
Earthquake Detection at the Edge: IoT Crowdsensing Network



Abstract
:1. Introduction
Motivation
2. Related Work
3. State-of-the-Art
3.1. Quake-Catcher Network
3.2. MyShake
3.3. CrowdQuake
3.4. SOSEWIN
3.5. SeismoCloud
4. Proposed Architecture
4.1. Probes, Detectors, and Local Authorities
4.2. Network Architecture
4.3. Bootstrap Sequence
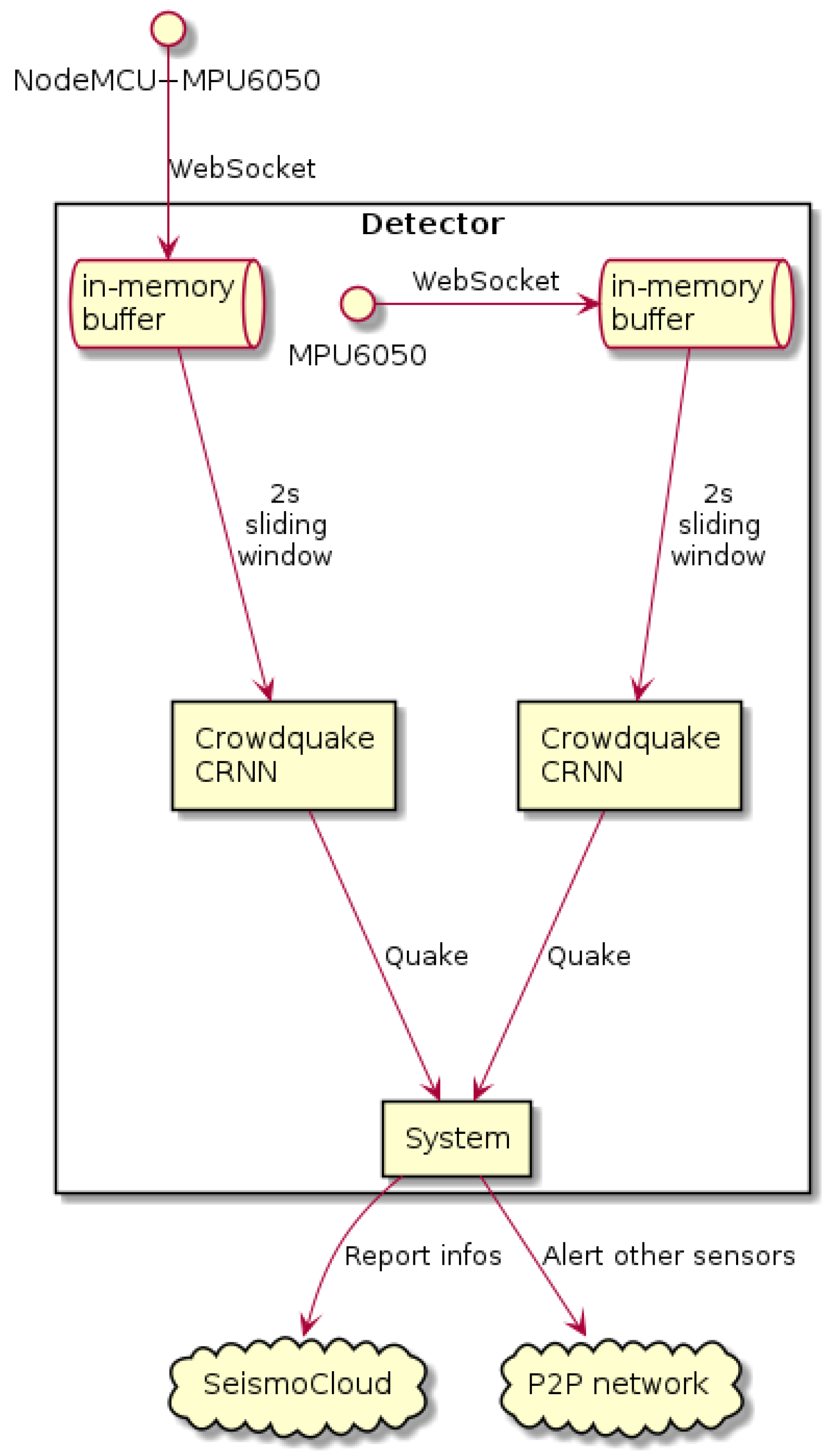
4.4. Detection Pipeline
4.5. Scalability
4.6. Fault Tolerance
4.7. Privacy
4.8. Practical Implementation Aspects
5. Prototype Implementation
5.1. Sensors Hardware
5.2. Software
5.3. Detection Pipeline
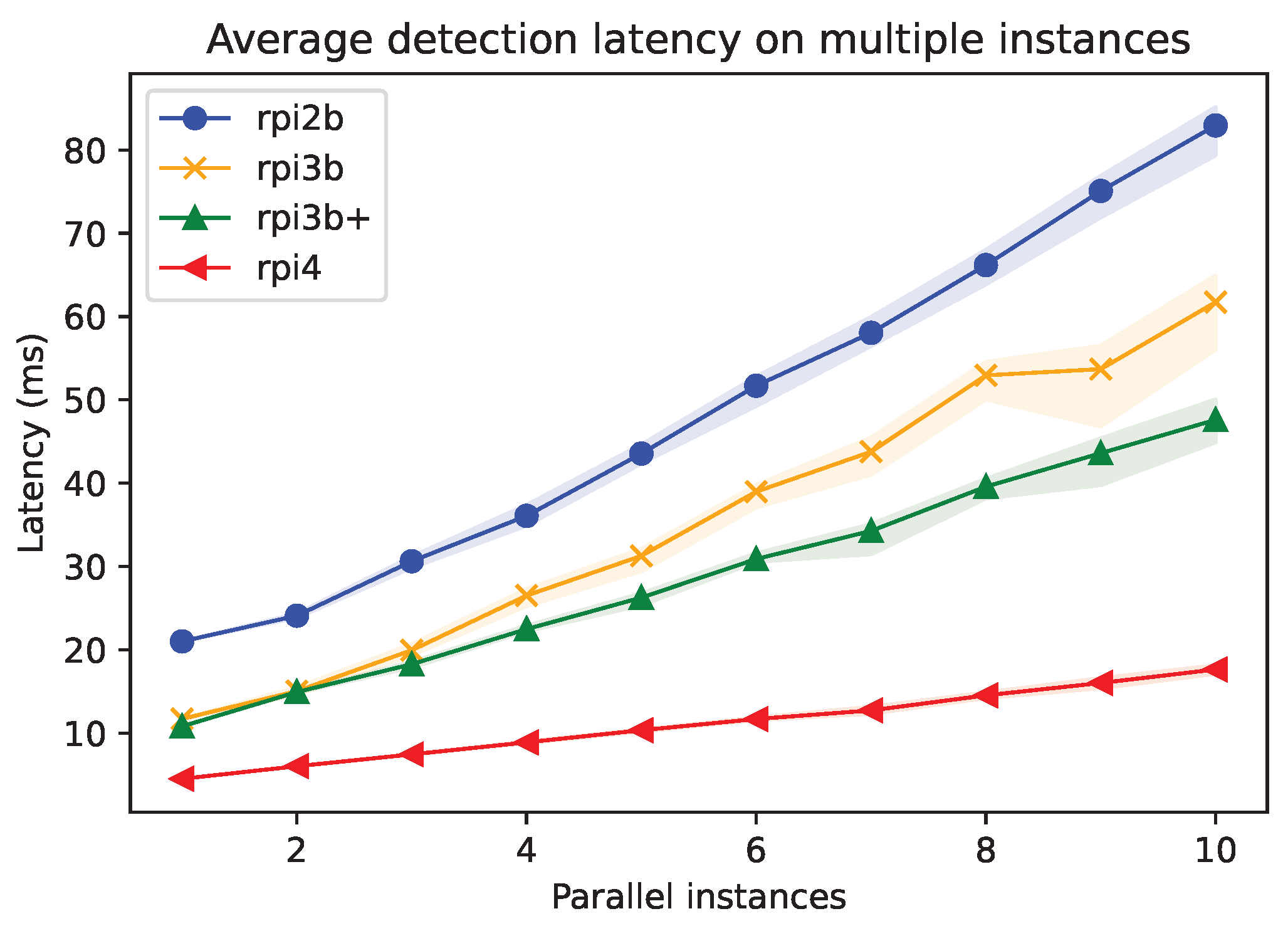
6. Results
Limits
7. Discussion
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| BTS | Base Transceiver Station |
| CRNN | Convolutional-Recurrent Neural Network |
| EEW | Earthquake Early Warning |
| FWA | Fixed-Wireless Access |
| GPIO | General Purposes Input/Output |
| GPU | Graphics Processing Unit |
| HA | High availability |
| IoT | Internet-of-Things |
| JMA | Japan Meteorological Agency |
| LPWAN | Low Power Wide Area Network |
| MEMS | Micro-Electro-Mechanical Systems |
| MQTT | Message Queuing Telemetry Transport |
| SDK | Software-Development Kit |
| SPoF | Single point of failure |
| TLS | Transport Layer Security |
| UCD | User-Centered Design |
References
- Hoshiba, M.; Kamigaichi, O.; Saito, M.; Tsukada, S.; Hamada, N. Earthquake early warning starts nationwide in Japan. EOS Trans. Am. Geophys. Union 2008, 89, 73–74. [Google Scholar] [CrossRef]
- Allen, R.M.; Kong, Q.; Martin-Short, R. The MyShake platform: A global vision for earthquake early warning. Pure Appl. Geophys. 2020, 177, 1699–1712. [Google Scholar] [CrossRef] [Green Version]
- Zhang, L.; Pathak, P.H.; Wu, M.; Zhao, Y.; Mohapatra, P. Accelword: Energy efficient hotword detection through accelerometer. In Proceedings of the 13th Annual International Conference on Mobile Systems, Applications, and Services, Florence, Italy, 18–22 May 2015; pp. 301–315. [Google Scholar]
- Tsitsiklis, J. Decentralized Detection-Advances in Syatis—Tical Signal Processing; JAI: Greenwich, CT, USA, 1990. [Google Scholar]
- Faulkner, M.; Liu, A.H.; Krause, A. A fresh perspective: Learning to sparsify for detection in massive noisy sensor networks. In Proceedings of the 12th International Conference on Information Processing in Sensor Networks, Philadelphia, PA, USA, 8–11 April 2013; pp. 7–18. [Google Scholar]
- Cochran, E.S.; Lawrence, J.F.; Christensen, C.; Jakka, R.S. The quake-catcher network: Citizen science expanding seismic horizons. Seismol. Res. Lett. 2009, 80, 26–30. [Google Scholar] [CrossRef]
- Kong, Q.; Allen, R.M.; Schreier, L.; Kwon, Y.W. MyShake: A smartphone seismic network for earthquake early warning and beyond. Sci. Adv. 2016, 2, e1501055. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Finazzi, F. The earthquake network project: Toward a crowdsourced smartphone-based earthquake early warning system. Bull. Seismol. Soc. Am. 2016, 106, 1088–1099. [Google Scholar] [CrossRef] [Green Version]
- Panizzi, E. The seismocloud app: Your smartphone as a seismometer. In Proceedings of the International Working Conference on Advanced Visual Interfaces, Bari, Italy, 7–10 June 2016; pp. 336–337. [Google Scholar]
- Huang, X.; Lee, J.; Kwon, Y.W.; Lee, C.H. CrowdQuake: A networked system of low-cost sensors for earthquake detection via deep learning. In Proceedings of the 26th ACM SIGKDD International Conference on Knowledge Discovery & Data Mining, Virtual Event, 6–10 July 2020; pp. 3261–3271. [Google Scholar]
- Wu, A.; Lee, J.; Khan, I.; Kwon, Y.W. CrowdQuake+: Data-driven Earthquake Early Warning via IoT and Deep Learning. In Proceedings of the 2021 IEEE International Conference on Big Data (Big Data), Orlando, FL, USA, 15–18 December 2021; pp. 2068–2075. [Google Scholar]
- Fischer, J.; Kühnlenz, F.; Ahrens, K.; Eveslage, I. Model-based Development of Self-organizing Earthquake Early Warning Systems. Simul. Notes Eur. 2009, 19, 9–20. [Google Scholar] [CrossRef]
- Lee, J.; Khan, I.; Choi, S.; Kwon, Y.W. A smart iot device for detecting and responding to earthquakes. Electronics 2019, 8, 1546. [Google Scholar] [CrossRef] [Green Version]
- Boccadoro, P.; Montaruli, B.; Grieco, L.A. Quakesense, a LoRa-compliant earthquake monitoring open system. In Proceedings of the 2019 IEEE/ACM 23rd International Symposium on Distributed Simulation and Real Time Applications (DS-RT), Cosenza, Italy, 7–9 October 2019; pp. 1–8. [Google Scholar]
- Anderson, D.P. Boinc: A system for public-resource computing and storage. In Proceedings of the Fifth IEEE/ACM International Workshop on Grid Computing, Pittsburgh, PA, USA, 8 November 2004; pp. 4–10. [Google Scholar]
- Crisnapati, P.N.; Wulaning, P.D.; Hendrawan, I.N.R.; Bandanagara, A.A.K.B. Earthquake Damage Intensity Scaling System based on Raspberry Pi and Arduino Uno. In Proceedings of the 2018 6th International Conference on Cyber and IT Service Management (CITSM), Parapat, Indonesia, 7–9 August 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Kumar, A.; Sharma, A. Internet of Life (IOL). In Proceedings of the International Conference of Advance Research and Innovation (ICARI-2015), Istanbul, Turkey, 27–31 July 2015. [Google Scholar]
- OpenStreetMap Contributors. Planet Dump. 2017. Available online: https://planet.osm.org and https://www.openstreetmap.org (accessed on 2 February 2022).
- Dierks, T.; Allen, C. The TLS Protocol Version 1.0; RFC 2246; IETF: Fremont, CA, USA, 1999. [Google Scholar]
- Cuomo, F.; Campo, M.; Caponi, A.; Bianchi, G.; Rossini, G.; Pisani, P. EXPLoRa: Extending the performance of LoRa by suitable spreading factor allocations. In Proceedings of the 2017 IEEE 13th International Conference on Wireless and Mobile Computing, Networking and Communications (WiMob), Rome, Italy, 9–11 October 2017; pp. 1–8. [Google Scholar]
- Cuomo, F.; Campo, M.; Bassetti, E.; Cartella, L.; Sole, F.; Bianchi, G. Adaptive mitigation of the Air-Time pressure in LoRa multi-gateway architectures. In Proceedings of the EuropeanWireless 2018; 24th EuropeanWireless Conference, Catania, Italy, 2–4 May 2018; pp. 1–6. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| EEW Message Content | Description |
|---|---|
| Timestamp | Timestamp of the detection |
| Origin Location | Location coordinates of the detector which originated the message |
| Signal Data | Accelerometric samples |
| Raspberry Pi | ||||
|---|---|---|---|---|
| 2B | 3B | 3B+ | 4 | |
| CPU | BCM2836 | BCM2837 | BCM2837 | BCM2711 |
| 4 × Cortex-A7 | 4 × Cortex-A53 | 4 × Cortex-A53 | 4 × Cortex-A72 | |
| 900 MHz | 1.2 GHz | 1.4 GHz | 1.5 GHz | |
| RAM | 1 GB | 1 GB | 1 GB | 4 GB |
| Disk | 64 GB SD | 64 GB SD | 64 GB SD | 64 GB SD |
| Wi-Fi | - | 2.4 GHz | 2.4/5 GHz | 2.4/5 GHz |
| Ethernet | Fast Ethernet | Fast Ethernet | Gigabit | Gigabit |
| GPIO | 40 pin | 40 pin | 40 pin | 40 pin |
| NodeMCU | |
|---|---|
| CPU | 106Micro |
| L106 | |
| 160 MHz | |
| RAM | 128 kBytes |
| Disk | 4 MBytes |
| Wi-Fi | 2.4 GHz |
| Ethernet | - |
| GPIO | 13 pin |
| Raspberry Pi | Average Time | Standard Deviation | 90-Percentile |
|---|---|---|---|
| 2B | 27.19 ms | 1.61 ms | 28.73 ms |
| 3B | 27.78 ms | 5.36 ms | 30.74 ms |
| 3B+ | 22.44 ms | 4.29 ms | 24.59 ms |
| 4 | 7.84 ms | 0.41 ms | 8.37 ms |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bassetti, E.; Panizzi, E. Earthquake Detection at the Edge: IoT Crowdsensing Network. Information 2022, 13, 195. https://doi.org/10.3390/info13040195
Bassetti E, Panizzi E. Earthquake Detection at the Edge: IoT Crowdsensing Network. Information. 2022; 13(4):195. https://doi.org/10.3390/info13040195
Chicago/Turabian StyleBassetti, Enrico, and Emanuele Panizzi. 2022. "Earthquake Detection at the Edge: IoT Crowdsensing Network" Information 13, no. 4: 195. https://doi.org/10.3390/info13040195