
An Exact Algorithm for Task Allocation of Multiple Unmanned Surface Vehicles with Minimum Task Time


Abstract
:1. Introduction
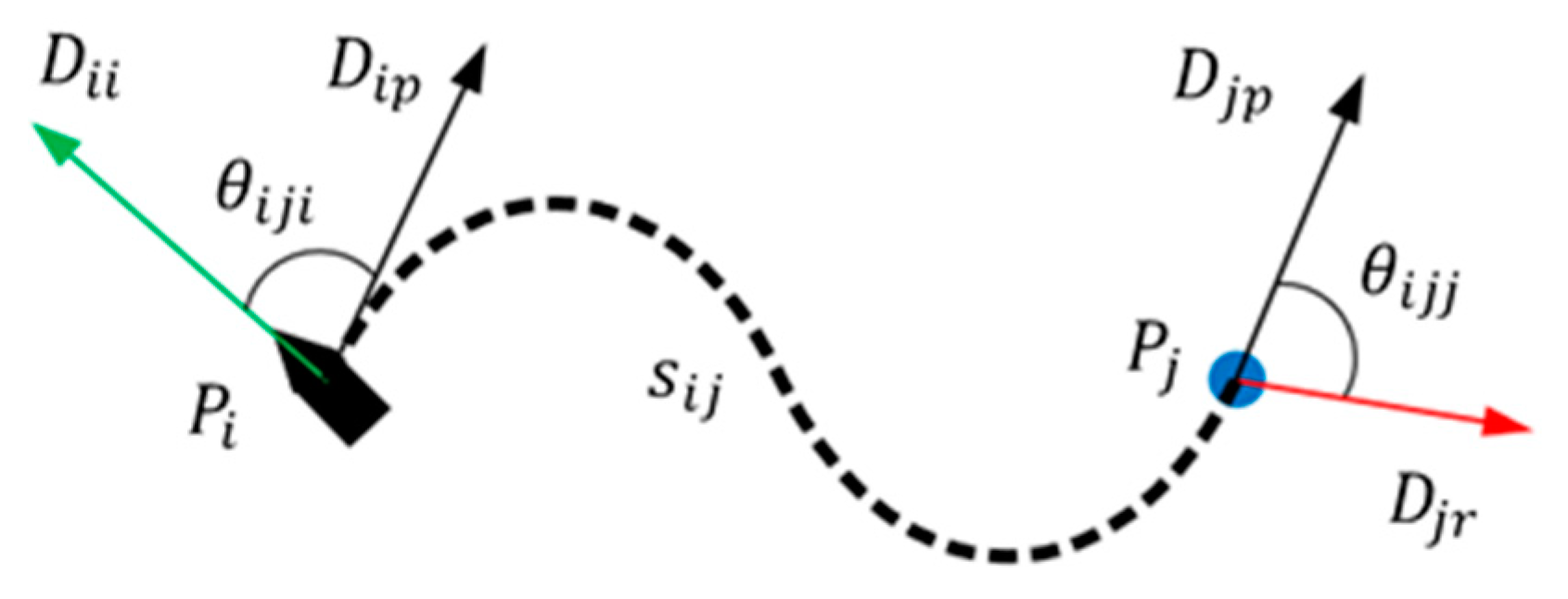
2. Model
3. Method
3.1. Cost Matrix
3.2. Exact Algorithm
| Algorithm 1 Minimize the max cost and reduce the total cost | |
| Input: The cost matrix based on Section 3.1. Output: the best solution. | |
| Step 1 | Each element in the cost matrix is added with different small multi-digit random decimals which do not affect the ascending order of the elements. |
| Step 2 | In ascending order, each element of the cost matrix is filled in the zero matrix with the same order as the cost matrix. The filling position is the same as the original position in the cost matrix. |
| Step 3 | The rank of the matrix is detected when each element is filled into the matrix. When the matrix is just full rank, stop filling the elements, replace the zero elements in the matrix with positive infinity and obtain the solution by the Hungarian algorithm. |
| Algorithm 2 The Hungarian algorithm for task allocation | |
| Step 1 | Subtract the smallest element in each row from all the elements of its row. |
| Step 2 | Subtract the smallest element in each column from all the elements of its column. |
| Step 3 | Draw lines through appropriate rows and columns so that all the zero elements of the cost matrix are covered, and the minimum number of such lines is used. |
| Step 4 | Test for optimality: (i) if the minimum number of covering lines is n, an optimal assignment of zeros is possible and the algorithm is finished. (ii) If the minimum number of covering lines is less than n, an optional assignment of zeros is not yet possible. In that case, proceed to Step 5. |
| Step 5 | Determine the smallest element not covered by any line. Subtract this entry from each uncovered row, and then add it to each covered column. Return to Step 3. |
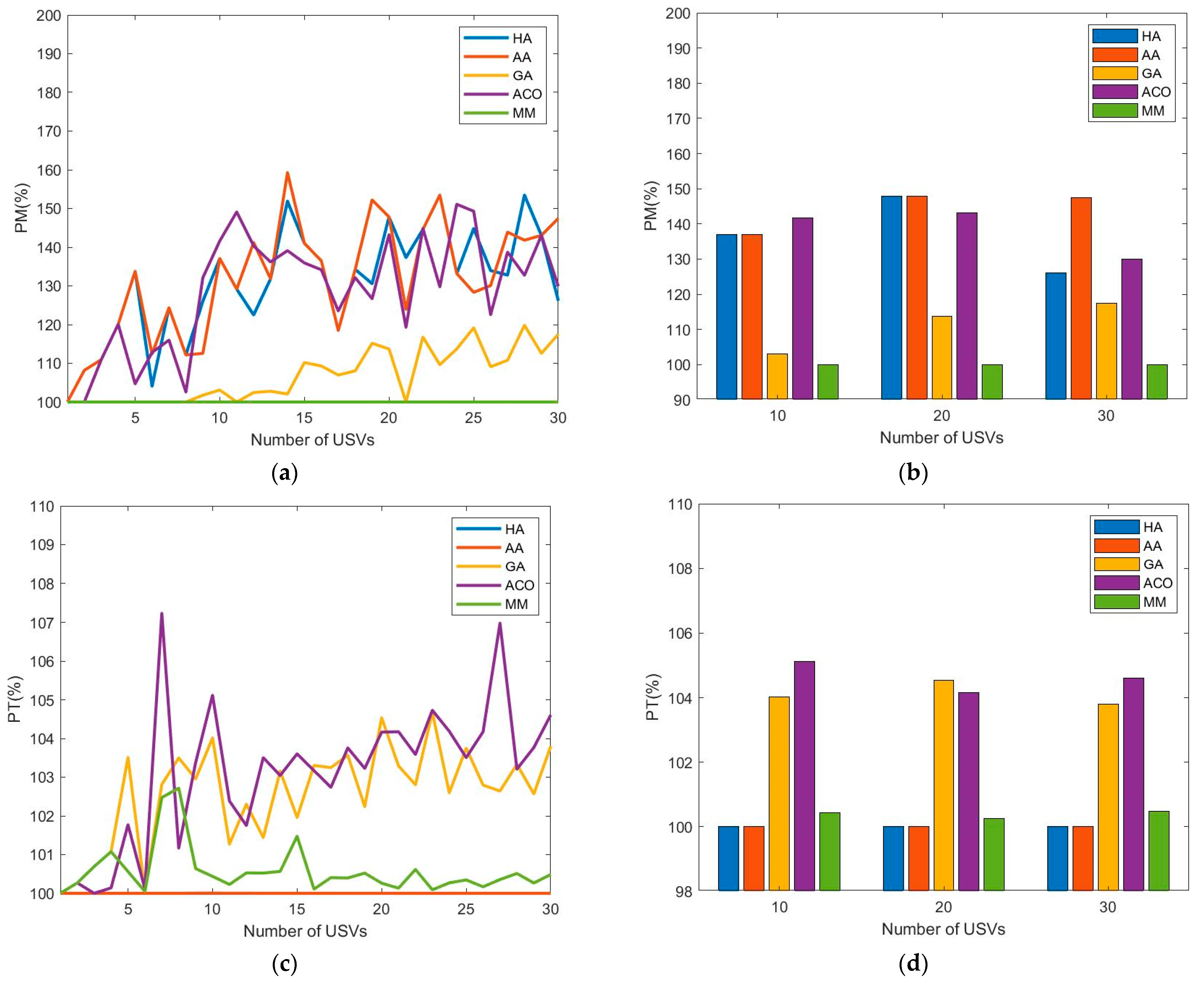
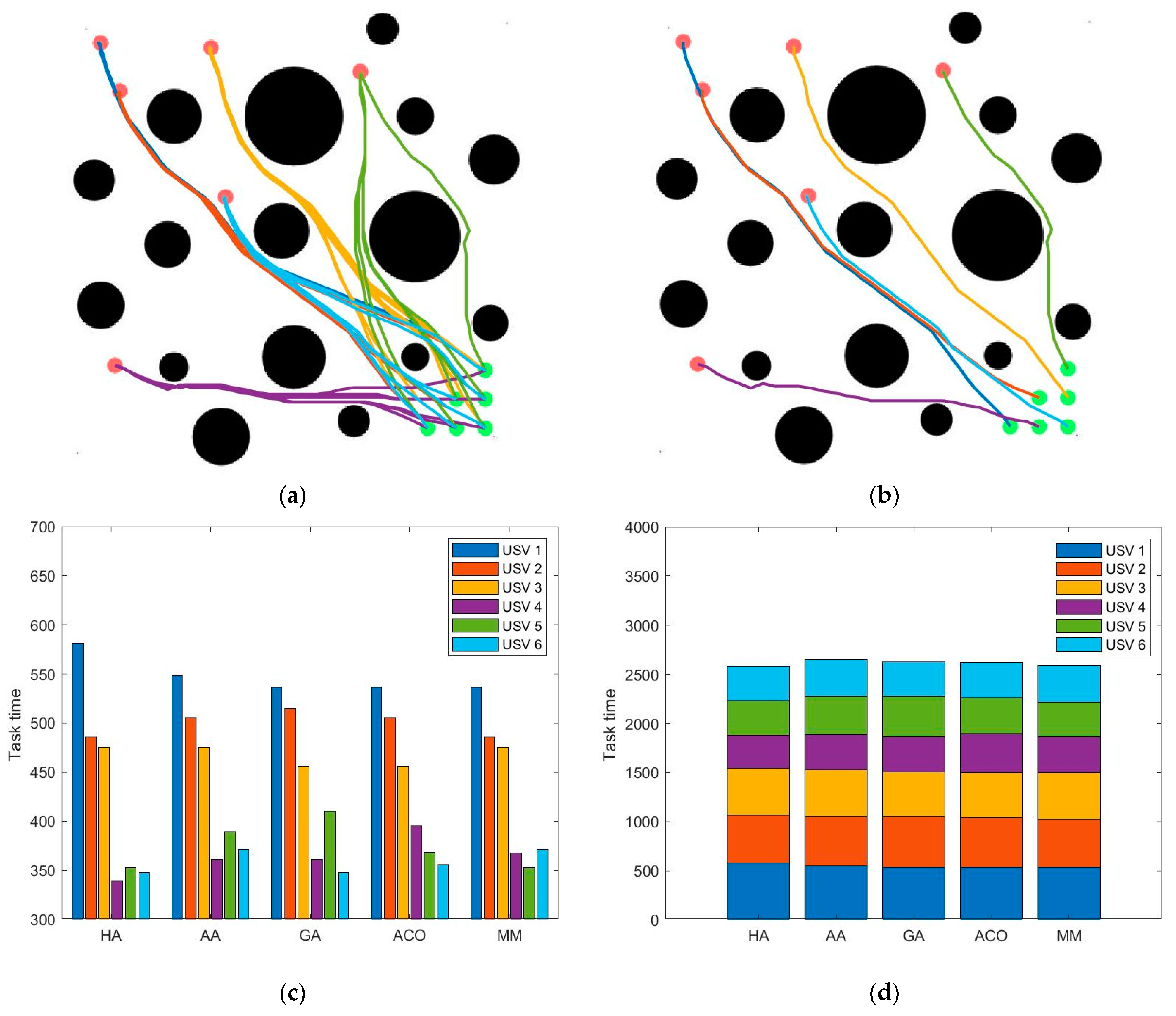
4. Experiments and Discussions
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Sousa, D.; Hernandez, D.; Oliveira, F.; Luís, M.; Sargento, S. A Platform of Unmanned Surface Vehicle Swarms for Real Time Monitoring in Aquaculture Environments. Sensors 2019, 19, 22. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Luo, S.C.; Singh, Y.; Yang, H.Y.; Bae, J.H.; Dietz, J.E.; Diao, X.; Min, B.-C. Image Processing and Model-Based Spill Coverage Path Planning for Unmanned Surface Vehicles. In Proceedings of the Oceans 2019 Mts/IEEE Seattle, Seattle, WA, USA, 27–31 October 2019; IEEE: New York, NY, USA, 2019. [Google Scholar]
- Bae, J.H.; Luo, S.C.; Kannan, S.S.; Singh, Y.; Lee, B.; Voyles, R.M.; Postigo-Malaga, M.; Zenteno, E.G.; Aguilar, L.P.; Min, B.-C. Development of an Unmanned Surface Vehicle for Remote Sediment Sampling with a Van Veen Grab Sampler. In Proceedings of the Oceans 2019 Mts/IEEE Seattle, Seattle, WA, USA, 27–31 October 2019; IEEE: New York, NY, USA, 2019. [Google Scholar]
- Felski, A.; Zwolak, K. The Ocean-Going Autonomous Ship-Challenges and Threats. J. Mar. Sci. Eng. 2020, 8, 16. [Google Scholar] [CrossRef] [Green Version]
- Jorge, V.A.M.; Granada, R.; Maidana, R.G.; Jurak, D.A.; Heck, G.; Negreiros, A.P.F.; dos Santos, D.H.; Gonçalves, L.M.G.; Amory, A.M. A Survey on Unmanned Surface Vehicles for Disaster Robotics: Main Challenges and Directions. Sensors 2019, 19, 44. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yin, Q.Y.; Lv, Y.Z. Multichannel adaptive deployment and reliable communication design for unmanned surface vessel. Int. J. Adv. Robot. Syst. 2020, 17, 7. [Google Scholar] [CrossRef]
- Rauniyar, A.; Muhuri, P.K. Multi-Robot Coalition Formation Problem: Task Allocation with Adaptive Immigrants Based Genetic Algorithms. In Proceedings of the 2016 IEEE International Conference on Systems, Man, and Cybernetics, Budapest, Hungary, 9–12 October 2016; pp. 137–142. [Google Scholar]
- Liu, Y.C.; Bucknall, R. Efficient multi-task allocation and path planning for unmanned surface vehicle in support of ocean operations. Neurocomputing 2018, 275, 1550–1566. [Google Scholar] [CrossRef]
- Liu, Y.C.; Song, R.; Bucknall, R.; Zhang, X. Intelligent multi-task allocation and planning for multiple unmanned surface vehicles (USVs) using self-organising maps and fast marching method. Inf. Sci. 2019, 496, 180–197. [Google Scholar] [CrossRef]
- Raboin, E.; Svec, P.; Nau, D.S.; Gupta, S.K. Model-predictive asset guarding by team of autonomous surface vehicles in environment with civilian boats. Auton. Robot. 2015, 38, 261–282. [Google Scholar] [CrossRef]
- Nam, C.; Shell, D.A. Robots in the Huddle: Upfront Computation to Reduce Global Communication at Run Time in Multirobot Task Allocation. IEEE Trans. Robot. 2020, 36, 125–141. [Google Scholar] [CrossRef]
- Chopra, S.; Notarstefano, G.; Rice, M.; Egerstedt, M. A Distributed Version of the Hungarian Method for Multirobot Assignment. IEEE Trans. Robot. 2017, 33, 932–947. [Google Scholar] [CrossRef] [Green Version]
- Chen, X.; Zhang, P.; Du, G.; Li, F. Ant Colony Optimization Based Memetic Algorithm to Solve Bi-Objective Multiple Traveling Salesmen Problem for Multi-Robot Systems. IEEE Access 2018, 6, 21745–21757. [Google Scholar] [CrossRef]
- Zhang, H.G.; Luo, H.; Wang, Z.; Liu, Y.; Liu, Y. Multi-Robot Cooperative Task Allocation with Definite Path-Conflict-Free Handling. IEEE Access 2019, 7, 138495–138511. [Google Scholar] [CrossRef]
- Shriyam, S.; Gupta, S.K. Incorporation of Contingency Tasks in Task Allocation for Multirobot Teams. IEEE Trans. Autom. Sci. Eng. 2020, 17, 809–822. [Google Scholar] [CrossRef]
- Nunes, E.; McIntire, M.; Gini, M. Decentralized multi-robot allocation of tasks with temporal and precedence constraints. Adv. Robot. 2017, 31, 1193–1207. [Google Scholar] [CrossRef]
- Kuhn, H.W. The Hungarian Method for the assignment problem. Nav. Res. Logist. 2005, 52, 7–21. [Google Scholar] [CrossRef] [Green Version]
- Nam, C.; Shell, D.A. Assignment Algorithms for Modeling Resource Contention in Multirobot Task Allocation. IEEE Trans. Autom. Sci. Eng. 2015, 12, 889–900. [Google Scholar] [CrossRef]
- Shi, J.K.; Yang, Z.; Zhu, J.W. An auction-based rescue task allocation approach for heterogeneous multi-robot system. Multimed. Tools Appl. 2020, 79, 14529–14538. [Google Scholar] [CrossRef]
- Lusk, P.C.; Cai, X.Y.; Wadhwania, S.; Paris, A.; Fathian, K.; How, J.P. A Distributed Pipeline for Scalable, Deconflicted Formation Flying. IEEE Robot. Autom. Lett. 2020, 5, 5213–5220. [Google Scholar] [CrossRef]
- Gomez, J.V.; Lumbier, A.; Garrido, S.; Moreno, L. Planning robot formations with fast marching square including uncertainty conditions. Robot. Auton. Syst. 2013, 61, 137–152. [Google Scholar] [CrossRef] [Green Version]
- Sethian, J.A. A fast marching level set method for monotonically advancing fronts. Proc. Natl. Acad. Sci. USA 1996, 93, 1591–1595. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liu, Y.C.; Bucknall, R. The angle guidance path planning algorithms for unmanned surface vehicle formations by using the fast marching method. Appl. Ocean. Res. 2016, 59, 327–344. [Google Scholar] [CrossRef] [Green Version]




{kind=link}
{kind=link}
{kind=link}
| (A) | (B) | (C) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xue, K.; Huang, Z.; Wang, P.; Xu, Z. An Exact Algorithm for Task Allocation of Multiple Unmanned Surface Vehicles with Minimum Task Time. J. Mar. Sci. Eng. 2021, 9, 907. https://doi.org/10.3390/jmse9080907
Xue K, Huang Z, Wang P, Xu Z. An Exact Algorithm for Task Allocation of Multiple Unmanned Surface Vehicles with Minimum Task Time. Journal of Marine Science and Engineering. 2021; 9(8):907. https://doi.org/10.3390/jmse9080907
Chicago/Turabian StyleXue, Kai, Zhiqin Huang, Ping Wang, and Zeyu Xu. 2021. "An Exact Algorithm for Task Allocation of Multiple Unmanned Surface Vehicles with Minimum Task Time" Journal of Marine Science and Engineering 9, no. 8: 907. https://doi.org/10.3390/jmse9080907