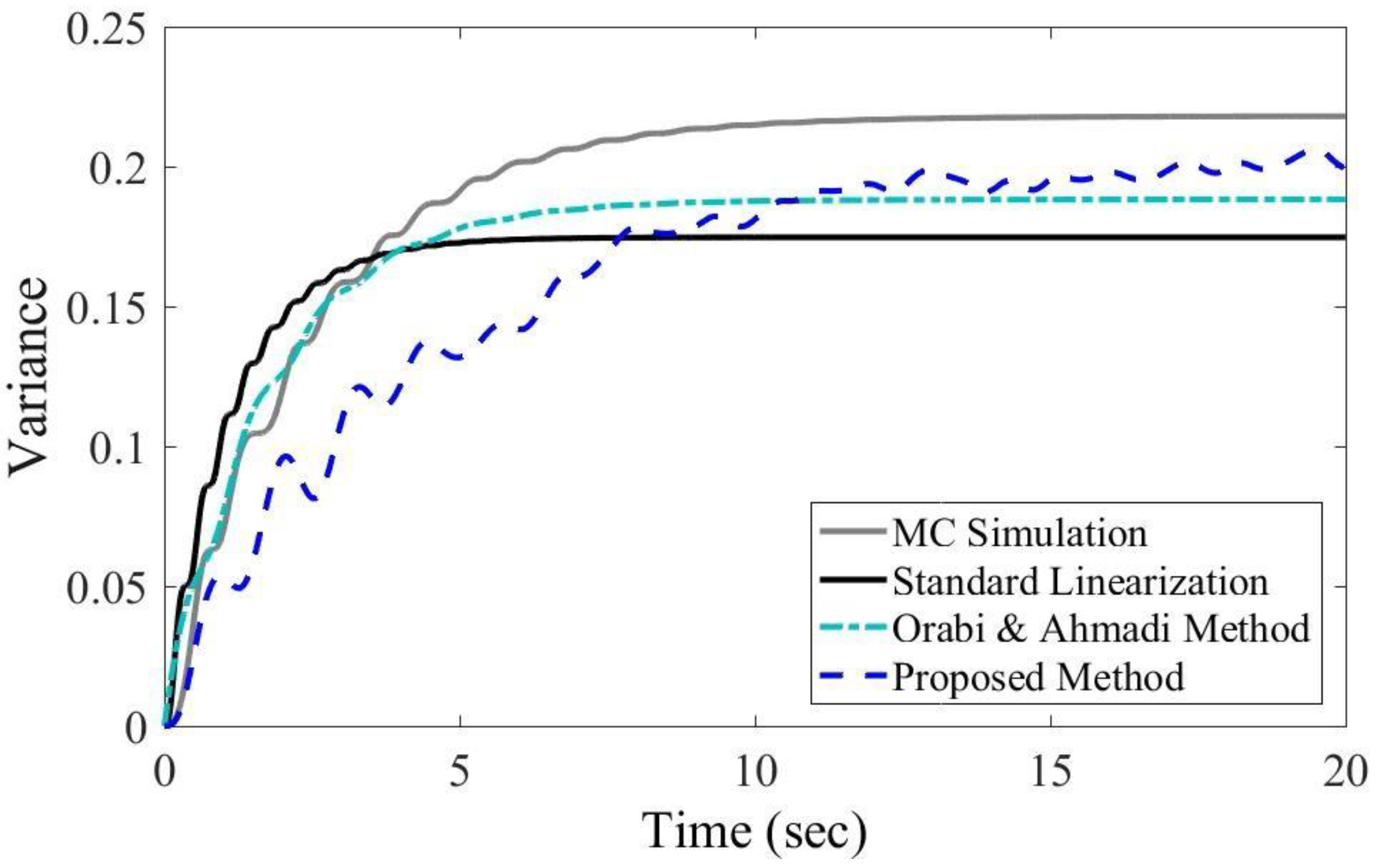
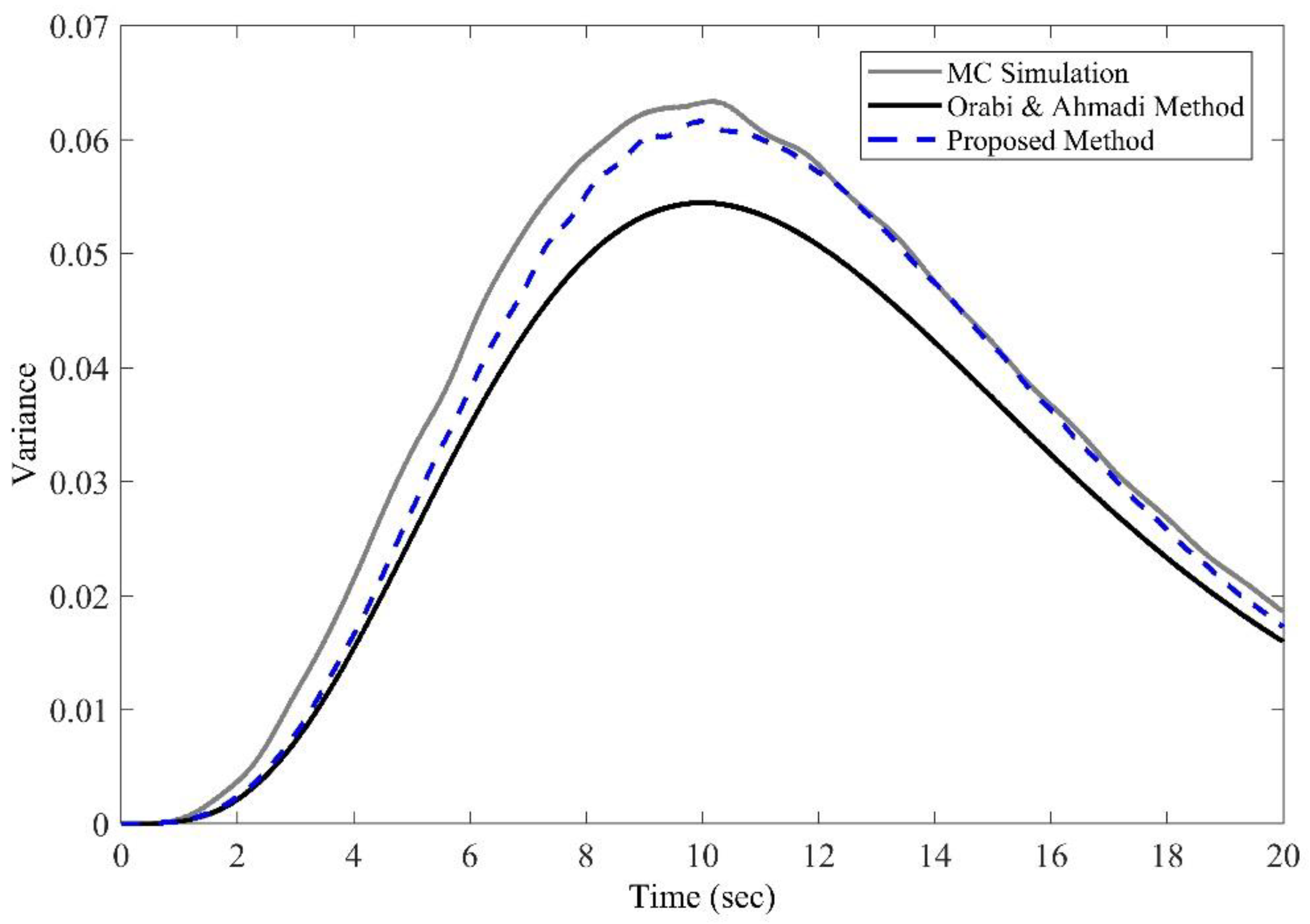
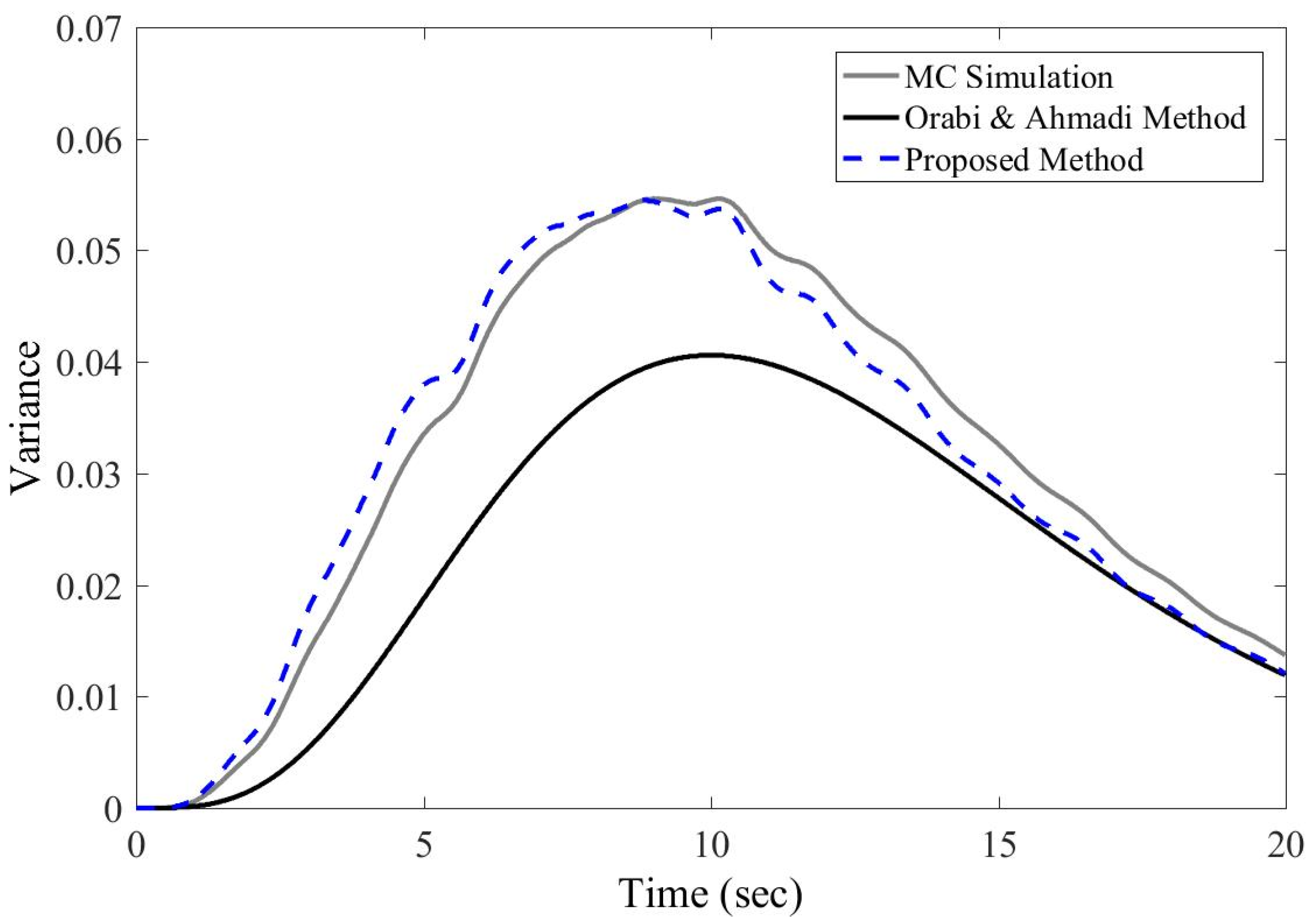
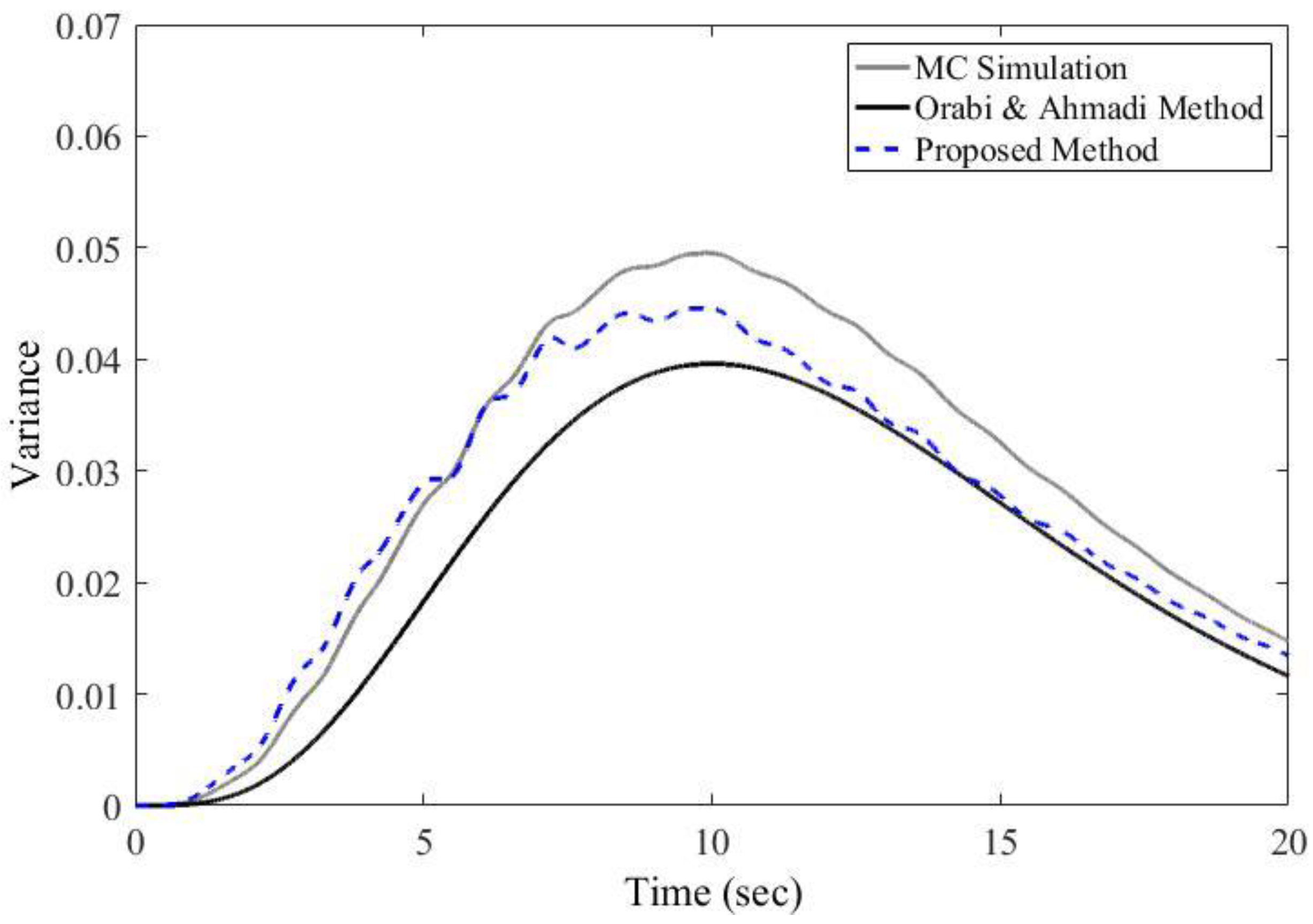
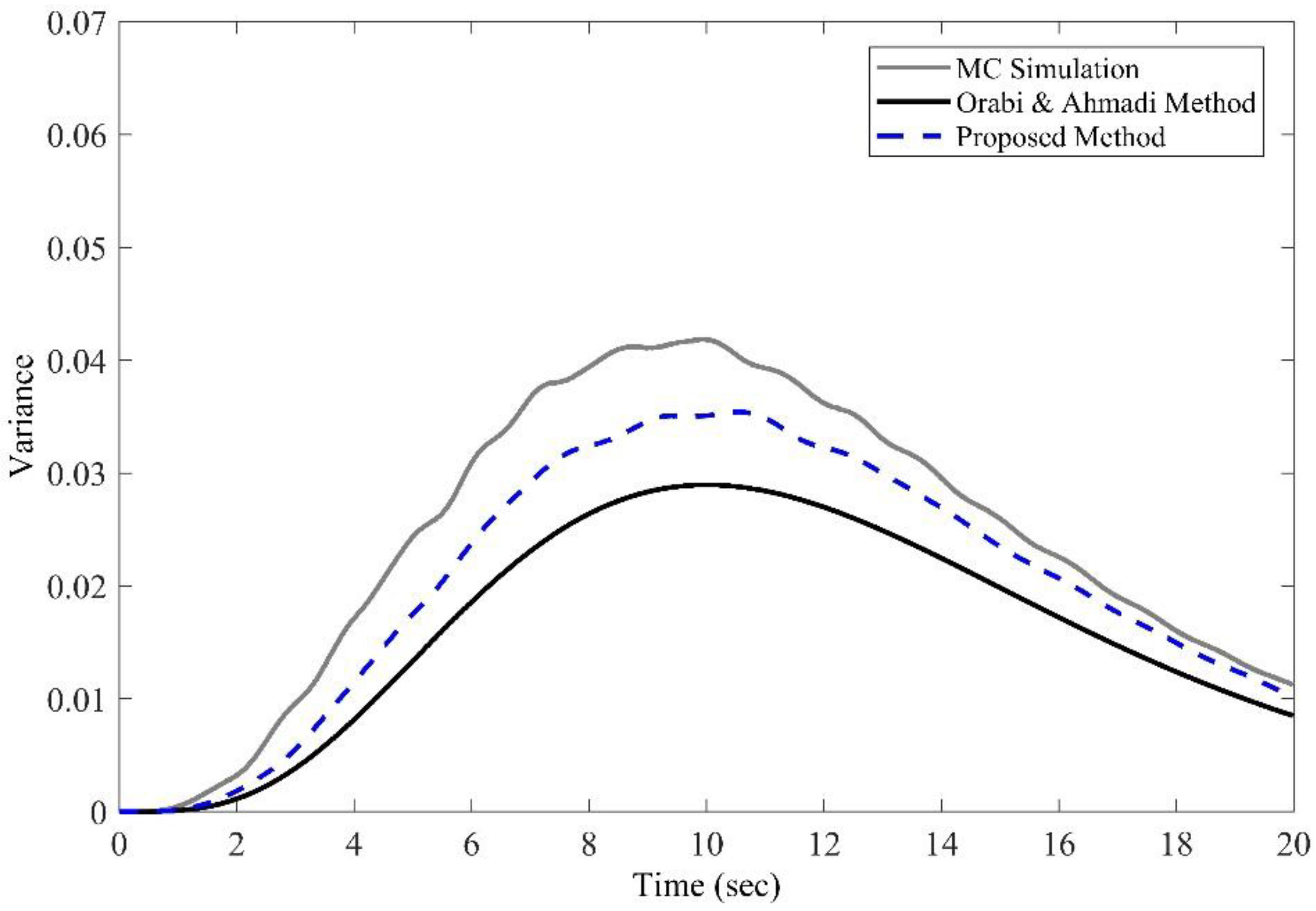
4.1.2. Nonstationary Excitation
- (a)
- Nonwhite noise forcing function
- (b)
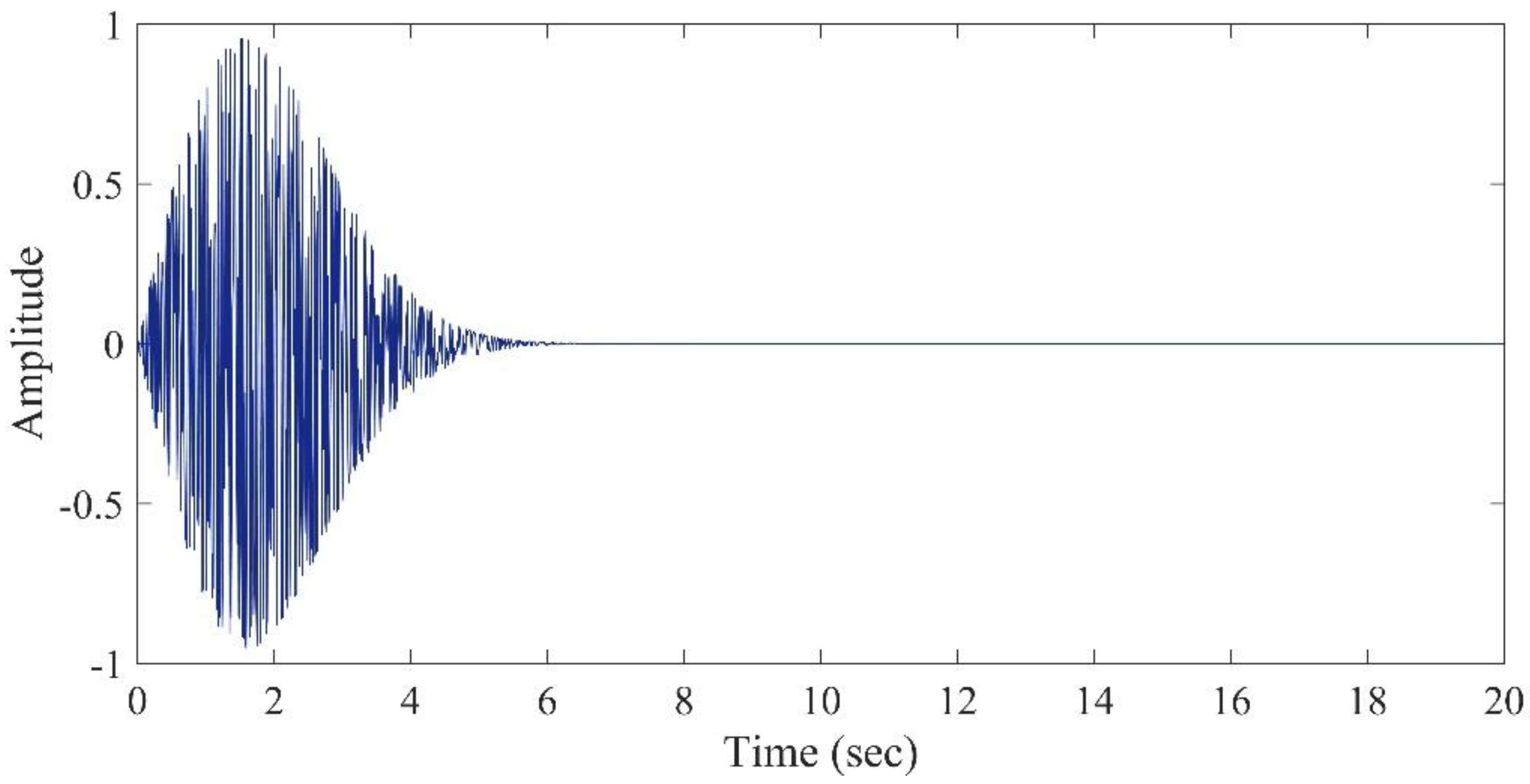
- El Centro (1940) earthquake record with
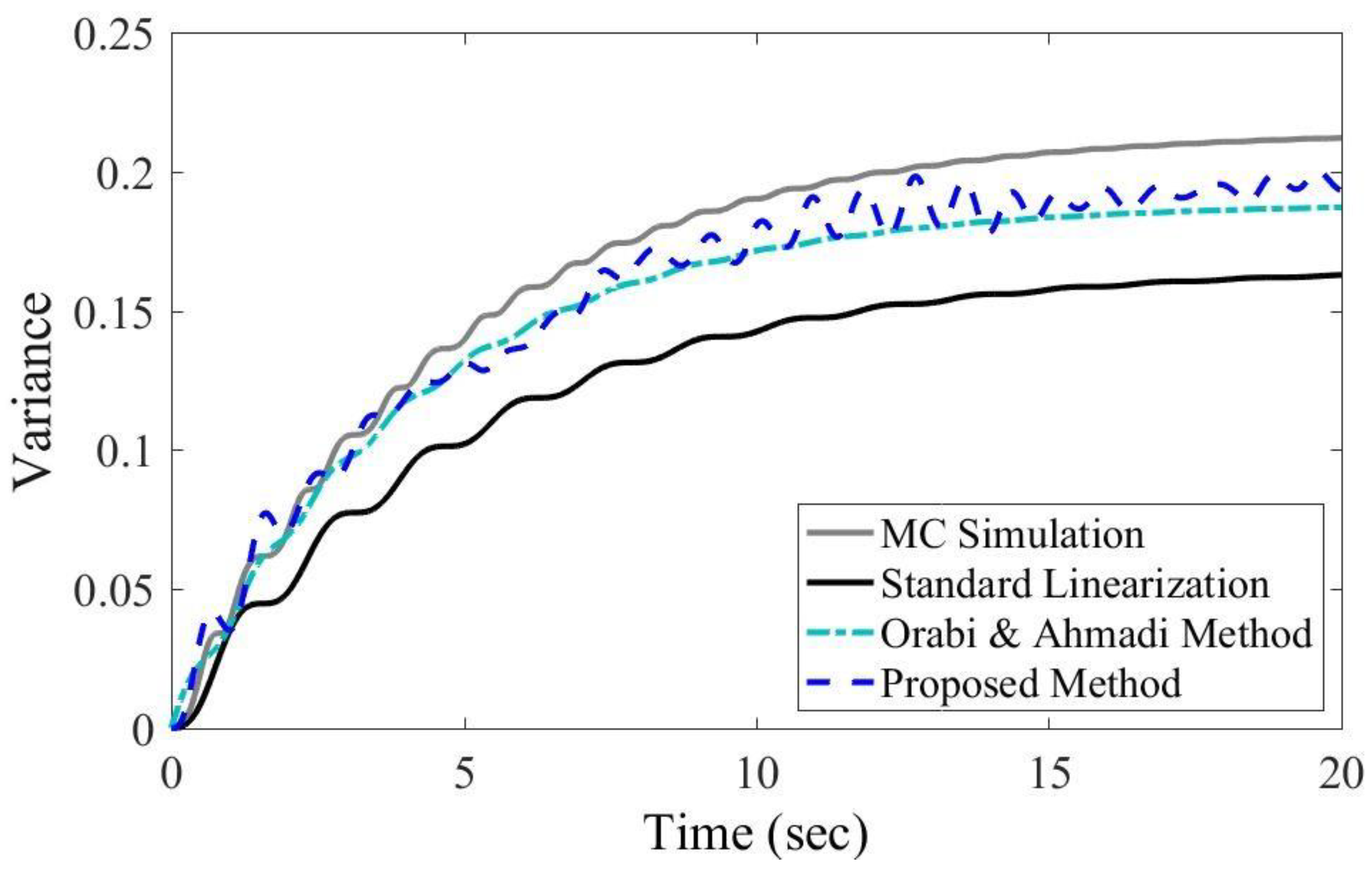
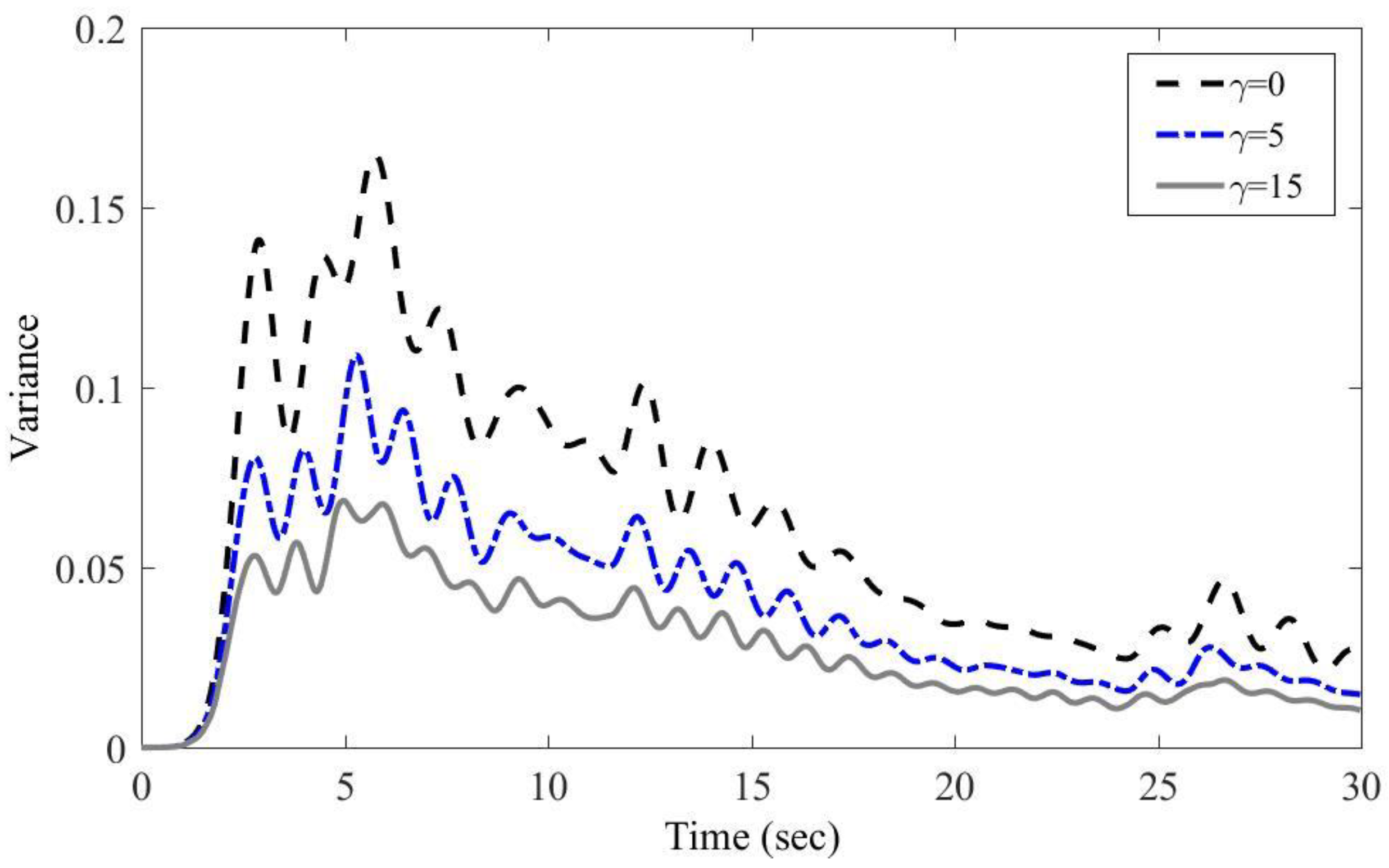
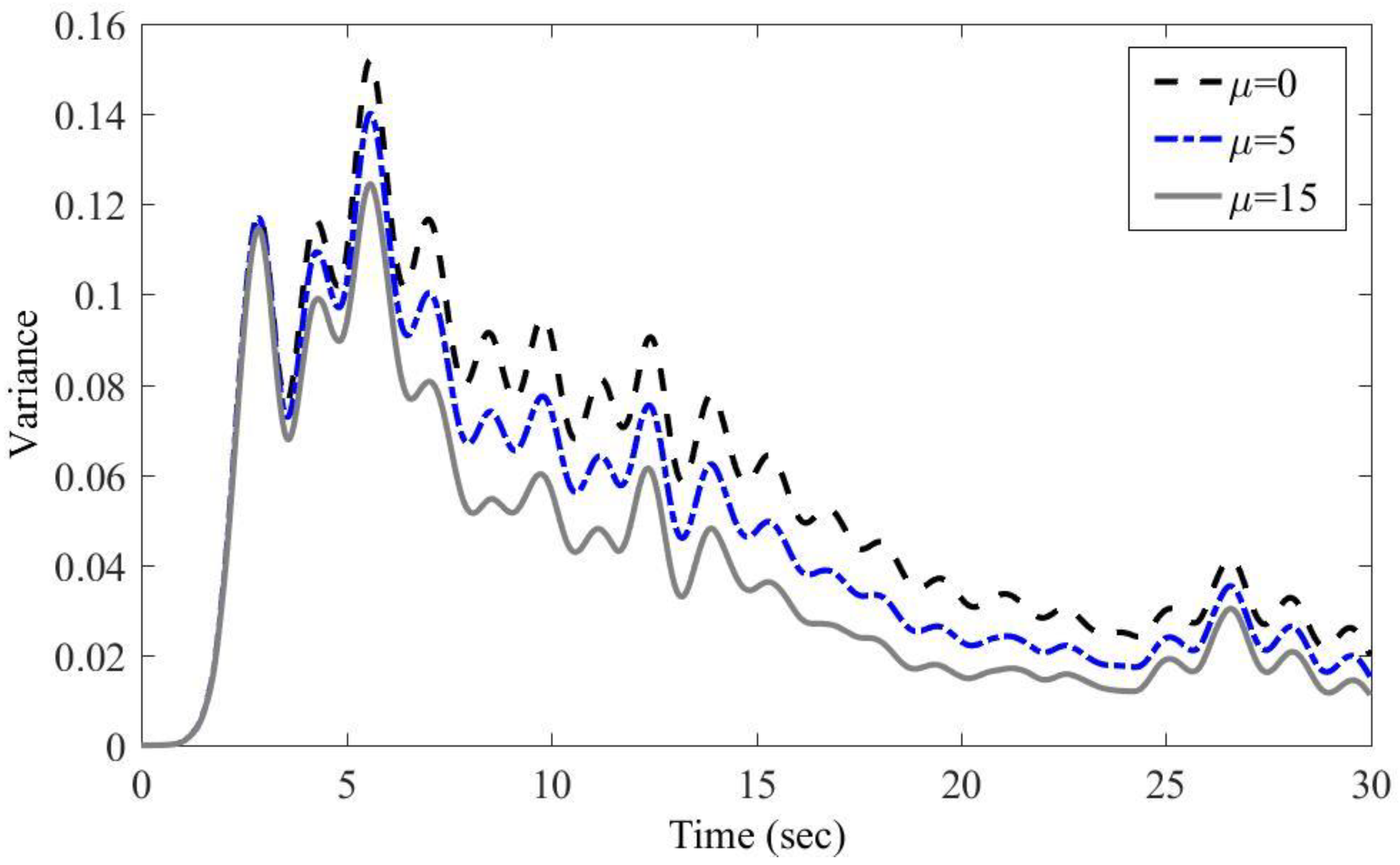
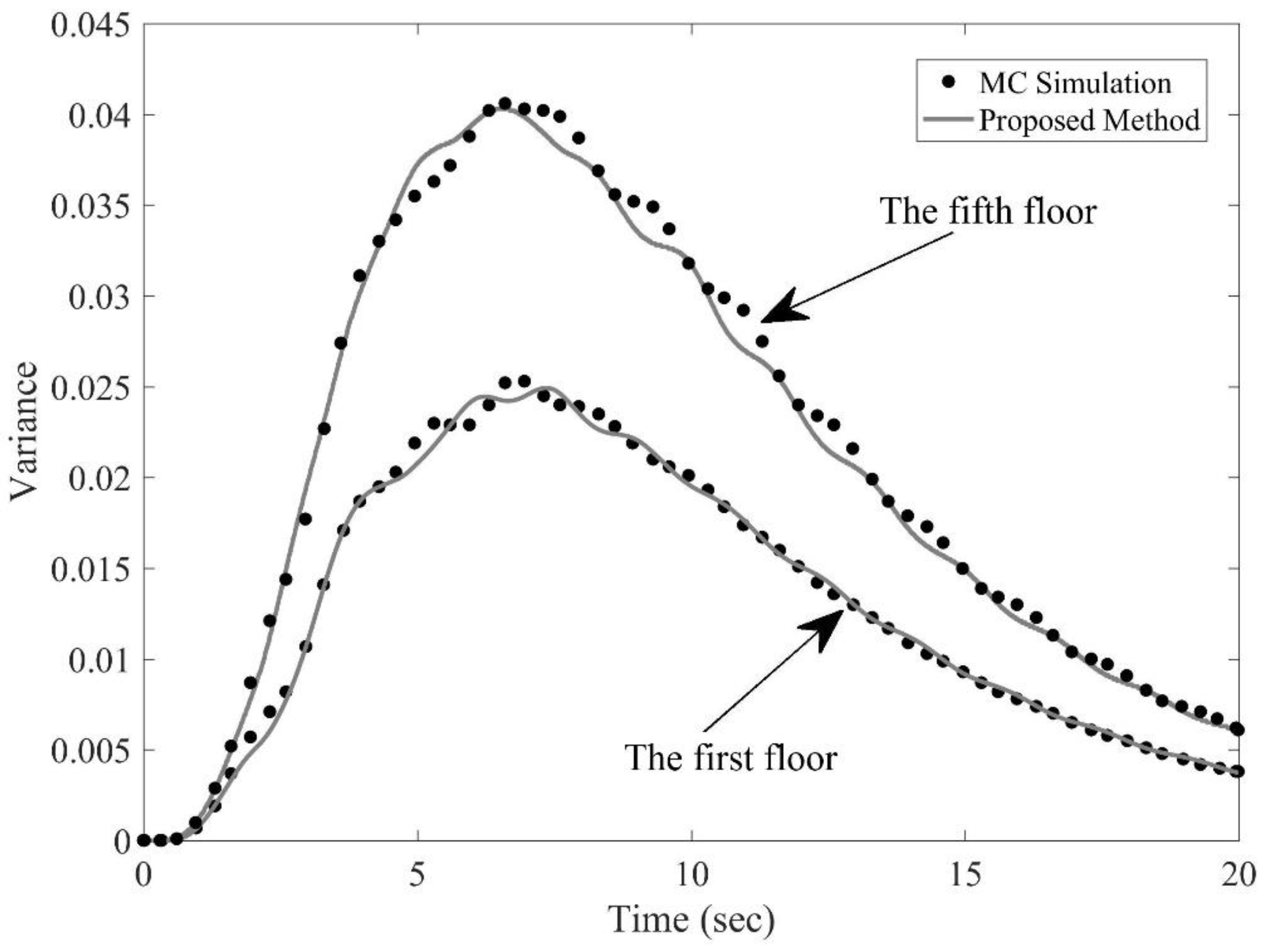
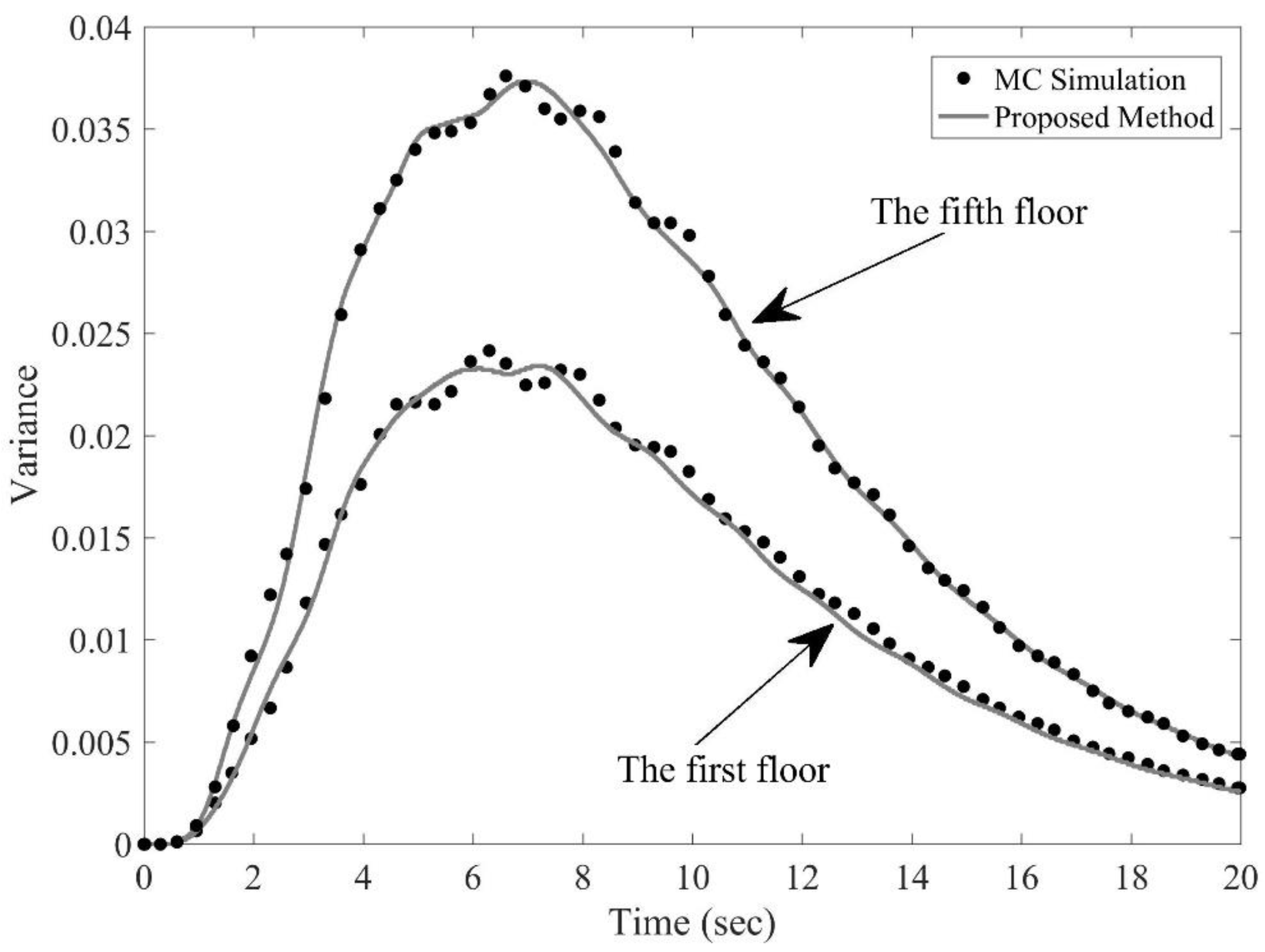
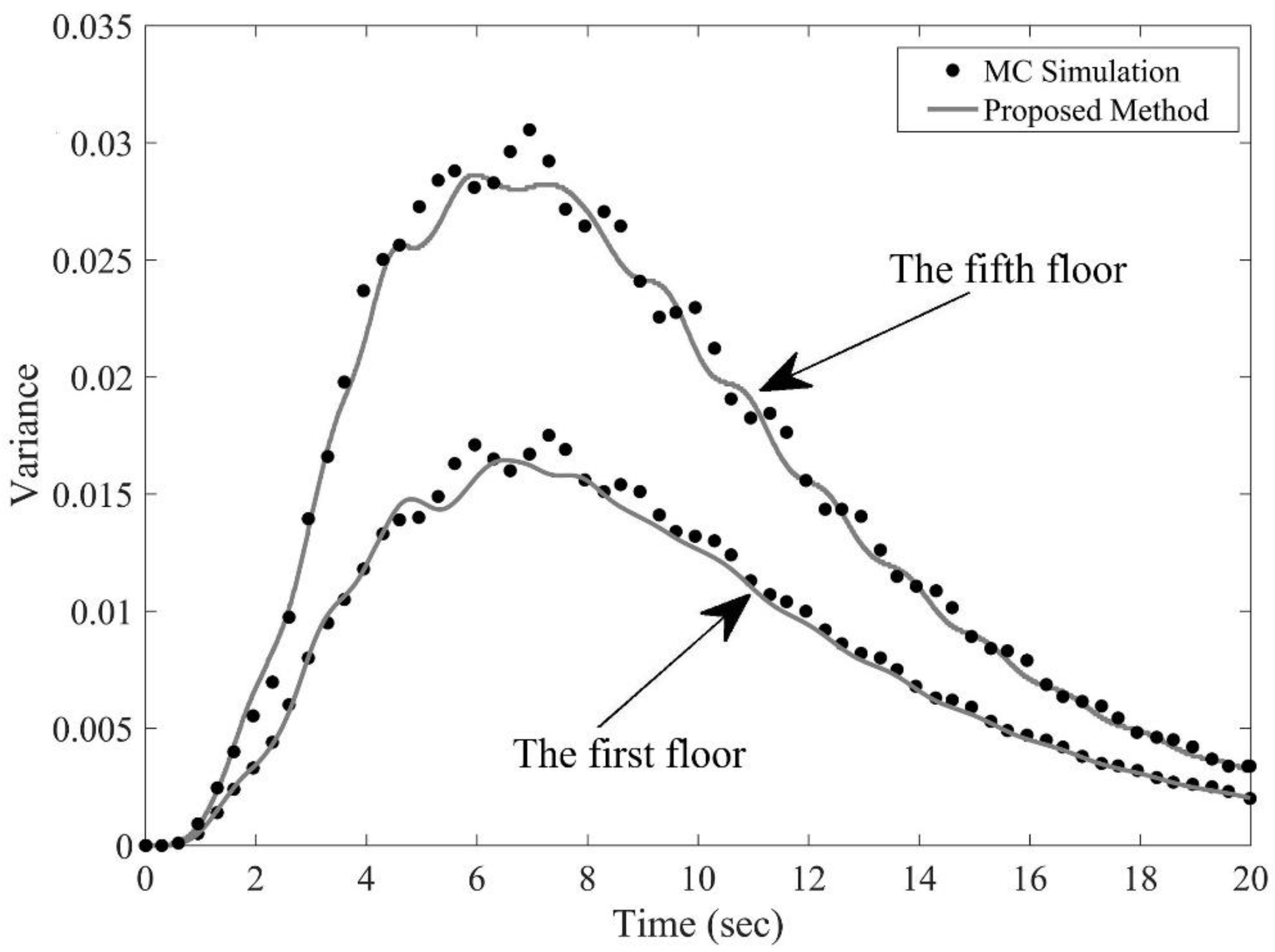
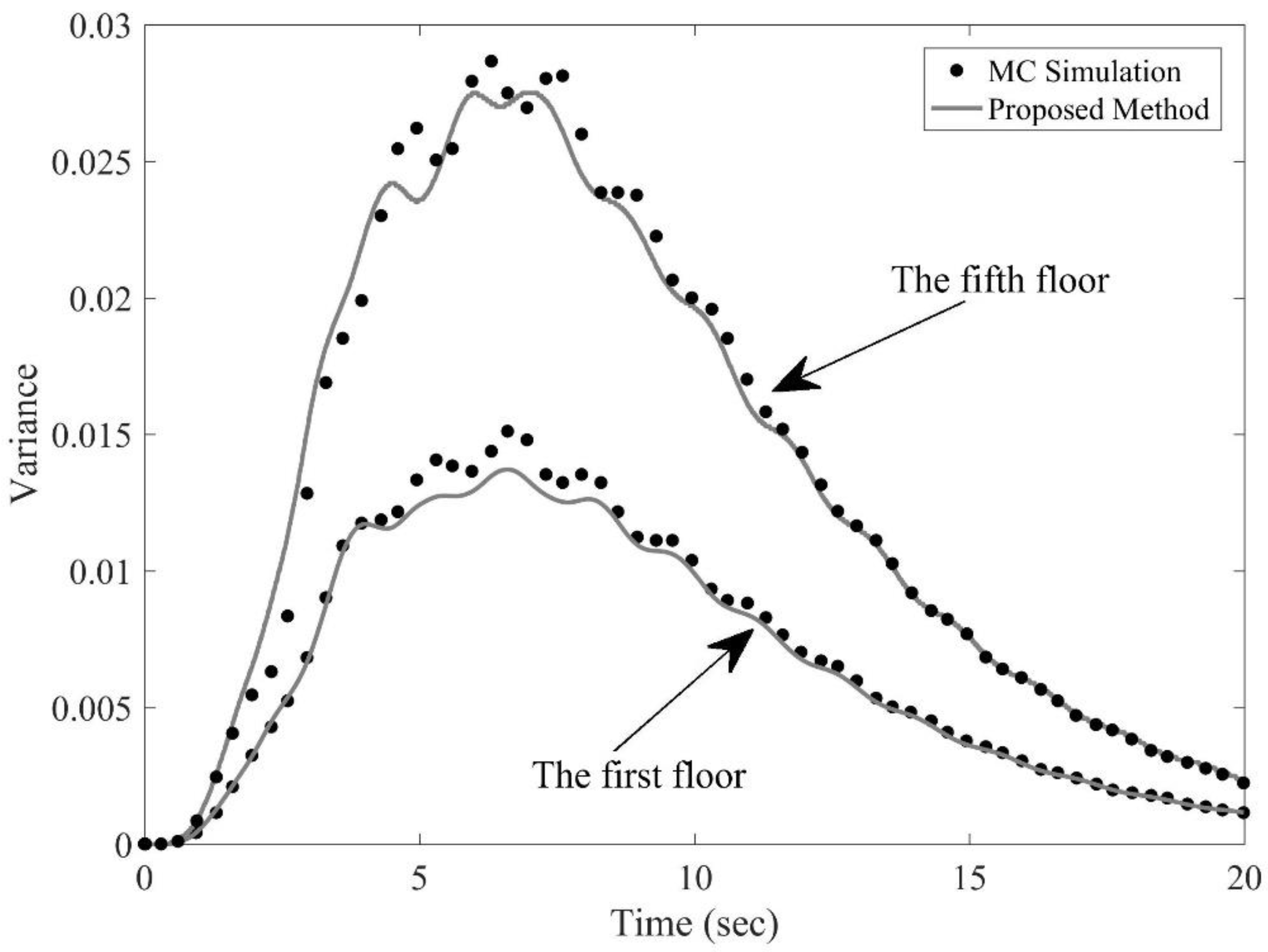
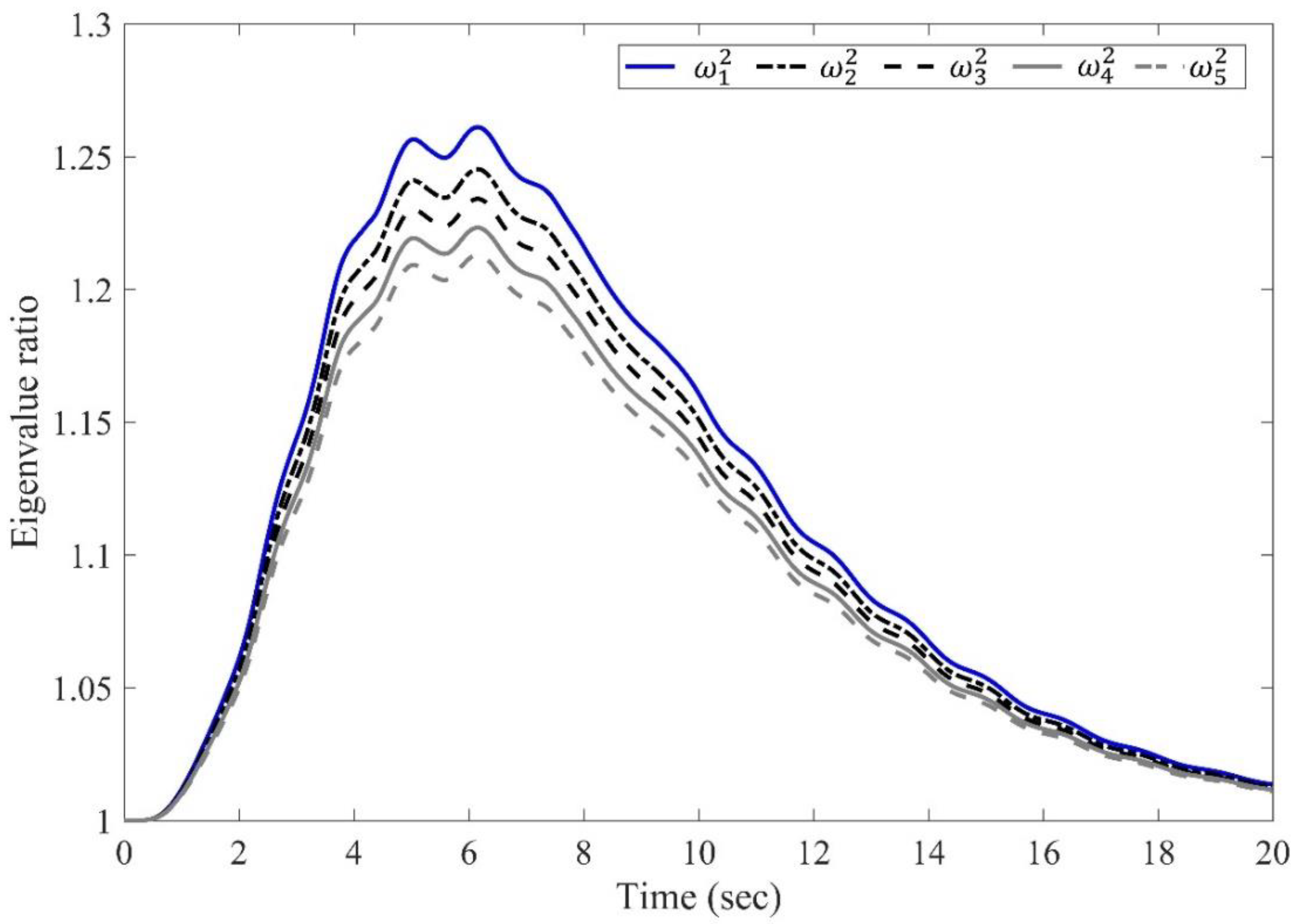
4.2. MDOF Duffing–Van der Pol Oscillator
5. Conclusions
- Compared to other existing equivalent linearization methods, the system responses predicted by the proposed method are in better agreement with those yielded from the MC simulation, which is used as benchmark in this study.
- The proposed method has high computational efficiency compared to MC simulation.
- The proposed method is applicable to any general type of nonstationary random excitations, especially when dealing with systems having higher nonlinearity and more degrees of freedom.
Author Contributions
Funding
Conflicts of Interest
References
- Crandall, S.H. Perturbation Techniques for Random Vibration of Nonlinear Systems. J. Acoust. Soc. Am. 1963, 35, 1700–1705. [Google Scholar] [CrossRef]
- Zhu, W.Q. Nonlinear Stochastic Dynamics and Control in Hamiltonian Formulation. Appl. Mech. Rev. 2006, 59, 230. [Google Scholar] [CrossRef]
- Crandall, S.H. Non-Gaussian Closure for Random Vibration of Non-Linear Oscillators. Int. J. Non. Linear. Mech. 1980, 15, 303–313. [Google Scholar] [CrossRef]
- Caughey, T.K. Response of Van Der Pol’s Oscillator to Random Excitation. J. Appl. Mech. 1959, 26, 345–348. [Google Scholar] [CrossRef]
- Proppe, C.; Pradlwarter, H.; Engineering, G.S.-P. Equivalent Linearization and Monte Carlo Simulation in Stochastic Dynamics. Probabilistic Eng. Mech. 2003, 18, 1–15. [Google Scholar] [CrossRef]
- Bernard, P.; Taazount, M. Random Dynamics of Structures with Gaps: Simulation and Spectral Linearization. Nonlinear Dyn. 1994, 5, 313–335. [Google Scholar] [CrossRef]
- Socha, L. Probability Density Equivalent Linearization Technique for Nonlinear Oscillator with Stochastic Excitations. ZAMM-J. Appl. Math. Mech. Z. Für Angew. Math. Und Mech. 1998, 78, 1087–1088. [Google Scholar] [CrossRef]
- Zhang, R. Work/Energy-Based Stochastic Equivalent Lineariztion with Optimized Power. J. Sound Vib. 2000, 230, 468–475. [Google Scholar] [CrossRef]
- Huang, C.-T.; Iwan, W.D. Equivalent Linearization for the Nonstationary Response Analysis of Nonlinear Systems with Random Parameters. J. Eng. Mech. 2006, 132, 465–474. [Google Scholar] [CrossRef]
- Orabi, I.I.; Ahmadi, G. An Iterative Method for Non-Stationary Response Analysis of Non-Linear Random Systems. J. Sound Vib. 1987, 119, 145–157. [Google Scholar] [CrossRef]
- Raoufi, R.; Ghafory-Ashtiany, M. Nonlinear Random Vibration Using Updated Tail Equivalent Linearization Method. Int. J. Adv. Struct. Eng. 2014, 6, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Ma, C.; Zhang, Y.; Zhao, Y.; Tan, P.; Zhou, F. Stochastic Seismic Response Analysis of Base-Isolated High-Rise Buildings. Procedia Eng. 2011, 14, 2468–2474. [Google Scholar] [CrossRef] [Green Version]
- Kerschen, G.; Worden, K.; Vakakis, A.F.; Golinval, J.-C. Past, Present and Future of Nonlinear System Identification in Structural Dynamics. Mech. Syst. Signal Process. 2006, 20, 505–592. [Google Scholar] [CrossRef] [Green Version]
- Su, C.; Xu, R. Random Vibration Analysis of Structures by a Time-Domain Explicit Formulation Method. Struct. Eng. Mech. 2014, 52, 239–260. [Google Scholar] [CrossRef]
- Hu, Z.; Su, C.; Chen, T.; Ma, H. An Explicit Time-Domain Approach for Sensitivity Analysis of Non-Stationary Random Vibration Problems. J. Sound Vib. 2016, 382, 122–139. [Google Scholar] [CrossRef]
- Su, C.; Huang, H.; Ma, H. Fast Equivalent Linearization Method for Nonlinear Structures under Nonstationary Random Excitations. J. Eng. Mech. 2016, 142, 04016049. [Google Scholar] [CrossRef]
- Datta, K.B.; Mohan, B.M. Orthogonal Functions in Systems and Control; World Scientific: Singapore, 1995. [Google Scholar]
- Chen, C.F.; Hsiao, C.H. Time-Domain Synthesis via Walsh Functions. Proc. Inst. Electr. Eng. 1975, 122, 565. [Google Scholar] [CrossRef]
- Pacheco, R.P.; Steffen, V. On the Identification of Non-Linear Mechanical Systems Using Orthogonal Functions. Int. J. Non. Linear. Mech. 2004, 39, 1147–1159. [Google Scholar] [CrossRef]
- Younespour, A.; Ghaffarzadeh, H. Structural Active Vibration Control Using Active Mass Damper by Block Pulse Functions. JVC/J. Vib. Control. 2015, 21, 2787–2795. [Google Scholar] [CrossRef]
- Younespour, A.; Ghaffarzadeh, H.; Azar, B.F. An Equivalent Linearization Method for Nonlinear Van Der Pol Oscillator Subjected to Random Vibration Using Orthogonal Functions. Control Theory Technol. 2018, 16, 49–57. [Google Scholar] [CrossRef]
- von Wagner, U.; Wedig, W.V. On the Calculation of Stationary Solutions of Multi-Dimensional Fokker–Planck Equations by Orthogonal Functions. Nonlinear Dyn. 2000, 21, 289–306. [Google Scholar] [CrossRef]
- Aghabalaei Baghaei, K.; Ghaffarzadeh, H.; Younespour, A. Orthogonal Function-based Equivalent Linearization for Sliding Mode Control of Nonlinear Systems. Struct. Control Health Monit. 2019, 26, e2372. [Google Scholar] [CrossRef]
- Younespour, A.; Ghaffarzadeh, H. Semi-Active Control of Seismically Excited Structures with Variable Orifice Damper Using Block Pulse Functions. Smart Struct. Syst. 2016, 18, 1111–1123. [Google Scholar] [CrossRef]
- Jiang, Z.; Schaufelberger, W. Block Pulse Functions and Their Applications in Control Systems; Springer: Berlin/Heidelberg, Germany, 1992. [Google Scholar]
- Atalik, T.S.; Utku, S. Stochastic Linearization of Multi-Degree-of-Freedom Non-Linear Systems. Earthq. Eng. Struct. Dyn. 1976, 4, 411–420. [Google Scholar] [CrossRef]
- Lutes, L.; Sarkani, S. Random Vibrations: Analysis of Structural and Mechanical Systems; Butterworth-Heinemann: Oxford, UK, 2004. [Google Scholar]
- Iwan, W.D.; Yang, I. Application of Statistical Linearization Techniques to Nonlinear Multidegree-of-Freedom Systems. J. Appl. Mech. 1972, 39, 545–550. [Google Scholar] [CrossRef]
- Yamapi, R.; Filatrella, G. Strange Attractors and Synchronization Dynamics of Coupled Van Der Pol–Duffing Oscillators. Commun. Nonlinear Sci. Numer. Simul. 2008, 13, 1121–1130. [Google Scholar] [CrossRef]
- Bogdanoff, J.; Goldberg, J.E.; Bernard, M.C. Response of a Simple Structure to a Random Earthquake-Type Disturbance. Bull. Seismol. Soc. Am. 1961, 51, 293–310. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Strength of Nonlinearity | ||||
|---|---|---|---|---|
| γ = 1.0, μ = 1.0 | γ = 1.0, μ = 1.0 | γ = 1.0, μ = 1.0 | γ = 1.0, μ = 1.0 | |
| Orabi and Ahmadi Method [10] | 12 | 34 | 36 | 37 |
| Proposed Method | 11 | 30 | 32 | 35 |
| Strength of Nonlinearity | ||||
|---|---|---|---|---|
| γ = 1.0, μ = 1.0 | γ = 1.0, μ = 10 | γ =10, μ = 1.0 | γ = 10, μ = 10 | |
| Orabi and Ahmadi Method [10] | 7 | 8 | 11 | 17 |
| Present Method | 4 | 6 | 8 | 10 |
| Strength of Nonlinearity | ||||
|---|---|---|---|---|
| γ = 1.0, μ = 1.0 | γ = 1.0, μ = 10 | γ = 10, μ = 1.0 | γ = 10, μ = 10 | |
| 3120 s | 3201 s | 3580 s | 3666 s | |
| 26.25 s | 47.5 s | 48.1 s | 67 s | |
| 119 | 67 | 74 | 55 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Younespour, A.; Ghaffarzadeh, H.; Cheng, S. Application of Orthogonal Functions to Equivalent Linearization Method for MDOF Duffing–Van der Pol Systems under Nonstationary Random Excitations. Computation 2023, 11, 8. https://doi.org/10.3390/computation11010008
Younespour A, Ghaffarzadeh H, Cheng S. Application of Orthogonal Functions to Equivalent Linearization Method for MDOF Duffing–Van der Pol Systems under Nonstationary Random Excitations. Computation. 2023; 11(1):8. https://doi.org/10.3390/computation11010008
Chicago/Turabian StyleYounespour, Amir, Hosein Ghaffarzadeh, and Shaohong Cheng. 2023. "Application of Orthogonal Functions to Equivalent Linearization Method for MDOF Duffing–Van der Pol Systems under Nonstationary Random Excitations" Computation 11, no. 1: 8. https://doi.org/10.3390/computation11010008