
A Eulerian–Lagrangian Coupled Method for the Simulation of Submerged Granular Column Collapse


Abstract
:1. Introduction
2. Mathematical Formulation
2.1. Water-Soil Mixture Model
2.2. Constitutive Laws for the Solid Phase
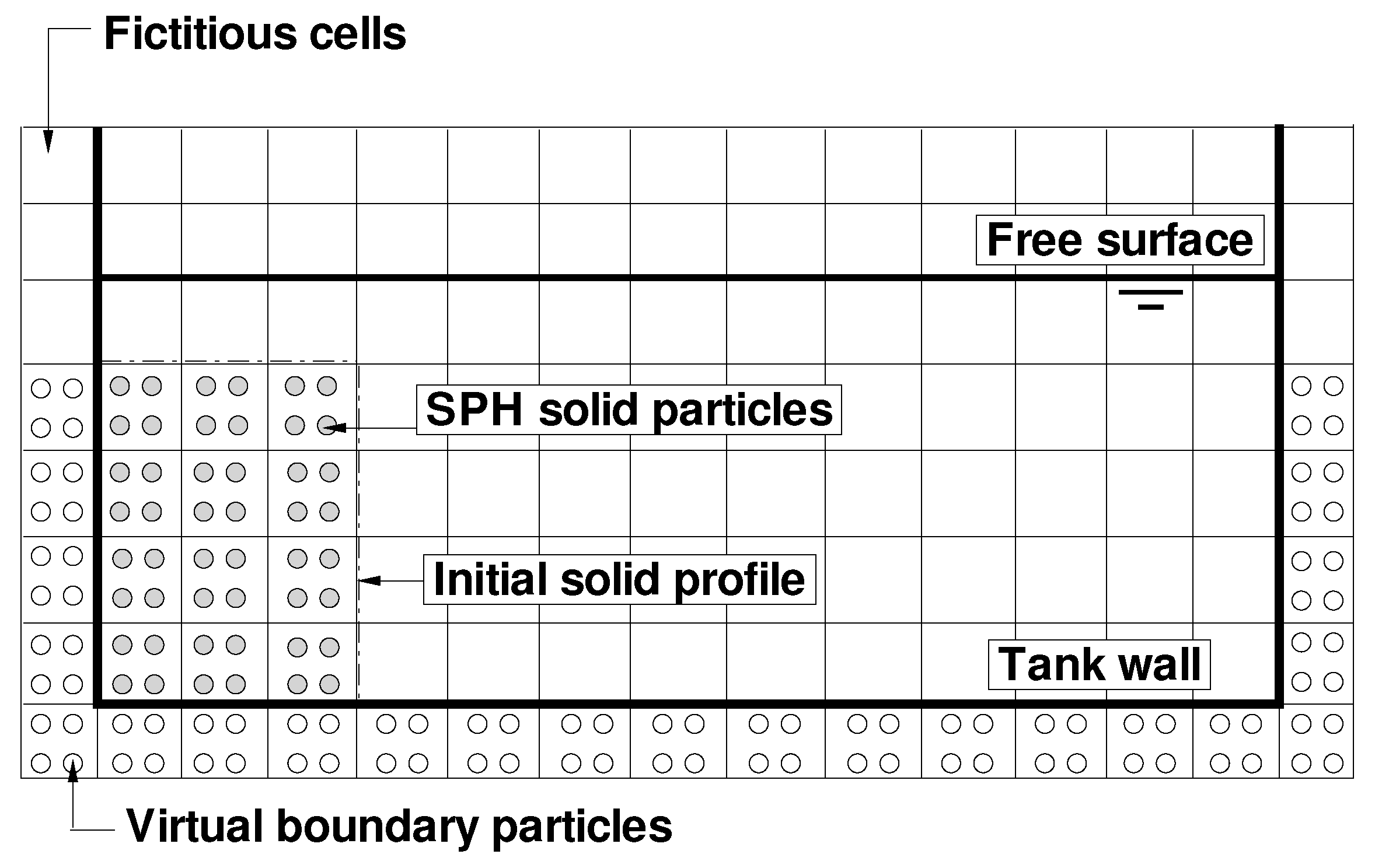
3. Eulerian–Lagrangian Coupled Method
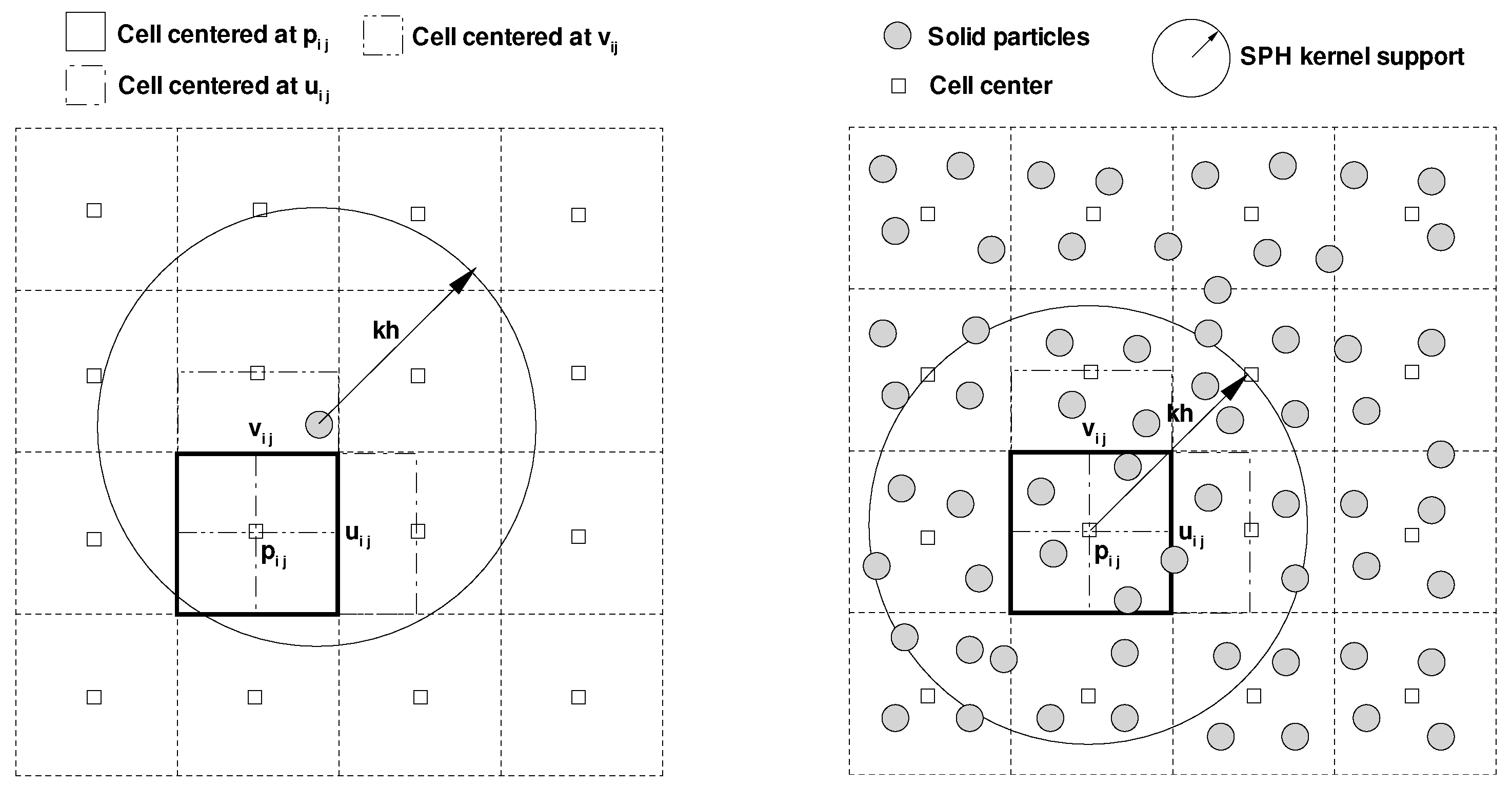
3.1. FVM and SPH Coupling
3.2. Special Treatment of the Pore Pressure
3.3. Time Integration and Boundary Conditions
4. Simulations and Results Analysis
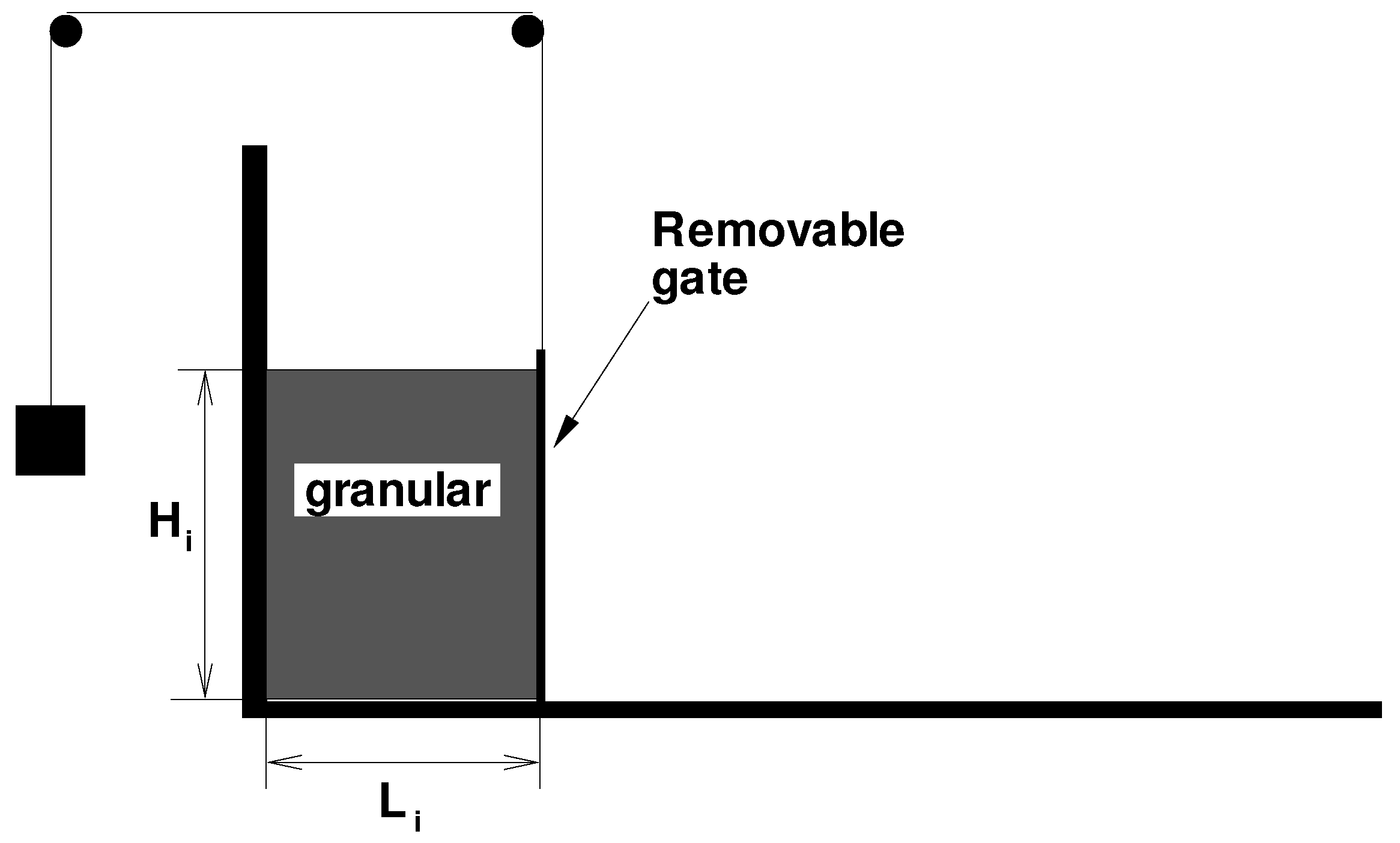
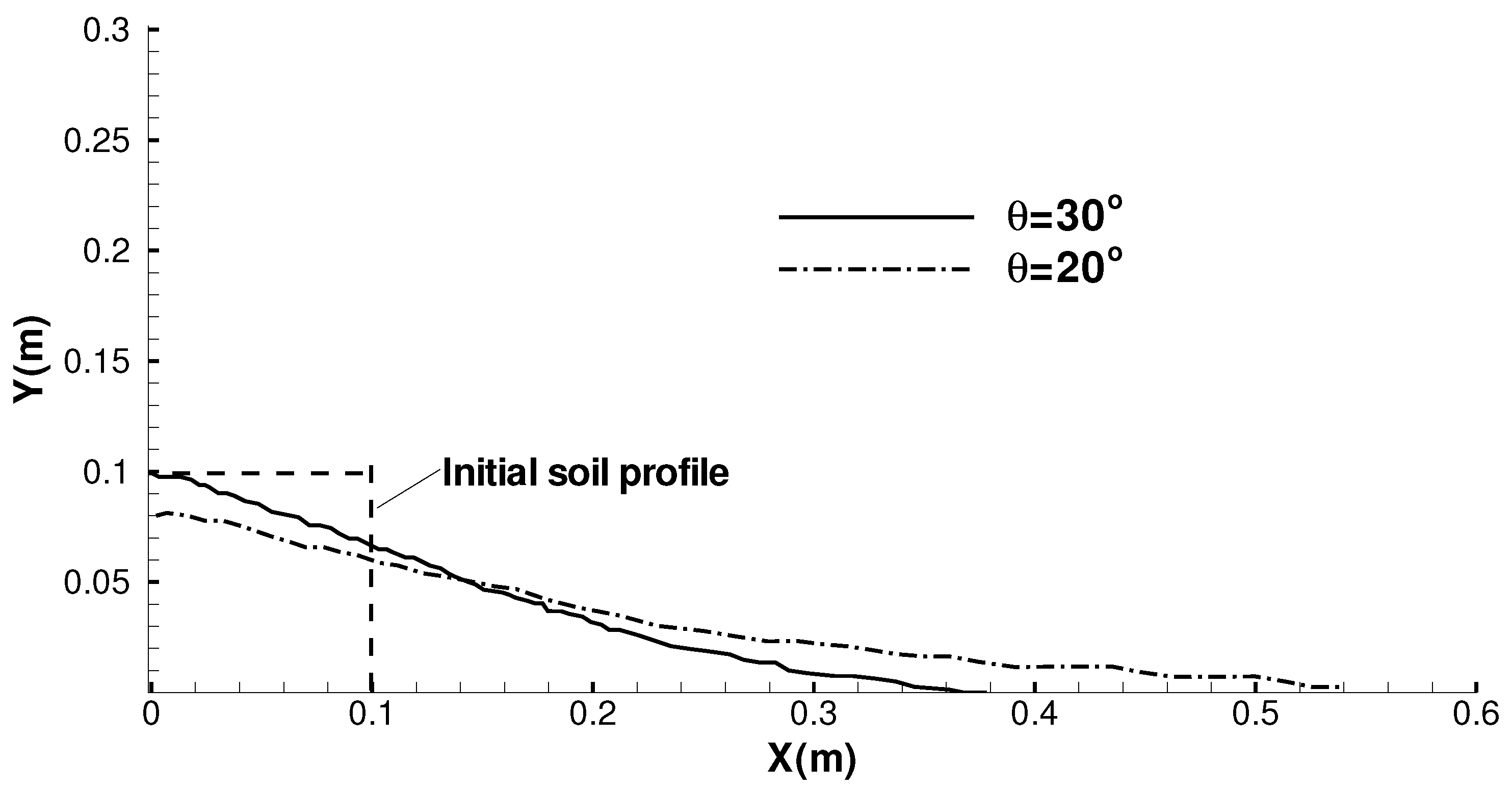
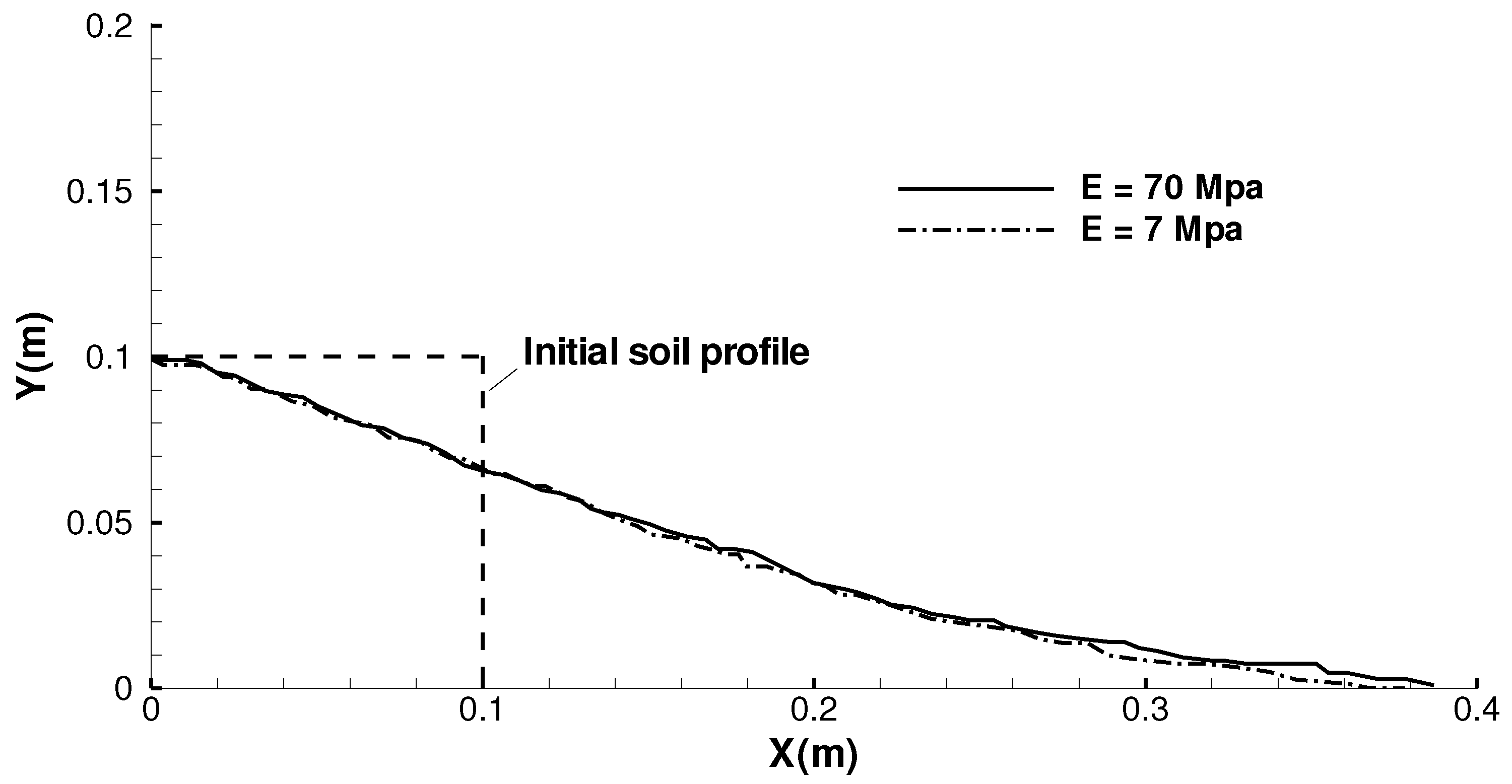
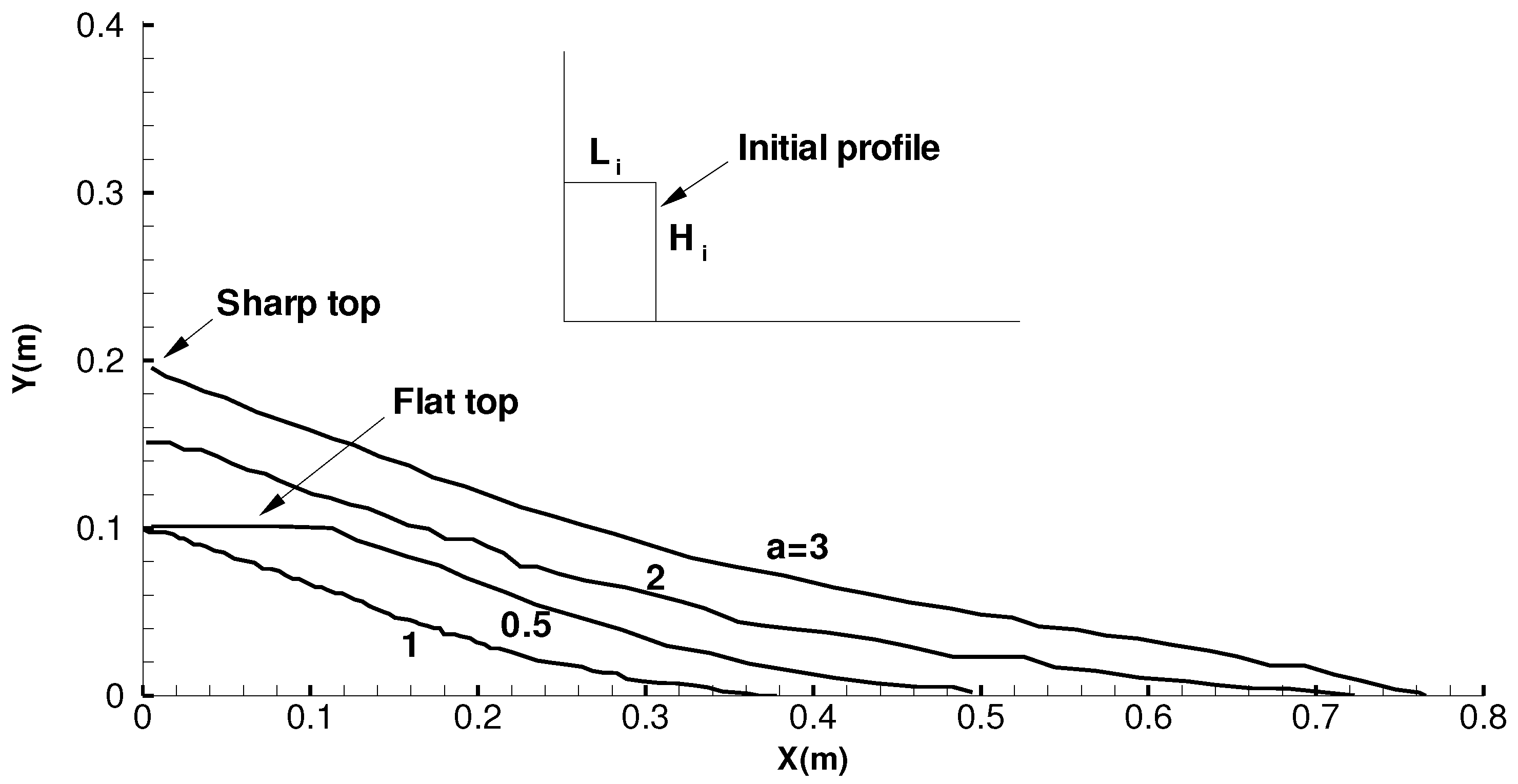
4.1. Dry Granular Column Collapse
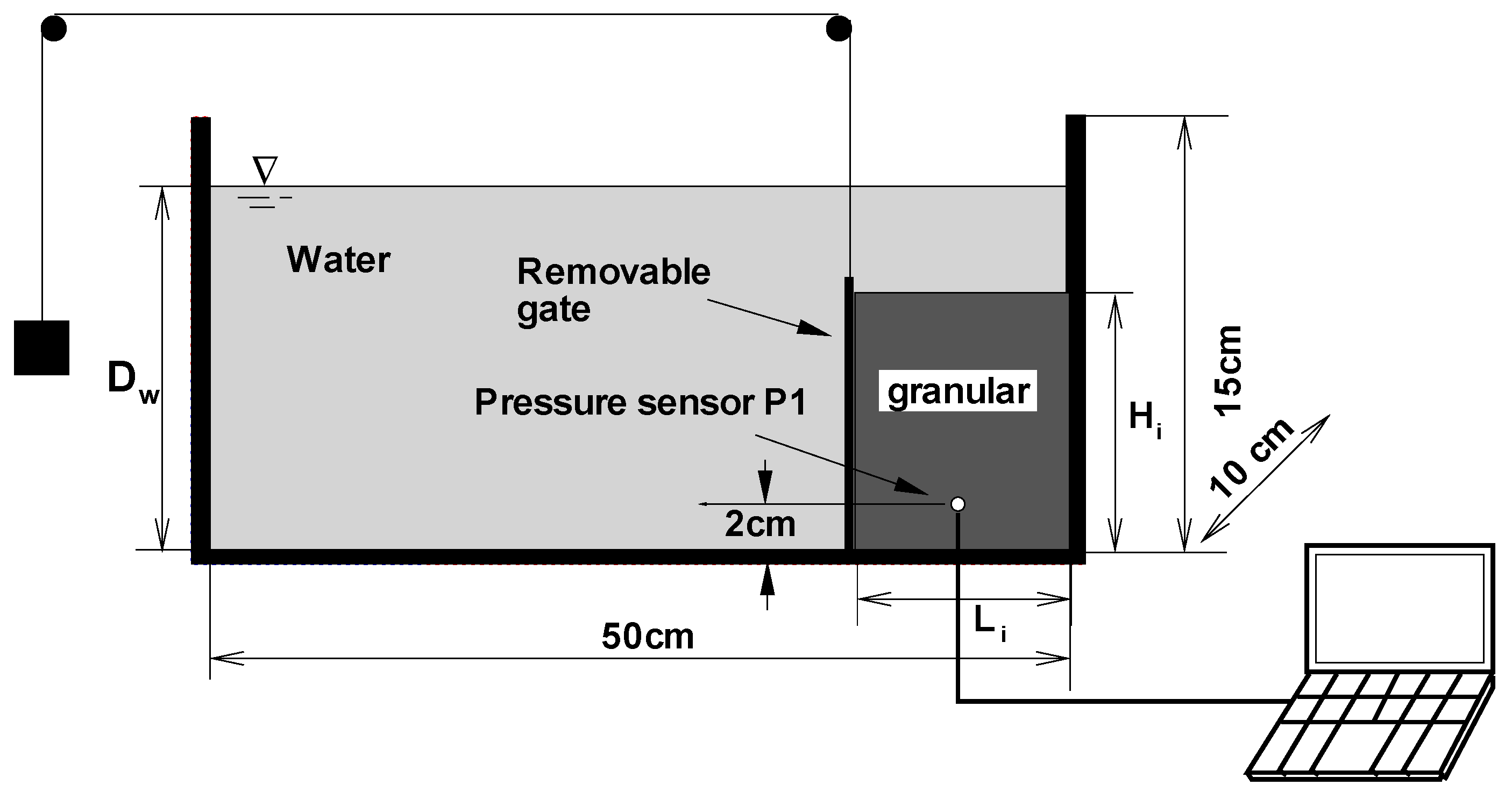
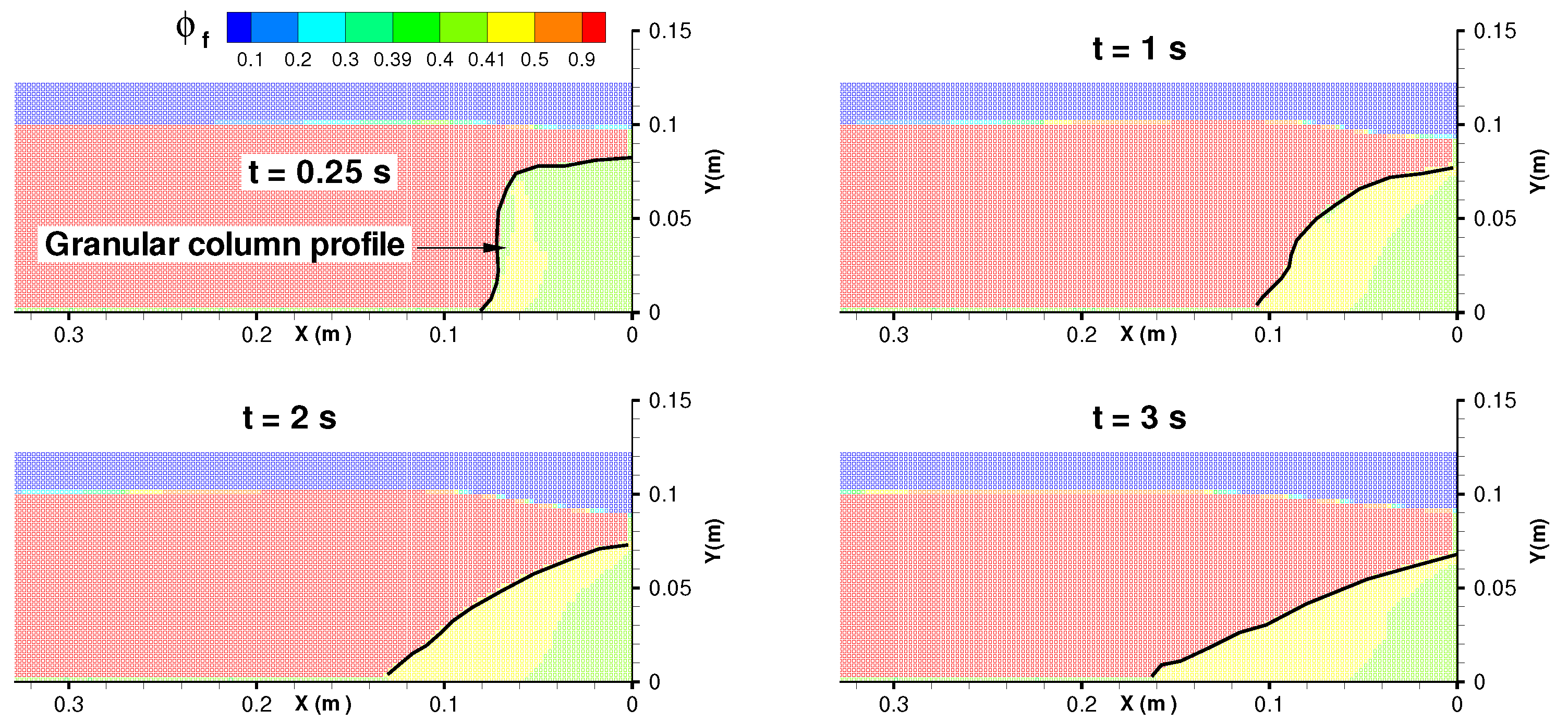
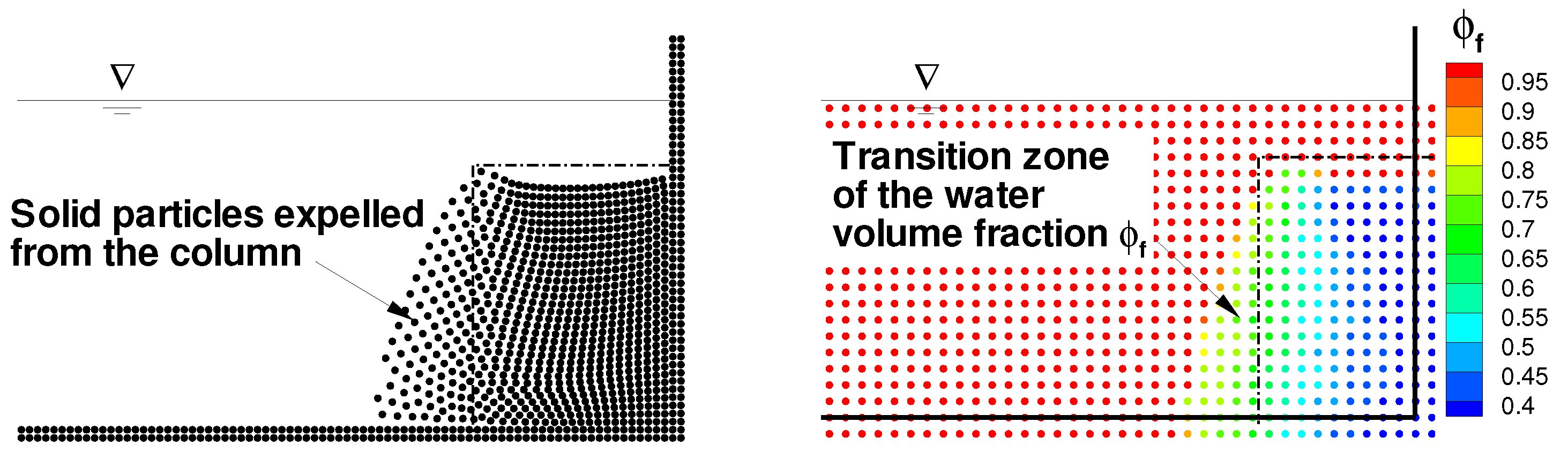
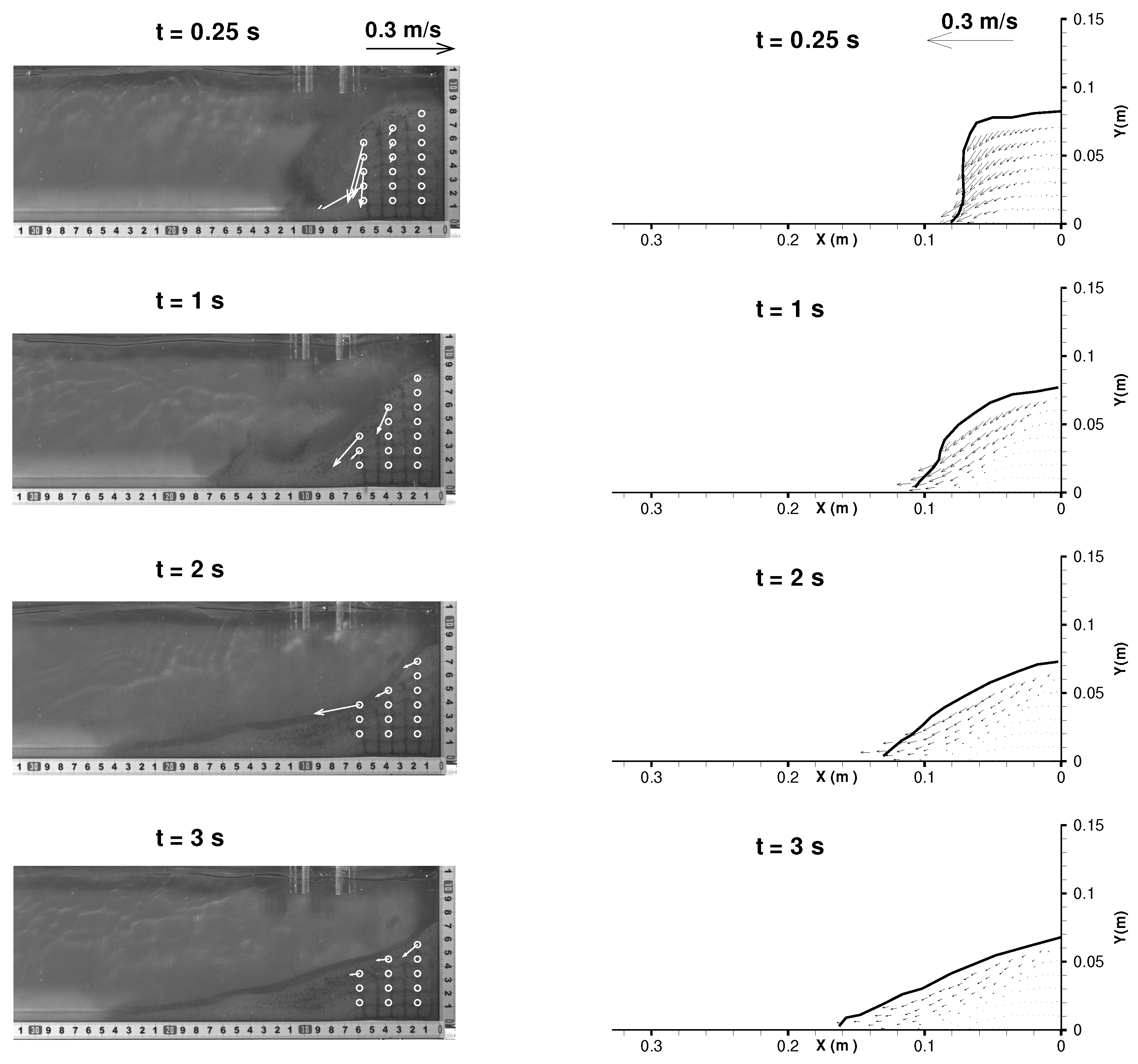
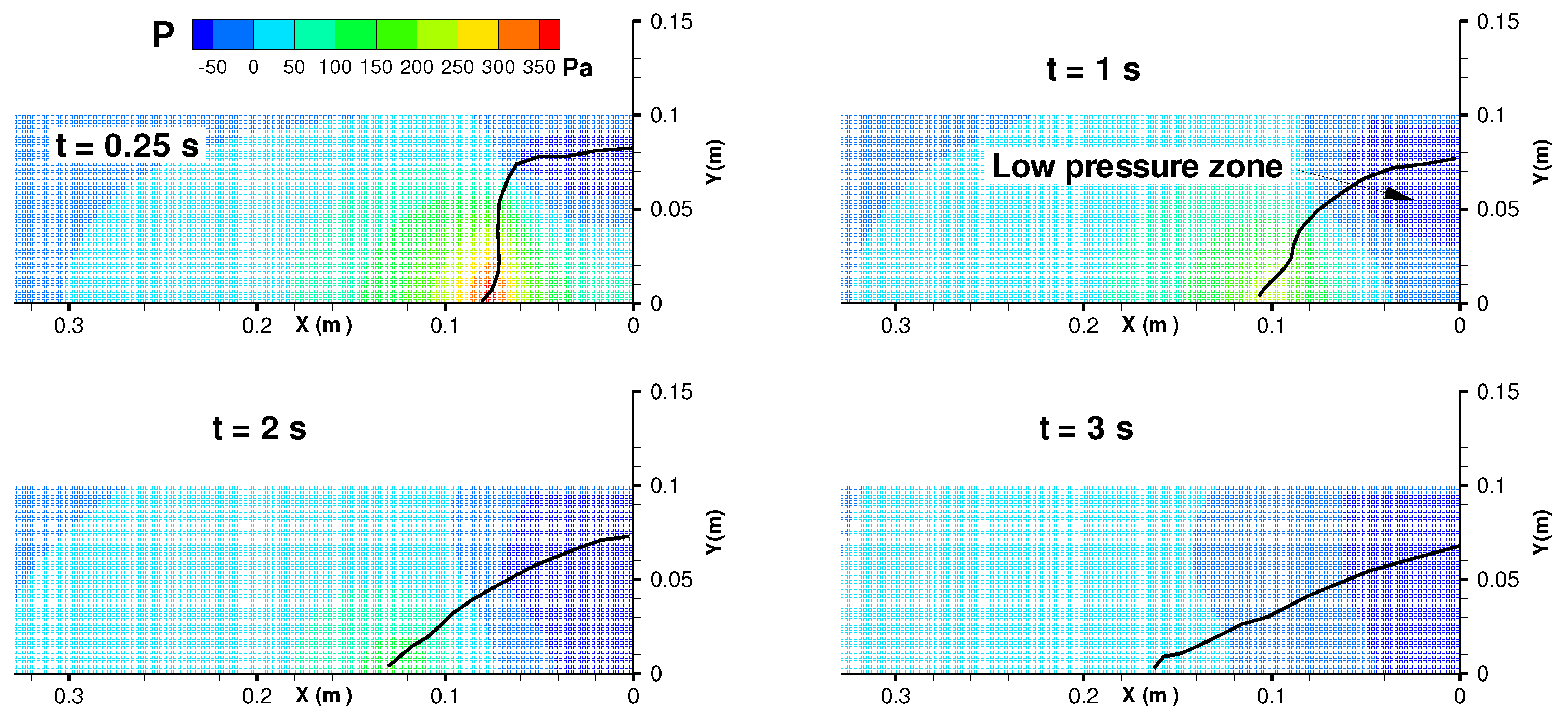
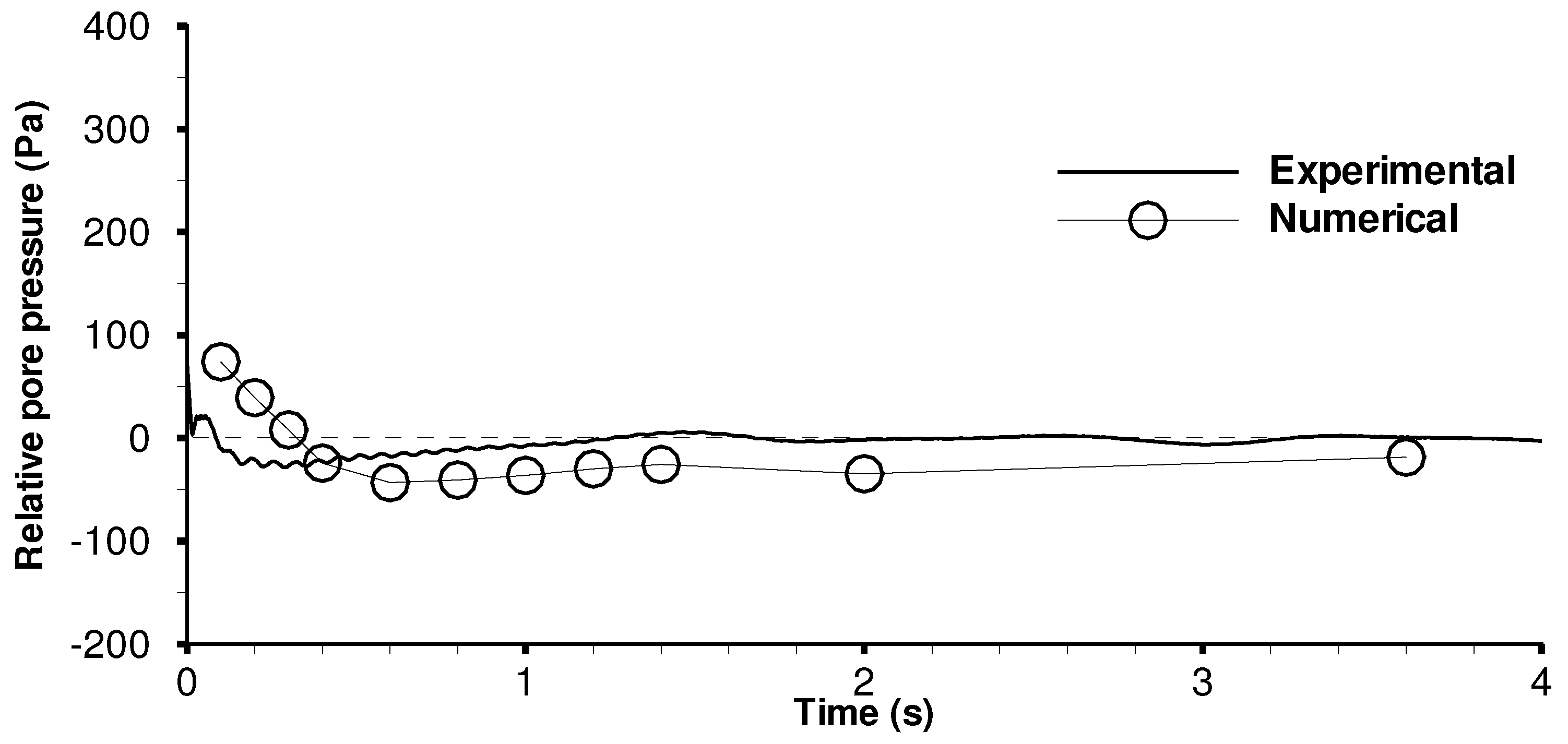
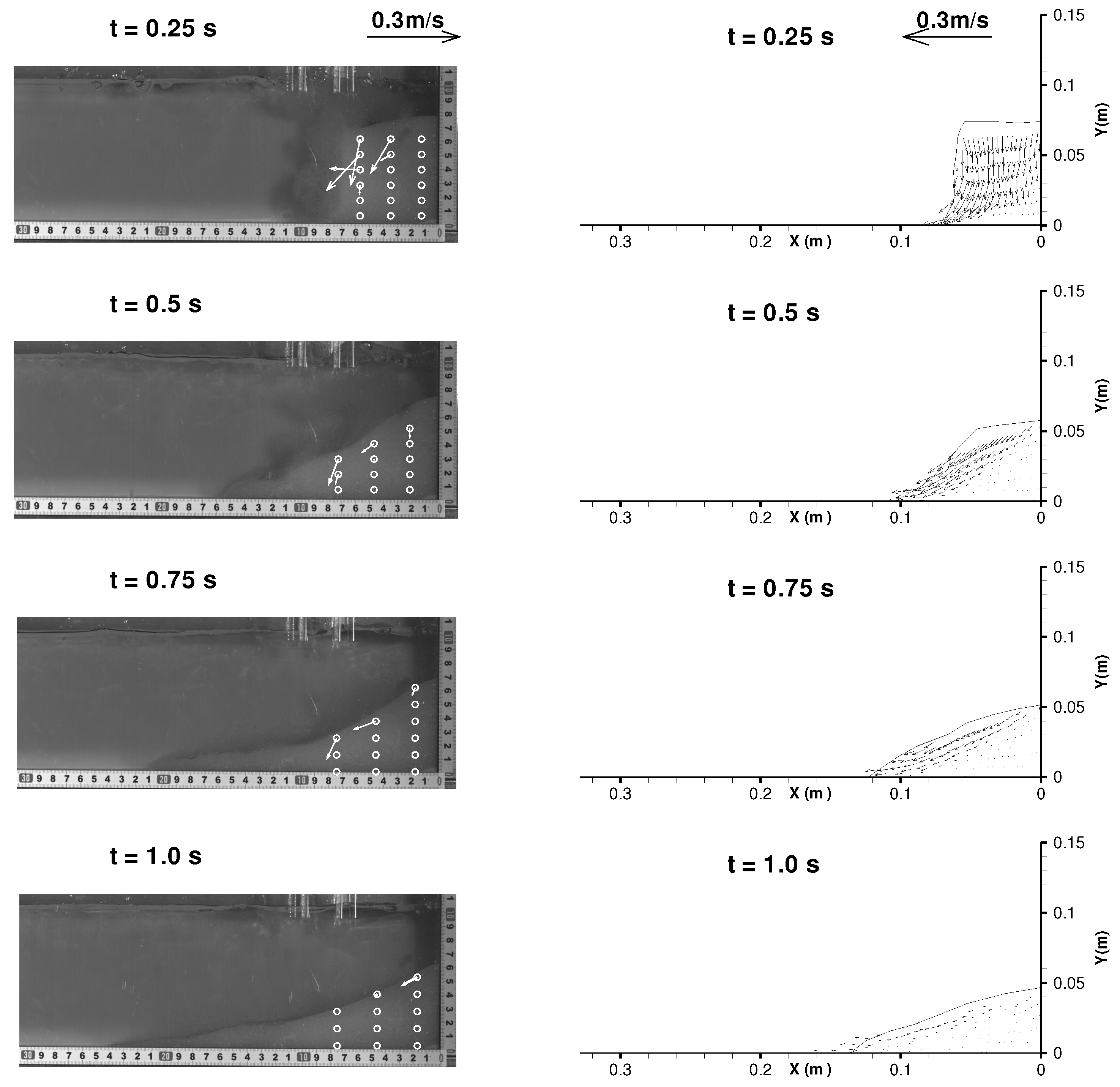
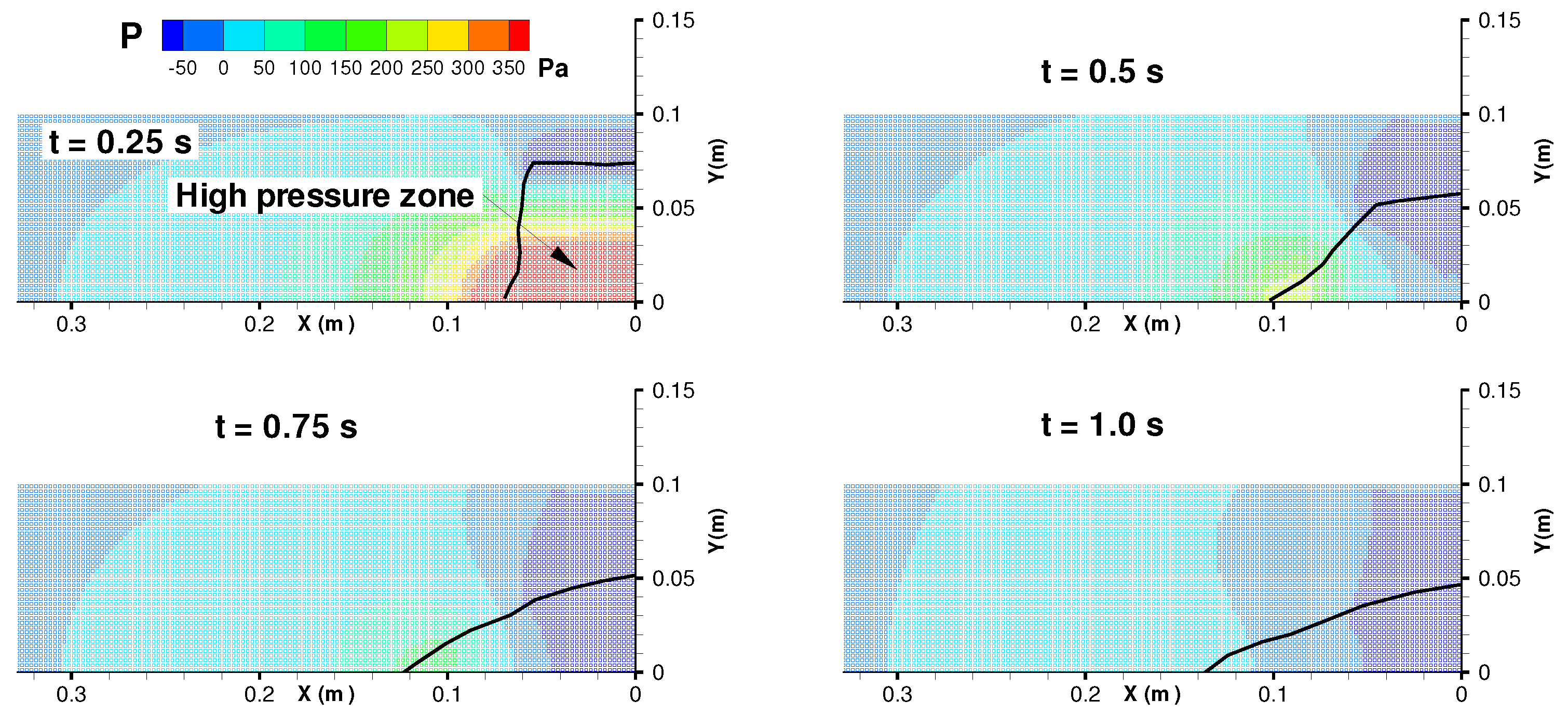
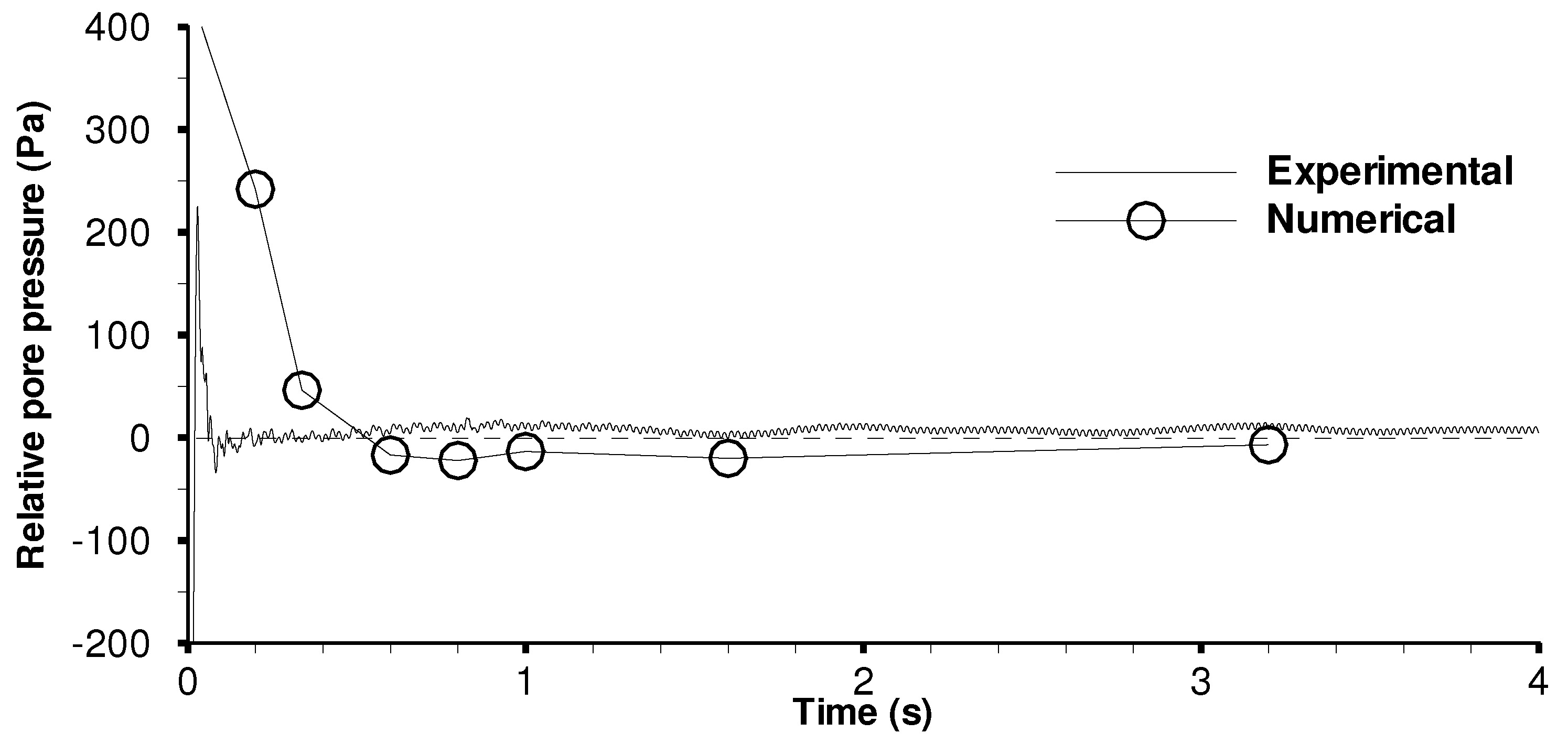
4.2. Submerged Granular Column Collapse
4.3. Dense Packing Column Collapse
4.4. Loose Packing Column Collapse
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Iverson, R.M. The physics of debris flows. Rev. Geophys. 1997, 35, 245–296. [Google Scholar] [CrossRef] [Green Version]
- Legros, F. The mobility of long-runout landslides. Eng. Geol. 2002, 63, 301–331. [Google Scholar] [CrossRef]
- Hampton, M.A.; Lee, H.J.; Locat, J. Submarine landslides. Rev. Geophys. 1996, 34, 33–59. [Google Scholar] [CrossRef]
- Pelinovsky, E.; Poplavsky, A. Simplified model of tsunami generation by submarine landslides. Phys. Chem. Earth 1996, 21, 13–17. [Google Scholar] [CrossRef]
- Pailha, M.; Pouliquen, O. A two-phase flow description of the initiation of underwater granular avalanches. J. Fluid Mech. 2009, 633, 115–135. [Google Scholar] [CrossRef]
- Meruane, C.; Tamburrino, A.; Roche, O. On the role of the ambient fluid on gravitational granular flow dynamics. J. Fluid Mech. 2010, 648, 381–404. [Google Scholar] [CrossRef]
- Meruane, C.; Tamburrino, A.; Roche, O. Dynamics of dense granular flows of small-and-large-grain mixtures in an ambient fluid. Phys. Rev. E 2012, 86, 026311. [Google Scholar] [CrossRef]
- Rondon, L.; Pouliquen, O.; Aussillous, P. Granular collapse in a fluid: Role of the initial volume fraction. Phys. Fluids 2011, 23, 073301. [Google Scholar] [CrossRef] [Green Version]
- Topin, V.; Monerie, Y.; Perales, F.; Radjaï, F. Collapse dynamics and runout of dense granular materials in a fluid. Phys. Rev. Lett. 2012, 109, 188001. [Google Scholar] [CrossRef] [Green Version]
- Savage, S.; Babaei, M.; Dabros, T. Modeling gravitational collapse of rectangular granular piles in air and water. Mech. Res. Commun. 2014, 56, 1–10. [Google Scholar] [CrossRef]
- Si, P.; Shi, H.; Yu, X. Development of a mathematical model for submarine granular flows. Phys. Fluids 2018, 30, 083302. [Google Scholar] [CrossRef]
- Wang, C.; Wang, Y.; Peng, C.; Meng, X. Smoothed particle hydrodynamics simulation of water-soil mixture flows. J. Hydraul. Eng. 2016, 142, 04016032. [Google Scholar] [CrossRef] [Green Version]
- Wang, C.; Wang, Y.; Peng, C.; Meng, X. Dilatancy and compaction effects on the submerged granular column collapse. Phys. Fluids 2017, 29, 103307. [Google Scholar] [CrossRef]
- Wang, C.; Wang, Y.; Peng, C.; Meng, X. Two-fluid smoothed particle hydrodynamics simulation of submerged granular column collapse. Mech. Res. Commun. 2017, 79, 15–23. [Google Scholar] [CrossRef]
- Yuan, Q.; Wang, C.; Wang, Y.; Peng, C.; Meng, X. Investigation of submerged soil excavation by high velocity water jet using two-fluid smoothed particle hydrodynamics method. J. Hydraul. Eng. 2019, 145, 04019016. [Google Scholar] [CrossRef]
- Chen, F.; Qiang, H.; Zhang, H.; Gao, W. A coupled SDPH-FVM method for gas-particle multiphase flow: Methodology. Int. J. Numer. Methods Eng. 2016, 109, 73–101. [Google Scholar] [CrossRef]
- Hirt, C.; Nichols, B. Volume of fluid (vof) method for the dynamics of free boundaries. J. Comput. Phys. 1981, 39, 201–225. [Google Scholar] [CrossRef]
- Bui, H.H.; Fukagawa, R.; Sako, K.; Ohno, S. Lagrangian meshfree particles method (SPH) for large deformation and failure flows of geomaterial using elastic-plastic soil constitutive model. Int. J. Numer. Anal. Methods Geomech. 2008, 32, 1537–1570. [Google Scholar] [CrossRef]
- Pailha, M.; Nicolas, M.; Pouliquen, O. Initiation of underwater granular avalanches: Influence of the initial volume fraction. Phys. Fluids 2008, 20, 111701. [Google Scholar] [CrossRef]
- Andreotti, B.; Forterre, Y.; Pouliquen, O. Granular Media: Between Fluid and Solid; Cambridge University Press: Cambridge, UK, 2013. [Google Scholar]
- Iverson, R.M. Landslide triggering by rain infiltration. Water Resour. Res. 2000, 36, 1897–1910. [Google Scholar] [CrossRef] [Green Version]
- Iverson, R.M. Regulation of landslide motion by dilatancy and pore pressure feedback. J. Geophys. Res. 2005, 110. [Google Scholar] [CrossRef]
- Crespo, A.; Gómez-Gesteira, M.; Dalrymple, R.A. Boundary conditions generated by dynamic particles in sph methods. Comput. Mater. Continua. 2007, 5, 173–184. [Google Scholar]
- Lube, G.; Huppert, H.E.; Sparks, R.S.J.; Freundt, A. Collapses of two-dimensional granular columns. Phys. Rev. E 2005, 72, 1301–1310. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bui, H.H.; Fukagawa, R.; Sako, K.; Wells, J. Slope stability analysis and discontinuous slope failure simulation by elasto-plastic smoothed particle hydrodynamics (SPH). Geotechnique 2011, 61, 565–574. [Google Scholar] [CrossRef]
- Li, Y.; Lin, Z.; Jing, H.; Yang, S. High-accuracy digital speckle correlation method for rock with dynamic fractures. Chin. J. Geotech. Eng. 2012, 34, 1060–1068. (In Chinese) [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Property | Symbol | Value |
|---|---|---|
| True density | 2700 | |
| Young’s modulus | E | 70 MPa |
| Poisson’s ration | 0.3 | |
| Internal friction angle | ||
| Cohesion | c | 0 |
| Dilatancy angle |
| Property | Symbol | Value |
|---|---|---|
| True density of granular material | 2700 | |
| Young’s modulus of granular material | E | 70 MPa |
| Poisson’s ration of granular material | 0.3 | |
| Internal friction angle of granular material | ||
| Cohesion of granular material | c | 0 |
| Initial volume fraction of granular material | 0.55 (loose), 0.60 (dense) | |
| Hydraulic conductivity of granular material | k | 0.005 m/s |
| Viscosity of the water | 0.001 | |
| Initial true density of the water | 1000 | |
| Mean granular diameter (glass beads) | d | 225 m |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, C.; Ye, G.; Meng, X.; Wang, Y.; Peng, C. A Eulerian–Lagrangian Coupled Method for the Simulation of Submerged Granular Column Collapse. J. Mar. Sci. Eng. 2021, 9, 617. https://doi.org/10.3390/jmse9060617
Wang C, Ye G, Meng X, Wang Y, Peng C. A Eulerian–Lagrangian Coupled Method for the Simulation of Submerged Granular Column Collapse. Journal of Marine Science and Engineering. 2021; 9(6):617. https://doi.org/10.3390/jmse9060617
Chicago/Turabian StyleWang, Chun, Guanlin Ye, Xiannan Meng, Yongqi Wang, and Chong Peng. 2021. "A Eulerian–Lagrangian Coupled Method for the Simulation of Submerged Granular Column Collapse" Journal of Marine Science and Engineering 9, no. 6: 617. https://doi.org/10.3390/jmse9060617