1. Introduction
In recent years, underwater acoustic technology has been widely used to detect underwater targets [
1], describe underwater overviews [
2], measure hydrological information [
3], and perform other tasks [
4]. Due to the influence of the water surface, water body, water bottom, and other features, sound wave propagation in the ocean presents a complicated distribution state [
5]. According to the principle of ocean acoustic propagation, sound waves of a fixed frequency satisfy the elliptic partial differential Helmholtz equation. The sound pressure results throughout an entire space can be obtained after adding boundary conditions to constrain the Helmholtz equation [
6]. Recently, Wang et al. [
7] used the one-dimensional spectral method to correctly solve the parabolic equation model. Due to the high accuracy and fast convergence speed of the spectral method, it has greatly promoted the development of ocean acoustic calculation. However, there are still some problems in the process of calculation. For example, the beginning of this calculation method solves the simplified parabolic model of the Helmholtz equation. Although simplified models make numerical solutions easier to obtain, their scope of application is very narrow, and approximation errors are introduced. For example, the parabolic equation model replaces the elliptic equation with the parabolic equation. It is thus suitable only for situations in which the physical parameters change slowly with the horizontal distance and the far-field assumption is adopted [
8,
9,
10,
11]. The contribution of the reverse acoustic wave to the full-field wave is ignored, and only the one-way acoustic propagation problem can be solved [
8]. The normal mode model is appropriate only for cases in which the physical parameters are constant, and this model cannot be used to solve problems in which these quantities change with distance, as in actual ocean environments [
12]. The ray model can be applied to high-frequency situations, that is, when the wavelength of the sound wave is significantly smaller than any physical scale in the problems [
6]. The mirror image method uses the superposition of the real sound source point and the mirrored sound source point to obtain the real sound field, but its requirements for sound speed are more stringent; thus, this method can only be used to determine ocean sound fields with a constant sound speed profile [
13]. The wavenumber integration method is suitable only for horizontally layered media and uses numerical integration to determine the sound field [
13]. As a result, the calculated sound does not reflect the real marine environment if the sea area does not meet the constraints of the applied simplified model. Most actual marine environments are relatively complex, and relatively few meet the constraints of various models. Therefore, it is necessary to develop a direct solution to the two-dimensional Helmholtz equation of acoustic propagation without using simplified models.
It is usually difficult to directly solve the partial differential Helmholtz equation’s analytical solution. The finite difference method, finite element method and spectral method are commonly used discrete numerical methods for solving differential equations [
14]. Among them, the finite difference and finite element methods are local approximation methods, and the spectral method is a global approximation method. The finite difference method is the most mature numerical method [
15] and uses the difference quotient instead of the derivative. Its theoretical background and calculation are simple, and its format and structure are flexible. In 2007, a nine-point sixth-order accurate compact finite-difference method for solving the Helmholtz equation was developed and analyzed, but it can only solve the equation with the Neumann boundary condition [
16]. In 2019, Zhu and Zhao proposed a high-order fast algorithm for solving the two-dimensional Helmholtz equation with Dirichlet and Neumann boundary conditions in polar coordinates [
17]. Because the finite difference method has difficulty dealing with the Helmholtz equation with complex boundary conditions, it is commonly used to deal with the simplified partial differential equation of the Helmholtz equation for ocean acoustic propagation. At present, some mature ocean acoustic calculation programs have been developed using the finite difference method, such as RAM [
18] based on the parabolic equation model and Kraken [
19] based on the normal mode model. However, the finite difference method is not flexible enough to address complex boundary value problems in actual applications, and its approximation accuracy is limited by the format itself. Moreover, it is prone to instability. The finite element method decomposes a continuous area into a finite number of interconnected elements that can be polygons or other geometric shapes. This method easily addresses complex problems, but the accuracy of the approximation is also limited by the format itself [
20]. Among the three commonly used numerical methods, the finite difference method and finite element method are both low-precision methods. With continued development of and improvement through scientific research, the study of small-scale and delicate problems has become increasingly important, and high-precision numerical methods have become a research focus of many scholars. The spectral method theoretically has infinite-order approximation accuracy and exponential-order convergence [
21], and the spectral method can obtain high-precision results with a small degree of freedom, unlike the results of the finite difference method and the finite element method.
The classical numerical discrete methods are derived from the weighted residual method (MWR). The MWR linearly expands the solution under a set of trial functions, selects a set of test functions and approximate solutions as inner products, and finally forces the residual to zero. The spectral method is different from other numerical calculation methods, mainly in the selection of a class of globally smooth function clusters as trial functions and test functions. Commonly used function clusters include Chebyshev polynomials [
22], Legendre polynomials [
23], and Fourier functions [
24]. The test function clusters are mainly divided into Galerkin, Tau and collocation types. Among them, the Galerkin and Tau types require that the trial function and test function are exactly the same, and the collocation type requires that the boundary conditions are met at the preselected grid points (i.e., collocation points). The name of each spectral method is described as an “A–B” type, where A is the type of trial function, such as Chebyshev, Legendre or Fourier, and B is the classification of the test function, such as Galerkin or collocation. Commonly used spectral methods include the Chebyshev–Galerkin spectral method and Chebyshev–collocation spectral method. In the 1980s, studies by Quartreroni, Canuto, Guo Benyu and others showed that the spectral method has infinite-order convergence, and the spectral method was applied to solve partial differential equations. Since then, the spectral method has been widely used to solve mathematical and physical problems [
25,
26,
27,
28,
29,
30]. The spectral method also has obvious advantages in solving atmospheric circulation problems [
31]. In terms of the numerical eddy flow problem, the spectral method can be used to calculate the fluid flow in a straight channel, and the calculated laminar flow and turbulent flow results are in good agreement with the theoretical results [
32]. The step-by-step pseudospectral method is used in the calculation of the water wave motion problem, and the pseudospectral method is established to numerically solve the two-dimensional tidal wave equation calculation model. As a result, the water wave motion caused by the perturbation of the water column of a uniform square pool is simulated and calculated [
33]. In recent years, some scholars have begun to apply the spectral method to acoustic problems. Wise et al. [
34] used the Fourier–collocation method to re-express the distribution of arbitrary sound sources and sensors, Wang et al. [
35] proposed an improved sound propagation operator expansion scheme based on the spectral method, and Lan et al. [
36] introduced an algorithm based on the spectral collocation method and were the first to explained the basic governing equations. In the calculation of ocean acoustics, Evans et al. [
37] proposed a Legendre–Galerkin spectral method to solve the differential eigenvalue problem of complex and discontinuous coefficients in ocean acoustics.
In recent years, many scholars have studied direct solutions of two-dimensional partial differential equations using the spectral method. In 1995, Shen [
38] used the Chebyshev–Galerkin spectral method to directly solve the two-dimensional Helmholtz equation with Dirichlet and Neumann boundary conditions, which achieved good results. In 2009, Wang et al. [
39] used the Chebyshev-Tau and Chebyshev–Galerkin spectral methods to solve the two-dimensional Poisson equation. In 2019, Sahuck [
40] successfully used the Chebyshev–Galerkin spectral method and quasi-inverse technique to directly solve the two-dimensional Poisson equation and Helmholtz equation with Dirichlet boundary conditions.
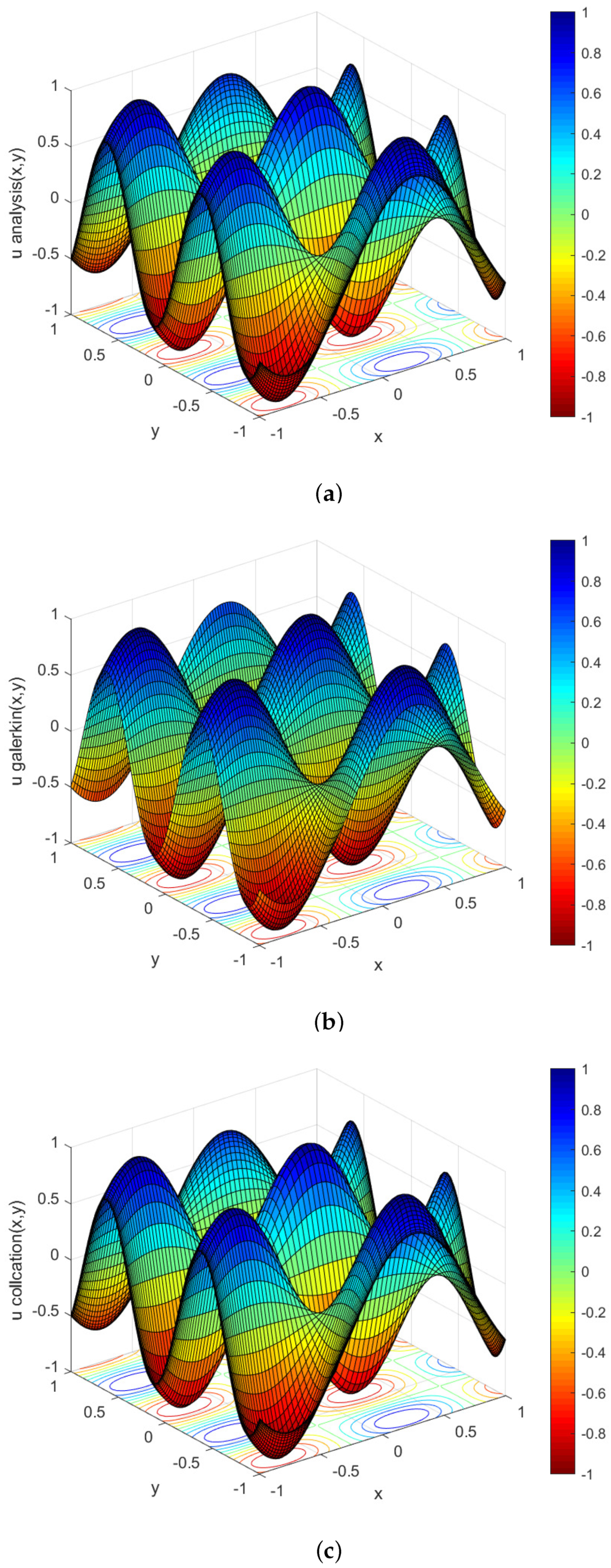
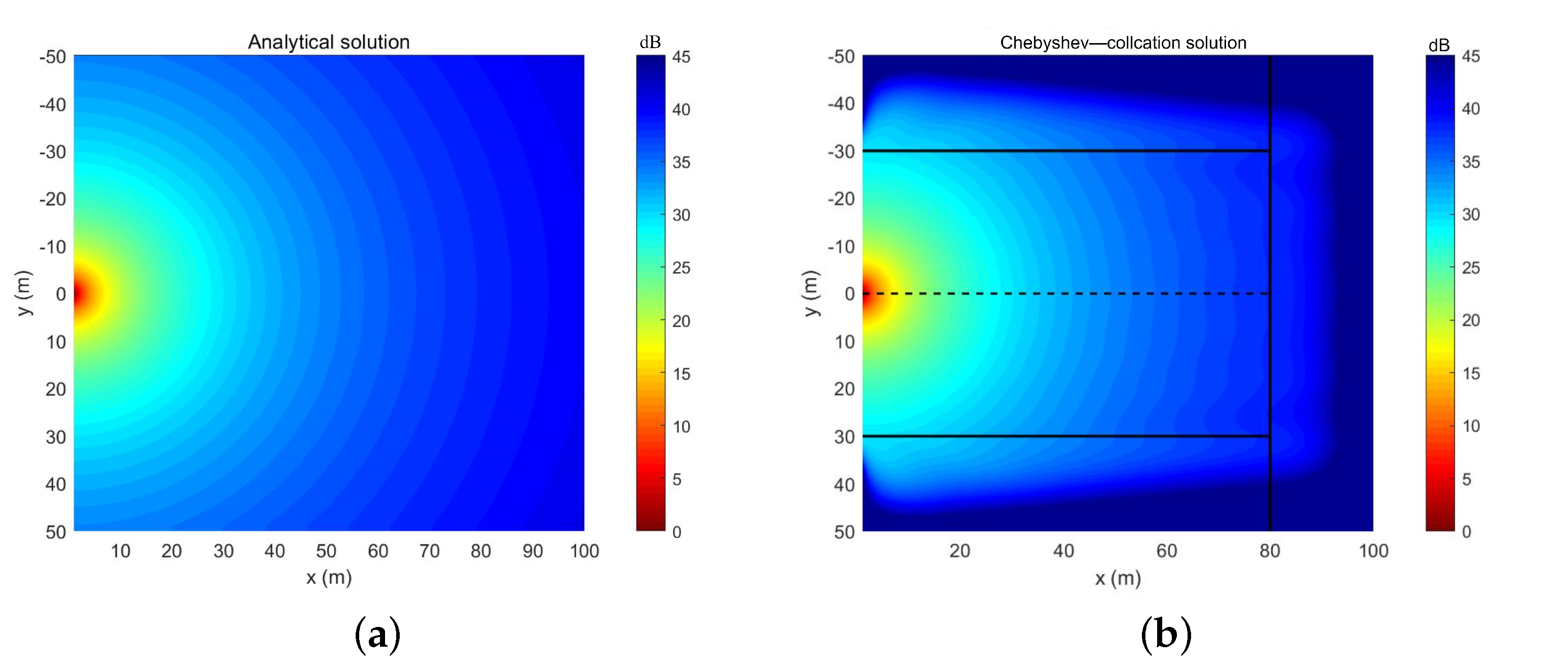
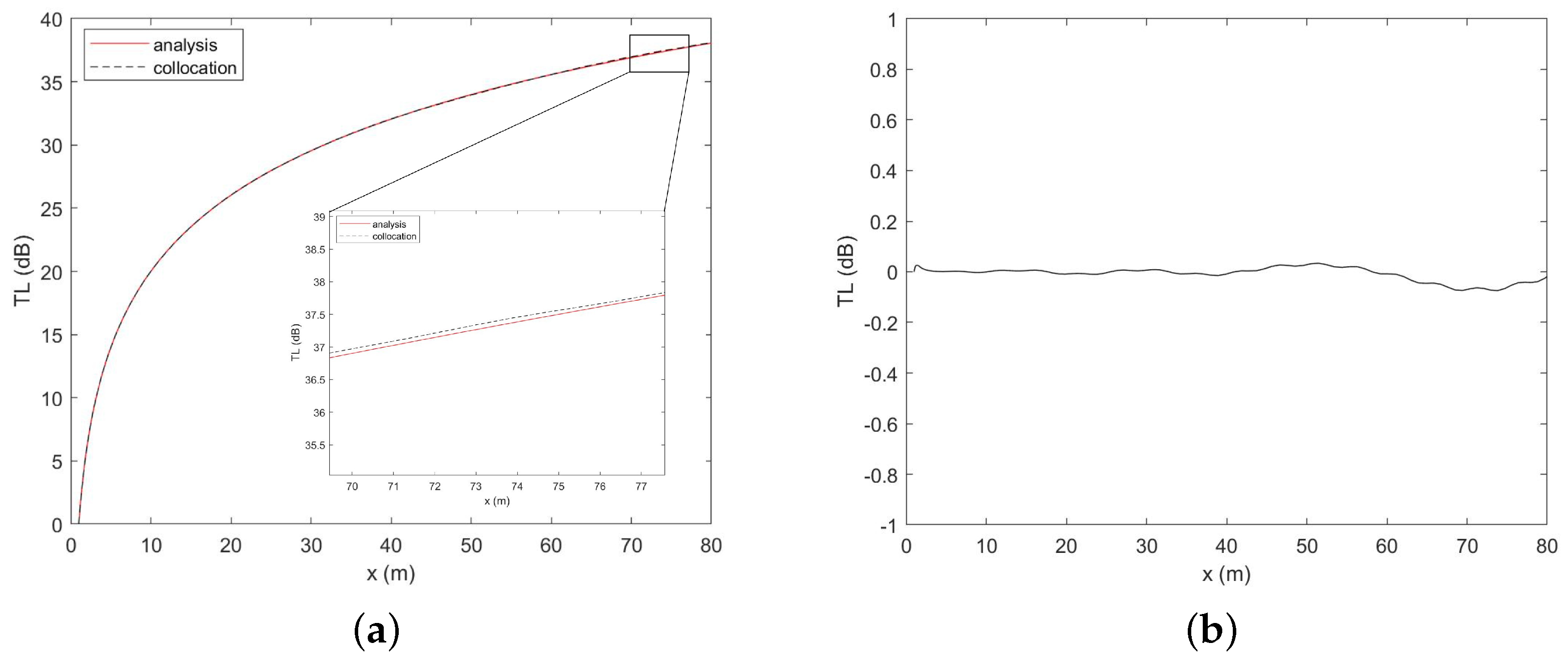
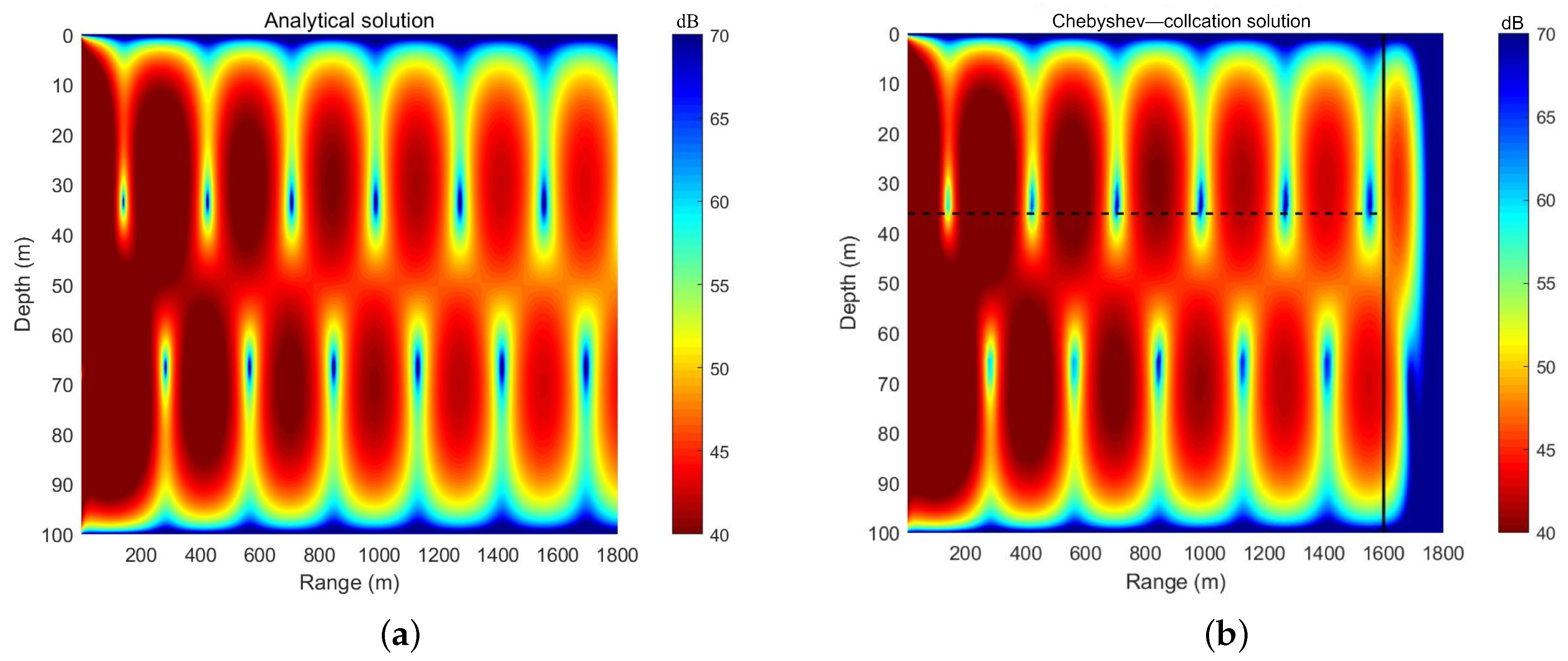
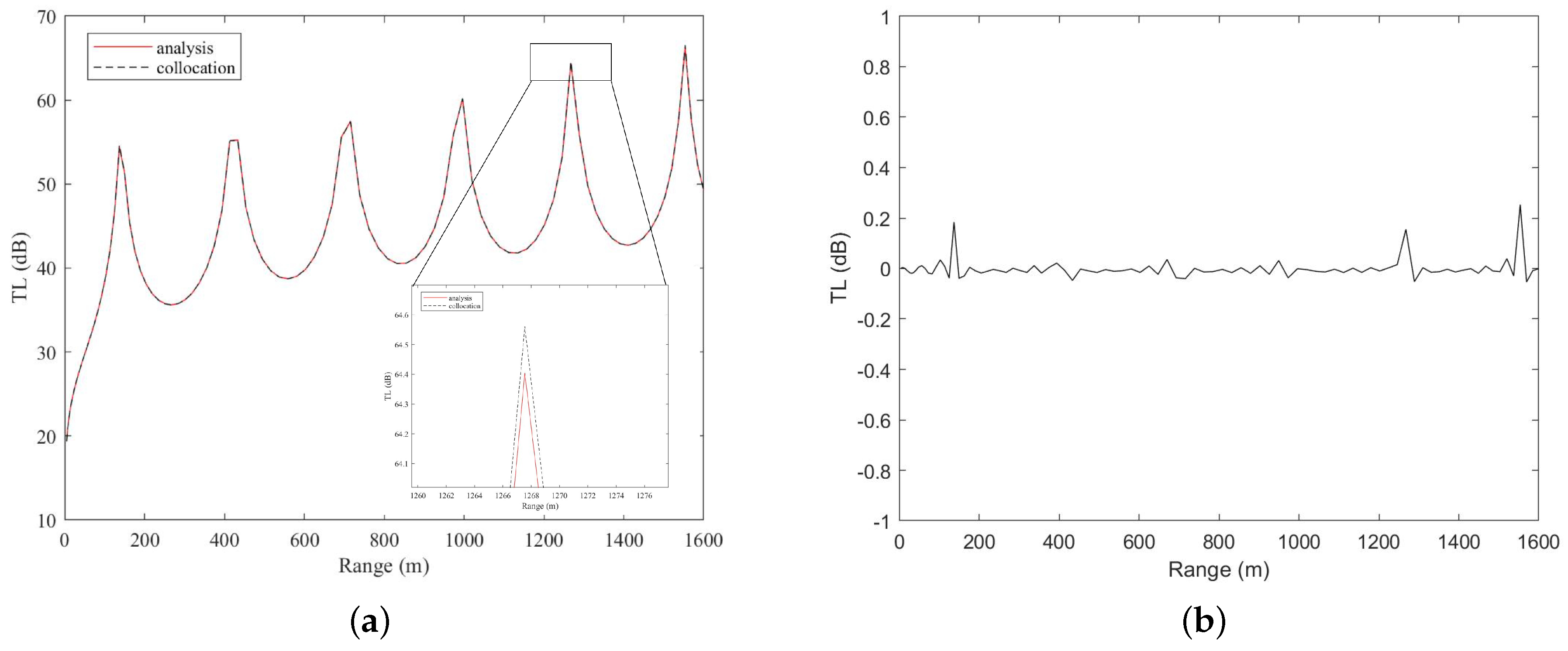
In this paper, the Chebyshev–Galerkin and Chebyshev–collocation spectral methods are used to directly solve the two-dimensional Helmholtz equation with Robin boundary conditions, and the results are compared with those of the corresponding analytical solutions. Because the Chebyshev–Galerkin spectral method requires trial functions to meet the boundary conditions, its boundary condition requirements are more stringent. In consideration of the complicated boundary conditions of the actual marine environment, the Chebyshev–collocation spectral method is used to solve the Helmholtz equation of two-dimensional ocean acoustic propagation. Similarly, the correctness of the method is verified by analytical solutions for an example of ocean acoustic propagation. Upon comparing the numerical calculation results of the collocation method with those of Kraken, the results show that the calculation accuracy of the collocation method is higher than that of Kraken. Therefore, it is feasible to use the spectral method to directly solve two-dimensional ocean acoustic propagation problems. The spectral method does not utilize simplified models, so there are no restrictions on the application conditions; thus, no approximation errors are introduced by the model. This method has a wide range of applications, high calculation accuracy, and high practical application value.
This paper is composed as follows. In
Section 1, we introduce the current situation and main problems of ocean acoustic field solutions. Then, the Chebyshev–Galerkin and Chebyshev–collocation spectral methods are explained in
Section 2 by applying them to solve the Helmholtz equation. In
Section 3, we apply our method to the Helmholtz model equation and ocean acoustic program examples and analyze the results of the numerical calculations. Our conclusions are described in
Section 4.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}