
Coupled Flow-Seepage-Elastoplastic Modeling for Competition Mechanism between Lateral Instability and Tunnel Erosion of a Submarine Pipeline



Abstract
:1. Introduction
2. A Coupled flow-seepage-elastoplastic Model
2.1. Governing Equations
2.1.1. Flow over a Partially Embedded Pipe
2.1.2. Seepage Flow within the Soil
2.1.3. Elastoplastic Behavior of the Soil
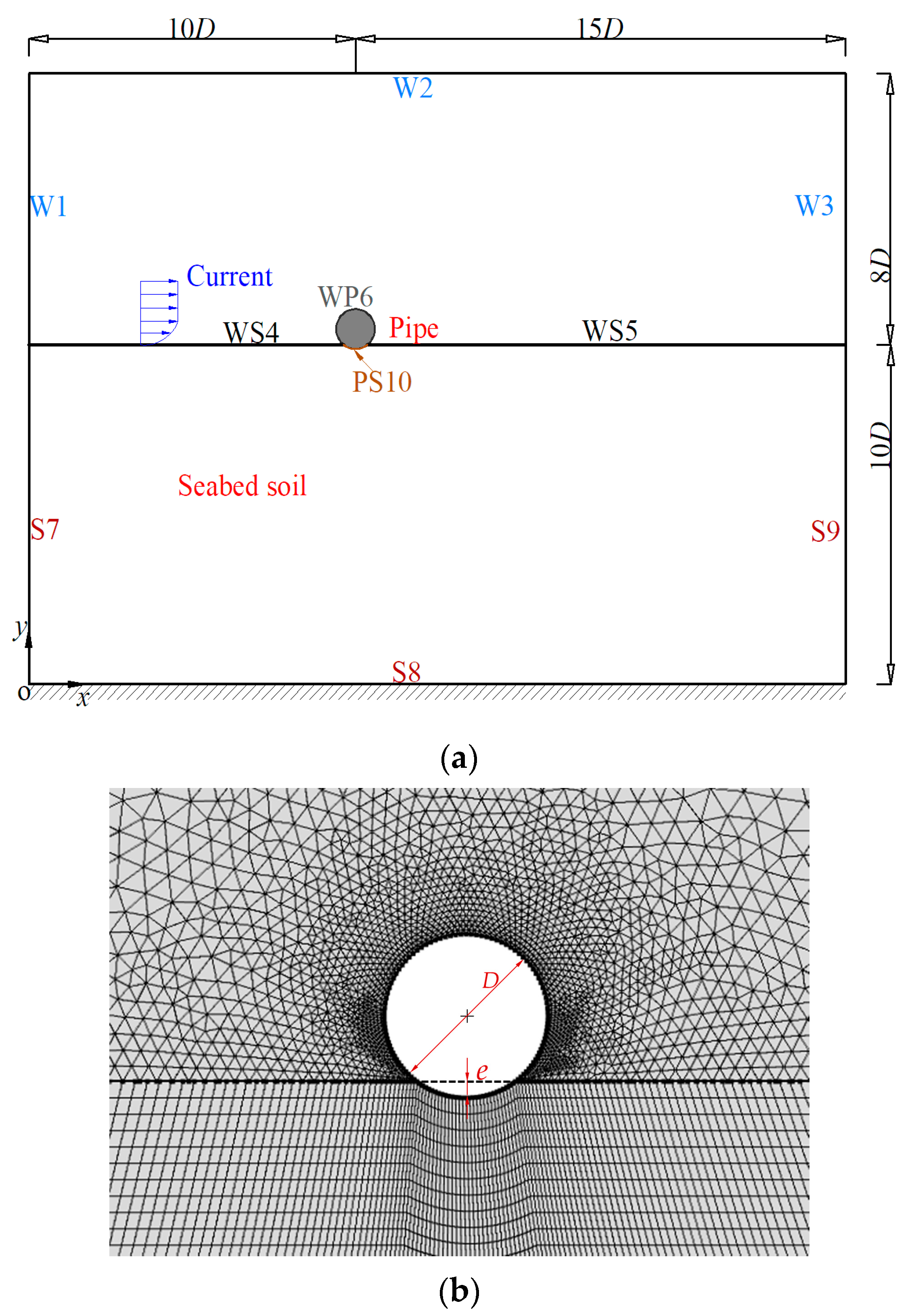
2.2. Geometry and Computational Meshes
2.3. Boundary Conditions and Properties of Materials
2.3.1. Boundary Conditions
- W1 (the inlet of the water domain): a constant undisturbed flow velocity was specified. The inlet value for the turbulent kinetic energy and dissipation could be evaluated with , , in which turbulent intensity and turbulence length scale [41].
- W2 (the top of the water domain): a no-flow symmetry boundary was set at y = 18D.
- W3 (the outflow boundary): the pressure was given a reference value p = 0, whereas the other flow variables (velocity, turbulent kinetic energy, dissipation) were allowed to adjust freely with zero x-gradient conditions. The suppressed backflow was selected to prevent fluid from entering the domain through the boundary.
- WS4, WS5 (the water–seabed interface at the left and right of the pipe): the logarithmic wall function [42] was implemented; The effective normal stress and the shear stress vanished: ; and the excess pore pressure was equal to the water pressure of the flow field at the surface of the seabed: .
- WP6 (the pipe–water interface): no flow through the impermeable wall of the pipe (i.e., ); similar to WS4 and WS5, the logarithmic wall function was implemented at the pipe–water interface.
- S7, S9 (the left and the right lateral boundaries of the soil domain): no seepage was induced at the lateral boundaries: ; and the normal displacement was set as zero: .
- S8 (the bottom of the soil domain): an impermeable fixed bottom was set at y = 0; i.e., zero displacement: ; and no vertical seepage: .
- PS10 (the pipe–soil interface): the wall of the pipe was assumed to be impermeable, and there was no pore pressure gradient at the pipe surface: . Both the rolling and the sliding motions of the pipe were permitted for the freely laid pipe.
- A contact-pair algorithm was adopted to describe the pipe–soil interfacial behavior [40]. The pipe and seabed surface were assigned as the source and destination boundaries in the contact pair, respectively. Hard contact was chosen for the normal contact, and normal tensile stress was not allowed along the pipe–soil interface. When the pipe–soil contact surface was closed, it conveyed tangential stress. The Coulomb friction theory was used for the interfacial tangent contact. The pipe and the soil in the contact pair adhered to each other if the frictional shear stress (τ) was less than the critical one (τcrit). Once τcrit was exceeded, slippage along the interface occurred. In the Coulomb friction model, the friction coefficient () is defined as , where is the friction angle of the pipe–soil interface. The value of generally ranges from 0.5 to 1.0 of the soil friction angle φ, depending on the interface characteristics and relative movement between the pipe and the soil [43]. For a smooth pipe on a sandy seabed, a value of = 0.58 was herein considered, thus = 0.37 was adopted in the present numerical simulations.
2.3.2. Properties of Materials
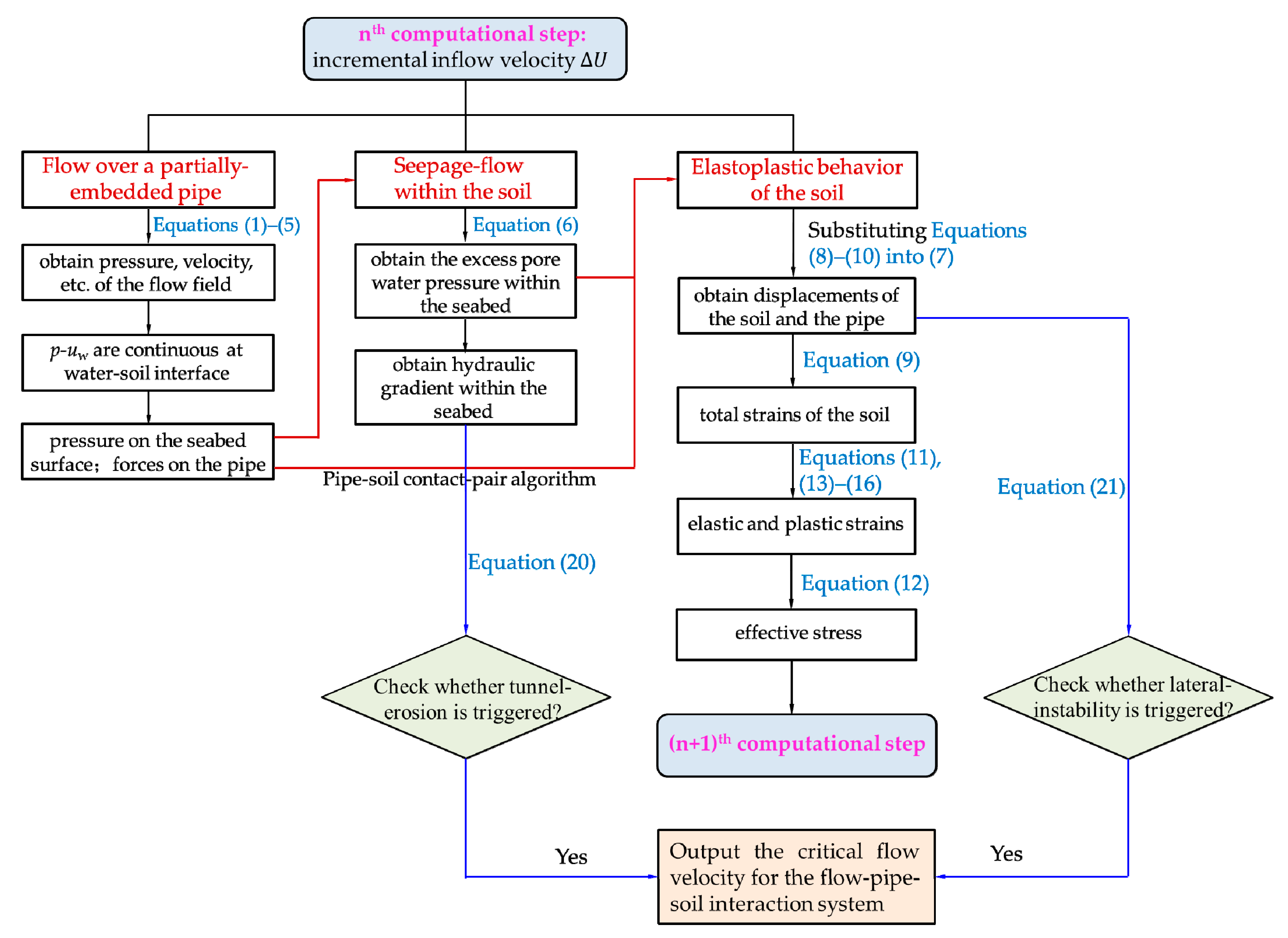
2.4. Coupling Algorithm
- Firstly, the responsibility of the flow field over the pipe (Equations (1)–(5)) in one computational step was to determine the pressure around the pipe, and to provide pressure/force acting on the seabed and structures as a surface boundary condition for the geotechnical simulations. As such, the continuity of the water–soil interface pressure (p-uw) in every computational step was ensured, and the one-way coupling of flow and seepage fields could be implemented.
- Then, by solving the continuity equation (Equation (6)), the pore pressure could be obtained. Substituting the Terzaghi’s effective stress principle (Equation (8)), the relationship between total strain and displacement (Equation (9)), and the elastoplastic constitutive model (Equation (10)) into the stress balance equation (Equation (7)), the governing equation for soil deformation with the unknown variables of soil displacement and pore water pressure could be solved through iterative computation.
- Concurrently, the soil’s total strain, and its elastic and plastic components, could be calculated with the deformation continuity condition (Equation (9)) together with the yield function and the flow rule (Equations (13)–(16)). Based on the constitutive model (Equation (12)), the effective stress within the soil around the partially embedded pipe could be acquired.
- Based on the criteria for the lateral instability and tunnel erosion of the pipe (Equations (20) and (21) in Section 4.2), we could then examine whether the two instability modes were triggered.
3. Verification of Numerical Model
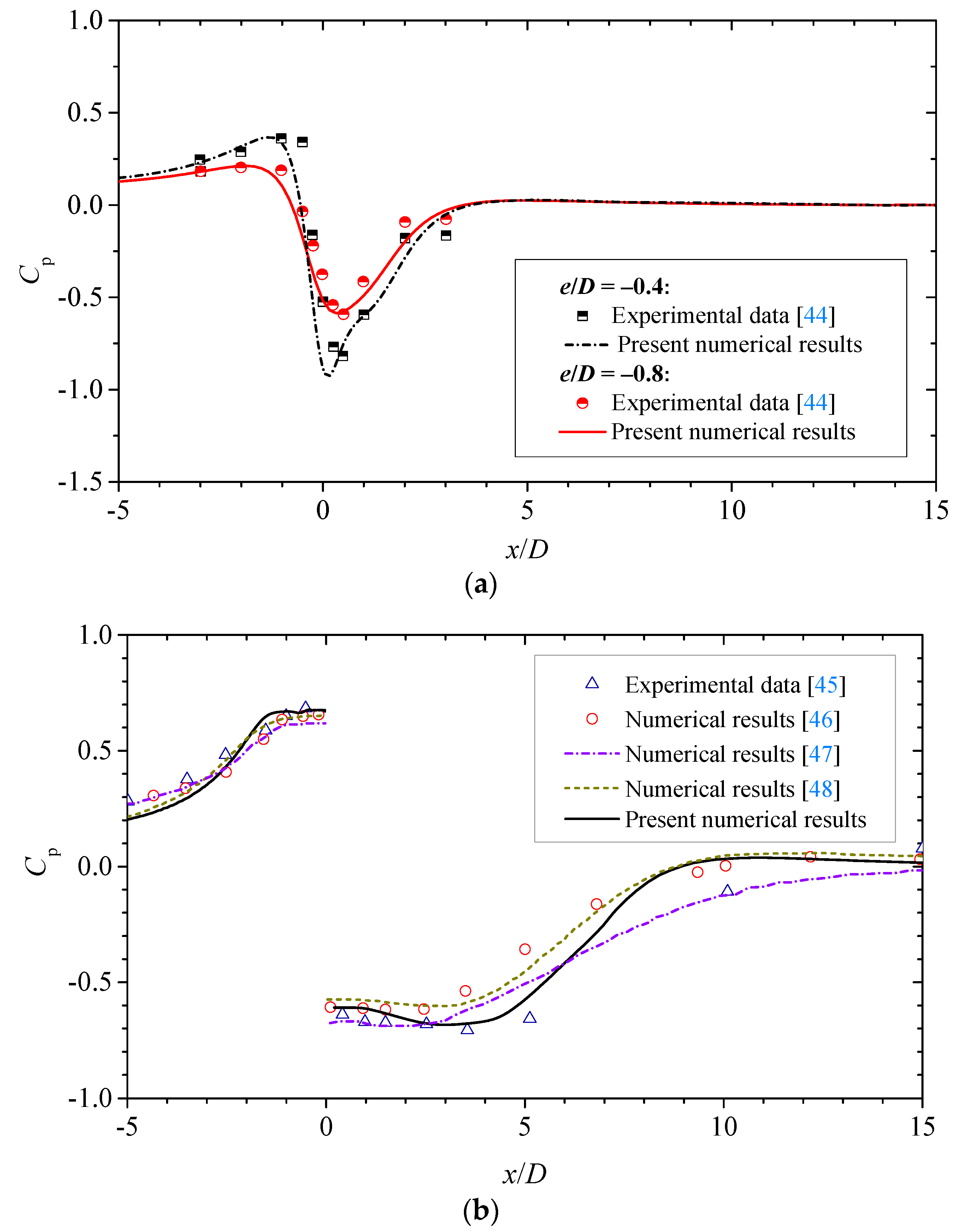
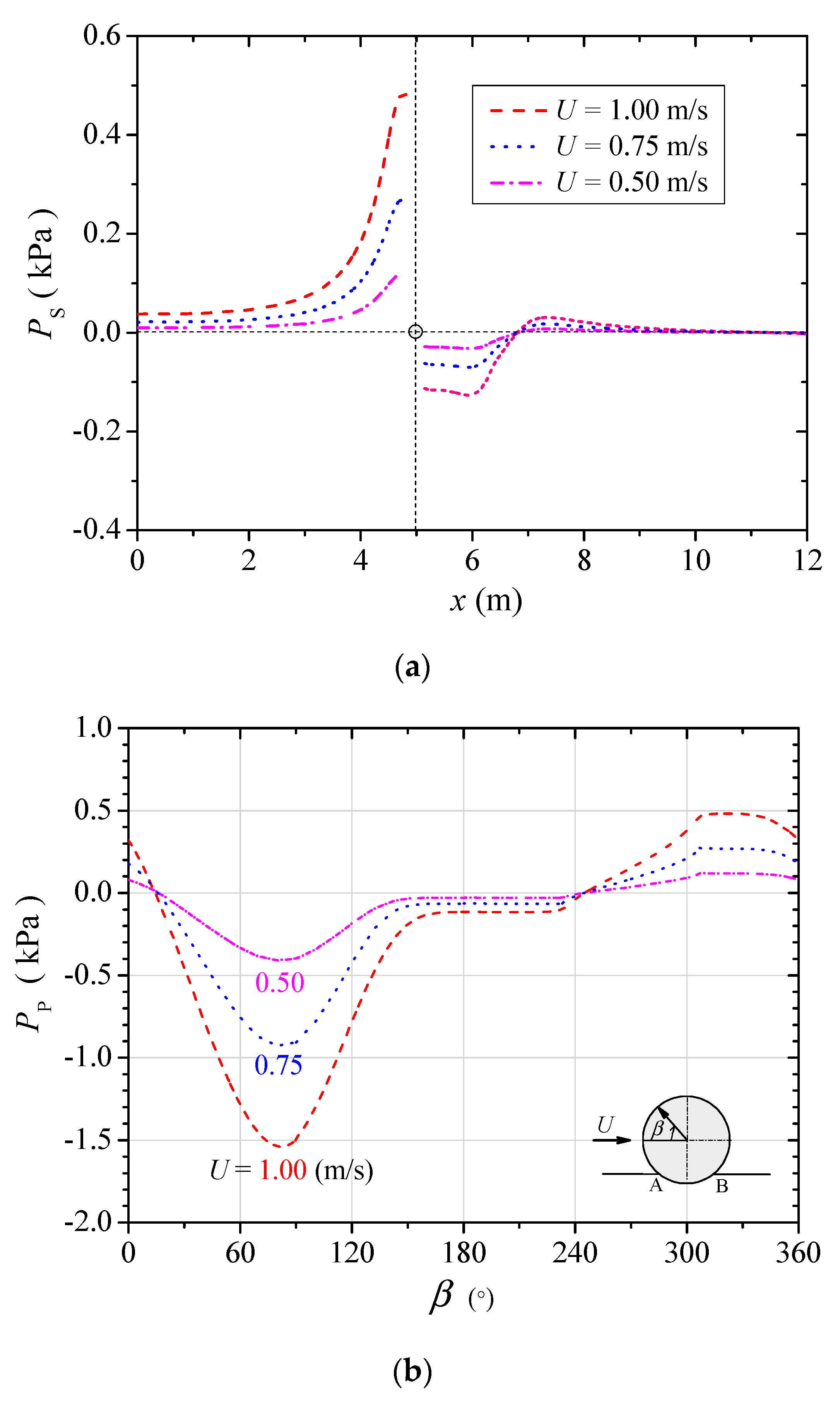
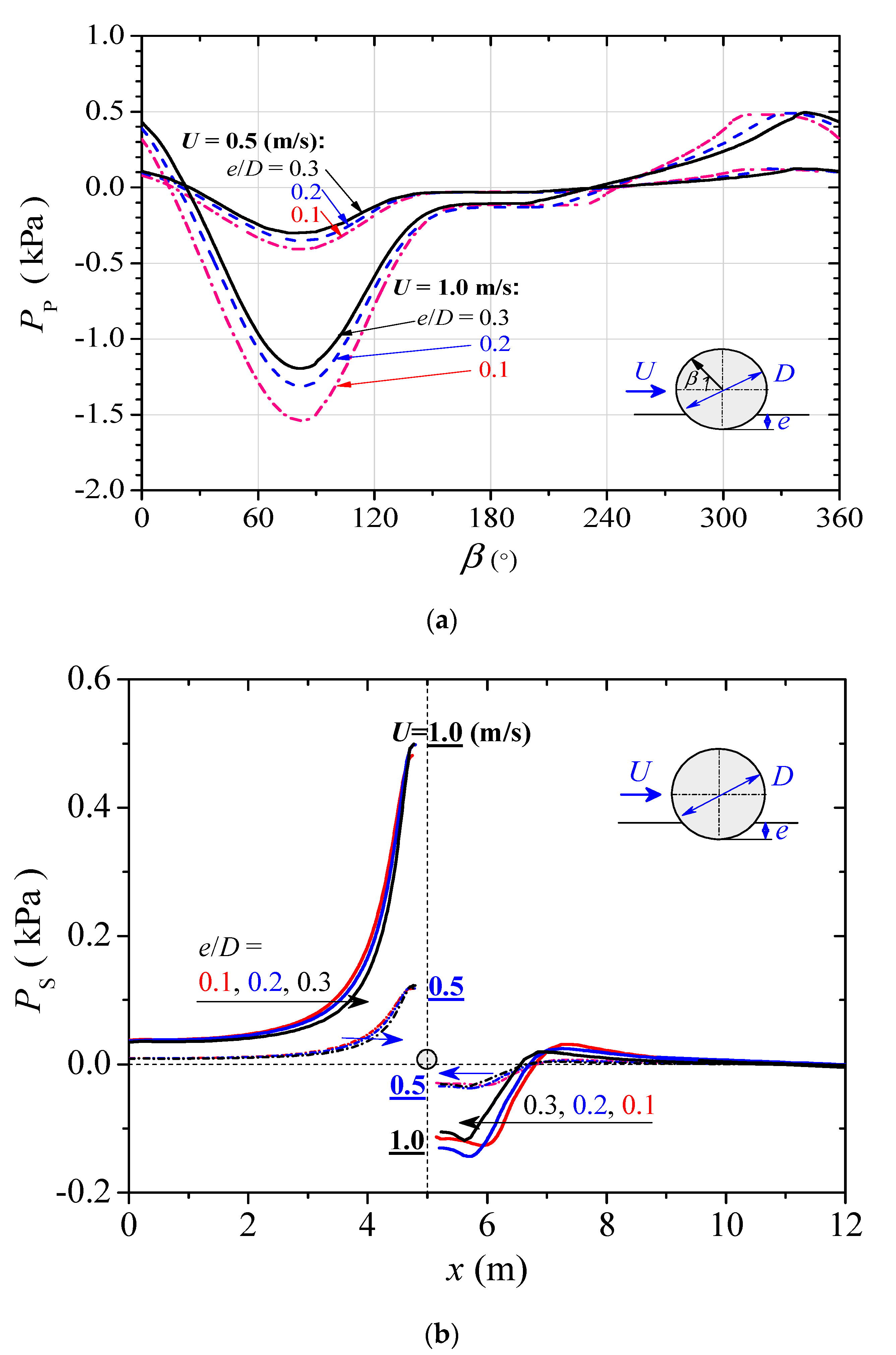
3.1. Pressure Distribution at the Mudline near the Pipe
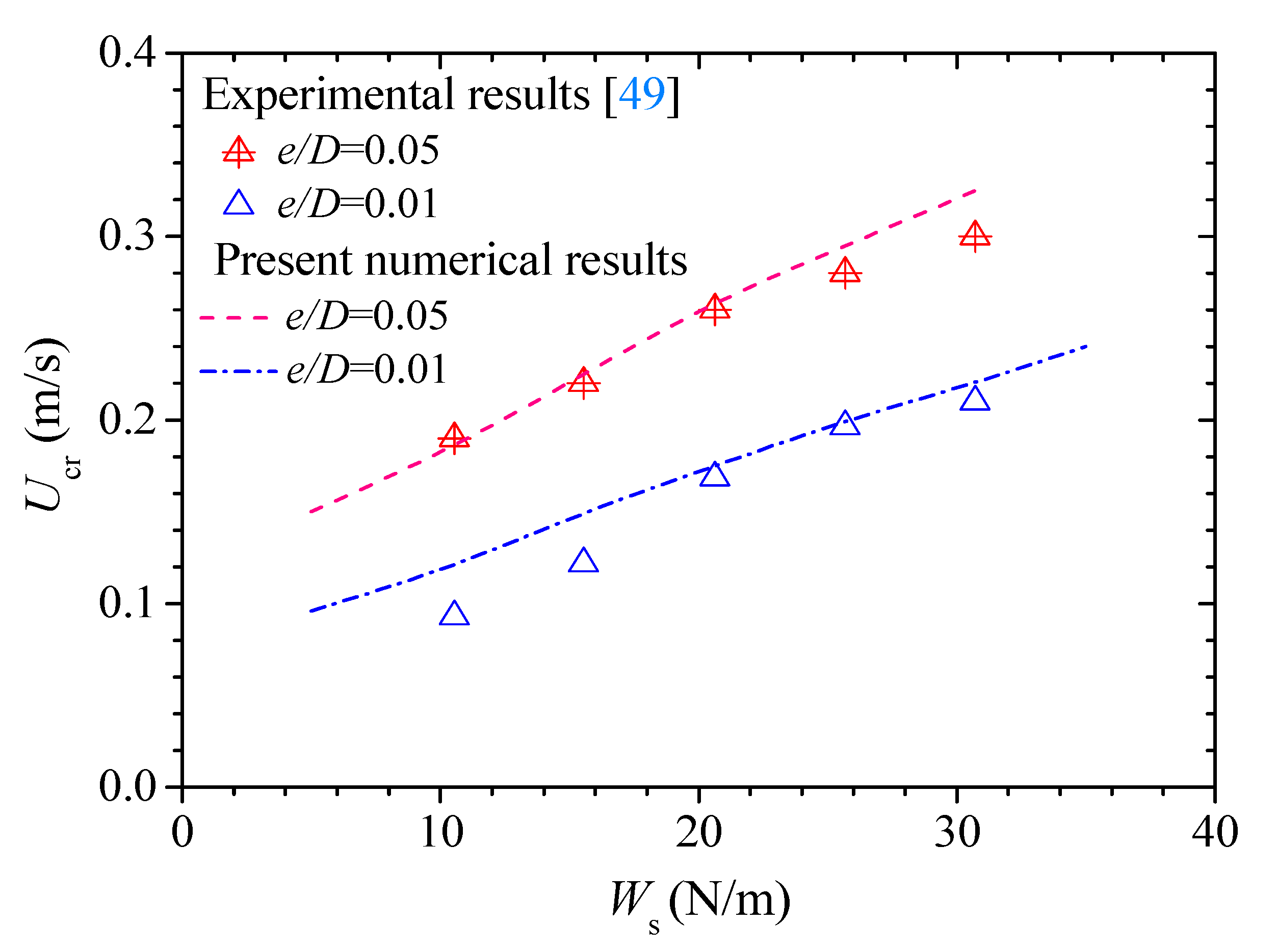
3.2. Critical Velocity for the Lateral Instability of a Pipe
4. Numerical Results and Discussions
4.1. Flow over and Seepage Flow Beneath a Partially Embedded Pipe
4.2. Competition between Tunnel Erosion and Lateral Instability
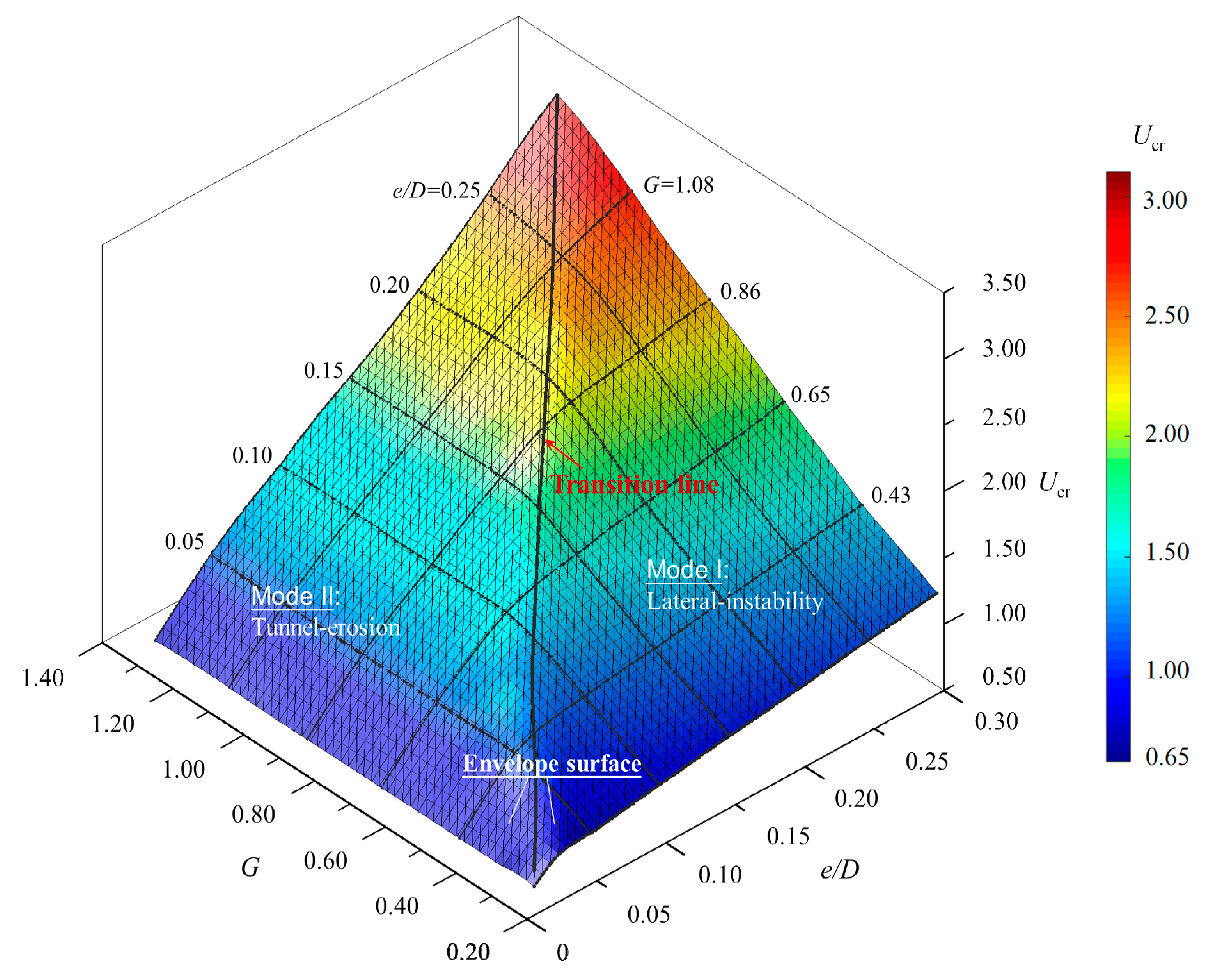
4.3. Instability Envelope: Effects of the Initial Embedment and the Submerged Weight of the Pipe
5. Conclusions
- A coupled flow-seepage-elastoplastic modeling approach was proposed that could realize the synchronous simulation of the pipe hydrodynamics, the seepage flow, and the elastoplastic behavior of the soil beneath the pipe. The proposed model was verified through experimental and numerical results.
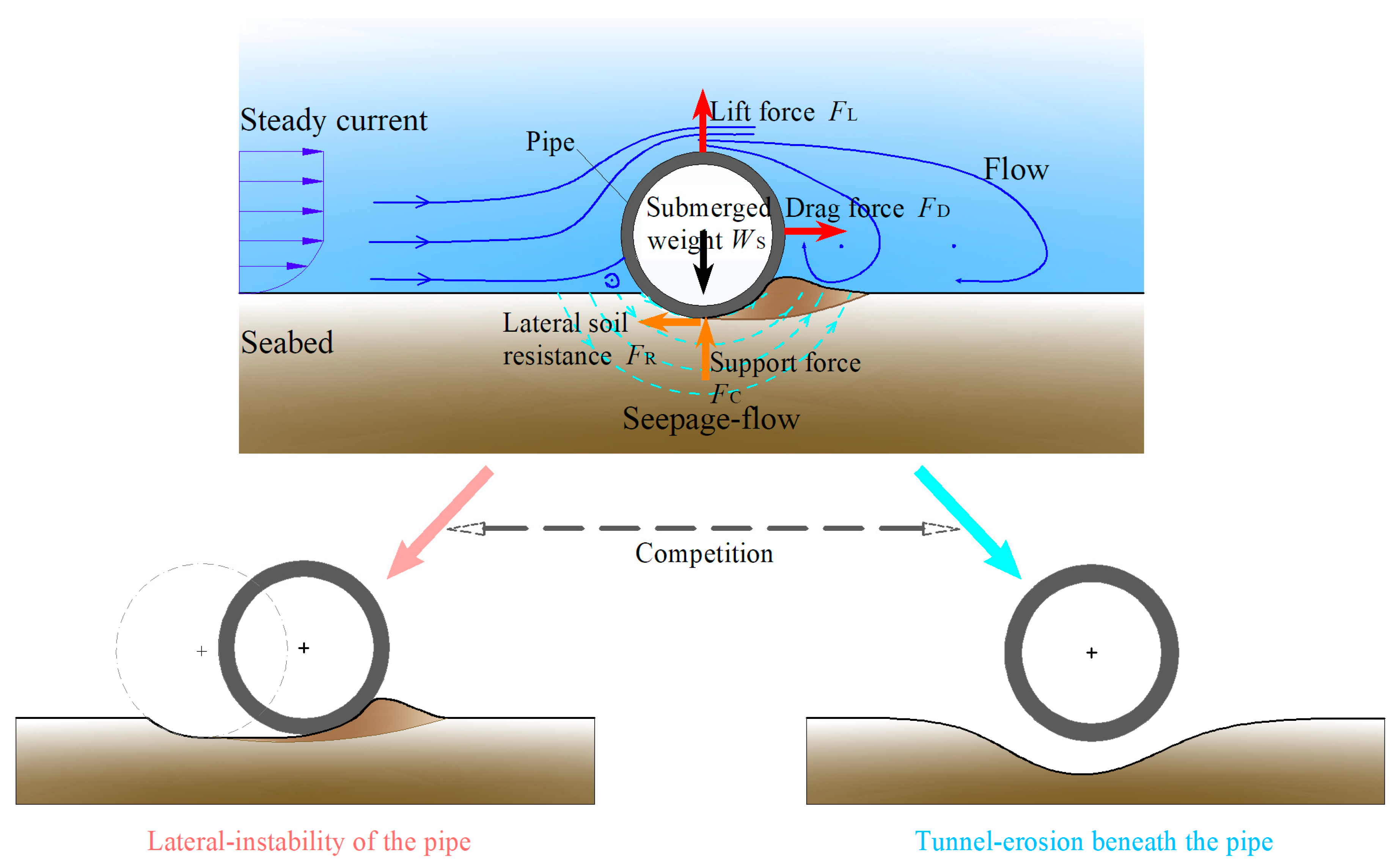
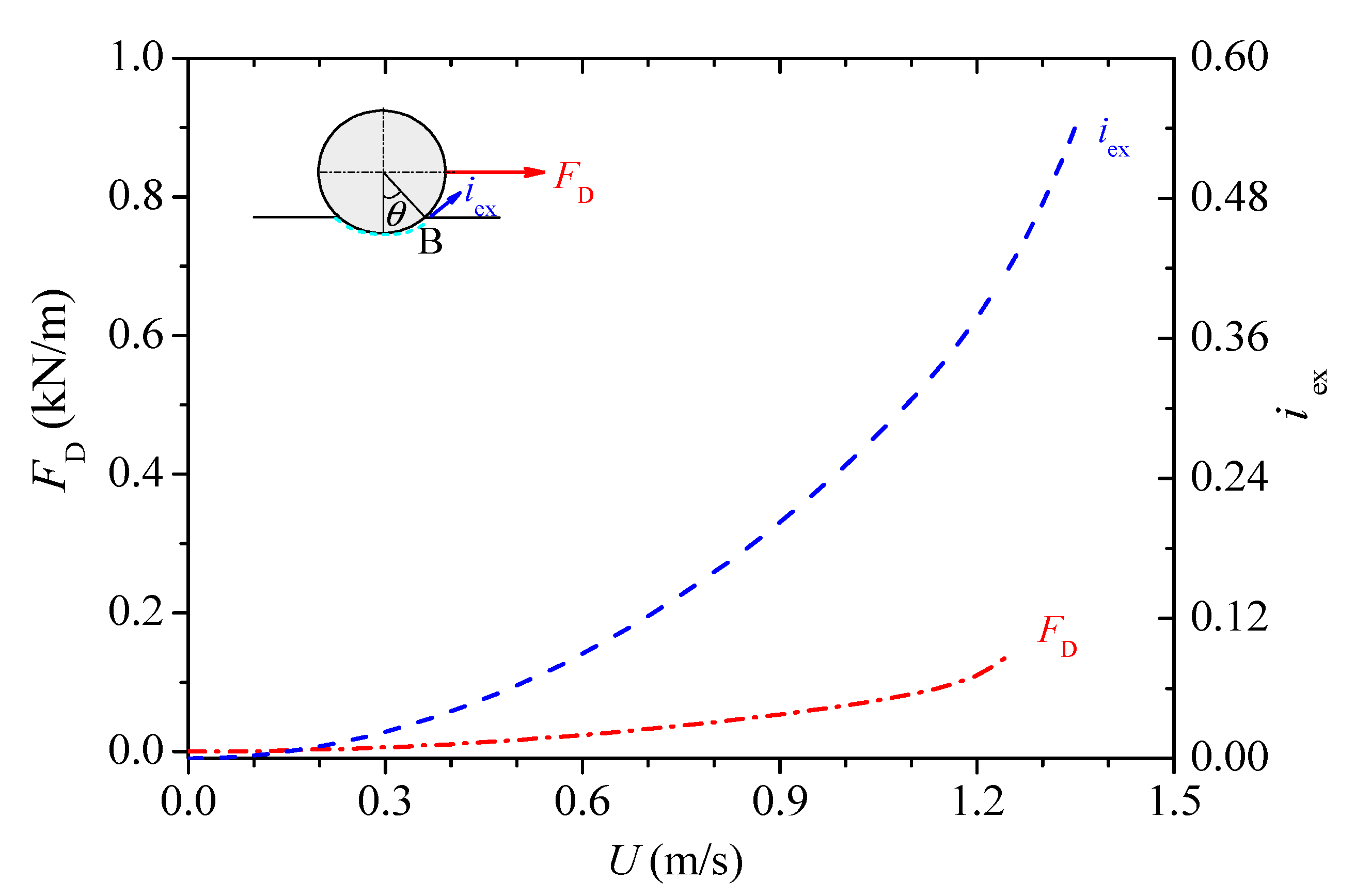
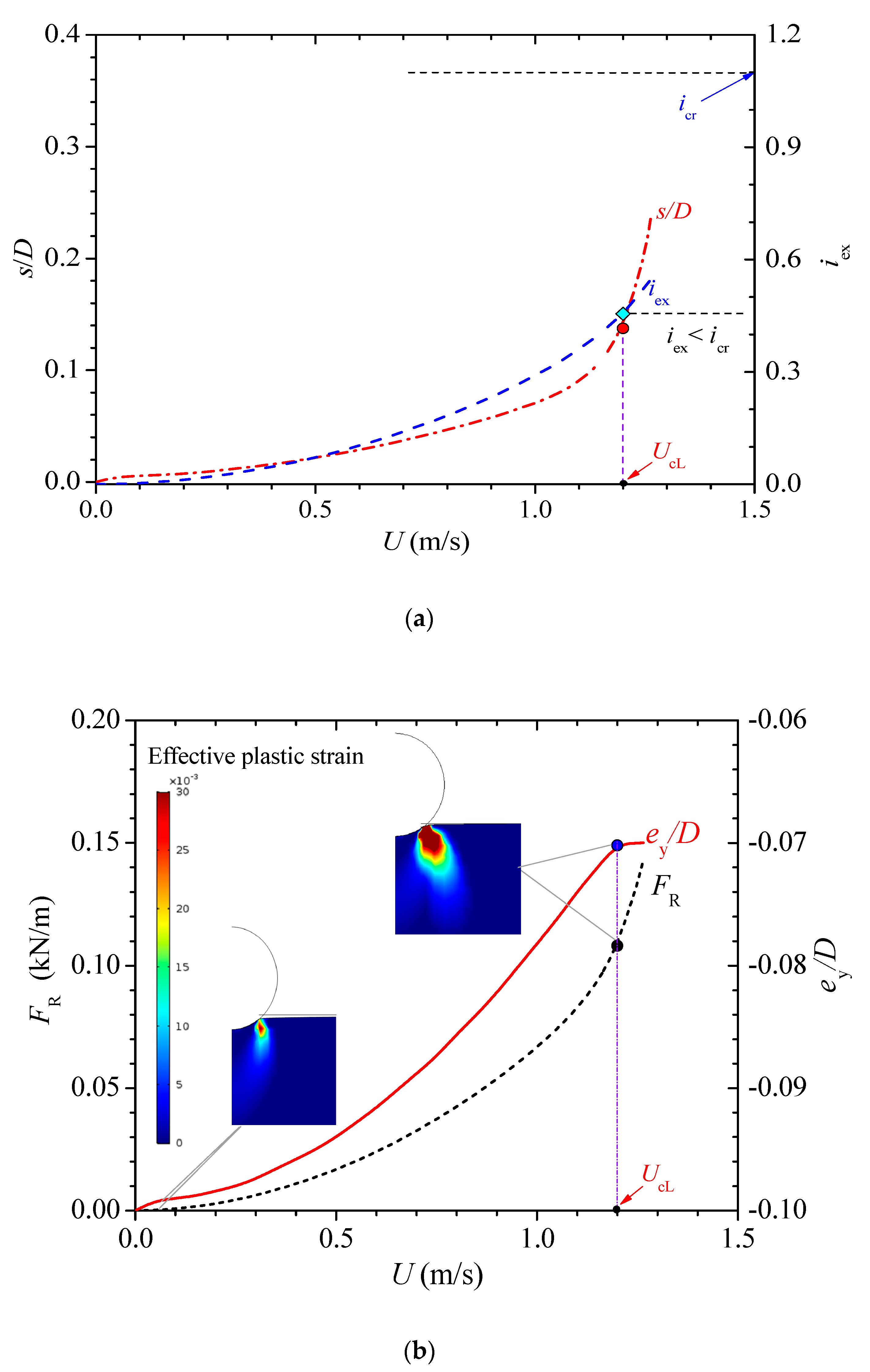
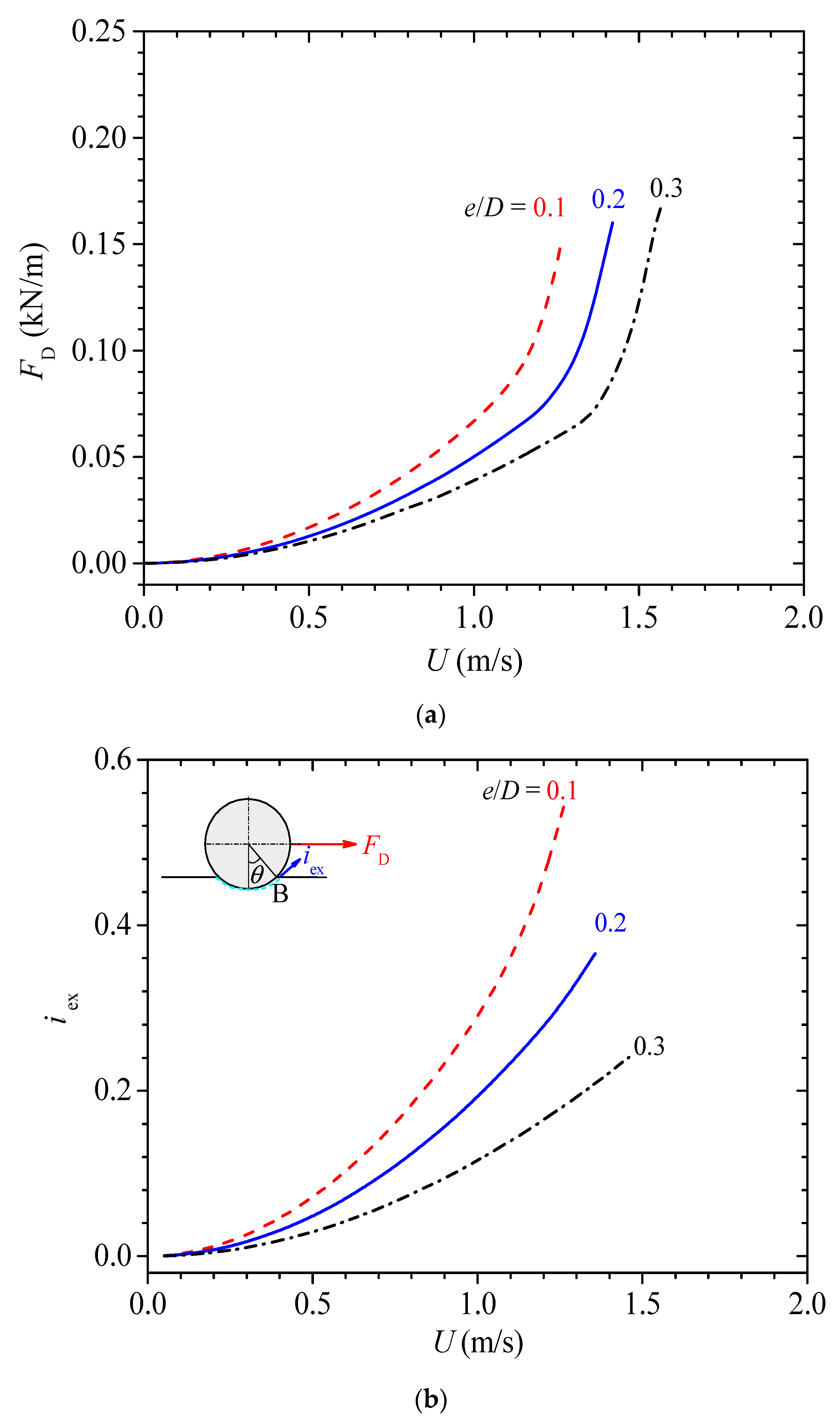
- Both the drag force on the pipe and the hydraulic gradient at the seepage exit beneath the pipe increased concurrently with increasing flow velocity, which could induce either the lateral instability of pipe or the tunnel erosion of soil. The competition between such two instability modes always existed for a partially embedded pipe.
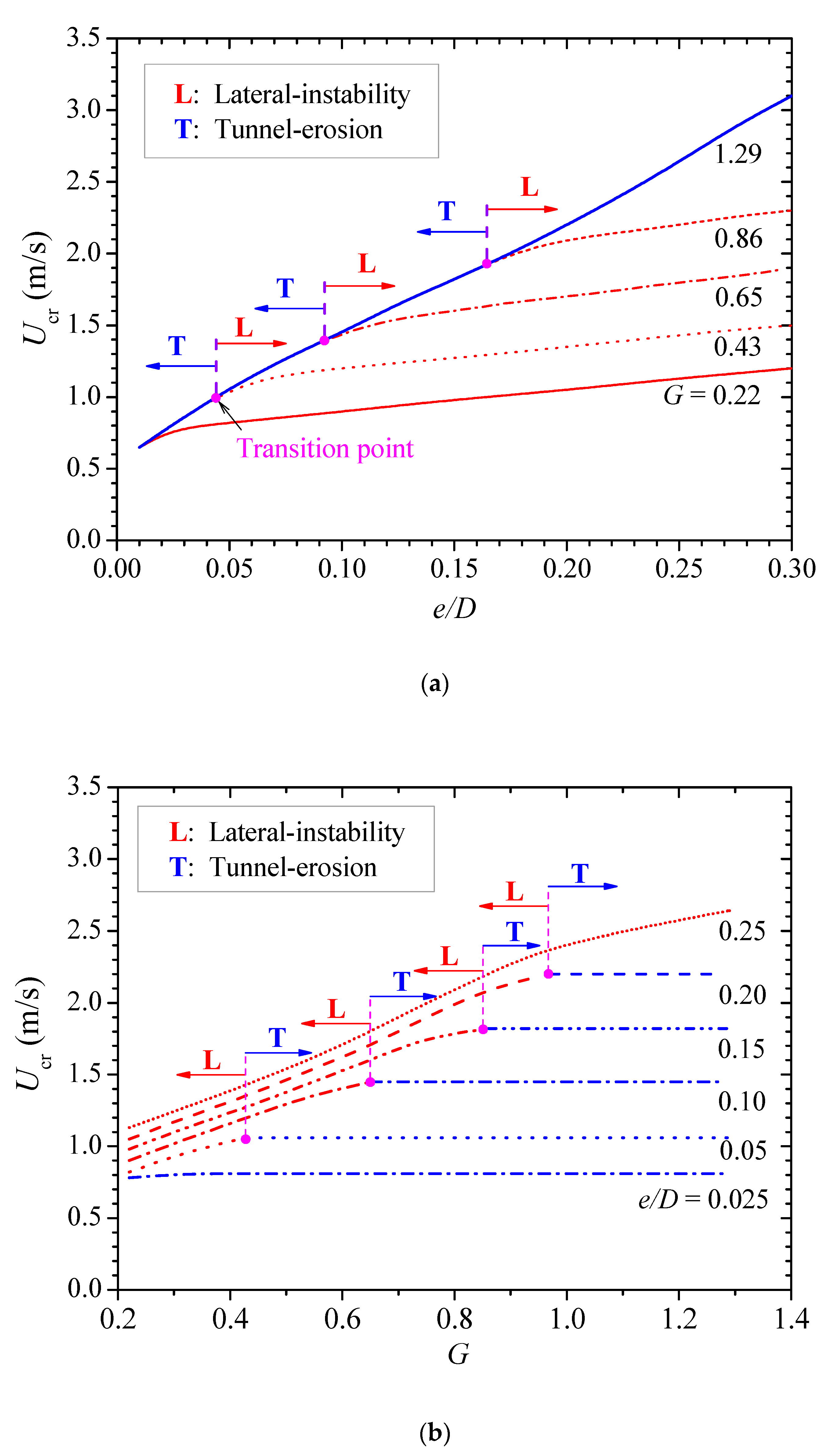
- A parametric study indicated that there generally existed a transition point from tunnel erosion to lateral instability on the critical instability line representing the variation of critical flow velocity (Ucr) with embedment-to-diameter ratio (e/D) for various values of a non-dimensional submerged weight of the pipe (G), or the variation of Ucr with G for various values of e/D. Tunnel erosion was more prone to being triggered than lateral instability for smaller values of the embedment-to-diameter ratio.
- The instability envelope for the flow–pipe–soil interaction system was eventually established, and could be described by three parameters; i.e., Ucr, e/D, and G. It was implied that, for a lighter (smaller G) and more deeply embedded (larger e/D) pipe, lateral instability would be more prone to occur; otherwise, tunnel erosion would be more prone to take place.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Notations
| Body acceleration per unit mass | |
| Cohesion of soil | |
| Constant in Equation (5) | |
| Constant in Equation (5) | |
| Constant in Equations (4) and (5) | |
| Cp | Pressure coefficient at the mudline in the proximity of the pipe |
| d50 | Mean size of soil grains |
| Plastic multiplier in Equations (13) and (14) | |
| D | Outer diameter of pipe |
| Elastic constitutive matrix | |
| Elastoplastic constitutive matrix | |
| e | Initial embedment of pipe |
| ey | Embedment of pipe during lateral instability |
| Ep | Young’s modulus of pipe |
| Elastic modulus of seabed | |
| FD | Drag force on the pipe |
| FL | Lift force on the pipe |
| FC | Vertical support force of soil |
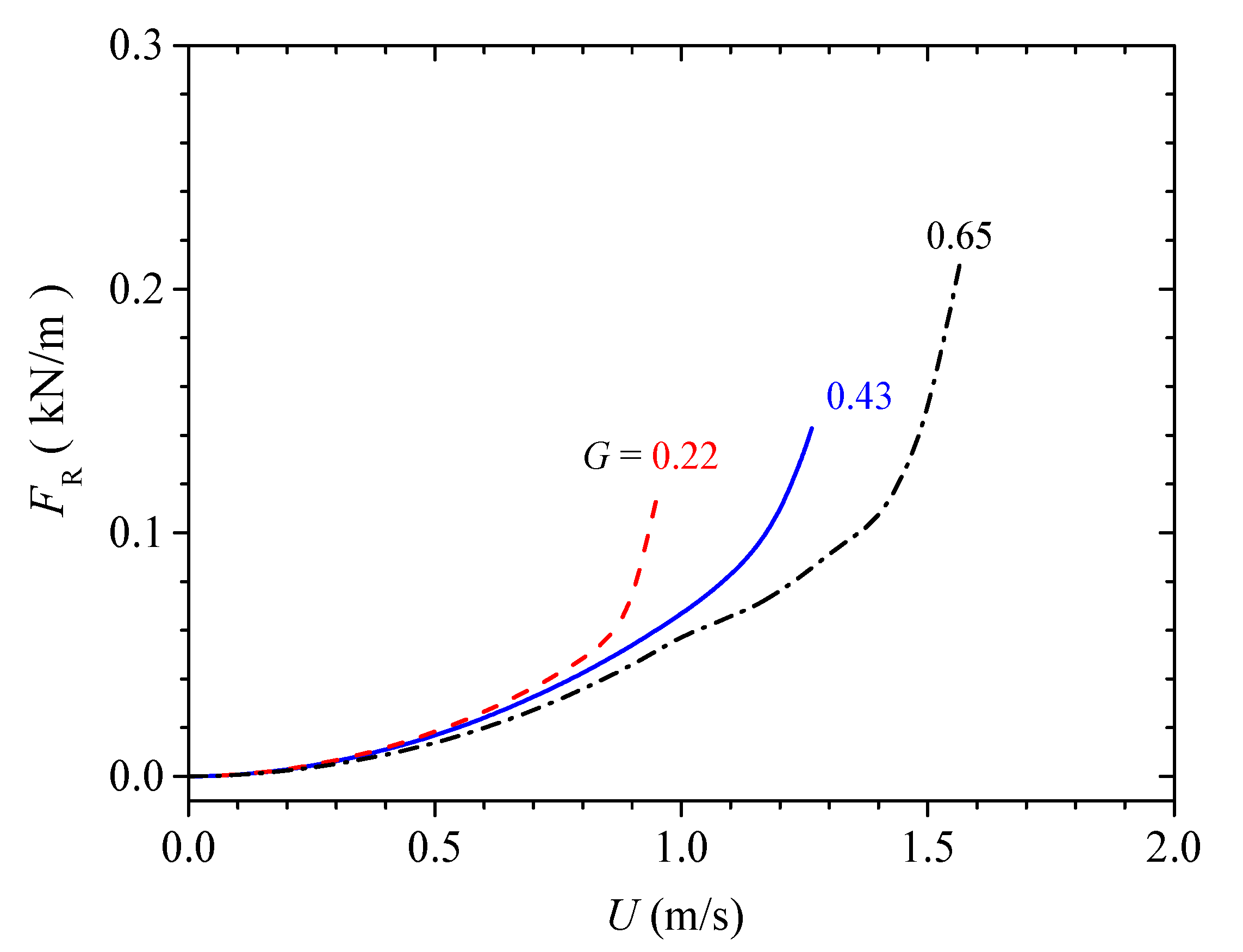
| FR | Lateral soil resistance |
| Fy | Yield function |
| g | Gravitational acceleration |
| G | Non-dimensional submerged weight of pipe |
| Gs | Specific gravity of soil grains |
| Critical hydraulic gradient for the oblique seepage failure | |
| Critical hydraulic gradient for the vertical seepage failure | |
| Hydraulic gradient at the seepage exit | |
| I1 | First stress invariant of Cauchy’s stress tensor |
| It | Turbulent intensity |
| J2 | Second equivalent deviatoric stress |
| Turbulent kinetic energy | |
| Permeability coefficient of soil | |
| Material parameter in the Drucker–Prager criterion | |
| K′ | Apparent bulk modulus of pore water |
| Lt | Turbulence length scale |
| n | Porosity of soil |
| Flow pressure | |
| Pr | Reference pressure in Equation (19) |
| Pp | Flow-induced pressure along the pipe surface |
| Ps | Flow-induced pressure at the mudline around the pipe |
| Plastic potential | |
| Re | Reynolds number |
| s | Lateral displacement of pipe |
| Time | |
| (or ) | Averaged velocity of fluid |
| (or ) | Fluctuating velocity of fluid |
| (or ) | Soil displacement |
| Flow-induced pore water pressure in the soil | |
| U | Flow velocity of steady current |
| UcL | Critical flow velocity for the lateral instability of pipe |
| Ucr | Critical flow velocity for the pipeline instability |
| WS | Submerged weight of pipe |
| (or ) | Coordinate in the horizontal or vertical direction |
| Material parameter in the Drucker–Prager criterion | |
| Effective unit weight of soil | |
| Unit weight of water or pore water | |
| Judging constant in Equation (21) | |
| Kronecker delta in Equations (3), (8) and (12) | |
| Flow velocity increment | |
| Turbulent energy dissipation rate | |
| Strain tensor | |
| Volumetric strain of soil | |
| Elastic strain tensor | |
| Plastic strain tensor | |
| Embedment angle of pipe | |
| Lame parameter in Equation (12) | |
| Lame parameter in Equation (12) | |
| Frictional coefficient at the pipe–soil interface | |
| Poisson ratio of pipe | |
| Kinematic viscosity of fluid | |
| Turbulent viscosity | |
| Poisson ratio of soil | |
| Mass density of soil | |
| Mass density of fluid | |
| Mass density of soil grains | |
| Total stress tensor | |
| Effective stress tensor | |
| Constant in Equation (4) | |
| Constant in Equation (5) | |
| Internal friction angle of soil | |
| Friction angle of pipe–soil interface |
References
- Zhang, G.C.; Qu, H.; Chen, G.J.; Zhao, C.; Zhang, F.L.; Yang, H.Z.; Zhao, Z.; Ma, M. Giant discoveries of oil and gas fields in global deepwaters in the past 40 years and the prospect of exploration. J. Nat. Gas Sci. 2019, 4, 1–28. [Google Scholar] [CrossRef]
- Wang, H.H.; Liu, G.H. Statistics and analysis of subsea pipeline accidents of CNOOC. China Offshore Oil Gas 2017, 29, 157–160. [Google Scholar]
- Fredsøe, J. Pipeline–seabed interaction. J. Water. Port Coast. 2016, 142, 1–20. [Google Scholar] [CrossRef] [Green Version]
- Gao, F.P. Flow-pipe-soil coupling mechanisms and predictions for submarine pipeline instability. J. Hydrodyn. 2017, 29, 763–773. [Google Scholar] [CrossRef]
- Drumond, G.P.; Pasqualino, I.P.; Pinheiro, B.C.; Estefen, S.F. Pipelines, risers and umbilicals failures: A literature review. Ocean Eng. 2018, 148, 412–425. [Google Scholar] [CrossRef]
- Shanmugam, G. Contourites: Physical oceanography, process sedimentology, and petroleum geology. Petrol. Explor. Dev. 2017, 44, 183–216. [Google Scholar] [CrossRef]
- Gao, F.P.; Gu, X.Y.; Jeng, D.S.; Teo, H.T. An experimental study for wave-induced instability of pipelines: The breakout of pipelines. Appl. Ocean Res. 2002, 24, 83–90. [Google Scholar] [CrossRef]
- Gao, F.P.; Gu, X.Y.; Jeng, D.S. Physical modeling of untrenched submarine pipeline instability. Ocean Eng. 2003, 30, 1283–1304. [Google Scholar] [CrossRef]
- Wagner, D.A.; Murff, J.D.; Brennodden, H.; Sveggen, O. Pipe-soil interaction model. J. Water. Port Coast. 1989, 115, 205–220. [Google Scholar] [CrossRef]
- Det Norske Veritas (DNV). On-Bottom Stability Design of Submarine Pipeline; DNV Recommended Practice DNV-RP-F109; Det Norske Veritas: Oslo, Norway, 2010. [Google Scholar]
- Det Norske Veritas and Germanischer Lloyd (DNVGL). Free Spanning Pipelines; DNV Recommended Practice DNV-RP-F105; Det Norske Veritas and Germanischer Lloyd: Oslo, Norway, 2017. [Google Scholar]
- Verley, R.L.P.; Sotberg, T. A soil resistance model for pipeline placed on sandy soils. J. Offshore Mech. Arct. Eng. 1994, 116, 145–153. [Google Scholar] [CrossRef]
- Verley, R.L.P.; Lund, K.M. A soil resistance model for pipelines placed on clay soils. In Proceedings of the 14th International Conference on Offshore, Marine and Arctic Engineering, Copenhagen, Demark, 18–22 June 1995; pp. 225–232. [Google Scholar]
- Gao, F.P.; Yan, S.M.; Yang, B.; Wu, Y.X. Ocean currents-induced pipeline lateral stability on sandy seabed. J. Eng. Mech. 2007, 133, 1086–1092. [Google Scholar] [CrossRef] [Green Version]
- An, H.W.; Luo, C.C.; Cheng, L.; White, D. A new facility for studying ocean-structure-seabed interactions: The O-tube. Coast. Eng. 2013, 82, 88–101. [Google Scholar] [CrossRef]
- Griffiths, T.; Draper, S.; White, D.; Cheng, L.; An, H.W.; Fogliani, A. Improved stability design of subsea pipelines on mobile seabeds: Learnings from the STABLEpipe JIP. In Proceedings of the 37th International Conference on Ocean, Offshore and Arctic Engineering, Madrid, Spain, 17–22 June 2018. [Google Scholar]
- Chiew, Y.M. Mechanics of local around submarine pipeline. J. Hydraul. Eng. 1990, 4, 515–529. [Google Scholar] [CrossRef]
- Sumer, B.M.; Truelsen, C.; Sichmann, T.; Fredsøe, J. Onset of scour below pipelines and self-burial. Coast. Eng. 2001, 42, 313–335. [Google Scholar] [CrossRef]
- Gao, F.P.; Yang, B.; Yan, S.M.; Wu, Y.X. Occurrence of spanning of a submarine pipeline with initial embedment. In Proceedings of the 6th International Offshore and Polar Engineering Conference, Lisbon, Portugal, 1–6 July 2007; pp. 887–891. [Google Scholar]
- Gao, F.P.; Luo, C.C. Flow-pipe-seepage coupling analysis of spanning initiation of a partially-embedded pipeline. J. Hydrodyn. 2010, 22, 478–487. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Q.; Draper, S.; Cheng, L.; An, H.W. Effect of limited sediment supply on sedimentation and the onset of tunnel scour below subsea pipelines. Coast. Eng. 2016, 116, 103–117. [Google Scholar] [CrossRef]
- White, D.J.; Clukey, E.C.; Randolph, M.F.; Boylan, N.P.; Bransby, M.F.; Zakeri, A.; Hill, A.J.; Jaeck, C. The state of knowledge of pipe-soil interaction for on-bottom pipeline design. In Proceedings of the Annual Offshore Pipeline Technology Conference, Houston, TX, USA, 17–22 June 2017. [Google Scholar]
- Shi, Y.M.; Gao, F.P. Lateral instability and tunnel erosion of a submarine pipeline: Competition mechanism. Bull. Eng. Geol. Environ. 2018, 77, 1069–1080. [Google Scholar] [CrossRef] [Green Version]
- Gao, F.P.; Wang, N.; Li, J.H.; Han, X.T. Pipe-soil interaction model for current-induced pipeline instability on a sloping sandy seabed. Can. Geotech. J. 2016, 53, 1822–1830. [Google Scholar] [CrossRef] [Green Version]
- Qi, W.G.; Shi, Y.M.; Gao, F.P. Uplift soil resistance to a shallowly-buried pipeline in the sandy seabed under waves: Poro-elastoplastic modeling. App. Ocean. Res. 2020, 95, 102024. [Google Scholar] [CrossRef]
- Gao, F.P.; Wu, Y.X. Non-linear wave induced transient response of soil around a trenched pipeline. Ocean Eng. 2006, 33, 311–330. [Google Scholar] [CrossRef] [Green Version]
- Shih, T.H. Some developments in computational modeling of turbulent flows. Fluid Dyn. Res. 1997, 20, 67–96. [Google Scholar] [CrossRef]
- Durbin, P.A. Some recent developments in turbulence closure modeling. Annu. Rev. Fluid Mech. 2018, 50, 77–103. [Google Scholar] [CrossRef]
- Liang, D.F.; Cheng, L. Numerical modeling of flow and scour below a pipeline in currents Part I. Flow simulation. Coast. Eng. 2005, 52, 25–42. [Google Scholar] [CrossRef]
- Launder, B.E.; Spalding, D.B. The numerical computation of turbulent flow. Comput. Methods Appl. Mech. Eng. 1974, 3, 269–289. [Google Scholar] [CrossRef]
- Rodi, W. Turbulence Models and Their Application in Hydraulics: A State of the Art Review, 3rd ed.; Balkema: Rotterdam, The Netherlands, 1993. [Google Scholar]
- Biot, M.A. General theory of three-dimensional consolidation. J. Appl. Phys. 1941, 12, 155–164. [Google Scholar] [CrossRef]
- Potts, D.M.; Zdravkovic, L. Finite Element Analysis in Geotechnical Engineering: Theory; Thomas Telford: London, UK, 2001. [Google Scholar]
- Chang, C.S.; Yin, Z.Y. Micromechanical modeling for behavior of silty sand with influence of fine content. Int. J. Solids Struct. 2011, 48, 2655–2667. [Google Scholar] [CrossRef] [Green Version]
- Jin, Y.F.; Yin, Z.Y.; Shen, S.L.; Zhang, D.M. A new hybrid real-coded genetic algorithm and its application to parameters identification of soils. Inverse Probl. Sci. Eng. 2017, 25, 1343–1366. [Google Scholar] [CrossRef]
- Yin, Z.Y.; Wu, Z.Y.; Hicher, P.Y. Modeling the monotonic and cyclic behavior of granular materials by an exponential constitutive function. J. Eng. Mech. 2018, 144, 04018014. [Google Scholar] [CrossRef]
- Jin, Y.F.; Yin, Z.Y.; Wu, Z.X.; Daouadji, A. Numerical modeling of pile penetration in silica sands considering the effect of grain breakage. Finite Elem. Anal. Des. 2018, 144, 15–29. [Google Scholar] [CrossRef] [Green Version]
- Drucker, D.C.; Prager, W. Soil mechanics and plastic analysis on limit design. J. Appl. Math. 1952, 10, 157–165. [Google Scholar] [CrossRef] [Green Version]
- Jin, Z.; Yin, Z.Y.; Kotronis, P.; Li, Z. Advanced numerical modelling of caisson foundations in sand to investigate the failure envelope in the H-M-V space. Ocean Eng. 2019, 190, 106394. [Google Scholar] [CrossRef] [Green Version]
- COMSOL Multiphysics. COMSOL Multiphysics® Reference Guide Version 5.3a; COMSOL AB: Stockholm, Sweden, 2017. [Google Scholar]
- Versteeg, H.K.; Malalasekera, W. An Introduction to Computational Fluid Dynamics-The Finite Volume Method; Pearson Prentice Hall: London, UK, 1995. [Google Scholar]
- Launder, B.E. Numerical computation of convective heat transfer in complex turbulent flows: Time to abandon wall functions. Int. J. Heat Mass Transfer. 1984, 27, 1482–1491. [Google Scholar] [CrossRef]
- Yimsiri, S.; Soga, K.; Yoshizaki, K.; Dasari, G.R.; O’Rourke, T.D. Lateral and upward soil-pipeline interactions in sand for deep burial-depth conditions. J. Geotech. Geoenviron. Eng. 2004, 130, 830–842. [Google Scholar] [CrossRef]
- Bearman, P.W.; Zdravkovich, M.M. Flow around a circular cylinder near a plane boundary. J. Fluid Mech. 1978, 89, 33–47. [Google Scholar] [CrossRef]
- Tsiolakis, E.P. Reynoldische Spannungen in Einer Mit Einem Kreiszylinder Gestörten Turbulenten Plattengrenzschicht. Ph.D. Thesis, Dortmund University, Dortmund, Germany, 1982. (In German). [Google Scholar]
- Liang, D.F.; Cheng, L. A numerical model of onset of scour below offshore pipelines subject to steady currents. In Proceedings of the 1st International Symposium on Frontiers in Offshore Geotechnics, Perth, Australia, 19–21 September 2005; pp. 637–644. [Google Scholar]
- Zang, Z.P.; Cheng, L.; Zhao, M.; Liang, D.F.; Teng, B. A numerical model for onset of scour below offshore pipelines. Coast. Eng. 2009, 56, 458–466. [Google Scholar] [CrossRef]
- Lin, Z.B.; Guo, Y.K.; Jeng, D.S.; Liao, C.C.; Rey, N. An integrated numerical model for wave–soil–pipeline interactions. Coast. Eng. 2016, 108, 25–35. [Google Scholar] [CrossRef] [Green Version]
- Xu, K.; Gao, F.P.; Qi, W.G. Sliding-rolling mechanism for lateral stability of the pipeline on a silty seabed. In Proceedings of the 13th Pacific-Asia Offshore Mechanics Symposium, Jeju, Korea, 14–17 October 2018; pp. 560–567. [Google Scholar]
- Mao, Y. Seabed scour under pipelines. In Proceedings of the 7th International Symposium on Offshore Mechanics and Arctic Engineering, Houston, TX, USA, 7–12 February 1988; pp. 33–38. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | Units | Notes | |
|---|---|---|---|---|
| Seabed (sand) | Buoyant unit weight of soil () | 9.3 | kN/m3 | |
| Elastic modulus (Es) | 30 | MPa | ||
| Poisson’s ratio () | 0.3 | |||
| Angle of internal friction (φ) | 35 | degree | ||
| Cohesion (c) | 0 | kPa | ||
| Porosity of soil (n) | 0.43 | |||
| Current (steady flow) | Inflow velocity (U) | 0.05~1.50 | m/s | |
| Mass density () | 1.0 × 103 | kg/m3 | ||
| Kinematic viscosity () | 1.0 × 10−6 | m2/s | ||
| Pipe (steel) | Diameter (D) | 0.5 | m | |
| Submerged weight per meter (Ws) | 1.0 | kN/m | Varied in Section 4.3 | |
| Young’s modulus (Ep) | 2.1 × 105 | MPa | ||
| Poisson’s ratio () | 0.2 | |||
| Frictional coefficient at the pipe–soil interface () | 0.37 | |||
| Initial embedment-to-diameter ratio (e/D) | 0.10 | Varied in Section 4.3 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, Y.; Gao, F.; Wang, N.; Yin, Z. Coupled Flow-Seepage-Elastoplastic Modeling for Competition Mechanism between Lateral Instability and Tunnel Erosion of a Submarine Pipeline. J. Mar. Sci. Eng. 2021, 9, 889. https://doi.org/10.3390/jmse9080889
Shi Y, Gao F, Wang N, Yin Z. Coupled Flow-Seepage-Elastoplastic Modeling for Competition Mechanism between Lateral Instability and Tunnel Erosion of a Submarine Pipeline. Journal of Marine Science and Engineering. 2021; 9(8):889. https://doi.org/10.3390/jmse9080889
Chicago/Turabian StyleShi, Yumin, Fuping Gao, Ning Wang, and Zhenyu Yin. 2021. "Coupled Flow-Seepage-Elastoplastic Modeling for Competition Mechanism between Lateral Instability and Tunnel Erosion of a Submarine Pipeline" Journal of Marine Science and Engineering 9, no. 8: 889. https://doi.org/10.3390/jmse9080889