
Maneuverability and Hydrodynamics of a Tethered Underwater Robot Based on Mixing Grid Technique

Abstract
:1. Introduction
2. Numerical Method
2.1. The Governing Equations of Flow Field
2.2. The Governing Equations of the Underwater Robot
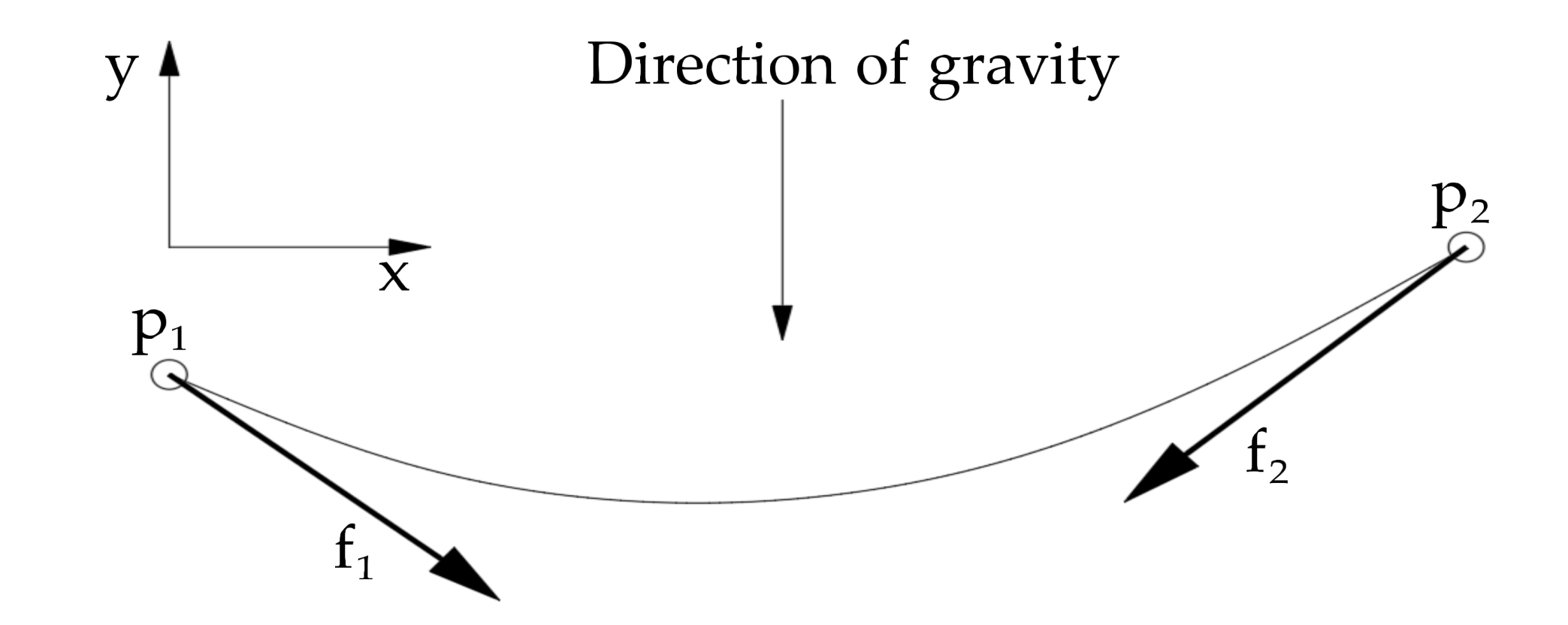
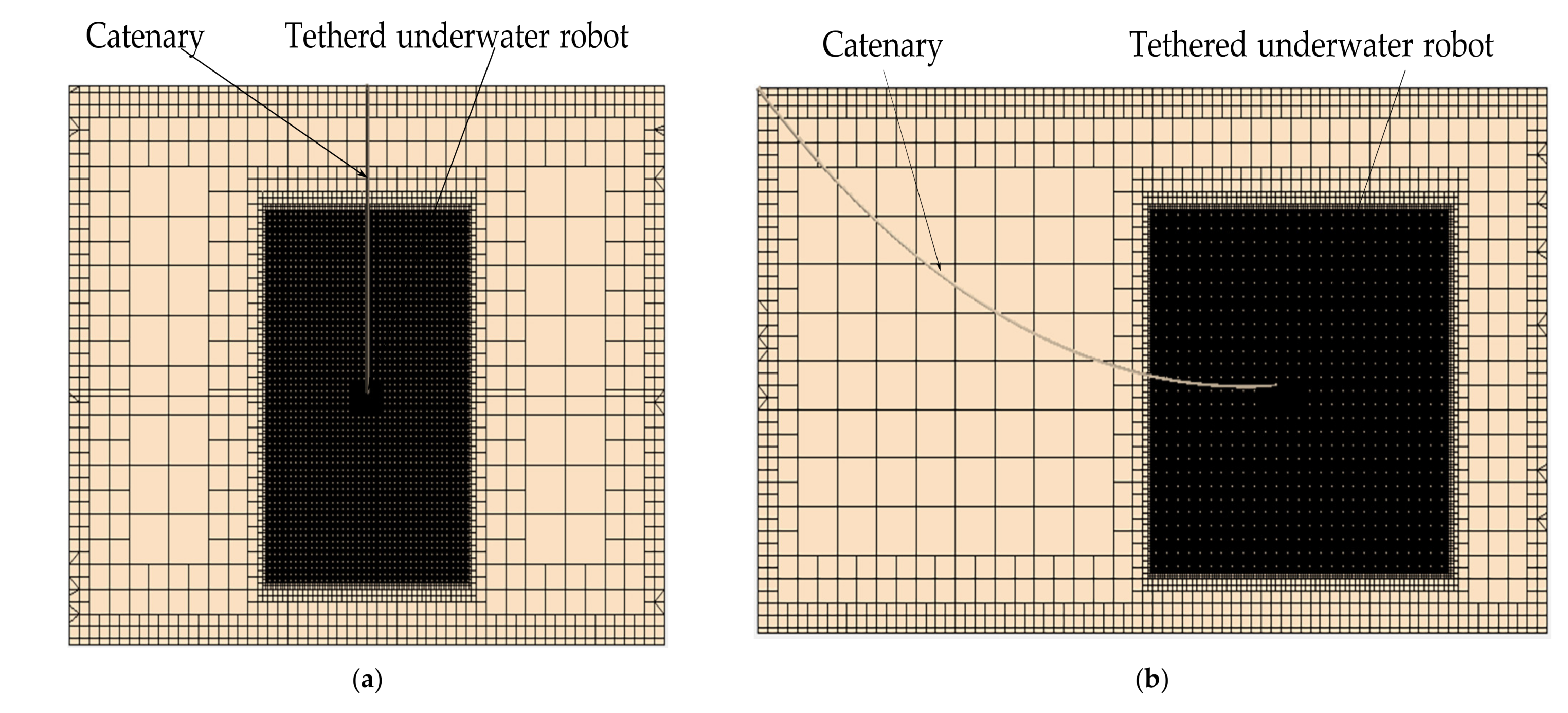
2.3. The Governing Equations of the Cable
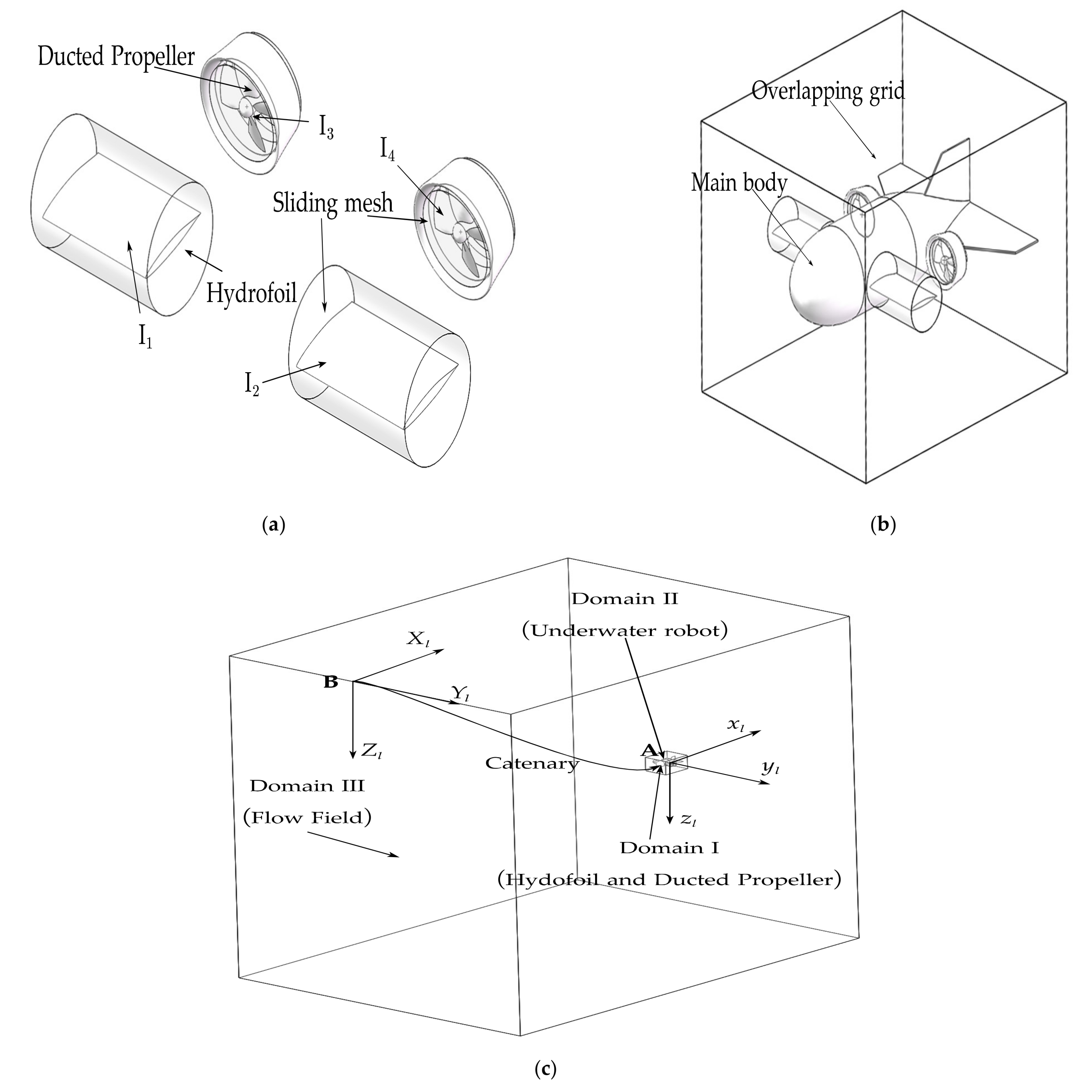
2.4. The Sliding Mesh
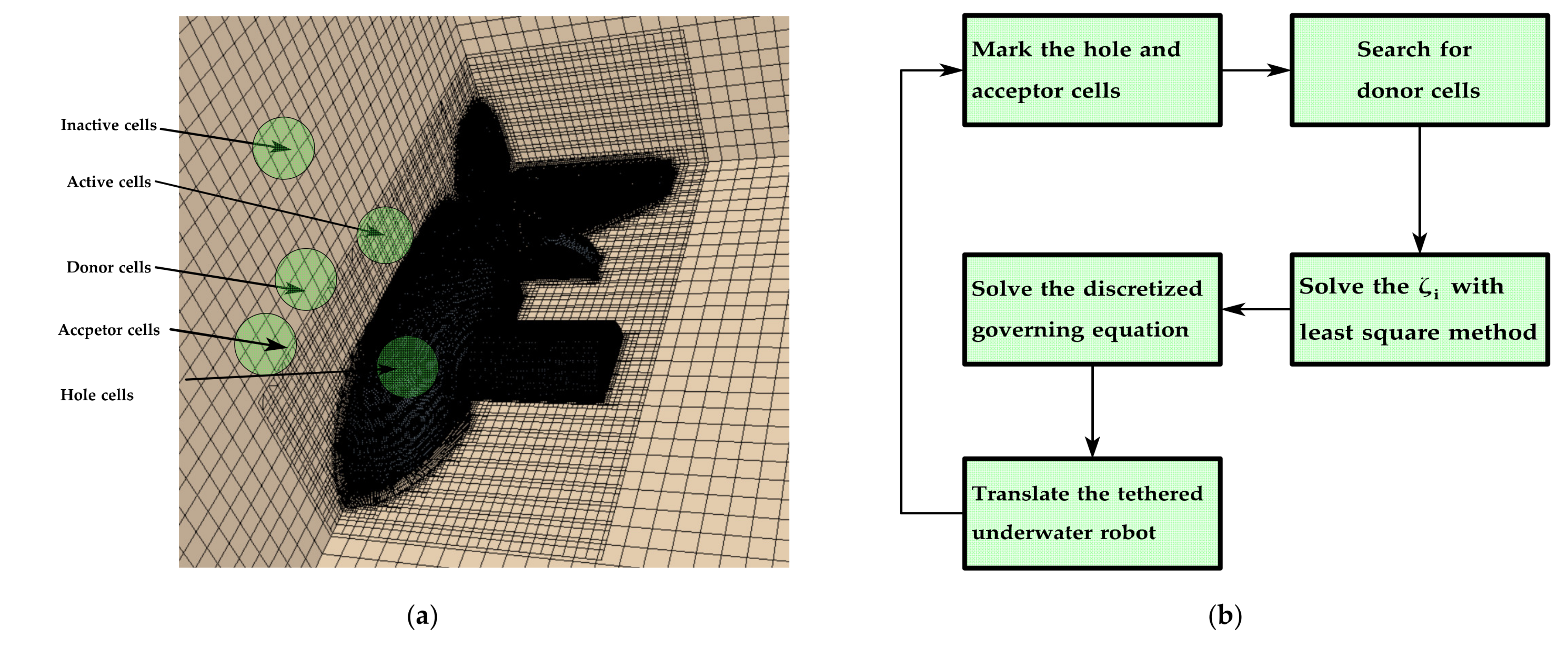
2.5. The Overlapping Grid
3. Numerical Computation Setup
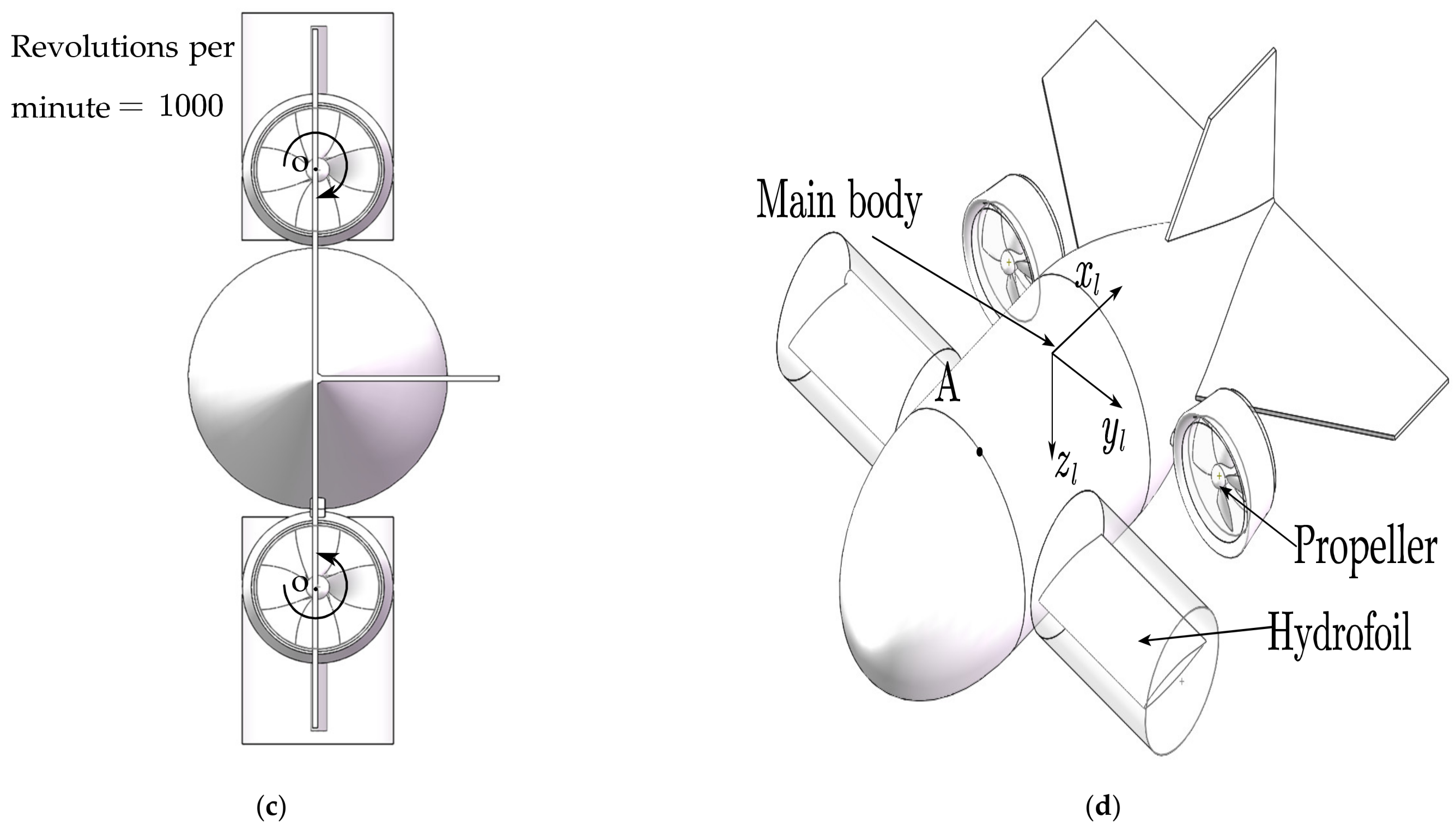
3.1. Geometric Model of the Tethered Underwater Robot
3.2. Determination of Computational Domain and Boundary
3.3. Coordinate Systems of the Tethered Underwater Robot
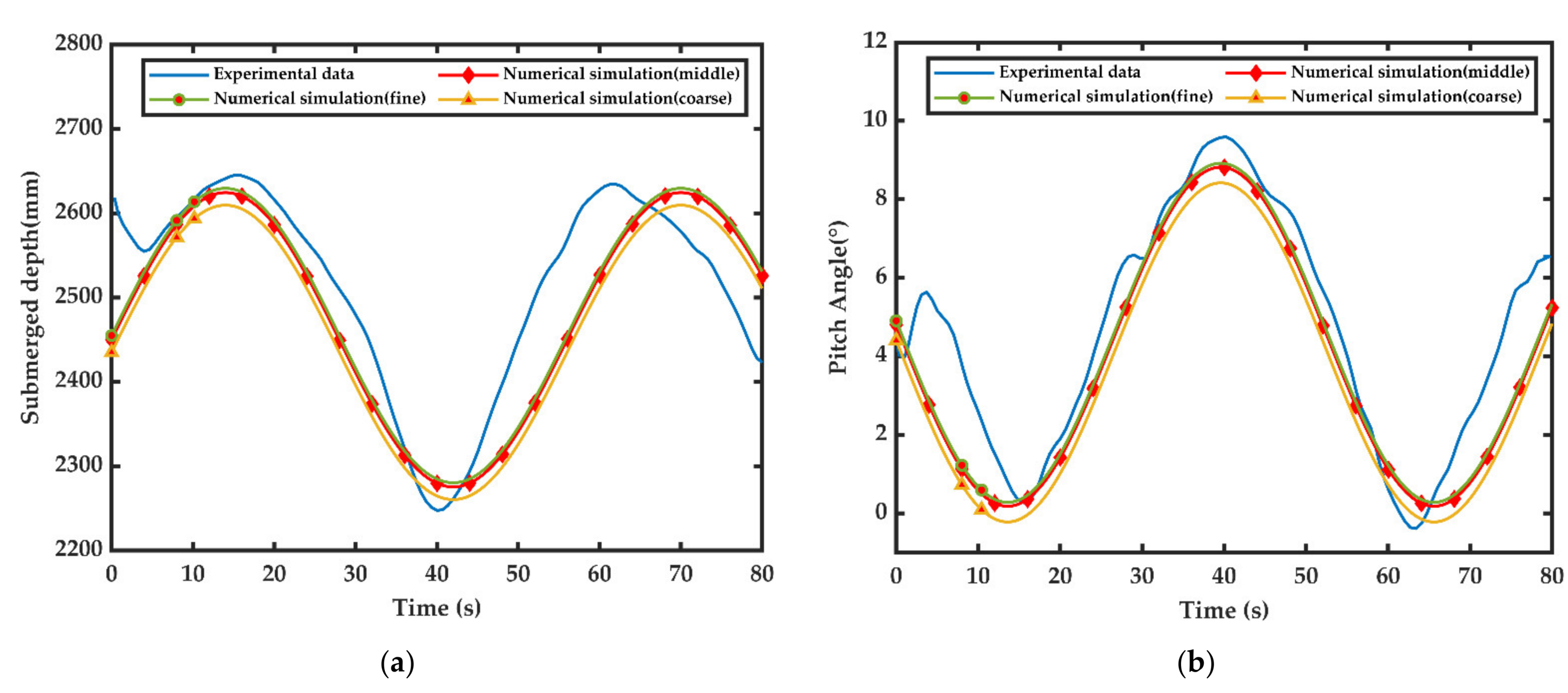
3.4. Validation of the Numerical Method with Experimental Results
4. Results and Discussions
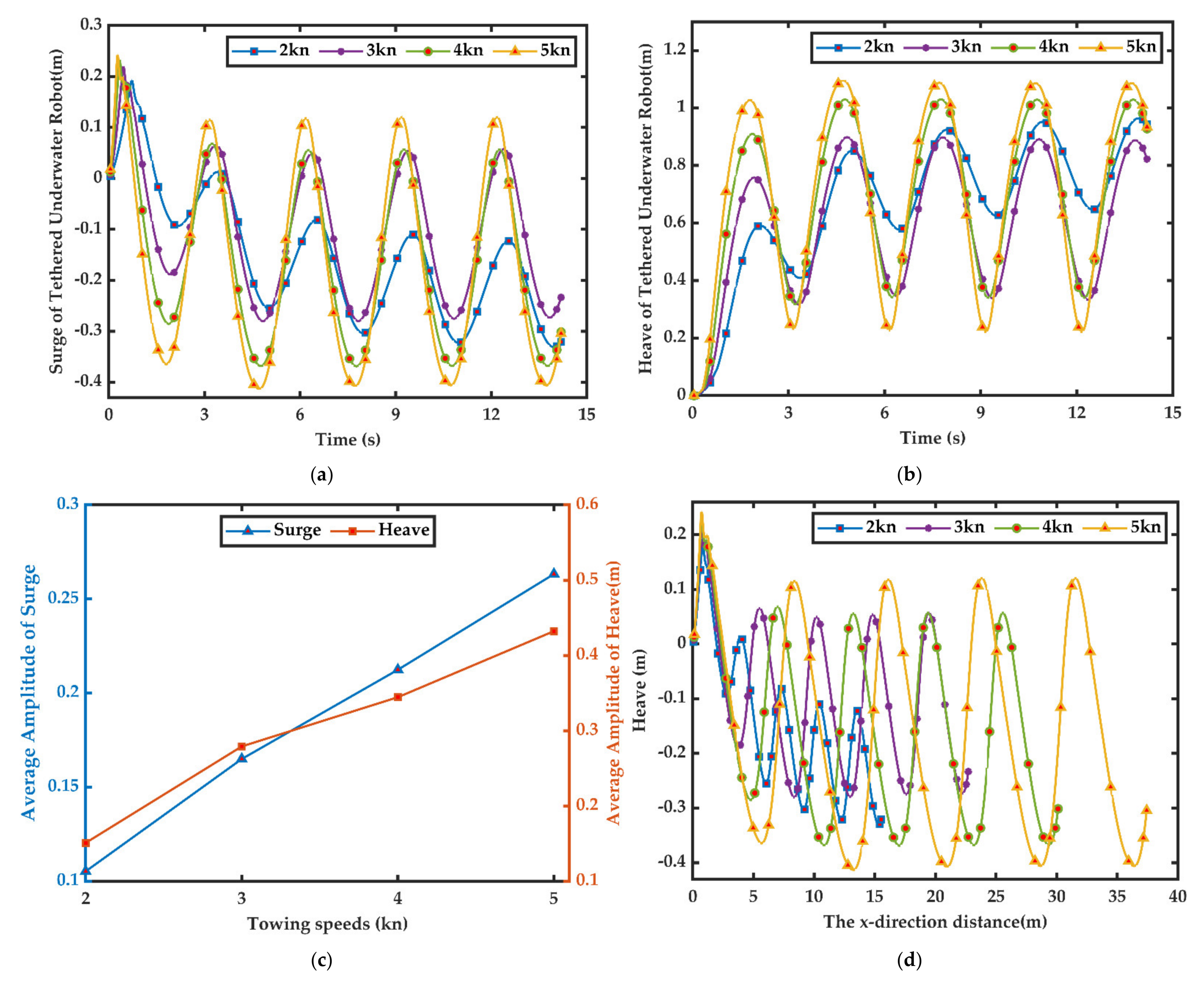
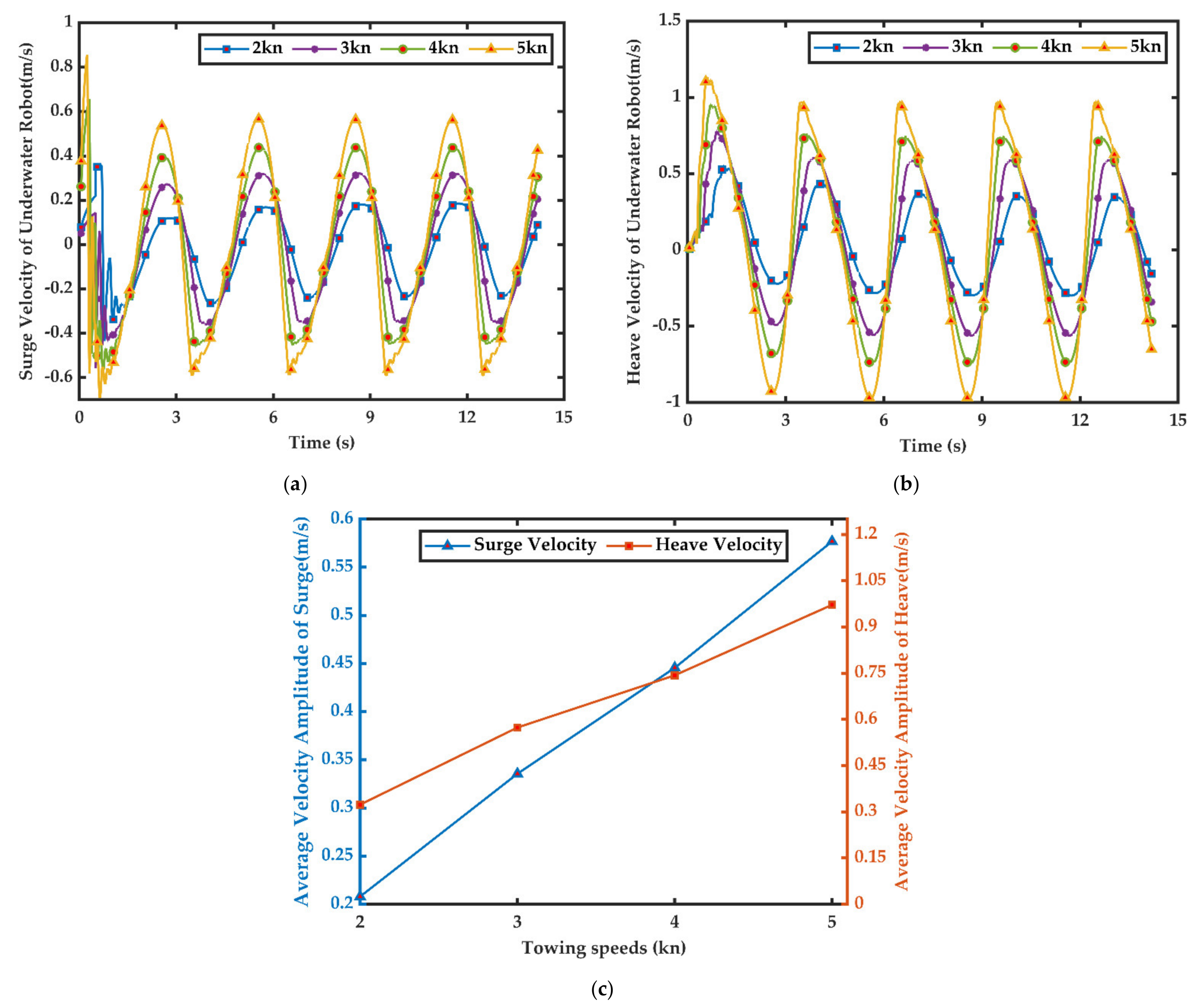
4.1. Trajectory and Hydrodynamic Performance of the Tetherd Underwater Robot
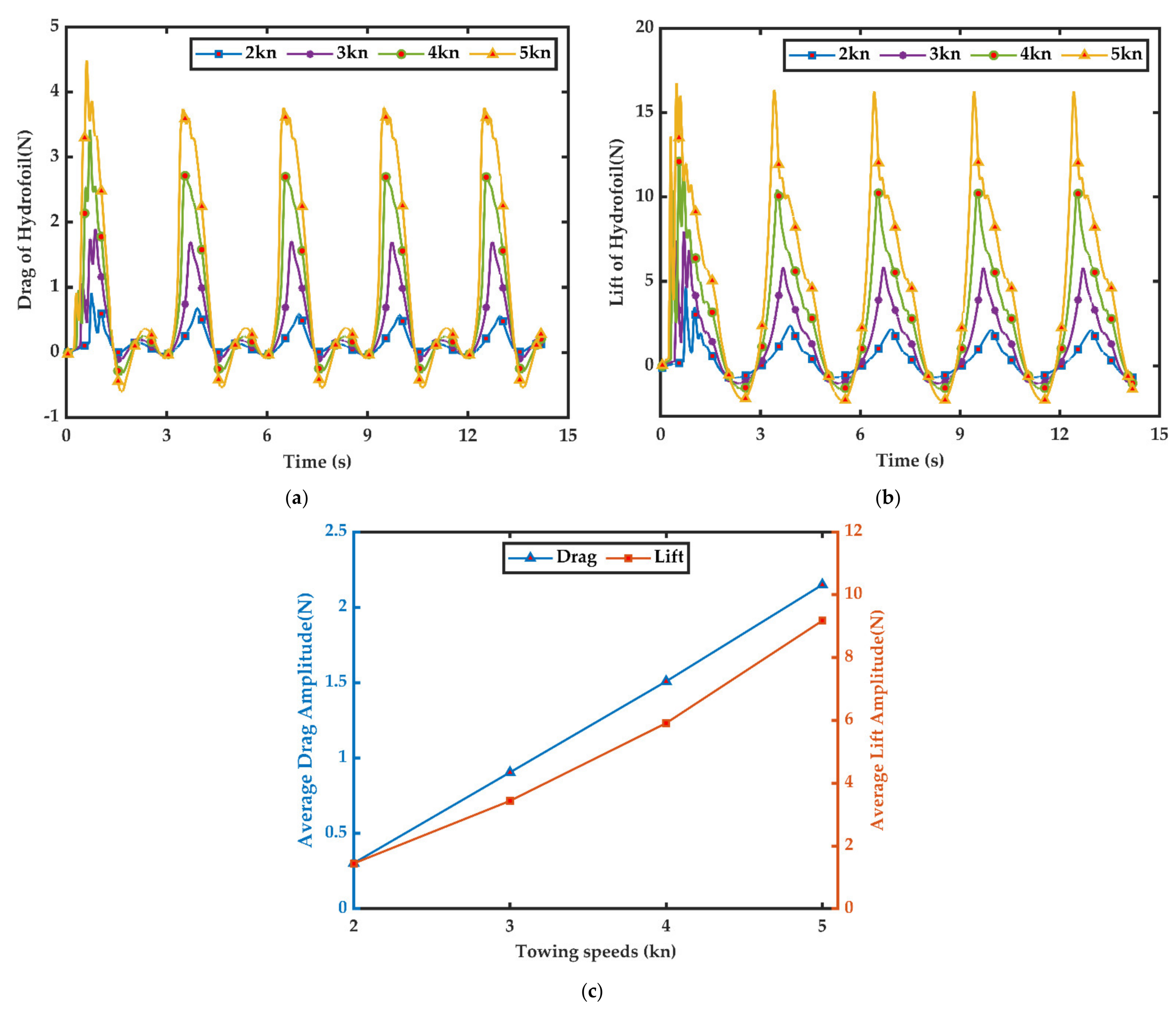
4.2. The Hydrofoil of the Tetherd Underwater Robot
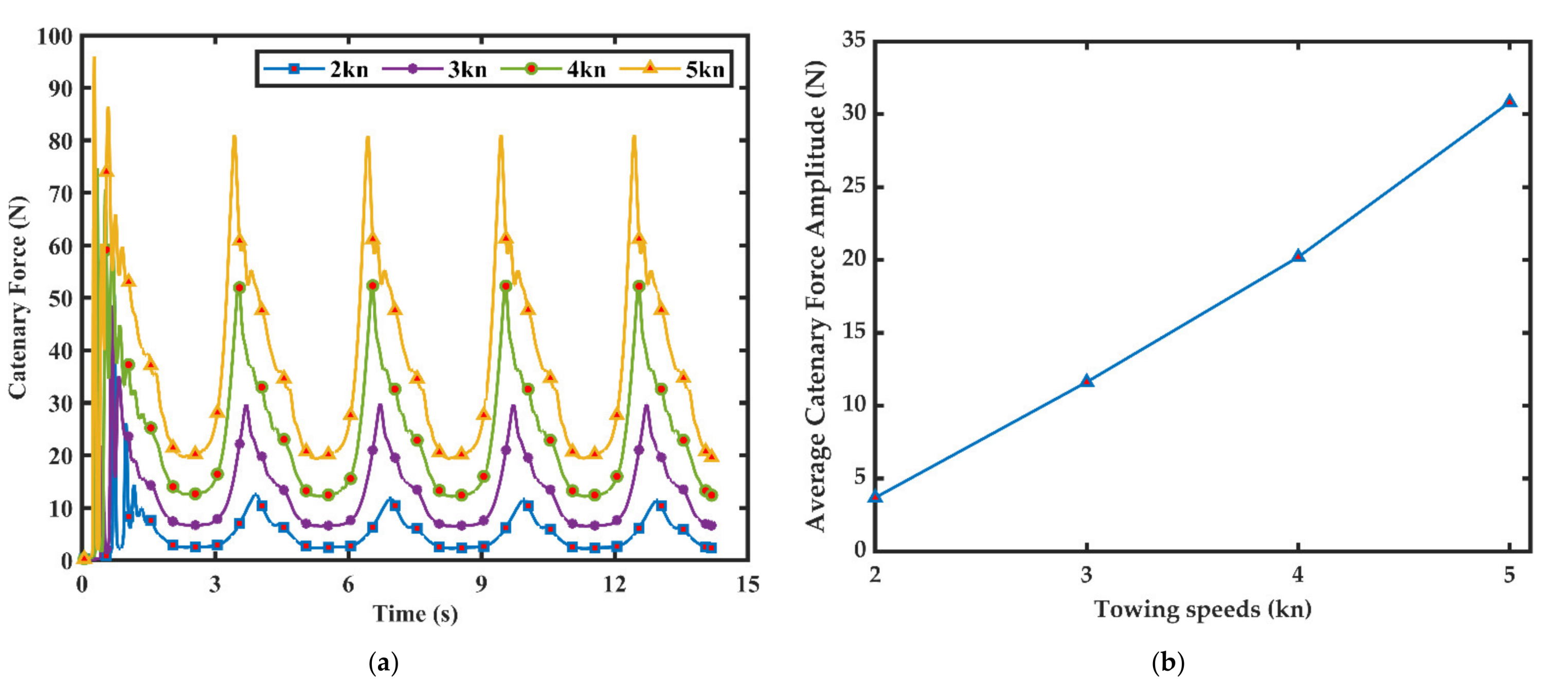
4.3. The Cable of the Tetherd Underwater Robot
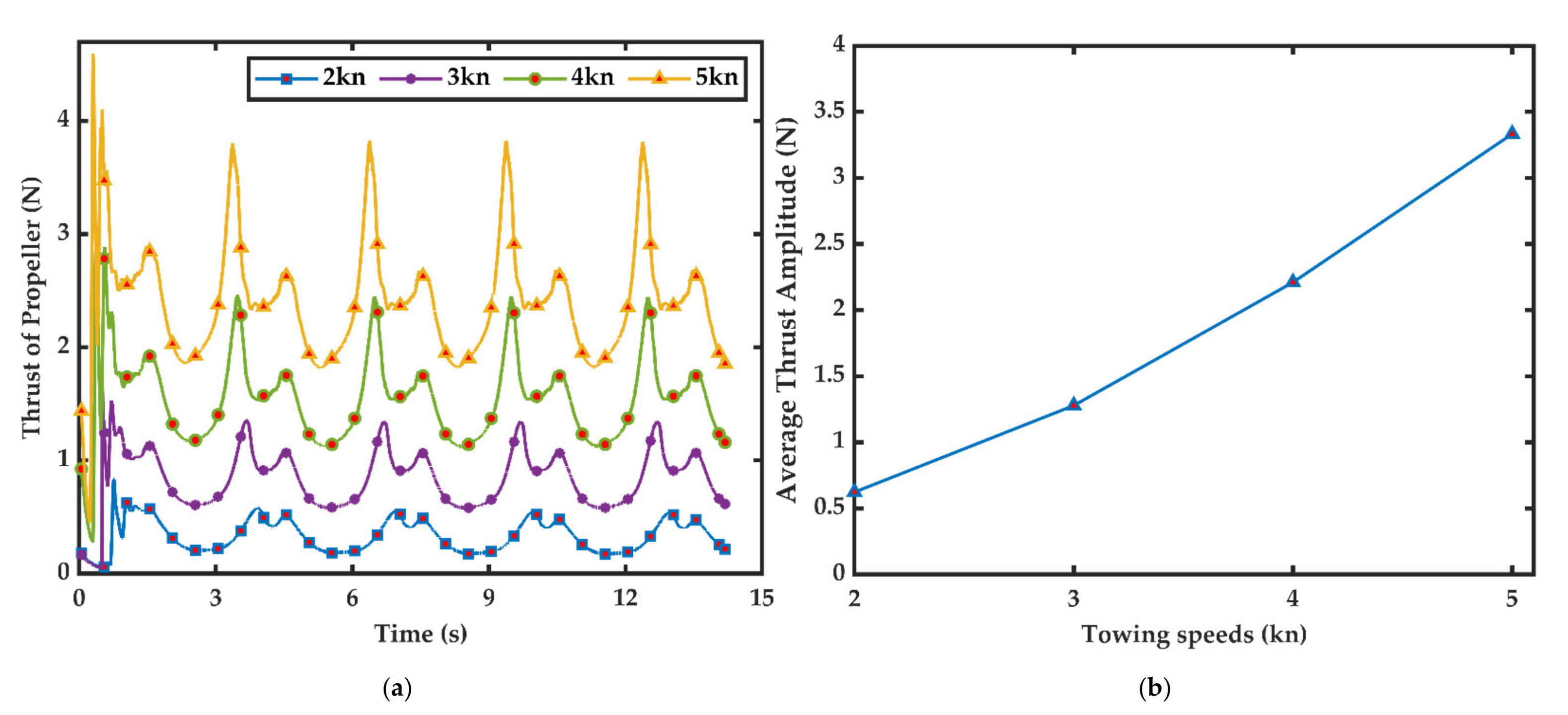
4.4. The Ducted Propeller of the Tetherd Underwater Robot
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Li, X.F.Y.L.; Wang, H.W. Modeling and Dynamics Analysis of Work-Class ROV Propeller; Transaction of Beijing Institute of Technology: Beijing, China, 2018; Volume 8, pp. 612–618. [Google Scholar]
- Ablow, C.; Schechter, S. Numerical simulation of undersea cable dynamics. Ocean Eng. 1983, 10, 443–457. [Google Scholar] [CrossRef]
- Chai, Y.T.; Varyani, K.S.; Barltrop, N.D.P. Three-dimensional Lump-Mass formulation of a catenary riser with bending, torsion and irregular seabed interaction effect. Ocean Eng. 2002, 29, 1503–1525. [Google Scholar] [CrossRef]
- Walton, T.S.; Polachek, H. Calculation of Transient Motion of Submerged Cables. Math. Comput. 1960, 14, 27–46. [Google Scholar] [CrossRef]
- Luis Álvaro, R.; Armesto, J.A.; Guanche, R.; Barrera, C.; Vidal, C. Simulation of Marine Towing Cable Dynamics Using a Finite Elements Method. J. Mar. Sci. Eng. 2020, 8, 140. [Google Scholar] [CrossRef] [Green Version]
- Laranjeira, M.; Dune, C.; Hugel, V. Catenary-based visual servoing for tether shape control between underwater vehicles. Ocean Eng. 2020, 200, 107018. [Google Scholar] [CrossRef]
- Palm, J.; Eskilsson, C. Influence of Bending Stiffness on Snap Loads in Marine Cables: A Study Using a High-Order Discontinuous Galerkin Method. J. Mar. Sci. Eng. 2020, 8, 795. [Google Scholar] [CrossRef]
- Li, Q.; Cao, Y.; Li, B.; Ingram, D.M.; Kiprakis, A. Numerical Modelling and Experimental Testing of the Hydrody-namic Characteristics for an Open-Frame Remotely Operated Vehicle. J. Mar. Sci. Eng. 2020, 8, 688. [Google Scholar] [CrossRef]
- Wu, J.; Chwang, A.T. A hydrodynamic model of a two-part underwater towed system. Ocean Eng. 2000, 27, 455–472. [Google Scholar] [CrossRef]
- Wu, J.; Chen, D. Trajectory Following of a Tethered Underwater Robot with Multiple Control Techniques. J. Offshore Mech. Arct. Eng. 2019, 141, 051104. [Google Scholar] [CrossRef]
- Wu, J.; Ye, J.; Yang, C.; Chen, Y.; Tian, H.; Xiong, X. Experimental study on a controllable underwater towed system. Ocean Eng. 2005, 32, 1803–1817. [Google Scholar] [CrossRef]
- Park, H.I.; Jung, D.H.; Koterayama, W. A numerical and experimental study on dynamics of a towed low tension cable. Appl. Ocean Res. 2003, 25, 289–299. [Google Scholar] [CrossRef]
- Bagheri, A.; Karimi, T.; Amanifard, N. Tracking performance control of a cable communicated underwater vehicle using adaptive neural network controllers. Appl. Soft Comput. 2010, 10, 908–918. [Google Scholar] [CrossRef]
- Guerrero, J.; Torres, J.; Creuze, V.; Chemori, A.; Campos, E. Saturation based nonlinear PID control for underwater vehicles: Design, stability analysis and experiments. Mechatronics 2019, 61, 96–105. [Google Scholar] [CrossRef] [Green Version]
- Zhang, G.; Huang, H.; Qin, H.; Wan, L.; Li, Y.; Cao, J.; Su, Y. A novel adaptive second order sliding mode path following control for a portable AUV. Ocean Eng. 2018, 151, 82–92. [Google Scholar] [CrossRef]
- Chen, D.J.; Wu, J.M. Control simulation and hydrodynamics analysis of a tethered underwater robot. J. Ship Mech. 2020, 24, 170–178. [Google Scholar]
- Zhou, H.; Wei, Z.; Zeng, Z.; Yu, C.; Yao, B.; Lian, L. Adaptive robust sliding mode control of autonomous underwater glider with input constraints for persistent virtual mooring. Appl. Ocean Res. 2020, 95, 102027. [Google Scholar] [CrossRef]
- Yu, L.; Meng, Q.; Zhang, H. 3-Dimensional Modeling and Attitude Control of Multi-Joint Autonomous Underwater Vehicles. J. Mar. Sci. Eng. 2021, 9, 307. [Google Scholar] [CrossRef]
- Zhou, B.; Zhao, M. Numerical simulation of thruster-thruster interaction for ROV with vector layout propulsion system. Ocean Eng. 2020, 210, 107542. [Google Scholar] [CrossRef]
- Vu, M.T.; Choi, H.; Kang, J.; Ji, D.-H.; Jeong, S.-K. A study on hovering motion of the underwater vehicle with umbilical cable. Ocean Eng. 2017, 135, 137–157. [Google Scholar] [CrossRef]
- Fang, M.-C.; Hou, C.-S.; Luo, J.-H. On the motions of the underwater remotely operated vehicle with the umbilical cable effect. Ocean Eng. 2007, 34, 1275–1289. [Google Scholar] [CrossRef]
- Wu, J.M.; Yu, M.; Zhu, L.L. A hydrodynamic model for a tethered underwater robot and dynamic analysis of the robot in turning motion. J. Ship Mech. 2011, 15, 827–836. [Google Scholar]
- Wu, J.M.; Ye, Z.J.; Jin, X.D.; Zhang, C.W.; Xu, Y. Analysis of thrust characteristics of ducted propeller in underwater vehicle with yawing motion. J. South China Univ. Technol. 2015, 43, 141–148. [Google Scholar]
- Tsan-Hsing Shih, W.W.L.; Aamir, S.Z.Y.; Zhu, J. A new k-ε eddy viscosity model for high reynolds number turbulent flows. Comput. Fluids 1995, 24, 227–238. [Google Scholar] [CrossRef]
- Gertler, M.; Hagen, G.R. Standard Equations of Motion for Submarine Simulation; Defense Technical Information Center (DTIC): Fort Belvoir, VA, USA, 1967. [Google Scholar]
- Hongwei, Z.; Shuxin, W.; Wei, H.; Manli, H. Research on 3D modeling of propeller. Mach. Tool Hydraul. 2006, 60, 3. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Main Dimensions of the Tethered Underwater Robot: |
|---|
| length = 0.330 m, width = 0.270 m, height = 0.140 m |
| Center of gravity in the local coordinate system: |
| XG= 0.187 m, YG = 0.000 m, ZG = 0.000 m |
| m = 1.873 kg |
| Ka 4-70/19A Propellers: |
| Diameter: 47.3 mm |
| Disk area ratio: 0.7 |
| Pitch diameter ratio: 0.99 |
| Leaf inclination: 8° |
| Hub diameter ratio: 0.18 |
| The rotational speed: 1000 rpm |
| Origin of the propeller coordinates in the local coordinate system: |
| Left Propeller: x1 = 0.065 m, y1 = 0.080 m, z1 = 0 m |
| Right Propeller:− x2 = 0.065 m, y2 =0.080 m, z2 = 0 m |
| NACA66 hydrofoils: |
| Chord: 50 mm |
| Span: 80 mm |
| Angle of attack: −15°~15° |
| Camber ratio: 2% |
| Relative thickness 12% |
| Origin of the hydrofoil coordinates in the local coordinate system: |
| Left hydrofoil: x3 = −0.060 m, y3 = 0.135 m, z3 = 0 m |
| Right hydrofoil: x4 = −0.060 m, y4 = −0.135 m, z4 = 0 m |
| Towing cable: |
| Length: 6.0 m |
| Stiffness: 5000 N/m |
| Mass per unit length: 0.008 kg/m |
| Connecting points in the global coordinate system: |
| Point A: xA = 5.500 m, yA = 0 m, zA = 3.000 m |
| Point B (the connecting point): xB = 0 m, yB = 0 m, zB = 0 m |
| Region | Geometry | Boundary Conditions |
|---|---|---|
| Domain I | Hydrofoils and Ducted propellers | Wall |
| Domain I and Domain II | The surfaces of the Cylinders | Interface |
| Domain II | The tethered underwater robot | Wall |
| Domain II | The cuboid includes the tethered underwater robot | Overlap grid |
| Domain II and Domain III | The surfaces of the cuboid | Overlap grid |
| Domain III | The surface of left and right, top and bottom | symmetry |
| Domain III | The surface of front | Velocity inlet |
| Domain III | The surface of back | Pressure outlet |
| Domain | Number of Meshes (m) | Minimum Size of Mesh (m) | Maximum Size of Mesh (m) |
|---|---|---|---|
| I | 5.63 × 105 | 0.0025 | 1 |
| II | 9.41 × 105 | 0.0025 | 1 |
| III | 9.55 × 106 | 0.0025 | 1 |
| The Submerged Depth (mm) | The Relative Error | The Pitch Angle (°) | The Relative Error | |
|---|---|---|---|---|
| Coarse (9 × 106) | 2442.418 | 4.554% | 8.415 | 12.262% |
| Middle (1.1 × 107) | 2453.371 | 4.122% | 8.813 | 8.111% |
| Fine (1.3 × 107) | 2458.154 | 3.939% | 8.855 | 7.673% |
| Experiment | 2558.957 | --- | 9.591 | --- |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, J.; Xu, S.; Liao, H.; Ma, C.; Yang, X.; Wang, H.; Zhang, T.; Han, X. Maneuverability and Hydrodynamics of a Tethered Underwater Robot Based on Mixing Grid Technique. J. Mar. Sci. Eng. 2021, 9, 561. https://doi.org/10.3390/jmse9060561
Wu J, Xu S, Liao H, Ma C, Yang X, Wang H, Zhang T, Han X. Maneuverability and Hydrodynamics of a Tethered Underwater Robot Based on Mixing Grid Technique. Journal of Marine Science and Engineering. 2021; 9(6):561. https://doi.org/10.3390/jmse9060561
Chicago/Turabian StyleWu, Jiaming, Shunyuan Xu, Hua Liao, Chenghua Ma, Xianyuan Yang, Haotian Wang, Tian Zhang, and Xiangxi Han. 2021. "Maneuverability and Hydrodynamics of a Tethered Underwater Robot Based on Mixing Grid Technique" Journal of Marine Science and Engineering 9, no. 6: 561. https://doi.org/10.3390/jmse9060561