

NARX Technique to Predict Torque in Internal Combustion Engines



Abstract
:1. Introduction
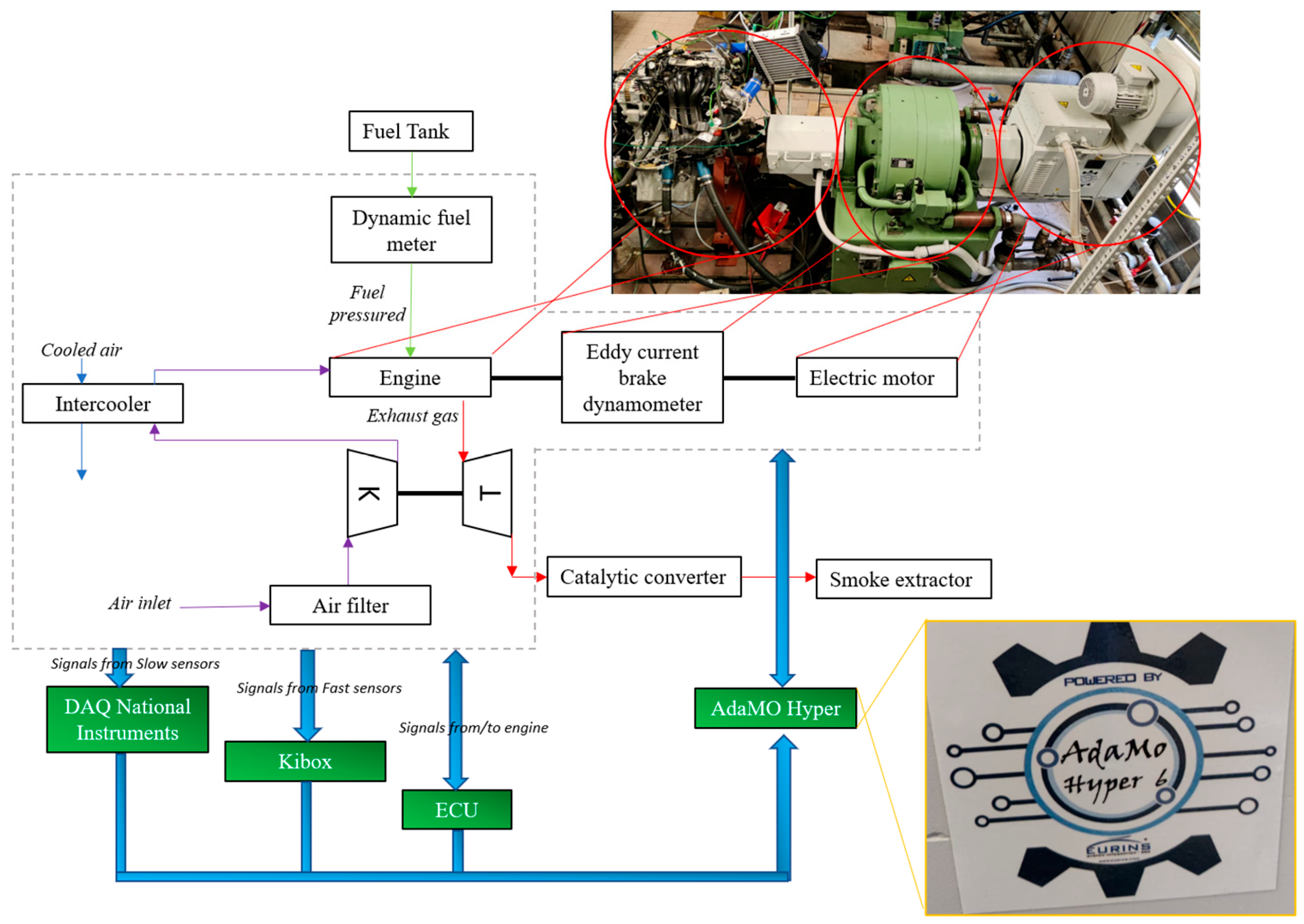
2. Experimental Setup
3. Artificial Neural Network Setup and Methods
- -
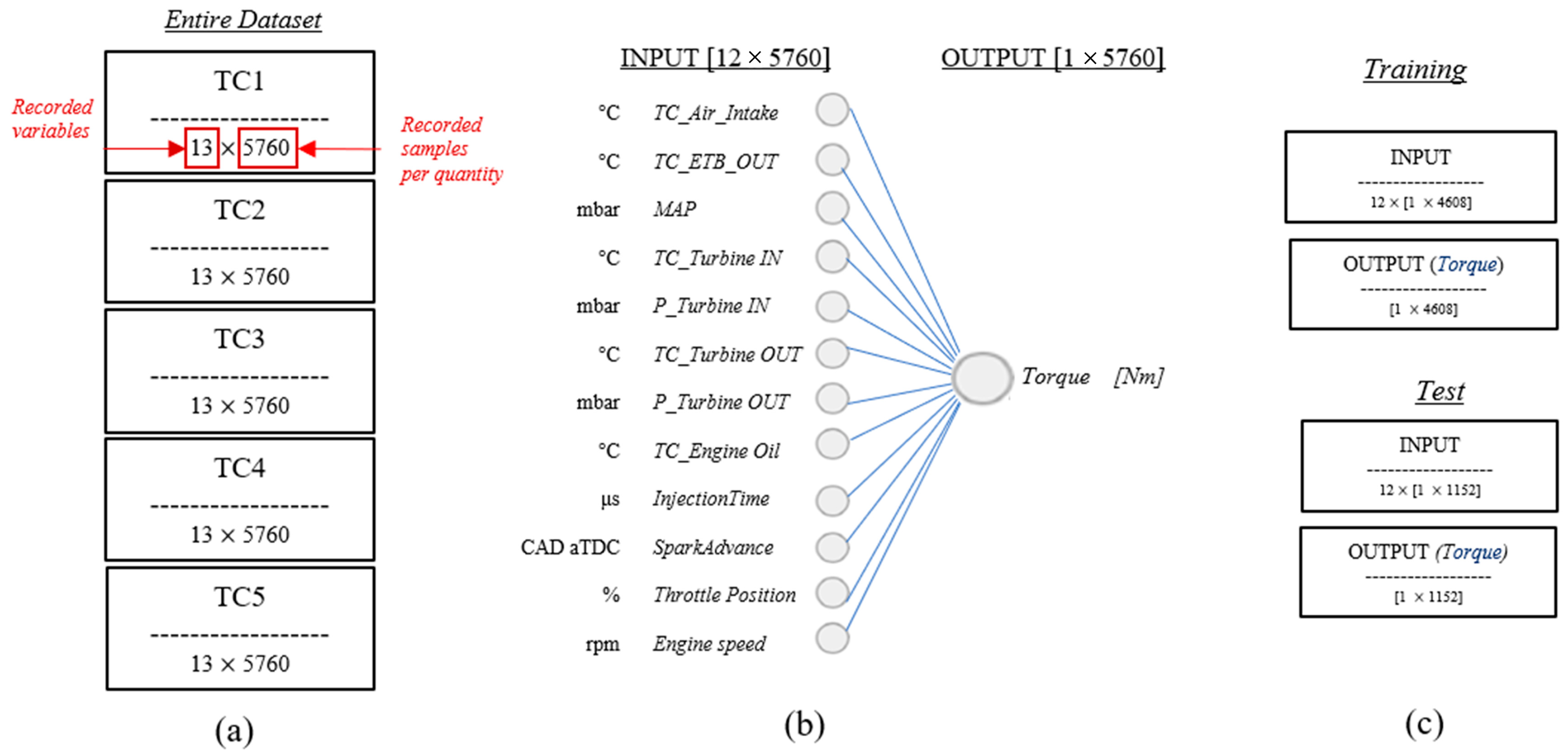
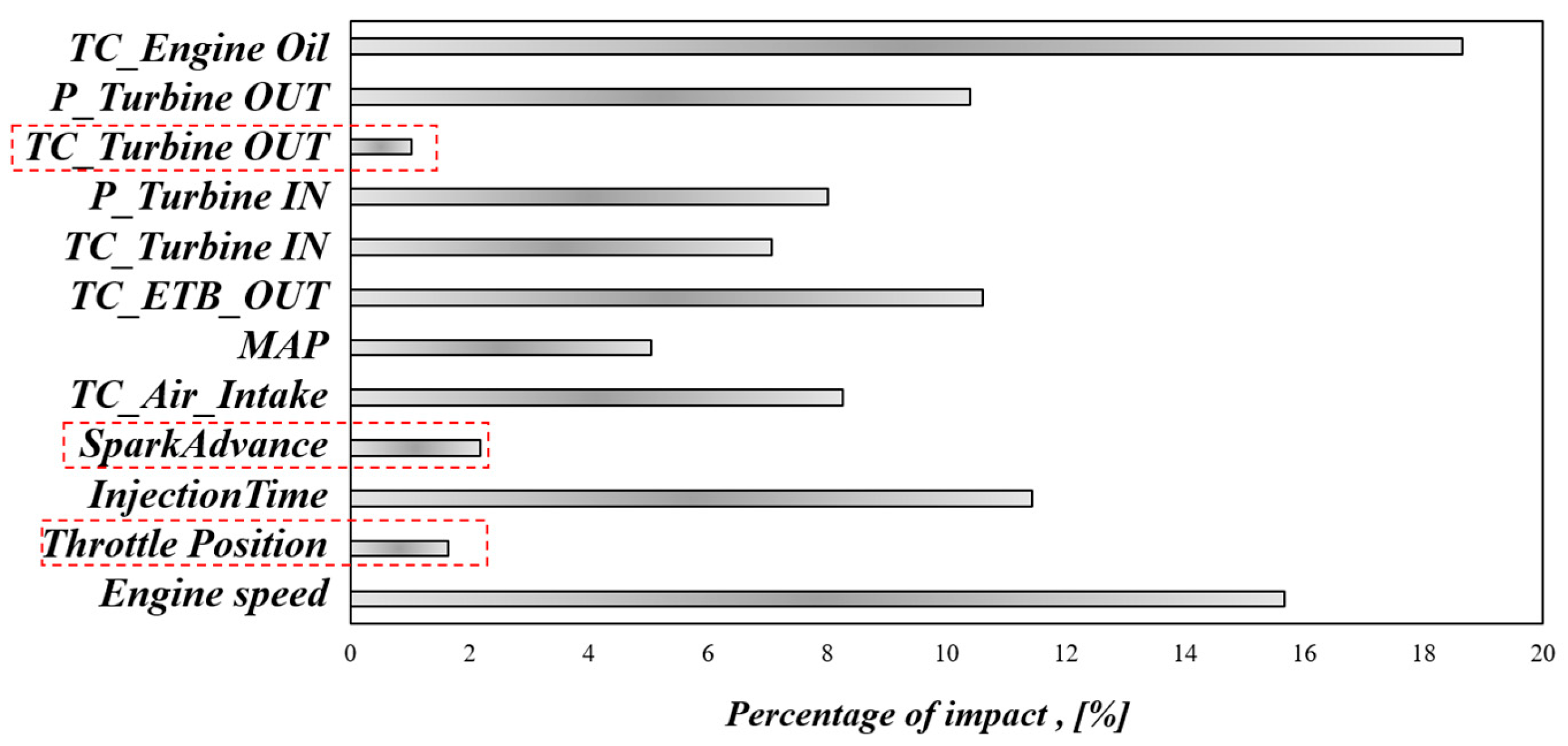
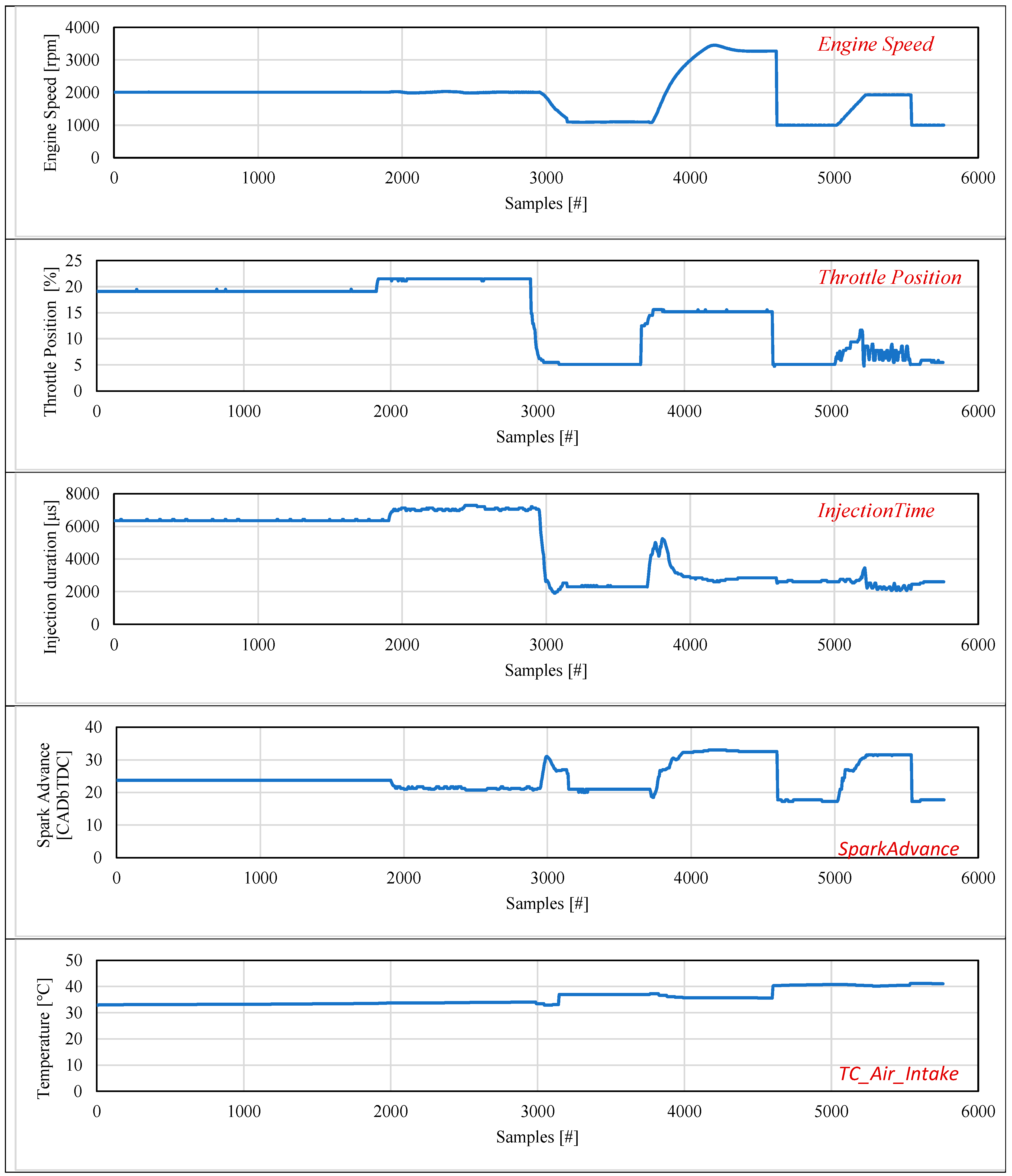
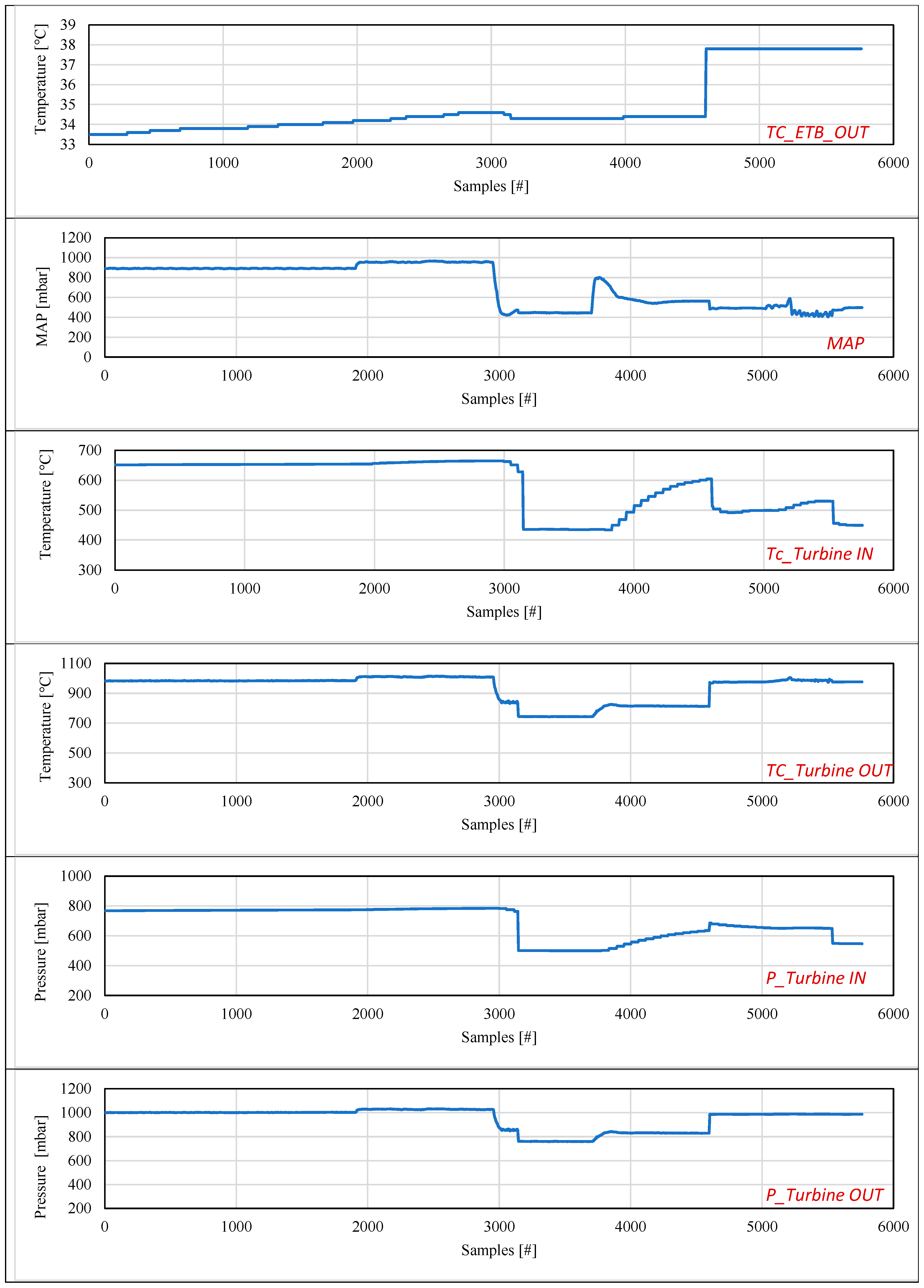
- Pressure sensors and thermocouples:temperature of the air before the filter (TC_Air_Intake), temperature and pressure of the air at the intake pipe (TC_ETB_OUT and MAP), pressure and temperature of the exhaust gas before (TC_Turbine IN, P_Turbine IN) and after the turbine (TC_Turbine OUT and P_Turbine OUT), temperature of the engine oil (TC_Engine Oil).
- -
- Engine control unit actuation:activation time of the injector (InjectionTime) and ignition timing of the spark (SparkAdvance) at the first cylinder beside the flywheel.
- -
- AdaMo actuation:throttle valve opening (Throttle Position) and engine speed (Engine speed).
- -
- The number of hidden neurons should be between the size of the input layer and the size of the output layer.
- -
- The number of hidden neurons should be 2/3 the size of the input layer, plus the size of the output layer.
- -
- The number of hidden neurons should be less than twice the size of the input layer.
4. Results and Discussion
5. Conclusions
- -
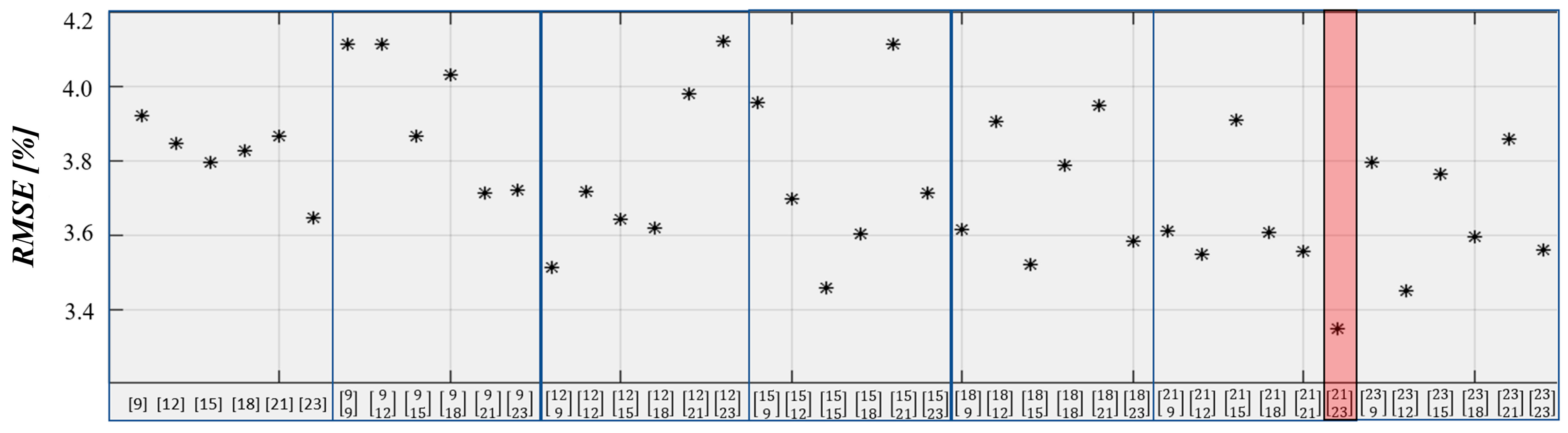
- The training performance of different combinations of neurons and hidden layers was evaluated in terms of RMSE on a specific case from the five analyzed in this work. All combinations showed RMSE values below the acceptable threshold of 5%. The structure with 2 hidden layers and 21 and 23 neurons, respectively, showed the best performance with an RMSE equal to 3.37%.
- -
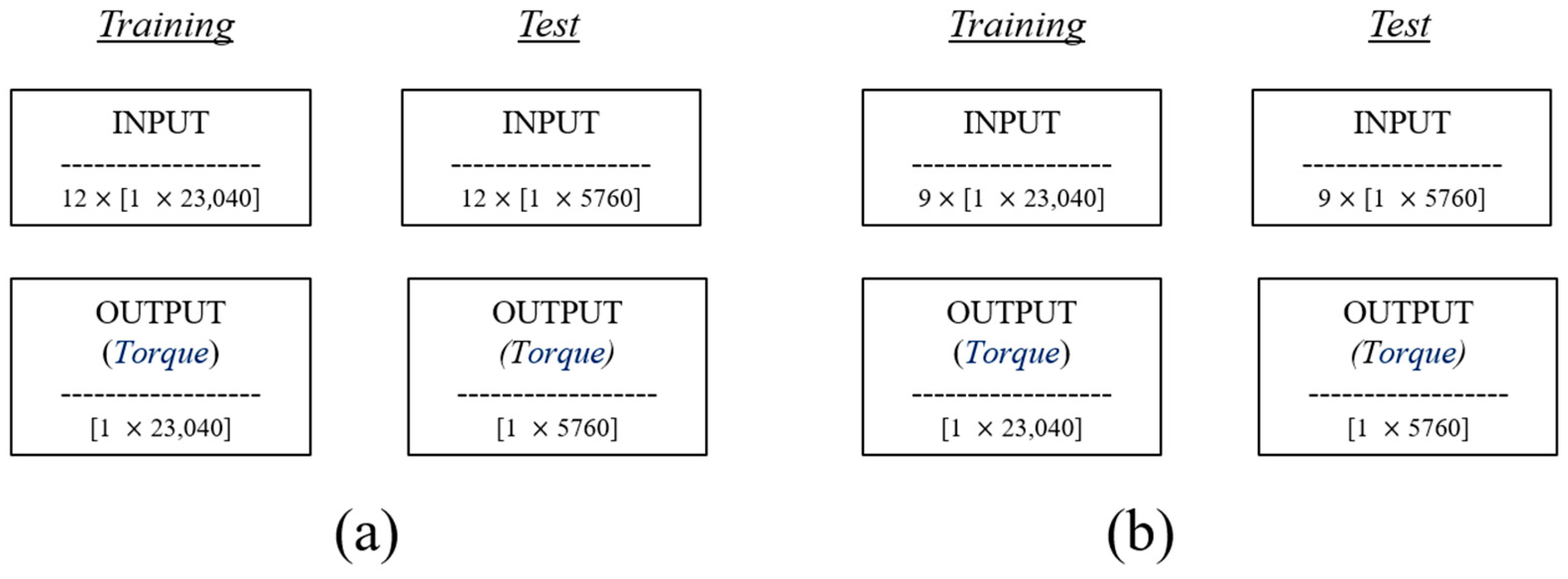
- The Shapley analysis performed on the entire dataset allowed identification of the least influential input variables for the prediction. These variables were excluded and therefore the number of inputs was reduced from 12 to 9.
- -
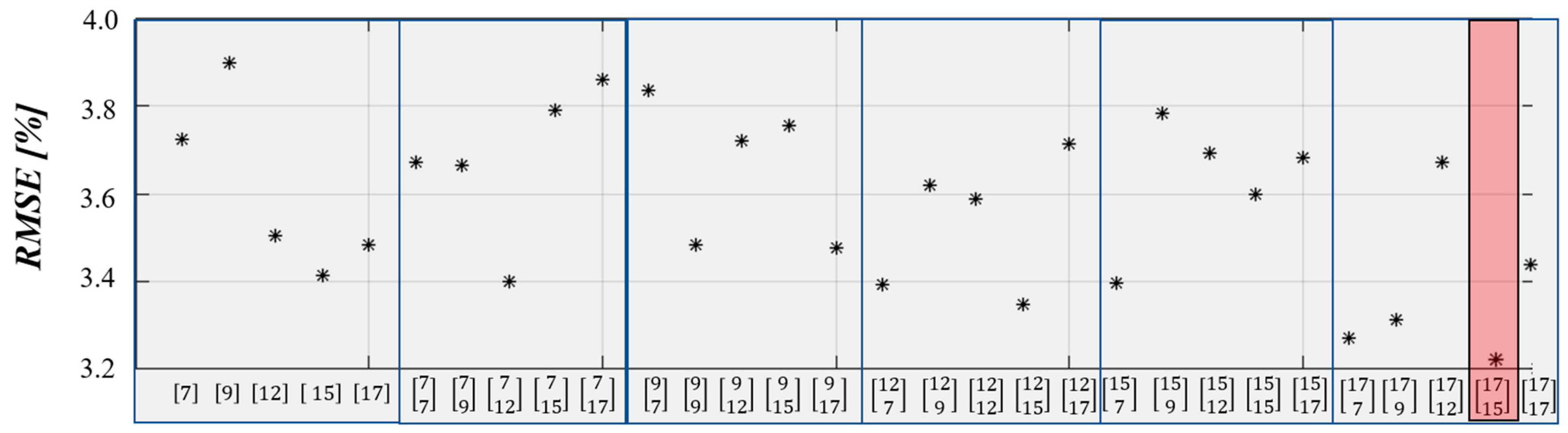
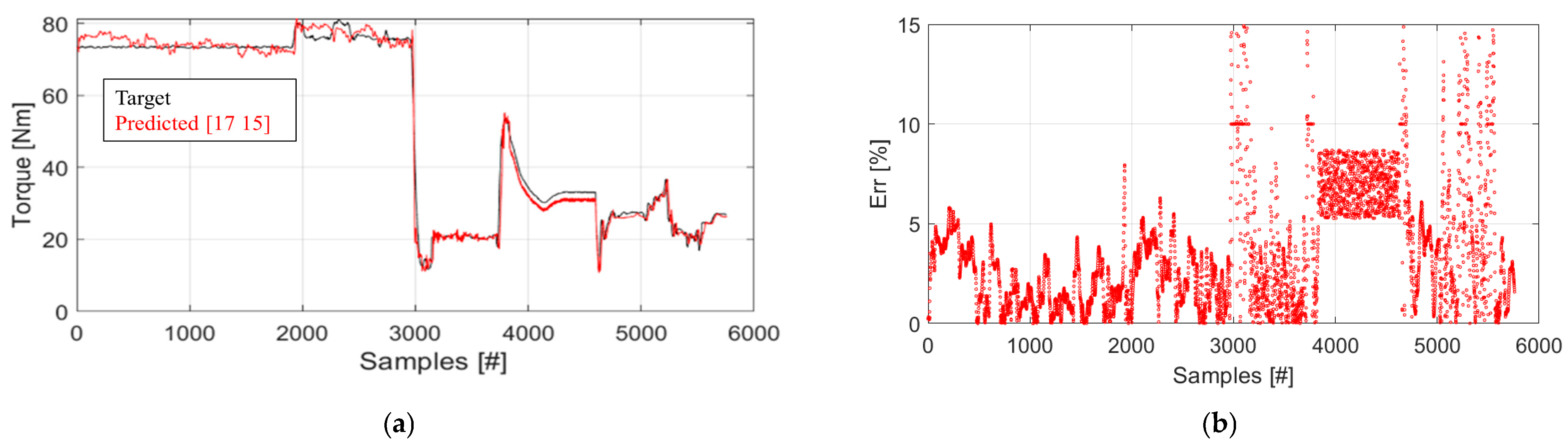
- The NARX structure optimization performed on the reduced dataset showed the capability of the 25 combinations of neurons and hidden layers tested to achieve RMSE values below 5% during the training session. In particular, the structure with {17 15} neurons in 2 hidden layers showed the best performance with an RMSE of about 3%.
- -
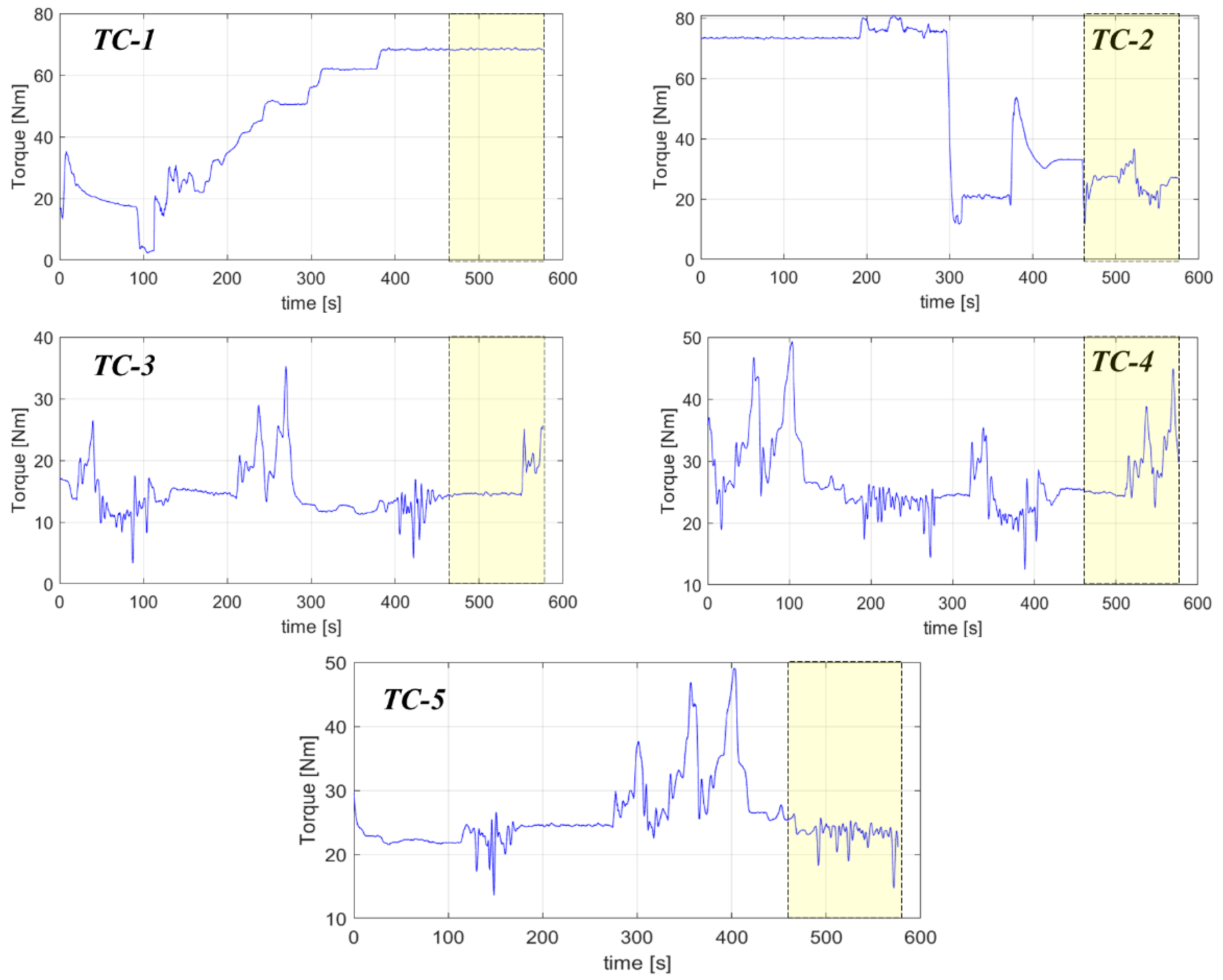
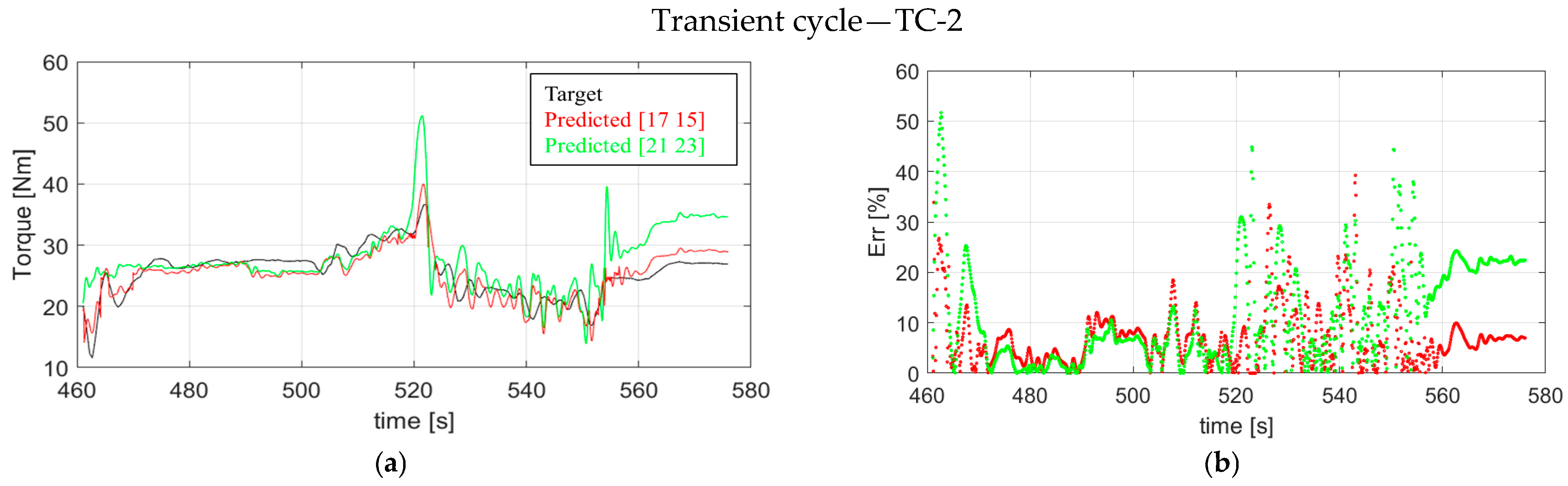
- The forecasting performance of the tested structures, i.e., {21 23} for the entire dataset and {17 15} for the reduced one, were evaluated on a specific case (TC-2). Both architectures reproduced the trend target; in particular, {17 15} showed smaller amplitude fluctuations and more consistent behavior with the target. An average error Erravg of about 7%, i.e., below the acceptable threshold of 10%, was shown by such a structure. Conversely, {21 23} generated Erravg of 11.44%, above the acceptable threshold.
- -
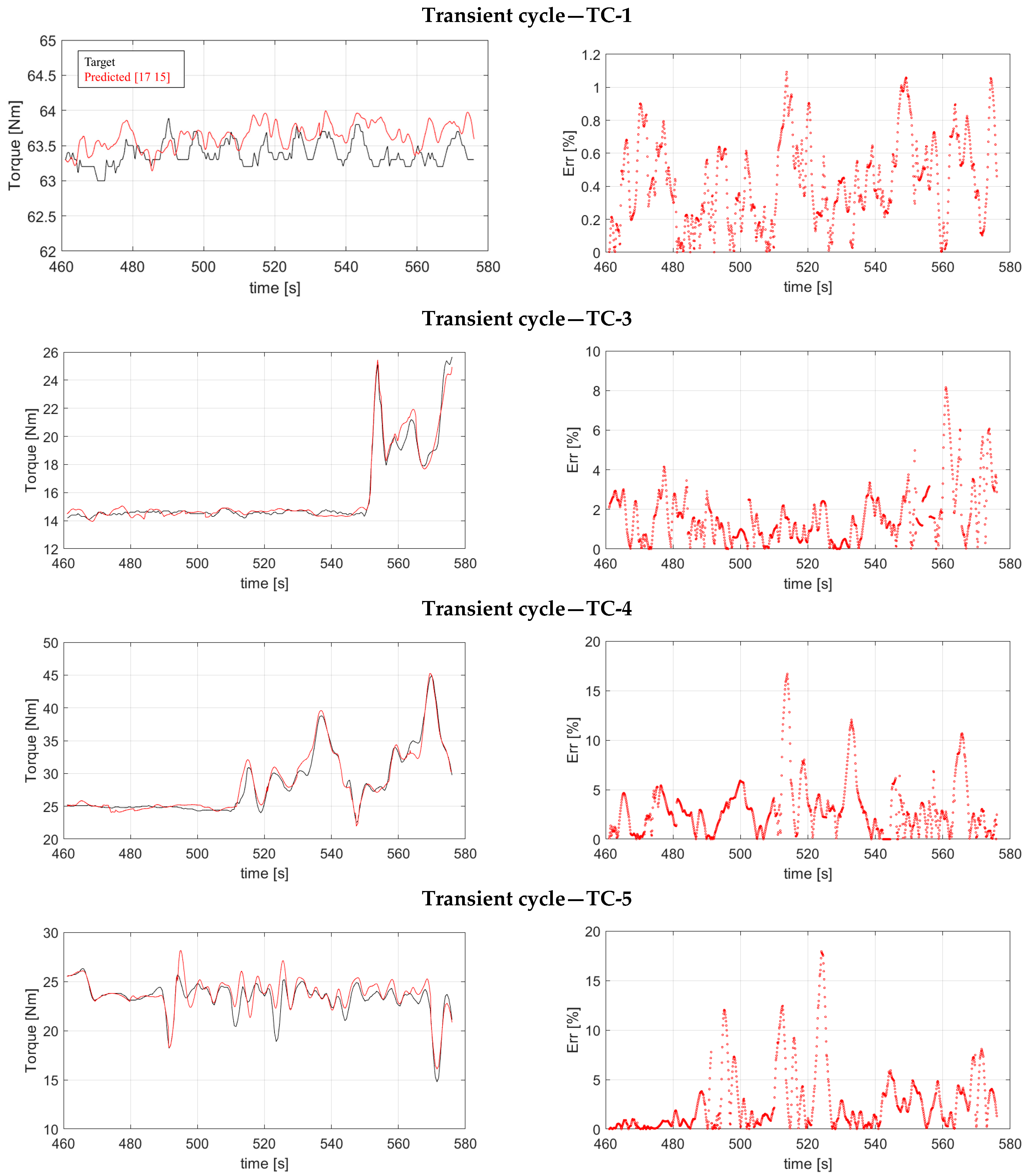
- The structure {17 15} was evaluated on four other different cycles. It was able to follow the oscillations of the target signal, showing average errors always lower than 10%.
- -
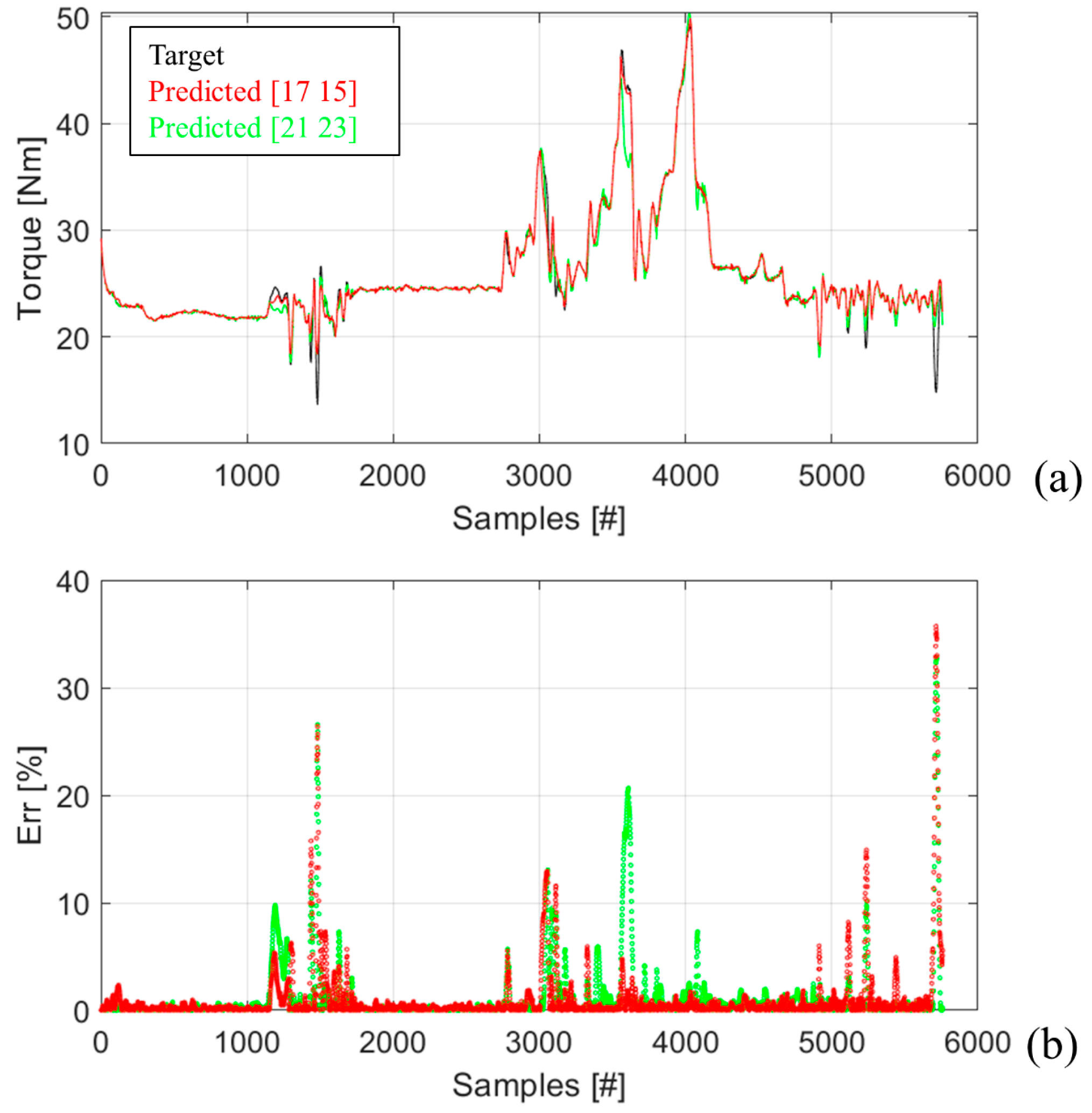
- The five cycles tested were merged and both structures, i.e., {21 23} for the entire dataset and {17 15} for the reduced one, performed better than the previous activities. The structure {17 15} showed Erravg of 0.99%, and {21 23} showed 1.13%.
- -
- The five cycles were randomly merged and the forecasting performance of {17 15} was evaluated. Such an architecture showed Erravg of about 3.6% and an excellent ability to reproduce the target.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| ERR | Percentage error |
| ERRavg | Average percentage error |
| ANN | Artificial neural network |
| ECU | Engine control unit |
| FFANN | Feed forward artificial neural network |
| HCCI | Homogeneous charge compression ignition |
| ICE | Internal combustion engine |
| ML | Machine learning |
| MLP | Multi-layer perceptron |
| MON | Motor octane number |
| NARX | Nonlinear autoregressive network with exogenous inputs |
| PFI | Port fuel injection |
| RBF | Radial basis function |
| RMSE | Root-mean-square error |
| RON | Research octane number |
| SI | Spark ignition |
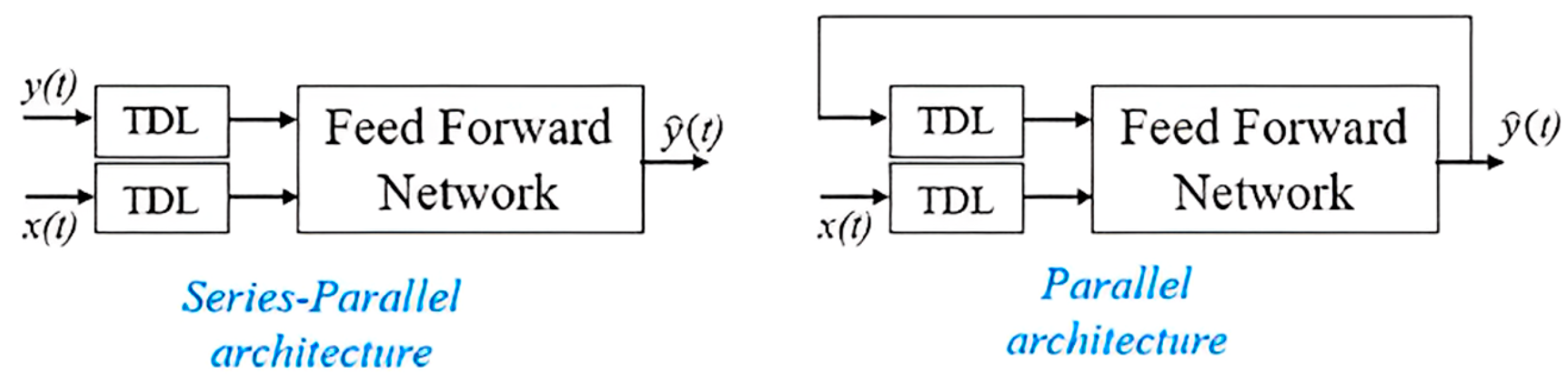
| TDL | Tapped delay line |
Appendix A


References
- Lim, K.Y.H.; Zheng, P.; Chen, C.H. A state-of-the-art survey of Digital Twin: Techniques, engineering product lifecycle management and business innovation perspectives. J. Intell. Manuf. 2020, 31, 1313–1337. [Google Scholar] [CrossRef]
- Reitz, R.D.; Ogawa, H.; Payri, R.; Fansler, T.; Kokjohn, S.; Moriyoshi, Y.; Agarwal, A.; Arcoumanis, D.; Assanis, D.; Bae, C.; et al. IJER Editorial: The Future of the Internal Combustion Engine. Int. J. Engine Res. 2020, 21, 3–10. [Google Scholar] [CrossRef] [Green Version]
- Ricci, F.; Cruccolini, V.; Discepoli, G.; Petrucci, L.; Grimaldi, C.; Papi, S. Luminosity and Thermal Energy Measurement and Comparison of a Dielectric Barrier Discharge in an Optical Pressure-Based Calorimeter at Engine Relevant Conditions; SAE Technical Paper No. 2021-01-0427; SAE International: Warrendale, PA, USA, 2021. [Google Scholar] [CrossRef]
- Iqbal, M.Y.; Wang, T.; Li, G.; Li, S.; Hu, G.; Yang, T.; Gu, F.; Al-Nehari, M. Development and Validation of a Vibration-Based Virtual Sensor for Real-Time Monitoring NOx Emissions of a Diesel Engine. Machines 2022, 10, 594. [Google Scholar] [CrossRef]
- Liao, J.; Hu, J.; Yan, F.; Chen, P.; Zhu, L.; Zhou, Q.; Xu, H.; Li, J. A comparative investigation of advanced machine learning methods for predicting transient emission characteristic of diesel engine. Fuel 2023, 350, 128767. [Google Scholar] [CrossRef]
- Escobar, C.A.; Morales-Menendez, R. Machine learning techniques for quality control in high conformance manufacturing environment. Adv. Mech. Eng. 2018, 10, 1–16. [Google Scholar] [CrossRef] [Green Version]
- Suzuki, K. (Ed.) Artificial Neural Networks—Industrial and Control Engineering; IntechOpen: London, UK, 2011. [Google Scholar]
- Quartullo, R.; Garulli, A.; Giannitrapani, A.; Minamino, R.; Vichi, G. In-Cylinder Pressure Estimation from Rotational Speed Measurements via Extended Kalman Filter. Sensors 2023, 23, 4326. [Google Scholar] [CrossRef]
- Shamekhi, A.; Shamekhi, A.H. Expert Systems with Applications: A New Approach in Improvement of Mean Value Models for Spark Ignition Engines Using Neural Networks. Expert Syst. Appl. 2015, 42, 5192–5218. [Google Scholar] [CrossRef]
- Bai, S.; Li, M.; Lu, Q.; Fu, J.; Li, J.; Qin, L. A new measuring method of dredging concentration based on hybrid ensemble deep learning technique. Measurement 2022, 188, 110423. [Google Scholar] [CrossRef]
- Petrucci, L.; Ricci, F.; Mariani, F.; Mariani, A. From real to virtual sensors, an artificial intelligence approach for the industrial phase of end-of-line quality control of GDI pumps. Measurement 2022, 199, 111583. [Google Scholar] [CrossRef]
- Pan, H.; Xu, H.; Liu, Q.; Zheng, J.; Tong, J. An intelligent fault diagnosis method based on adaptive maximal margin tensor machine. Measurement 2022, 198, 111337. [Google Scholar] [CrossRef]
- Abbas, A.T.; Pimenov, D.Y.; Erdakov, I.N.; Mikolajczyk, T.; Soliman, M.S.; El Rayes, M.M. Optimization of cutting conditions using artificial neural networks and the Edgeworth-Pareto method for CNC face-milling operations on high-strength grade-H steel. Int. J. Adv. Manuf. Technol. 2018, 105, 2151–2165. [Google Scholar] [CrossRef] [Green Version]
- Petrucci, L.; Ricci, F.; Mariani, F.; Cruccolini, V.; Violi, M. Engine Knock Evaluation Using a Machine Learning Approach; SAE Technical Paper No. 2020-24-0005; SAE International: Warrendale, PA, USA, 2020. [Google Scholar]
- Gölc, M.; Sekmen, Y.; Erduranli, P.; Salman, M.S. Artificial Neural-Network Based Modeling of Variable Valve-Timing in a Spark-Ignition Engine. Appl. Energy 2005, 81, 187–197. [Google Scholar] [CrossRef]
- Petrucci, L.; Ricci, F.; Mariani, F.; Discepoli, G. A Development of a New Image Analysis Technique for Detecting the Flame Front Evolution in Spark Ignition Engine under Lean Condition. Vehicles 2022, 4, 145–166. [Google Scholar] [CrossRef]
- Petrucci, L.; Ricci, F.; Martinelli, R.; Mariani, F. Detecting the Flame Front Evolution in Spark-Ignition Engine under Lean Condition Using the Mask R-CNN Approach. Vehicles 2022, 4, 978–995. [Google Scholar] [CrossRef]
- Ali, W.; Khan, W.U.; Raja, M.A.Z.; He, Y.; Li, Y. Design of nonlinear autoregressive exogenous model based intelligence computing for efficient state estimation of underwater passive target. Entropy 2021, 23, 550. [Google Scholar] [CrossRef]
- Dassanayake, S.; Mousa, A.; Fowmes, G.J.; Susilawati, S.; Zamara, K. Forecasting the moisture dynamics of a landfill capping system comprising different geosynthetics: A NARX neural network approach. Geotext. Geomembr. 2023, 51, 282–292. [Google Scholar] [CrossRef]
- Taghavi, M.; Gharehghani, A.; Nejad, F.B.; Mirsalim, M. Developing a model to predict the start of combustion in HCCI engine using ANN-GA approach. Energy Convers. Manag. 2019, 195, 57–69. [Google Scholar] [CrossRef]
- Kitanović, M.; Mrđa, P.D.; Popović, S.; Miljić, N. The Influence of NARX Control Parameters on the Fuel Efficiency Improvement of a Hydraulic Hybrid Powertrain System. In Proceedings of the 9th International Congress Motor Vehicles & Motors 2022, Kragujevac, Serbia, 13–14 October 2022; pp. 29–30. [Google Scholar]
- Asgari, H.; Ory, E. Prediction of Dynamic Behavior of a Single Shaft Gas Turbine Using NARX Models. In Proceedings of the ASME Turbo Expo 2021: Turbomachinery Technical Conference and Exposition, Virtual, Online, 7–11 June 2021; Volume 6. [Google Scholar] [CrossRef]
- Salehi, A.; Montazeri-Gh, M. Black box modeling of a turboshaft gas turbine engine fuel control unit based on neural NARX. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2019, 233, 949–956. [Google Scholar] [CrossRef]
- Wang, W.; Lu, Y. Analysis of the mean absolute error (MAE) and the root mean square error (RMSE) in assessing rounding model. IOP Conf. Ser. Mater. Sci. Eng. 2018, 324, 012049. [Google Scholar] [CrossRef]
- Jing, L.; Zhan, Y.; Li, Q.; Peng, X.; Li, J.; Gao, F.; Jiang, S. An integrated product conceptual scheme decision approach based on Shapley value method and fuzzy logic for economic-technical objectives trade-off under uncertainty. Comput. Ind. Eng. 2021, 156, 107281. [Google Scholar] [CrossRef]
- Alghafir, M.; Dunne, J. A NARX damper model for virtual tuning of automotive suspension systems with high-frequency loading. Veh. Syst. Dyn. 2012, 50, 167–197. [Google Scholar] [CrossRef]
- Fu, J.; Liao, G.; Yu, M.; Li, P.; Lai, J. NARX neural network modeling and robustness analysis of magnetorheological elastomerisolator. Smart Mater. Struct. 2016, 25, 125019. [Google Scholar] [CrossRef]
- Cadenas, E.; Rivera, W.; Campos-Amezcua, R.; Heard, C. Wind speed prediction using a univariate ARIMA model and amultivariate NARX model. Energies 2016, 9, 109. [Google Scholar] [CrossRef] [Green Version]
- Available online: https://medium.com/geekculture/introduction-to-neural-network2f8b8221fbd3#:~:text=The%20number%20of%20hidden%20neurons,size%20of%20the%20input%20layer (accessed on 1 April 2023).
- Tang, S.; Ghorbani, A.; Yamashita, R.; Rehman, S.; Dunnmon, J.A.; Zou, J.; Rubin, D.L. Data valuation for medical imaging using Shapley value and application to a large-scale chest X-ray dataset. Sci. Rep. 2021, 11, 8366. [Google Scholar] [CrossRef] [PubMed]
- Hart, S. “Shapley Value” Game Theory; Palgrave Macmillan: London, UK, 1989; pp. 210–216. [Google Scholar]
- Ricci, F.; Petrucci, L.; Mariani, F. Using a Machine Learning Approach to Evaluate the NOx Emissions in a Spark-Ignition Optical Engine. Information 2023, 14, 224. [Google Scholar] [CrossRef]
- Merkisz, J.; Fuc, P.; Lijewski, P.; Bielaczyc, P. The Comparison of the Emissions from Light Duty Vehicle in On-Road and NEDC Tests; SAE Technical Paper: Warrendale, PA, USA, 2010. [Google Scholar]
- Duan, X.; Fu, J.; Zhang, Z.; Liu, J.; Zhao, D.; Zhu, G. Experimental study on the energy flow of a gasoline-powered vehicle under the NEDC of cold starting. Appl. Therm. Eng. 2017, 115, 1173–1186. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Displacement | 999 cc |
| Cylinders | 3 Cyl./4 V per Cyl. |
| Bore | 72 mm |
| Stroke | 81.8 mm |
| Compression ratio | 10:1 |
| Engine configuration | Inline |
| Power | 84 CV at 5250 rpm |
| Torque | 120 Nm at 3250 rpm |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ricci, F.; Petrucci, L.; Mariani, F.; Grimaldi, C.N. NARX Technique to Predict Torque in Internal Combustion Engines. Information 2023, 14, 417. https://doi.org/10.3390/info14070417
Ricci F, Petrucci L, Mariani F, Grimaldi CN. NARX Technique to Predict Torque in Internal Combustion Engines. Information. 2023; 14(7):417. https://doi.org/10.3390/info14070417
Chicago/Turabian StyleRicci, Federico, Luca Petrucci, Francesco Mariani, and Carlo Nazareno Grimaldi. 2023. "NARX Technique to Predict Torque in Internal Combustion Engines" Information 14, no. 7: 417. https://doi.org/10.3390/info14070417